Arbeiten mit einer Drittanbieter-Basis über UHF-Funkgerät
In dieser Anleitung wird erklärt, wie Sie Ihren Reach RS4/RS4 Pro für den Betrieb mit einer Basisstation eines Drittanbieters über UHF-Funk konfigurieren.
Übersicht
Sie können Ihr Reach RS4 oder Reach RS4 Pro als Rover konfigurieren, um mit einer Basis eines Drittanbieters über UHF-Funk zu arbeiten.
Reach RS4 und Reach RS4 Pro verfügen über ein eingebautes UHF-Funkgerät, das im Frequenzband 410–470 MHz arbeitet, eine Ausgangsleistung von bis zu 2 W bietet und mit dem Trimtalk 450S*-Protokoll arbeitet, wobei regionale Grenzwerte entsprechend den lokalen Vorschriften gelten. Reach RS4 kann RTK-Korrekturen über UHF sowohl senden als auch empfangen. In den meisten Regionen wird die RS4-Serie mit regionsspezifischen Kanalplänen und Leistungsbegrenzungen ausgeliefert, die in Emlid Flow vorkonfiguriert sind, um einen konformen Betrieb zu unterstützen. Je nach Gerichtsbarkeit ist für den UHF-Betrieb weiterhin eine Lizenz erforderlich.
Verwenden Sie zum Einrichten der UHF-Funkverbindung die mitgelieferte UHF-Antenne.
*Warenzeichen von Trimble Inc.
Einrichten einer Drittanbieter-Basis
Konfigurieren Sie die RTK-Einstellungen und die UHF-Funkkommunikation auf Ihrer Basisstation des Drittanbieters. Die Einzelheiten der Einrichtung hängen von dem von Ihnen verwendeten Basismodell ab.
Befolgen Sie die Anweisungen des Herstellers, um die Basis eines Drittanbieters ordnungsgemäß einzurichten.
Richten Sie Ihren Reach RS4 / RS4 Pro Rover ein
Um Ihren Rover einzurichten, folgen Sie den nachstehenden Schritten:
-
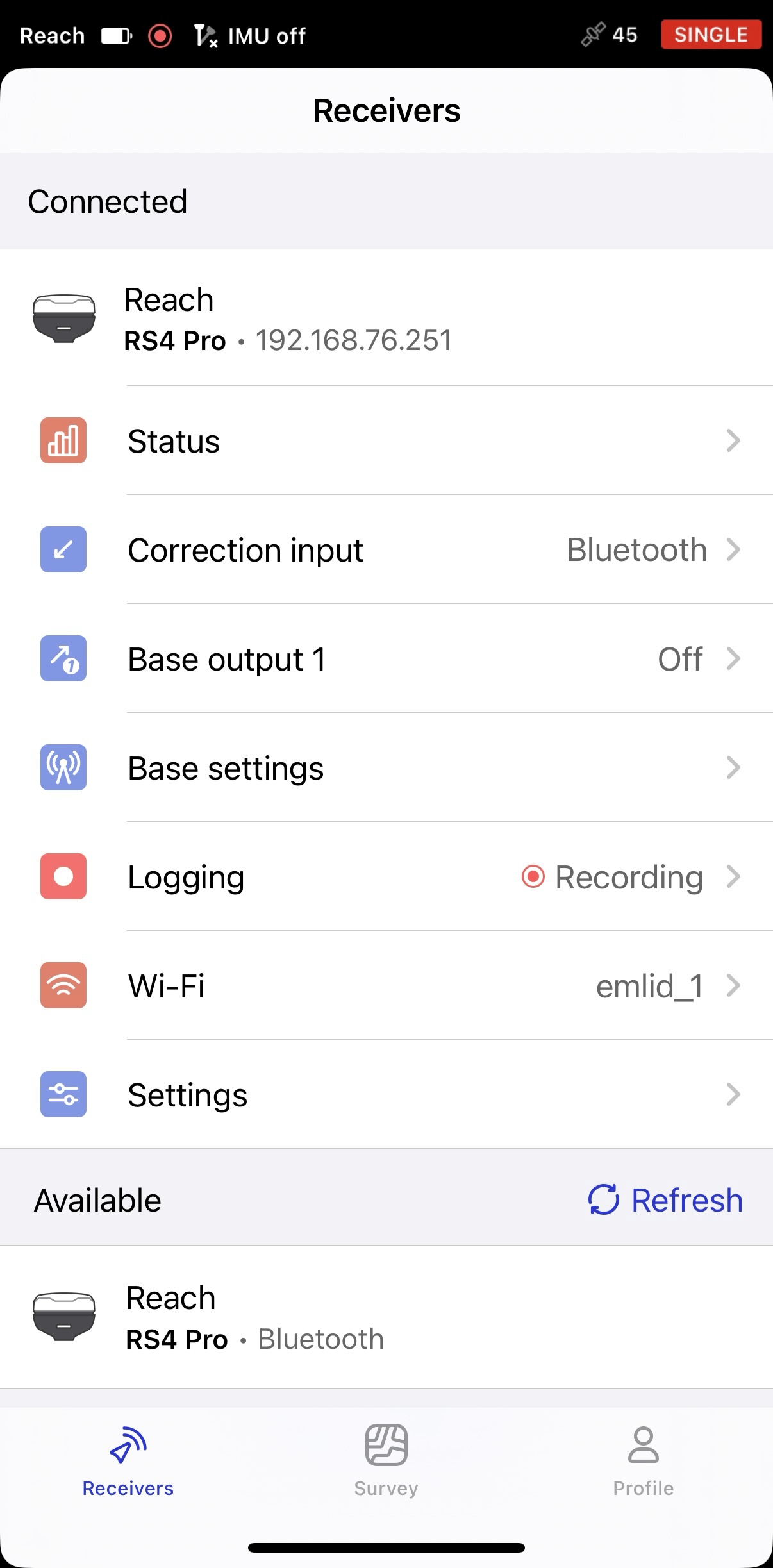
Öffnen Sie die Emlid Flow App und stellen Sie eine Verbindung zum Reach RS4/RS4 Pro her.
