Come lavorare con una base di terze parti tramite radio UHF
Questa guida spiega come configurare il Reach RS4/RS4 Pro per funzionare con una base di terze parti tramite radio UHF.
Panoramica
È possibile configurare Reach RS4 o Reach RS4 Pro come rover per operare con una base di terze parti tramite radio UHF.
Reach RS4 e Reach RS4 Pro dispongono di una radio UHF integrata che opera nella banda 410–470 MHz, fornisce una potenza di uscita fino a 2 W e funziona utilizzando il protocollo Trimtalk 450S*, con limiti regionali applicati in base alle normative locali. Reach RS4 può sia trasmettere che ricevere correzioni RTK via UHF. Nella maggior parte delle regioni, la serie RS4 viene spedita con piani di canali e limiti di potenza specifici per la regione preconfigurati in Emlid Flow per supportare il funzionamento conforme. A seconda della giurisdizione, il funzionamento UHF potrebbe richiedere una licenza.
Per configurare la comunicazione radio UHF, utilizzare l'antenna UHF in dotazione.
*Marchio di fabbrica di Trimble Inc.
Configurare la base di terze parti
Configurare le impostazioni RTK e la comunicazione radio UHF sulla base di terze parti. I dettagli della configurazione dipendono dal modello di base in uso.
Per configurare correttamente la base di terze parti, seguire le istruzioni del produttore.
Configurare il rover Reach RS4 / RS4 Pro
Per configurare il rover, seguire le seguenti fasi:
-
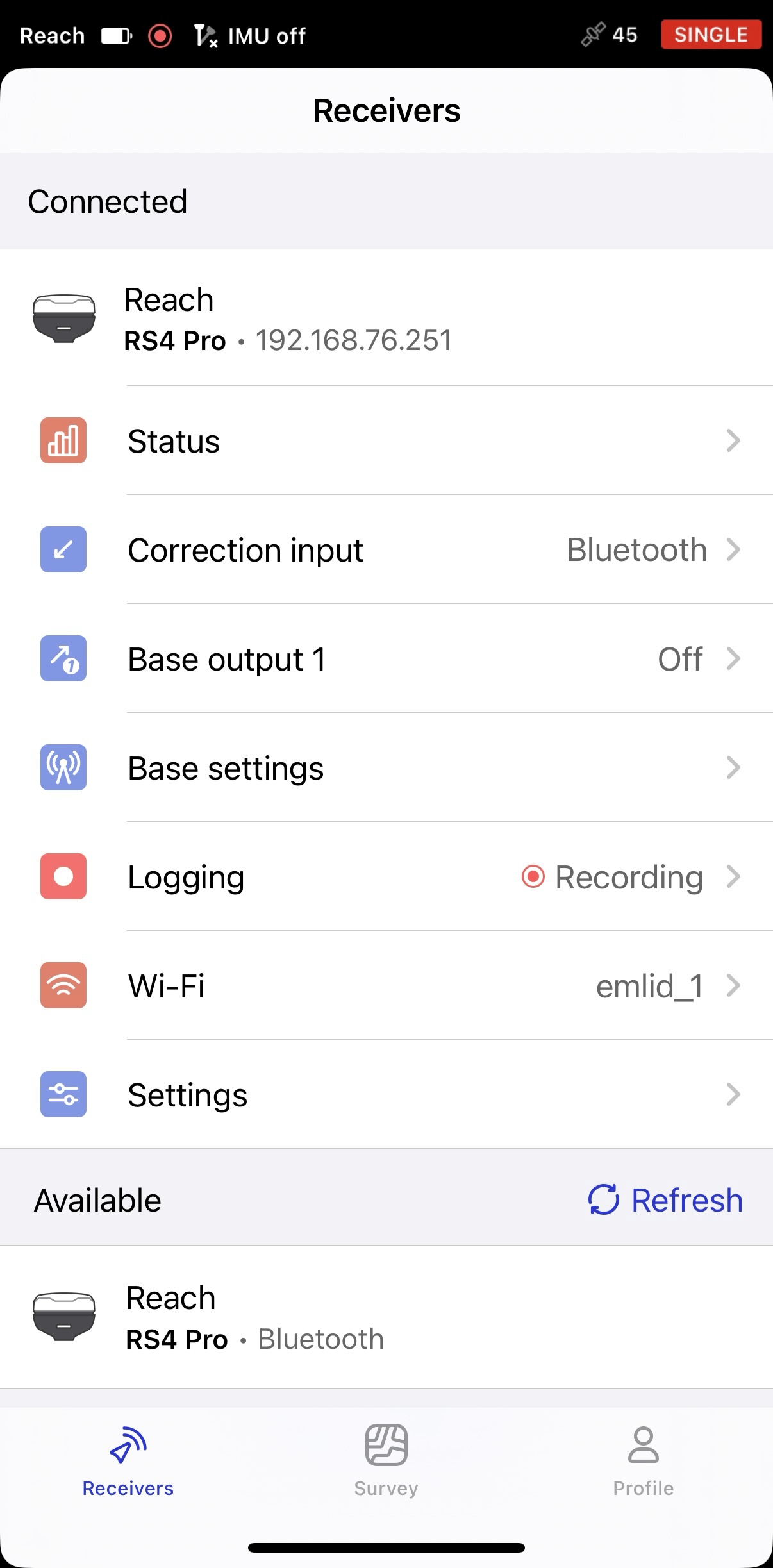
Aprire l'app Emlid Flow e connettersi a Reach RS4 / RS4 Pro.
-
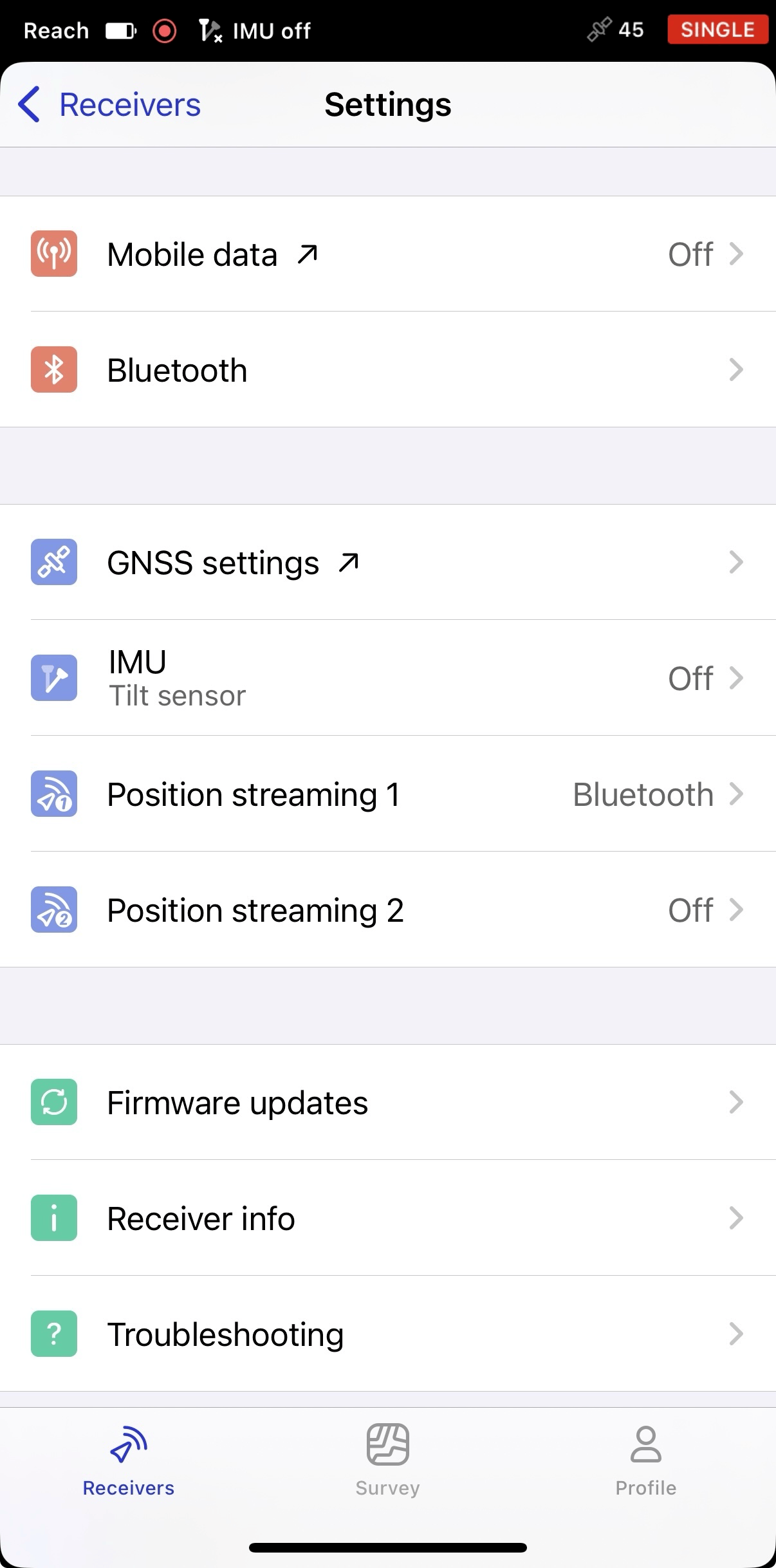
Andare su Settings (Impostazioni) e toccare GNSS settings (Impostazioni GNSS).
