Comment travailler avec une base tierce sur radio UHF
Ce guide explique comment configurer votre Reach RS4/RS4 Pro pour travailler avec une base tierce sur radio UHF.
Vue d'ensemble
Vous pouvez configurer votre Reach RS4 ou Reach RS4 Pro en tant que rover pour travailler avec une base tierce sur radio UHF.
Les Reach RS4 et Reach RS4 Pro disposent d'une radio UHF intégrée qui fonctionne dans la bande 410 - 470 MHz, offre une puissance de sortie allant jusqu'à 2 W et utilise le protocole Trimtalk 450S*, avec des limites régionales appliquées conformément aux réglementations locales. Le Reach RS4 peut à la fois transmettre et recevoir des corrections RTK via UHF. Dans la plupart des régions, la série RS4 est livrée avec des plans de canaux et des limites de puissance spécifiques à la région préconfigurés dans Emlid Flow pour assurer une exploitation conforme. Selon votre juridiction, l'utilisation de la radio UHF peut encore nécessiter une licence.
Pour configurer la communication par radio UHF, utilisez l'antenne UHF fournie.
*Marque déposée de Trimble Inc.
Configurer votre base tierce
Configurez les paramètres RTK et la communication radio UHF sur votre base tierce. Les détails de configuration dépendent du modèle de base que vous utilisez.
Pour configurer correctement votre base tierce, suivez les instructions du fabricant.
Configurer votre rover Reach RS4 / RS4 Pro
Pour configurer votre rover, suivez les étapes ci-dessous :
-
Ouvrez l'application Emlid Flow et connectez-vous à Reach RS4/RS4 Pro.
-
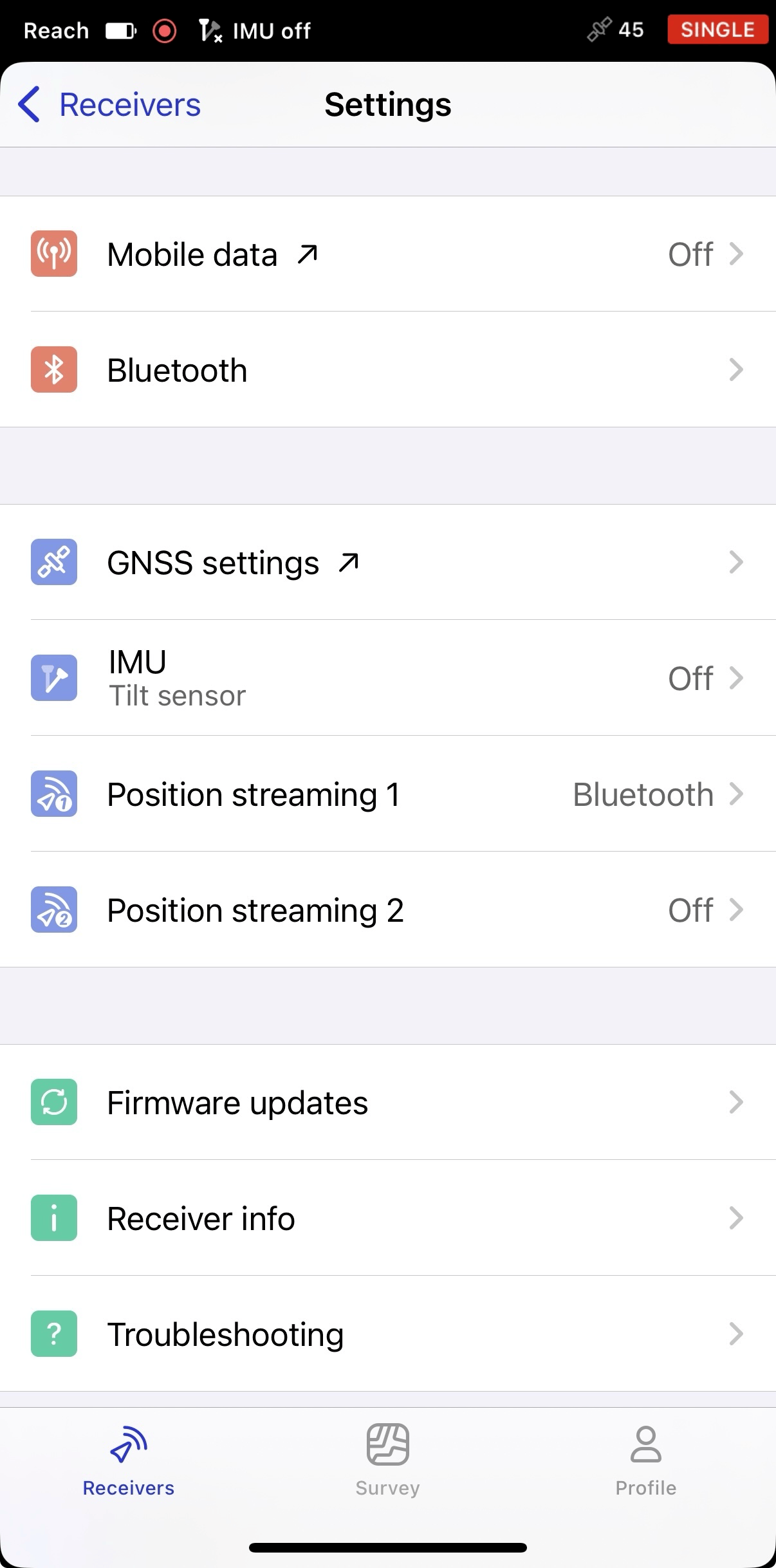
