Como trabalhar com uma base de terceiros por rádio UHF
Este guia explica como configurar o Reach RS4/RS4 Pro para funcionar com uma base de terceiros por rádio UHF.
Visão geral
Você pode configurar seu Reach RS4 ou Reach RS4 Pro como um rover para trabalhar com uma base de terceiros por rádio UHF.
O Reach RS4 e o Reach RS4 Pro têm um rádio UHF integrado que opera na banda de 410-470 MHz, fornece até 2 W de potência de saída e funciona usando o protocolo Trimtalk 450S*, com limites regionais aplicados de acordo com as normas locais. O Reach RS4 pode transmitir e receber correções RTK em UHF. Na maioria das regiões, a série RS4 é fornecida com planos de canais específicos da região e limites de potência pré-configurados no Emlid Flow para oferecer suporte à operação compatível. Dependendo de sua jurisdição, a operação em UHF ainda pode exigir uma licença.
Para configurar a comunicação por rádio UHF, use a antena UHF fornecida.
*Marca registrada da Trimble Inc.
Configure sua base de terceiros
Defina as configurações de RTK e a comunicação de rádio UHF em sua base de terceiros. Os detalhes da configuração dependem do modelo de base que você está usando.
Para configurar adequadamente sua base de terceiros, siga as instruções do fabricante.
Configure seu rover Reach RS4 / RS4 Pro
Para configurar seu rover, siga as etapas abaixo:
-
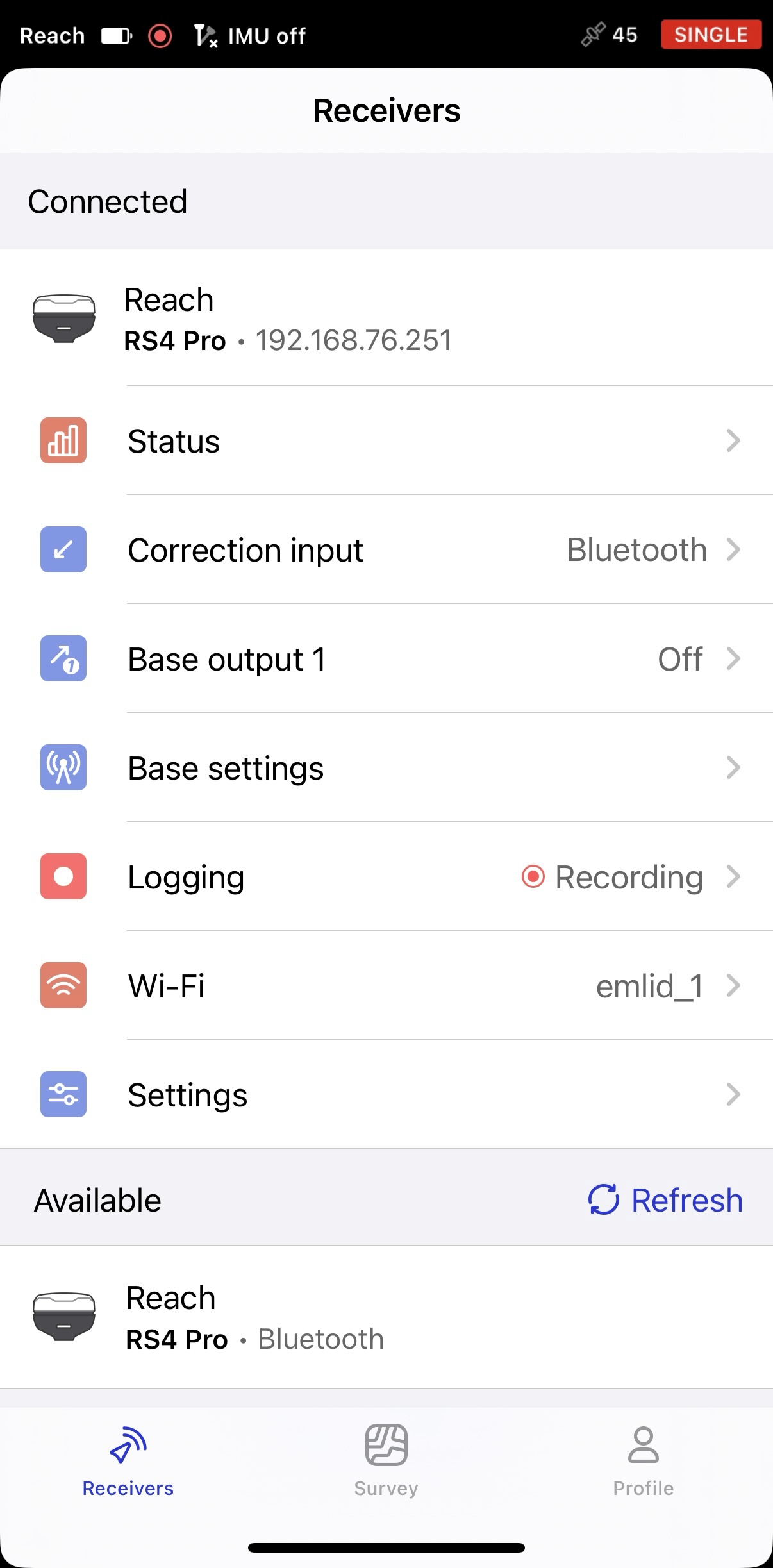
Abra o aplicativo Emlid Flow e conecte-se ao Reach RS4/RS4 Pro.