-
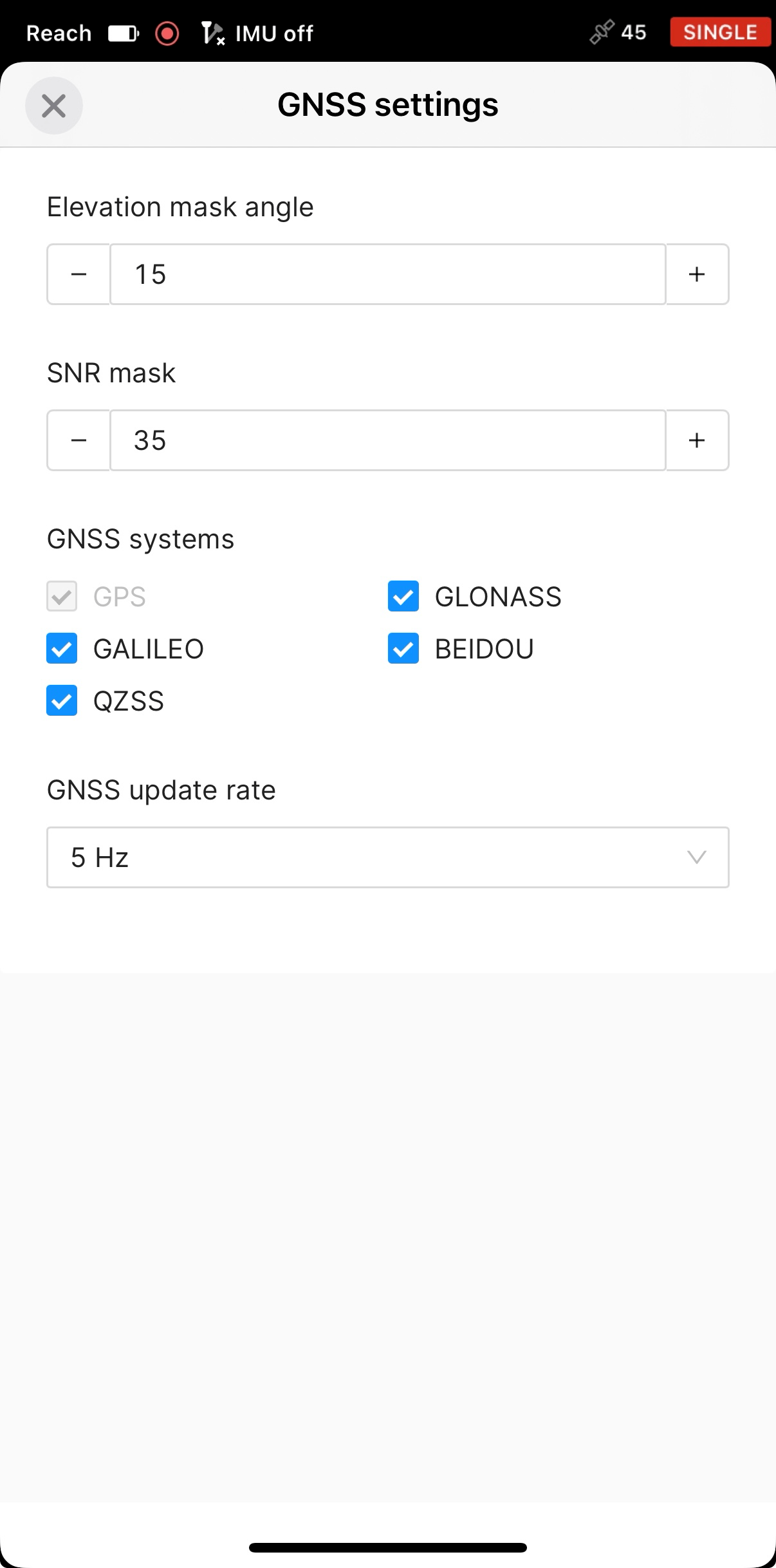
Selezionare i sistemi GNSS necessari e impostare la frequenza di aggiornamento GNSS a 5 Hz. Applicare le modifiche.