Allez dans Settings (Paramètres), appuyez sur GNSS settings (Paramètres GNSS).
-
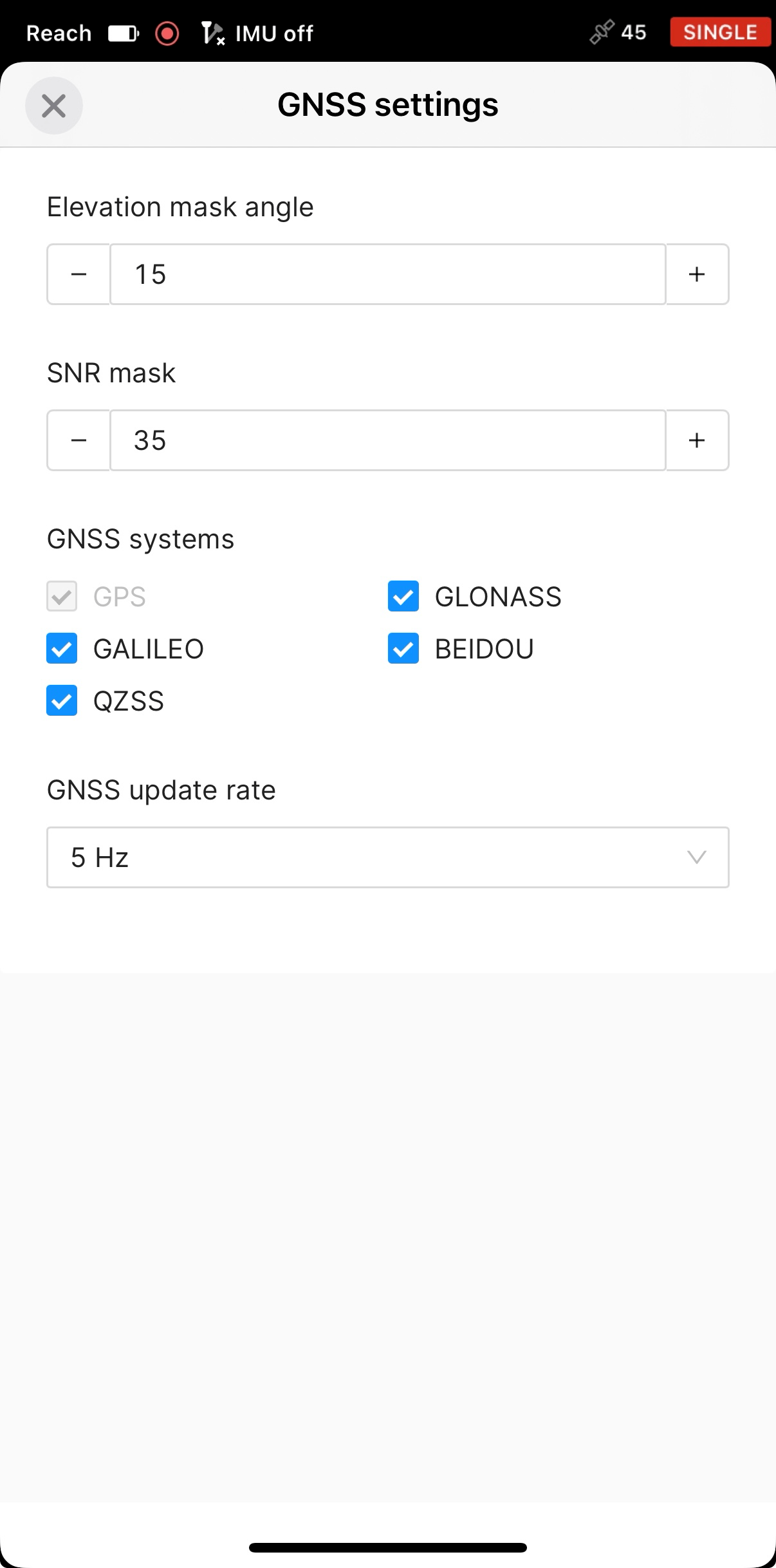
Sélectionnez les systèmes GNSS nécessaires et définissez une fréquence de mise à jour GNSS de 5 Hz. Appliquer les modifications.
-
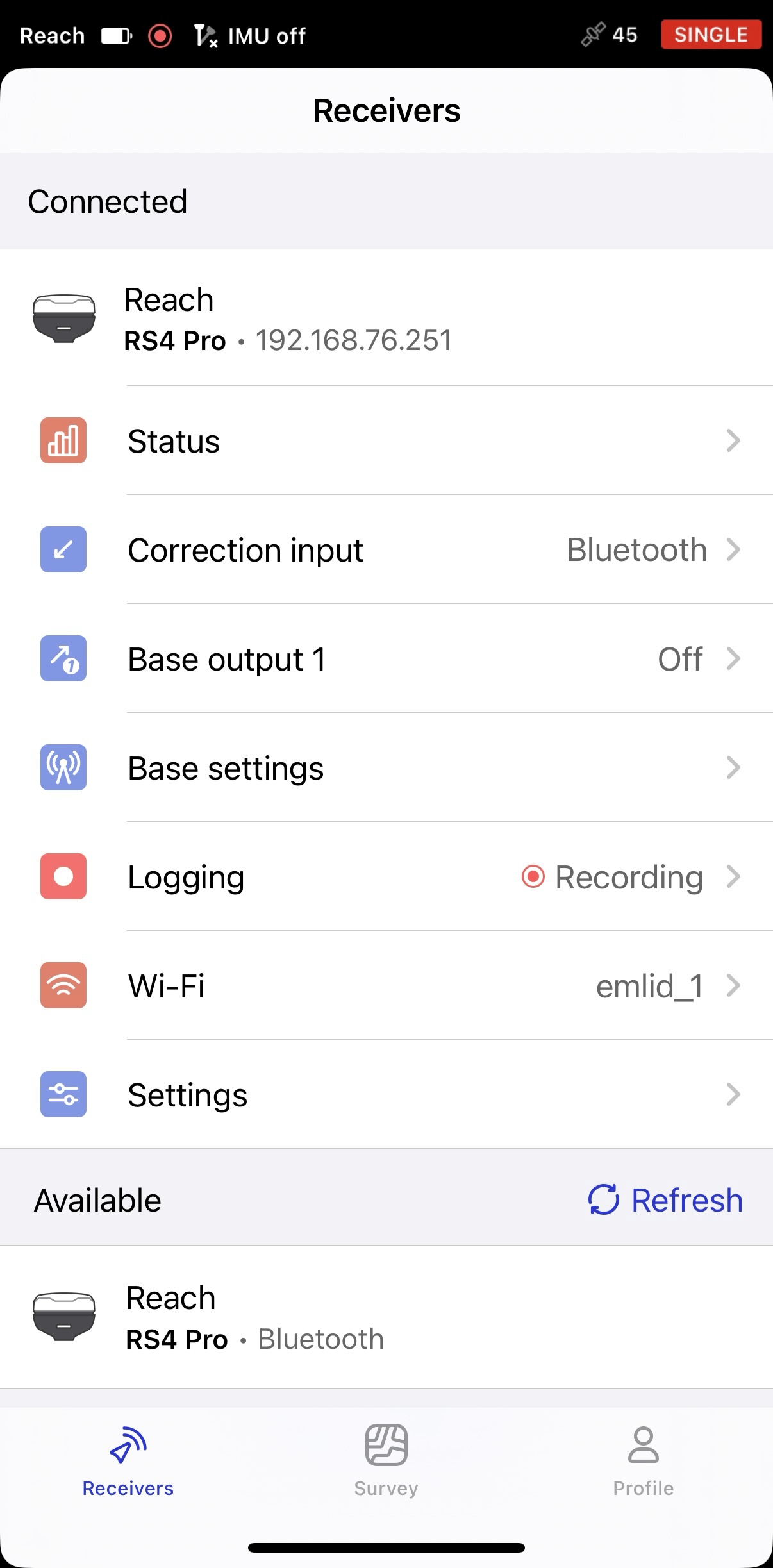
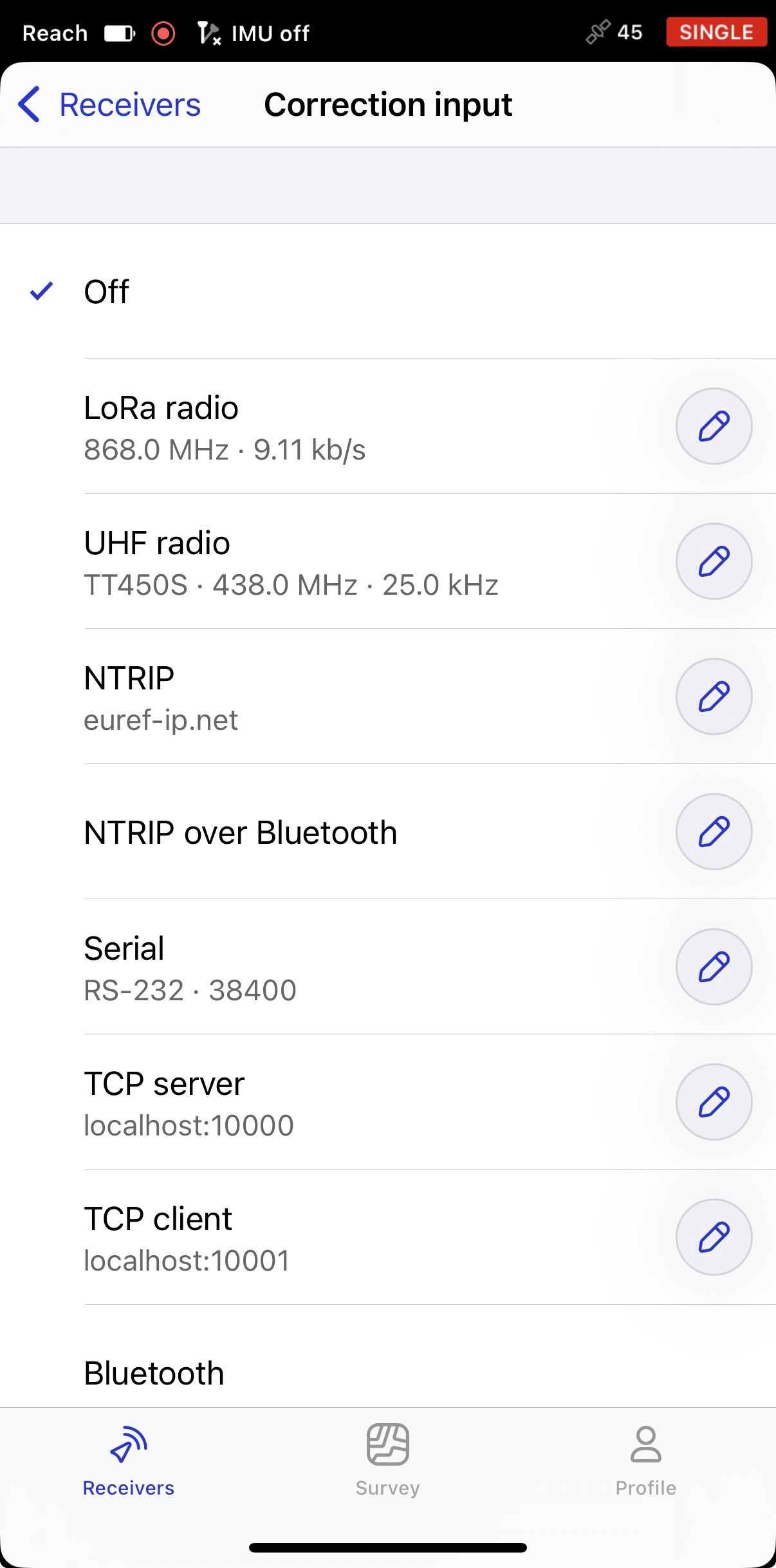
Pour configurer votre rover afin de recevoir les corrections, retournez à l'écran Receivers (Récepteurs) et appuyez sur Correction input (Entrée de correction).