-
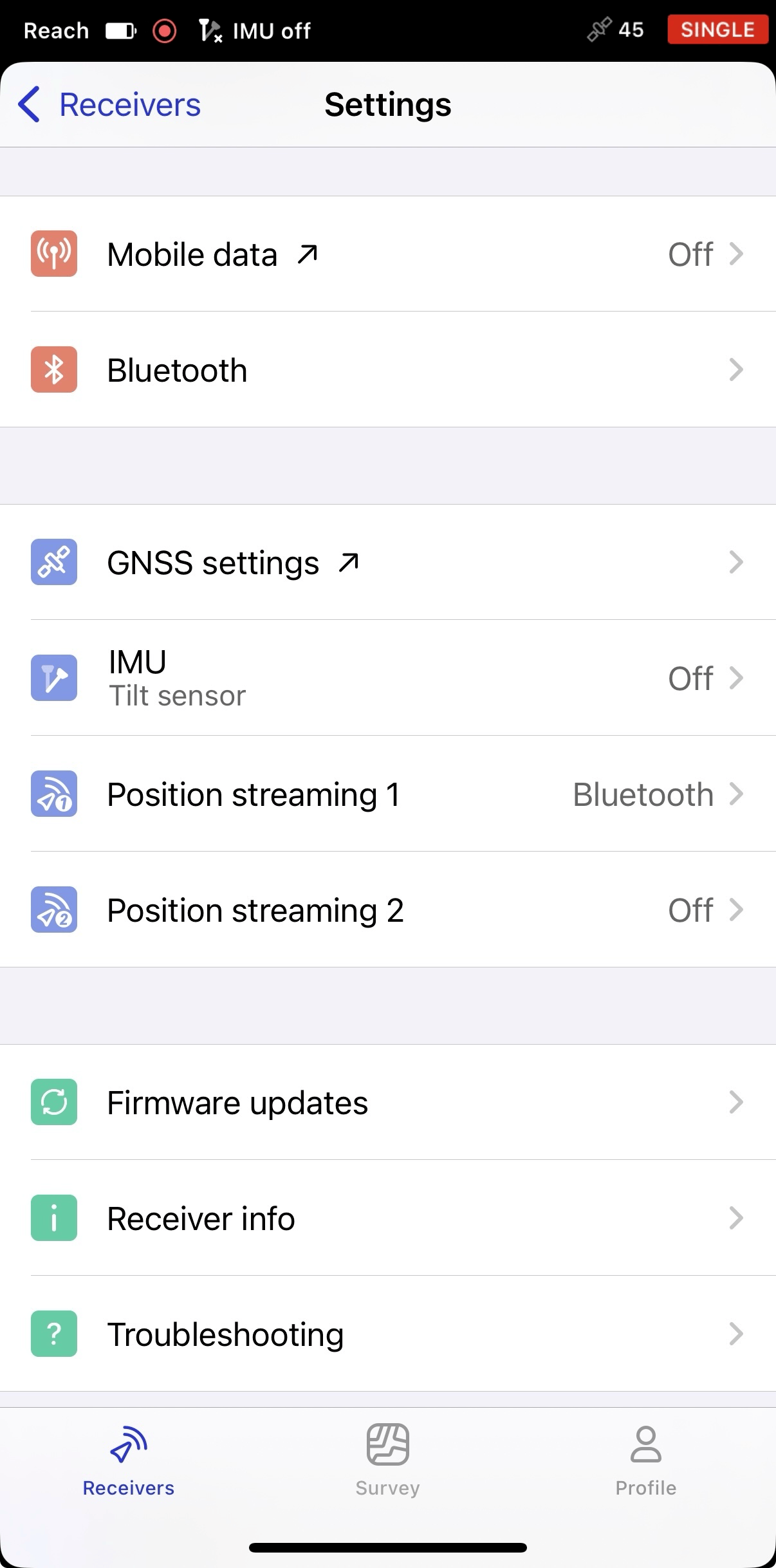
Vá para Configurações e toque em Configurações GNSS.
-
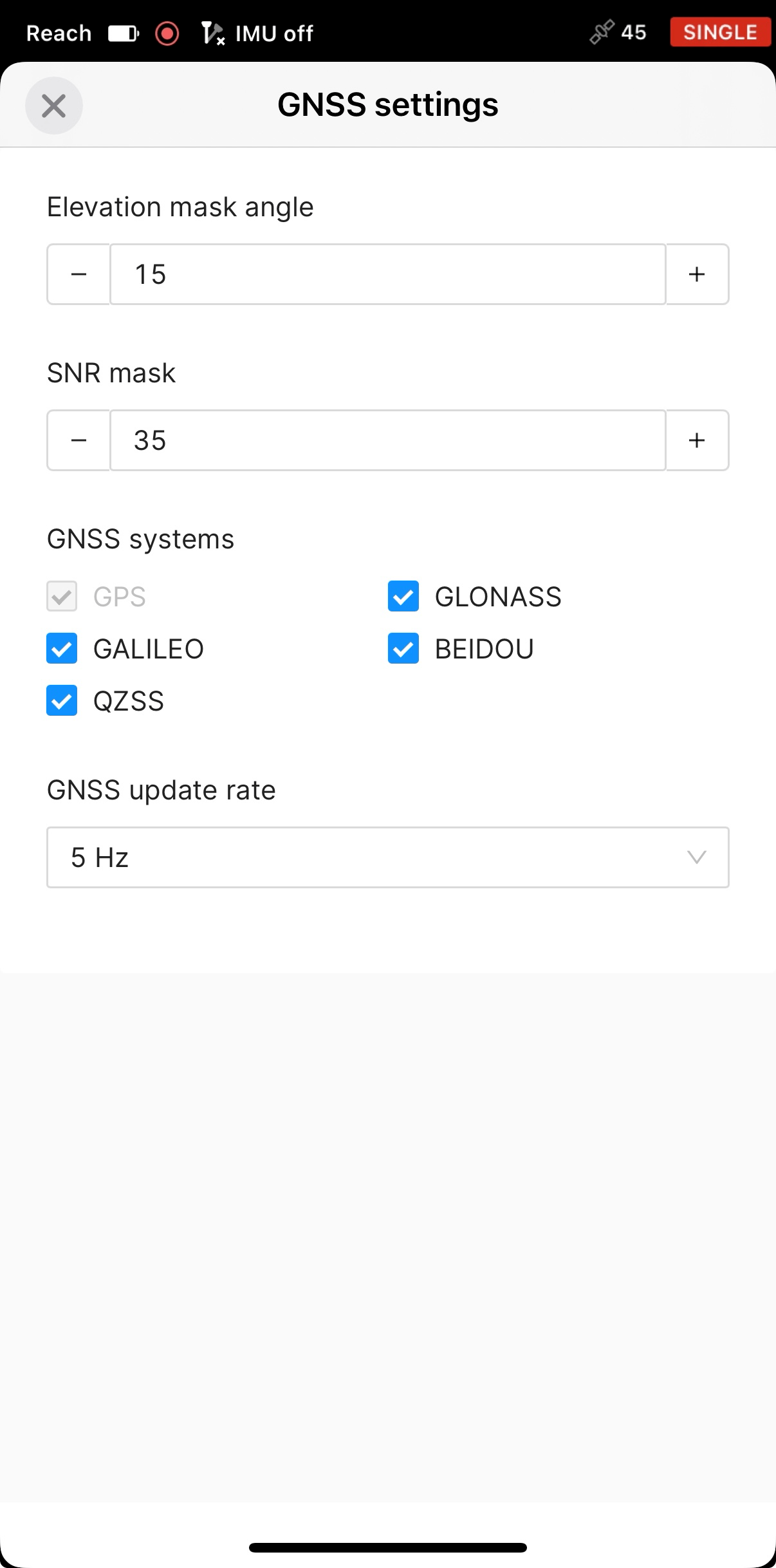
Selecione os sistemas GNSS necessários e defina a taxa de atualização do GNSS de 5 Hz. Aplicar alterações.
-
Para configurar o rover para receber as correções, volte à tela Receptores e toque em Entrada de correção.
-
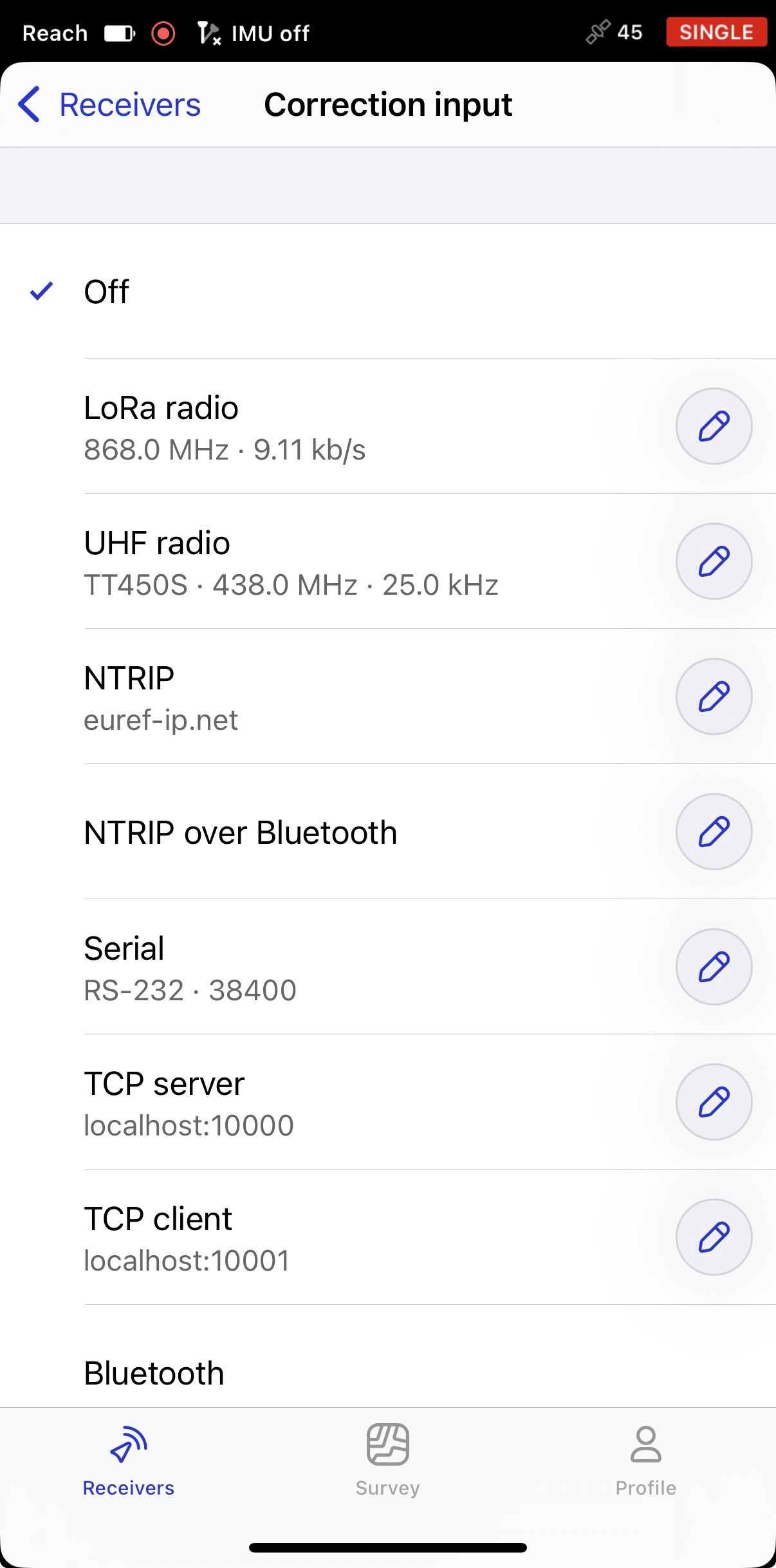
Na célula UHF, toque no botão Editar. Defina a mesma frequência e largura de banda da base. A taxa de dados mudará automaticamente de acordo com a largura de banda escolhida: para 25kHz, é 9600 bit/s, para 12,5-4800 bit/s. Toque em Salvar.
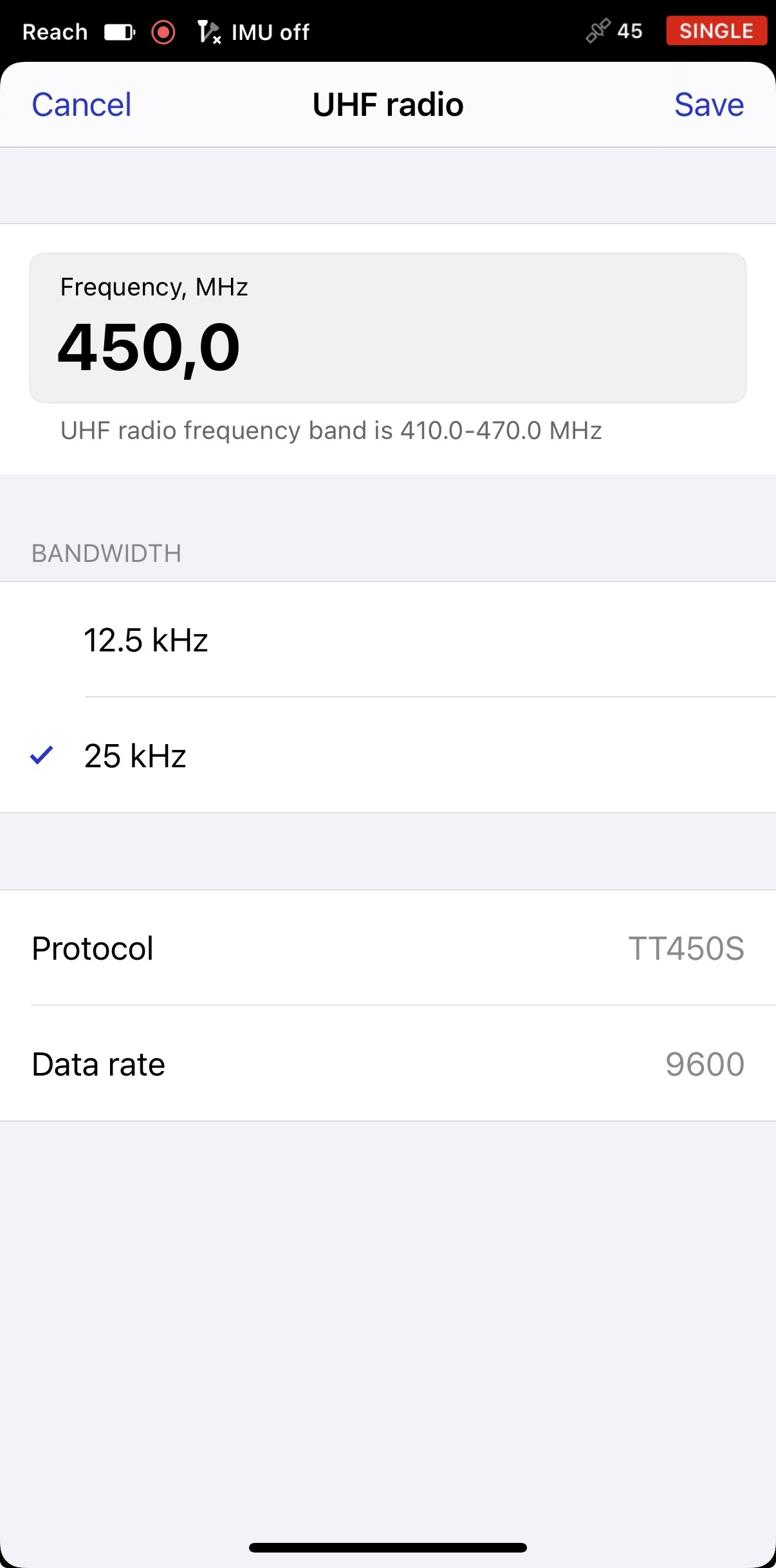 nota