-
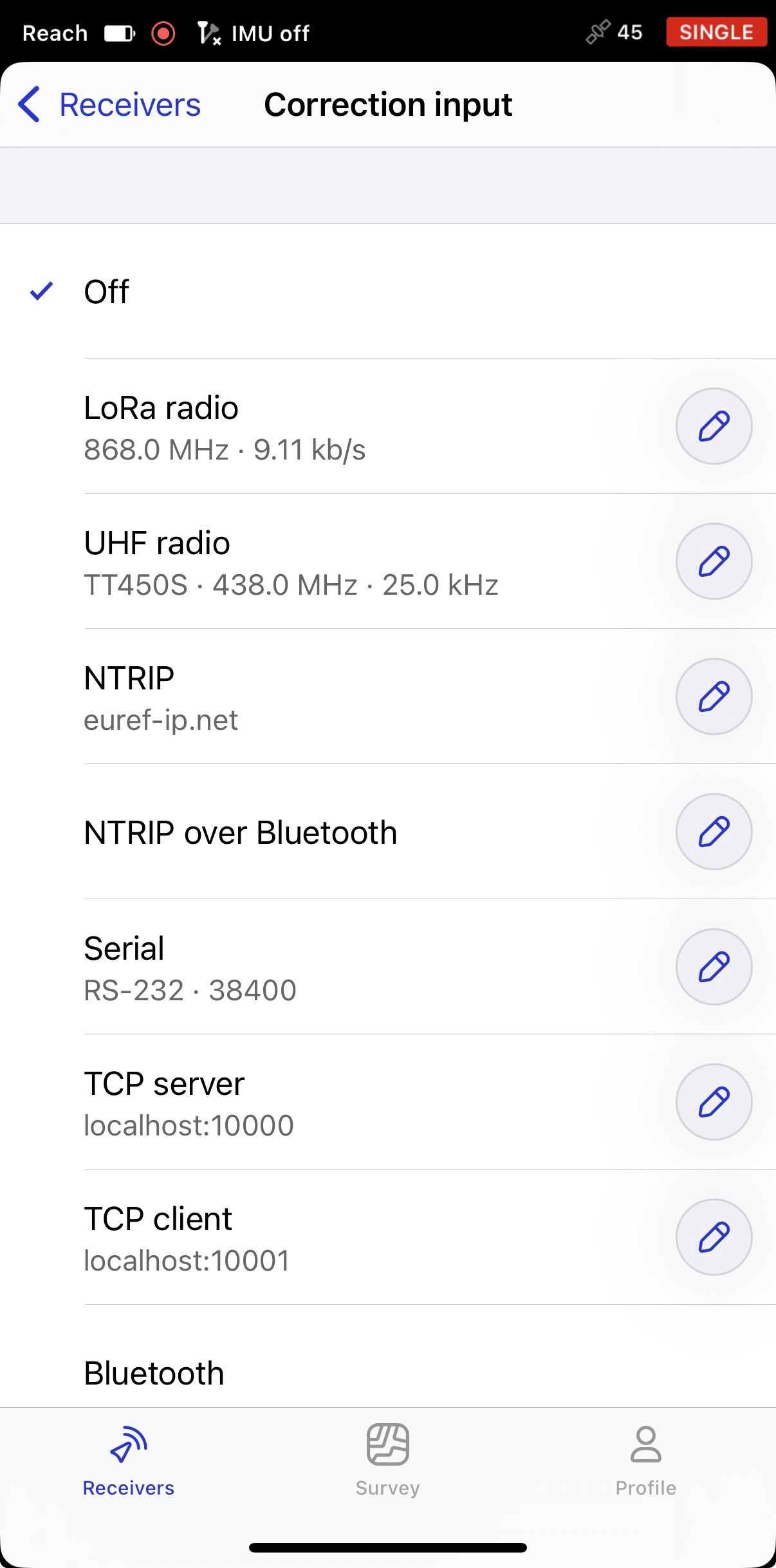
Per configurare il rover per ricevere le correzioni, tornare alla schermata Receivers (Ricevitori) e toccare Correction input (Correzione in ingresso).