-
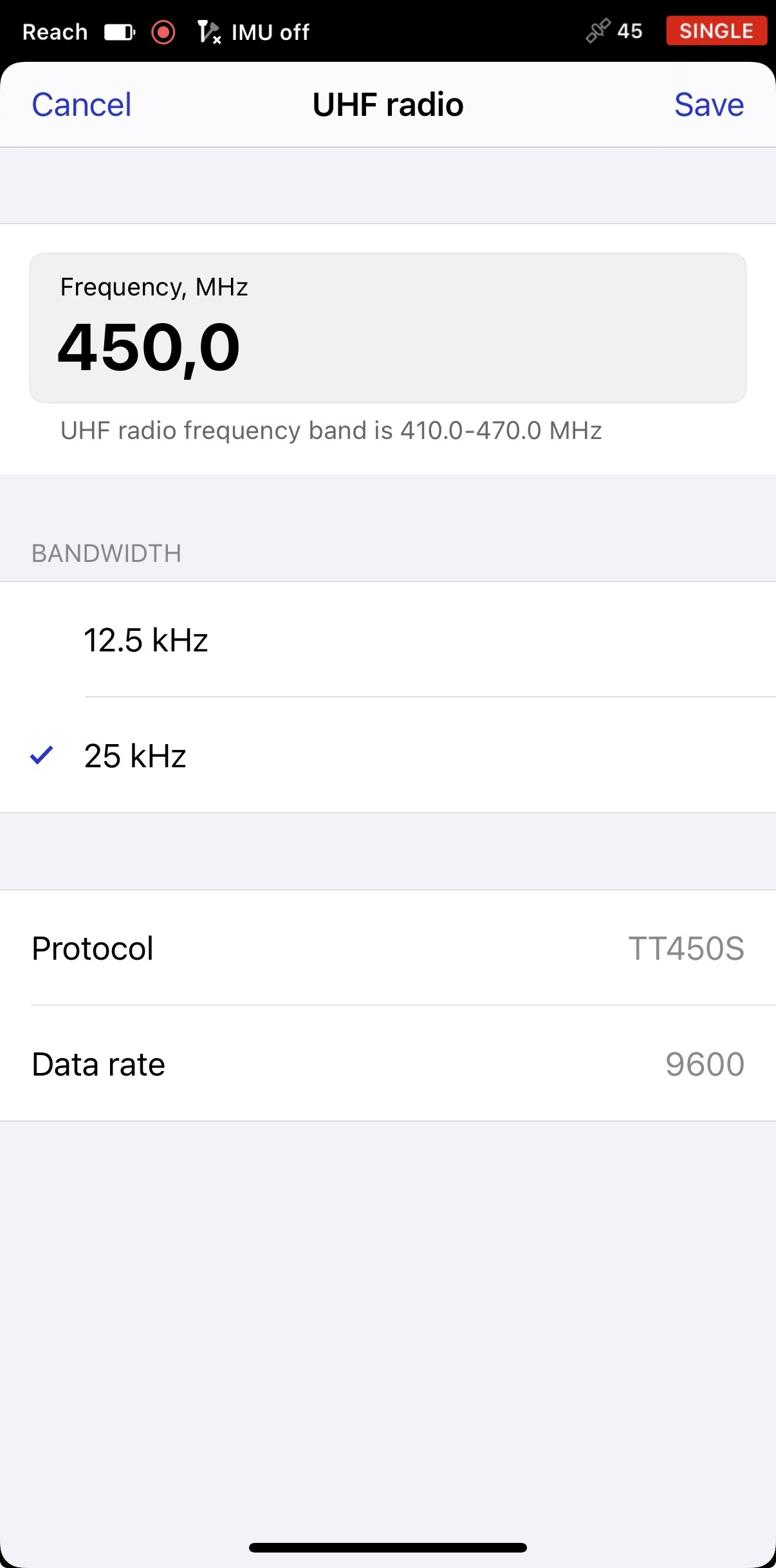
Dans la cellule UHF, appuyez sur le bouton Edit (Modifier). Définissez la même fréquence et la même largeur de bande que pour la base. Le débit binaire changera automatiquement en fonction de la largeur de bande choisie : pour 25kHz, il est de 9600 bit/s, pour 12,5—4800 bit/s. Appuyez sur Save (Enregistrer).