notaA banda de radiofrequência UHF é de 410,0 a 475,0 MHz. O protocolo usado é o TRIMTALK450S*.
Para ter certeza de que as correções estão sendo transmitidas da base para o rover, você pode conectar antenas UHF e colocar os dois receptores perto da janela por alguns minutos para ter uma visão clara do céu. Em seguida, abra o Emlid Flow, conecte-se ao rover e vá para a tela Status. Role para baixo até a seção Correções e verifique se o rover está recebendo correções.
Colocar unidades
Quando tiver configurado as definições na base e no rover, você estará pronto para sair para colocar a base e concluir o processo de configuração. Para os trabalhos de campo, você vai precisar de um tripé e de um bastão topográfico. Para colocar as unidades, siga os passos abaixo:
Antes de colocar a base, certifique-se de que você se encontra numa área aberta com uma vista desimpedida do céu. Isto vai garantir uma boa recepção do sinal e um número razoável de satélites disponíveis.
-
Monte sua base no tripé e nivele-o com precisão.
-
Coloque o rover no bastão.
-
Conecte as antenas UHF em ambas as unidades.
-
Ligue os receptores.
-
Conclua a configuração da base.
notaConsulte a documentação do fabricante da base para obter detalhes sobre o método de entrada de coordenadas da base e como especificar a posição da base.
Ver resultados
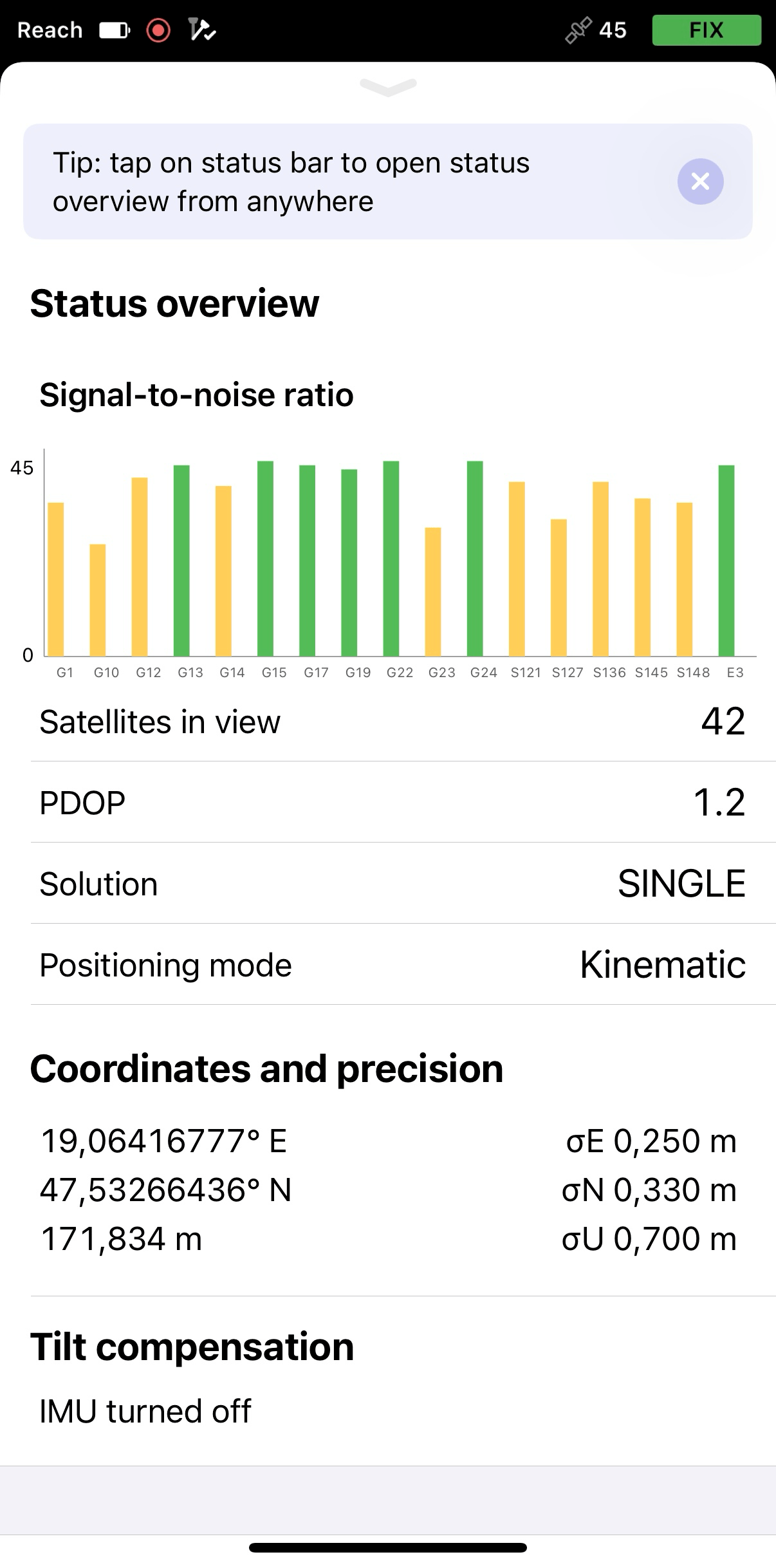