-
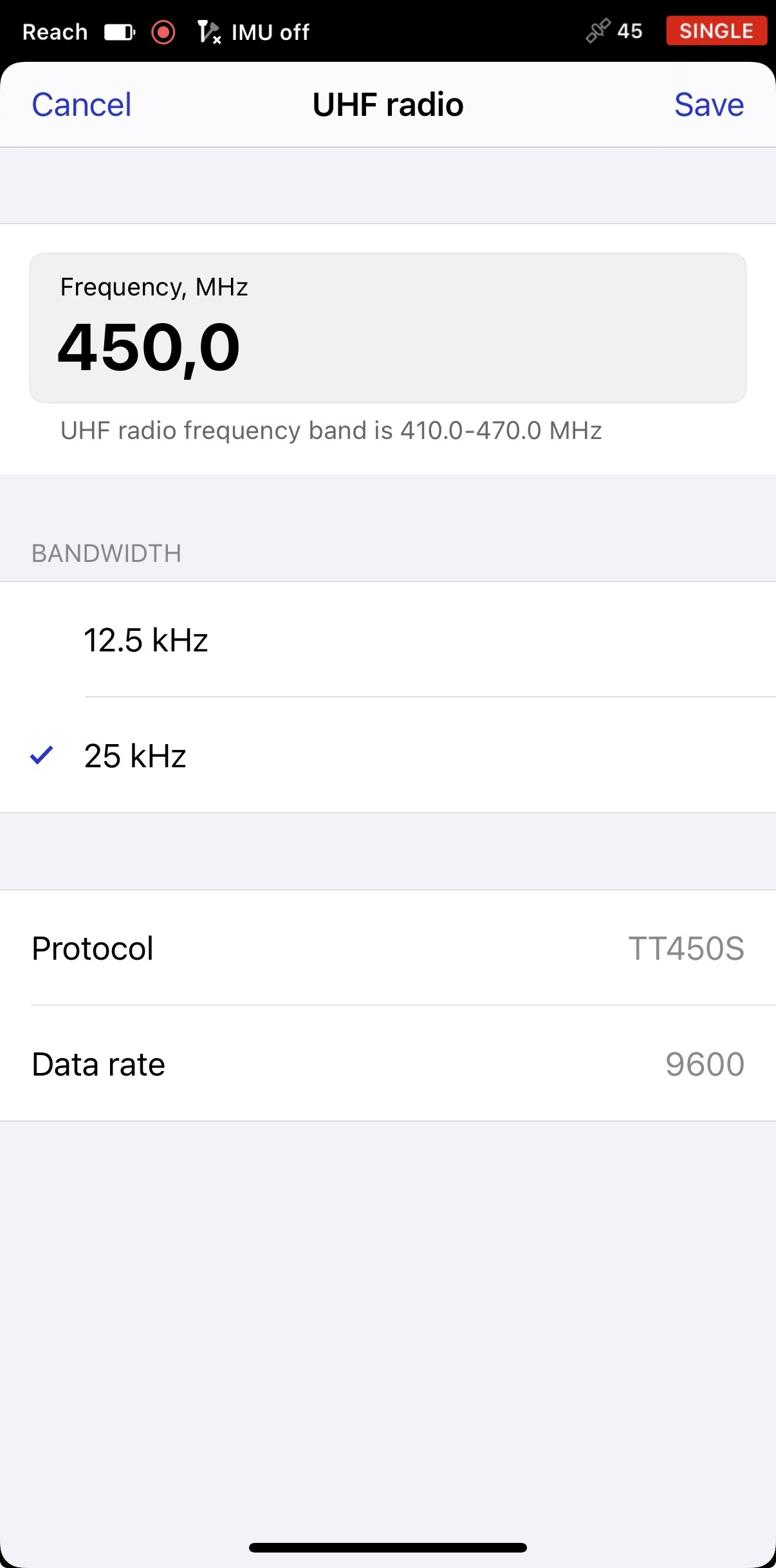
Nella cella UHF, toccare il pulsante Edit (Modifica). Impostare la stessa frequenza e larghezza di banda della base. La velocità dei dati cambierà automaticamente a seconda della larghezza di banda scelta: per 25 kHz, è di 9600 bit/s, per 12,5—4800 bit/s. Toccare Save (Salva).