 remarque
remarqueLa bande de fréquences radio UHF est de 410,0 - 475,0 MHz. Le protocole utilisé est TRIMTALK450S*.
Pour vous assurer que les corrections passent de la base au rover, vous pouvez attacher des antennes UHF et placer les deux récepteurs près de la fenêtre pendant quelques minutes pour avoir une vue dégagée du ciel. Ensuite, ouvrez Emlid Flow, connectez-vous au rover et allez à l'écran Status (Statut). Faites défiler vers le bas jusqu'à la section Corrections et assurez-vous que votre rover reçoit des corrections.
Placer les unités
Lorsque vous avez configuré les paramètres sur la base et le rover, vous êtes prêt à sortir pour placer la base et terminer le processus de configuration. Pour les travaux sur le terrain, vous aurez besoin d'un trépied et d'une perche de nivellement. Pour placer les unités, suivez les étapes ci-dessous :
Avant de placer la base, assurez-vous d'être dans une zone ouverte avec une vue dégagée du ciel. Cela garantira une bonne réception du signal et un nombre correct de satellites disponibles.
-
Montez votre base sur le trépied et nivelez précisément le trépied.
-
Mettez le rover sur la perche.
-
Fixez les antennes UHF aux deux unités.
-
Allumez les récepteurs.
-
Terminez la configuration de la base.
remarqueConsultez la documentation du fabricant de votre base pour plus de détails sur la méthode d'entrée des coordonnées et sur la manière de spécifier la position de base.
Voir les résultats
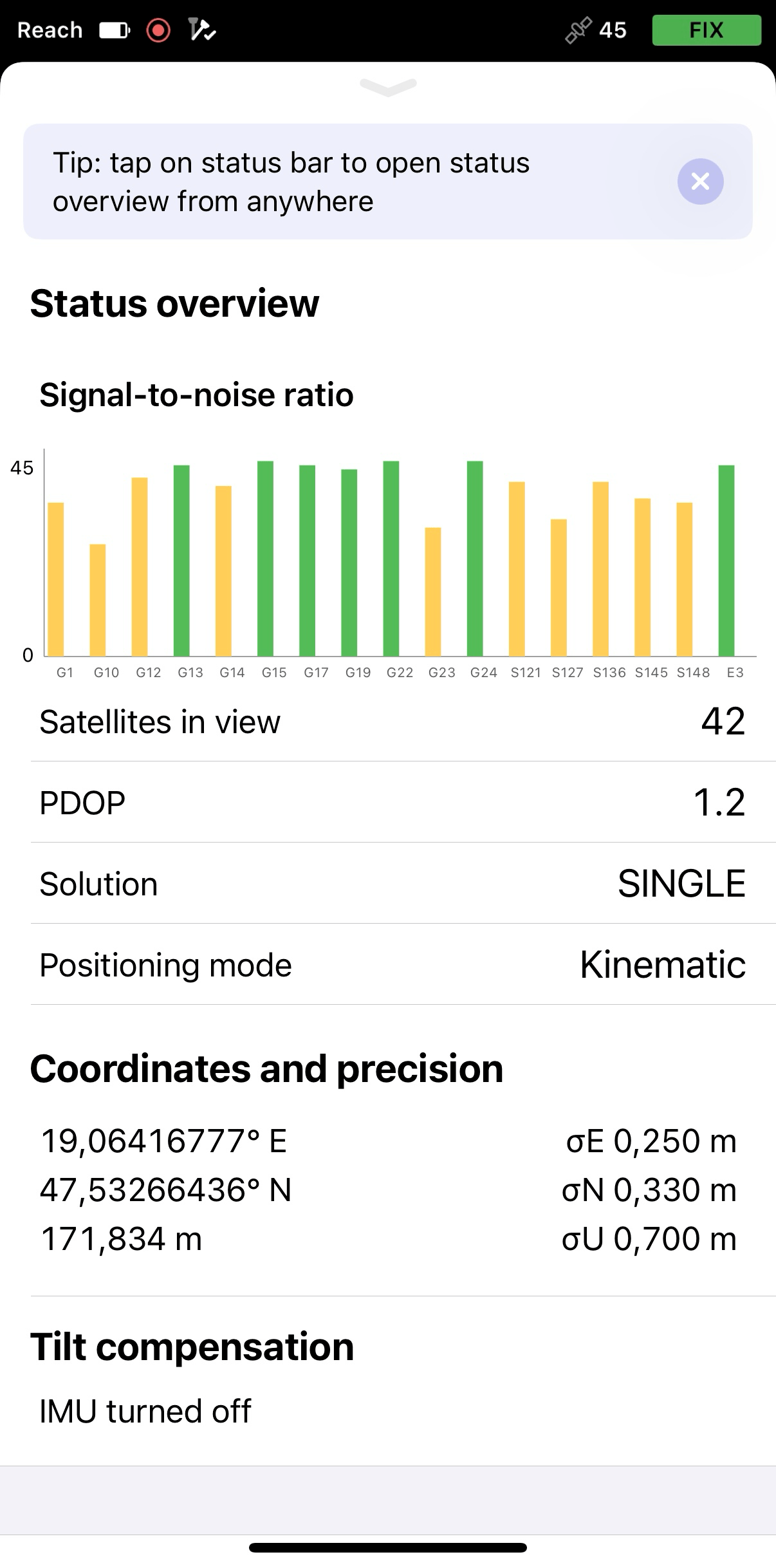
Lorsque vous avez terminé votre mise en place RTK sur la radio UHF, vous pouvez voir l'état actuel de la solution dans le coin supérieur droit de l'application Emlid Flow :