Ao concluir a configuração do RTK por rádio UHF, você poderá ver o status atual da solução no canto superior direito do aplicativo Emlid Flow:
-
SINGLE significa que o rover encontrou uma solução que depende de seu próprio receptor e que as correções de base não são aplicadas. A precisão em modo standalone situa-se geralmente no nível de vários metros.
-
FLOAT significa que o rover recebe correções da base, mas não consegue resolver todas as ambiguidades e, nesse caso, a precisão geralmente está em nível abaixo de um metro.
-
FIX significa que o rover, usando as correções da base, resolveu as ambiguidades em seu cálculo posicional e obteve a solução com precisão de centímetro.
Após um curto período de tempo, o rover obtém uma solução fixa. Em bons ambientes, demorará alguns segundos para obter uma solução de fixação. Em condições difíceis, pode demorar um pouco mais. Assim que o rover receber o FIX, estará tudo pronto para o levantamento topográfico.
Você também pode encontrar o status atual da solução e sua posição em tempo real na tela Status.
Quando você aprender a configurar o RTK por rádio UHF, poderá verificar como trabalhar com a compensação de inclinação no seu rover Reach RS4/RS4 Pro no guia Como ativar a compensação de inclinação no rover.
Ler mais
- Como criar ou importar um projeto
- Como coletar pontos
- Como coletar linhas
- Como fazer a locação de pontos
- Como fazer locação de linhas
- Como exportar projetos
*marca registrada da Trimble Inc.