 note
noteLa banda di frequenza della radio UHF è 410,0 - 475,0 MHz. Il protocollo utilizzato è TRIMTALK450S*.
Per assicurarsi che le correzioni passino dalla base al rover, è possibile collegare le antenne UHF e posizionare entrambi i ricevitori vicino a una finestra per alcuni minuti per ottenere una chiara visuale del cielo. Quindi, aprire Emlid Flow, connettersi al rover e andare alla schermata Status (Stato). Scorrere fino alla sezione Corrections (Correzioni) e assicurarsi che il rover stia ricevendo le correzioni.
Posizionare le unità
Una volta configurate le impostazioni su base e rover, si è pronti per uscire all'esterno, posizionare la base e completare il processo di configurazione. Per i lavori sul campo, saranno necessari un treppiede e una palina topografica. Per posizionare le unità, seguire i passaggi seguenti:
Prima di posizionare la base, assicurarsi di essere in un'area aperta con una chiara visuale del cielo. Ciò garantirà una buona ricezione del segnale e un numero sufficiente di satelliti disponibili.
-
Montare la base sul treppiede e livellare accuratamente il treppiede.
-
Posizionare il rover sulla palina.
-
Collegare le antenne UHF a entrambe le unità.
-
Accendere i ricevitori.
-
Completare la configurazione della base.
noteFare riferimento alla documentazione del produttore della base per dettagli sul metodo di inserimento delle coordinate della base e su come specificare la posizione della base.
Visualizzare i risultati
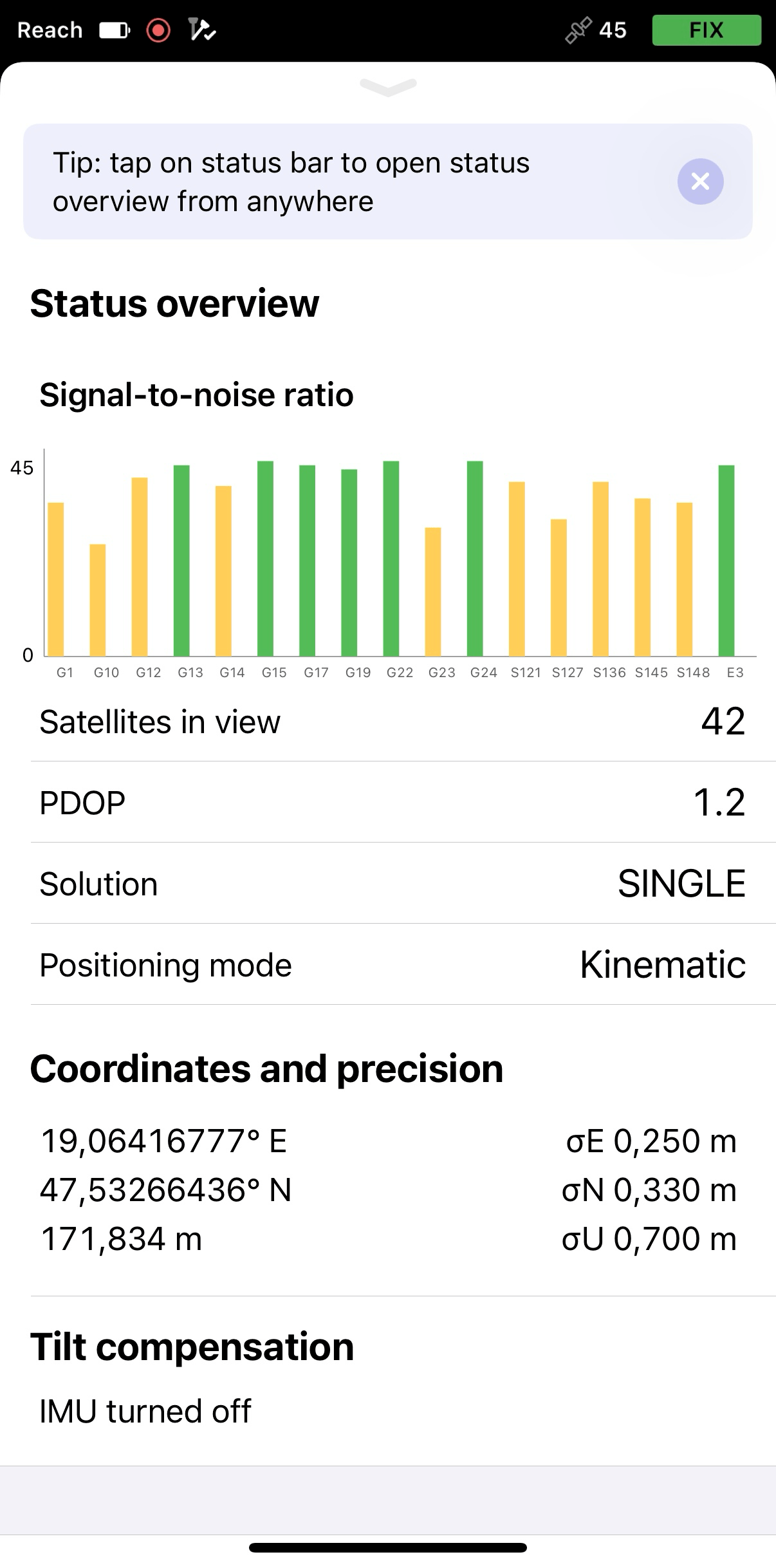