-
SINGLE signifie que le rover a trouvé une solution en s'appuyant sur son propre récepteur et que les corrections de la base ne sont pas appliquées. La précision en mode autonome est généralement de l'ordre de plusieurs mètres.
-
FLOAT signifie que le rover reçoit des corrections de la base mais ne peut pas résoudre toutes les ambiguïtés, et dans ce cas, la précision est généralement de l'ordre de moins d'un mètre.
-
FIX signifie que le rover utilisant les corrections de la base a résolu les ambiguïtés dans son calcul de position et a atteint une solution avec une précision au niveau centimétrique.
Après une courte période, le rover obtient une solution fixe. Dans de bons environnements, il faudra quelques secondes pour obtenir une solution fixe. Dans des conditions difficiles, cela peut prendre un peu plus de temps. Une fois que le rover obtient FIX, vous êtes prêt pour le nivellement.
Vous pouvez également trouver l'état actuel de la solution ainsi que votre position en temps réel sur l'écran Status (Statut).
Lorsque vous apprenez à configurer le RTK sur radio UHF, vous pouvez découvrir comment travailler avec la compensation d'inclinaison sur votre Reach RS4/RS4 Pro rover dans le guide Comment activer la compensation d'inclinaison sur le rover.
Lectures complémentaires
- Comment créer ou importer un projet
- Comment collecter des points
- Comment collecter des lignes
- Comment implanter des points
- Comment implanter des lignes
- Comment exporter des projets
*marque déposée de Trimble Inc.