Una volta completata la configurazione RTK via radio UHF, è possibile visualizzare lo stato attuale della soluzione nell'angolo in alto a destra dell'app Emlid Flow:
-
SINGLE significa che il rover ha trovato una soluzione basandosi sul proprio ricevitore e le correzioni della base non vengono applicate. La precisione in modalità autonoma è solitamente a livello di alcuni metri.
-
FLOAT significa che il rover riceve le correzioni dalla base ma non è in grado di risolvere tutte le ambiguità; in questo caso, la precisione è solitamente a livello submetrico.
-
FIX significa che il rover, utilizzando le correzioni della base, ha risolto le ambiguità nel calcolo della sua posizione e ha raggiunto la soluzione con una precisione a livello centimetrico.
Dopo un breve periodo di tempo, il rover ottiene una soluzione fissa. In ambienti favorevoli, ci vorranno alcuni secondi per ottenere una soluzione fissa. In condizioni difficili, potrebbe essere necessario un po' più di tempo. Una volta che il rover ottiene lo stato FIX, si è pronti per il rilievo.
È inoltre possibile trovare lo stato corrente della soluzione e la propria posizione in tempo reale nella schermata Status (Stato).
Una volta appreso come configurare l'RTK via radio UHF, è possibile verificare come lavorare con la compensazione dell'inclinazione sul rover Reach RS4 / RS4 Pro nella guida Come abilitare la compensazione dell'inclinazione sul rover.
Per approfondire
- Come creare o importare un progetto
- Come rilevare i punti
- Come rilevare le linee
- Come picchettare i punti
- Come picchettare le linee
- Come esportare i progetti
*marchio di fabbrica di Trimble Inc.