-
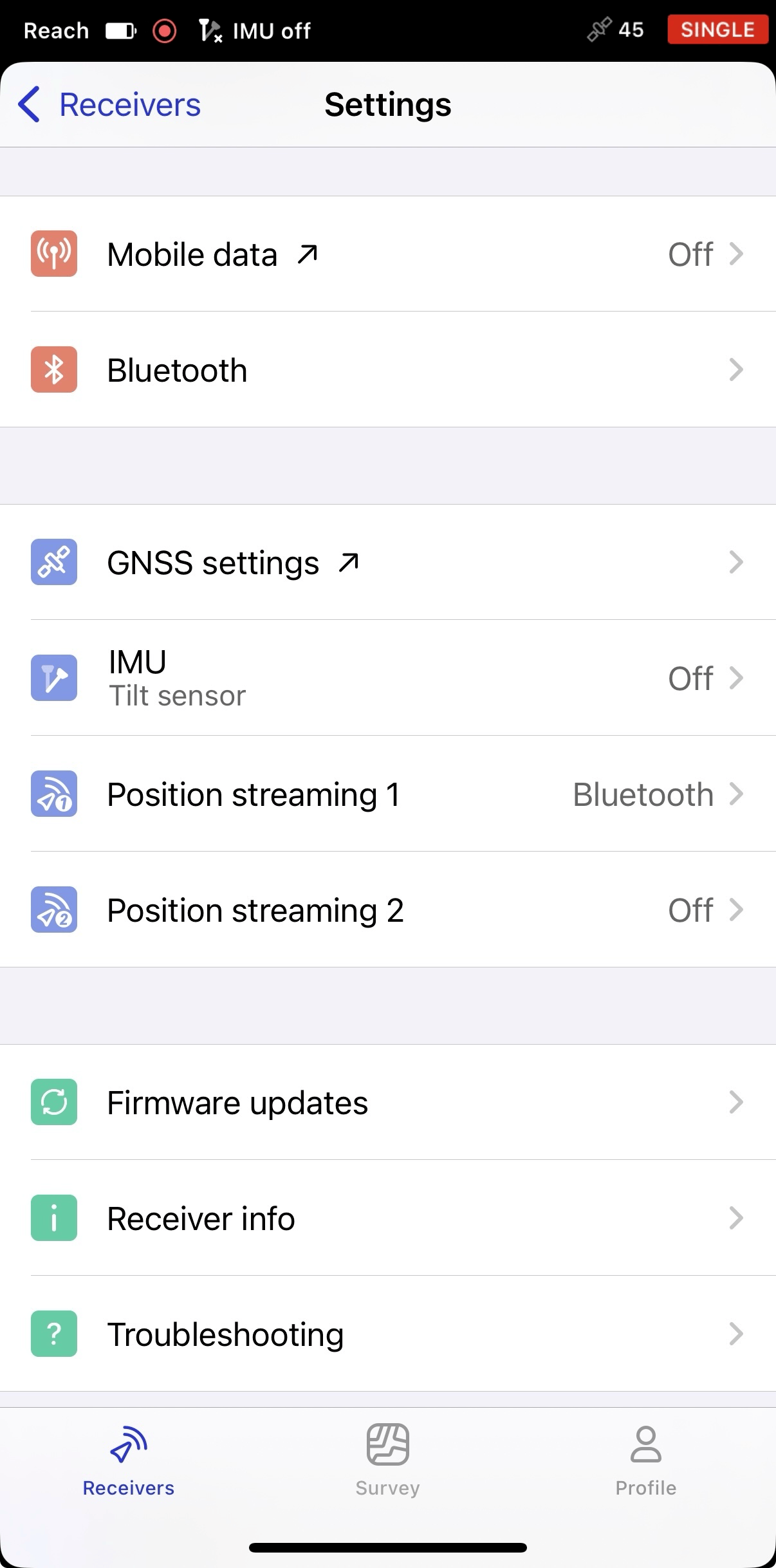
Gehen Sie zu Einstellungen und tippen Sie auf GNSS-Einstellungen.
-
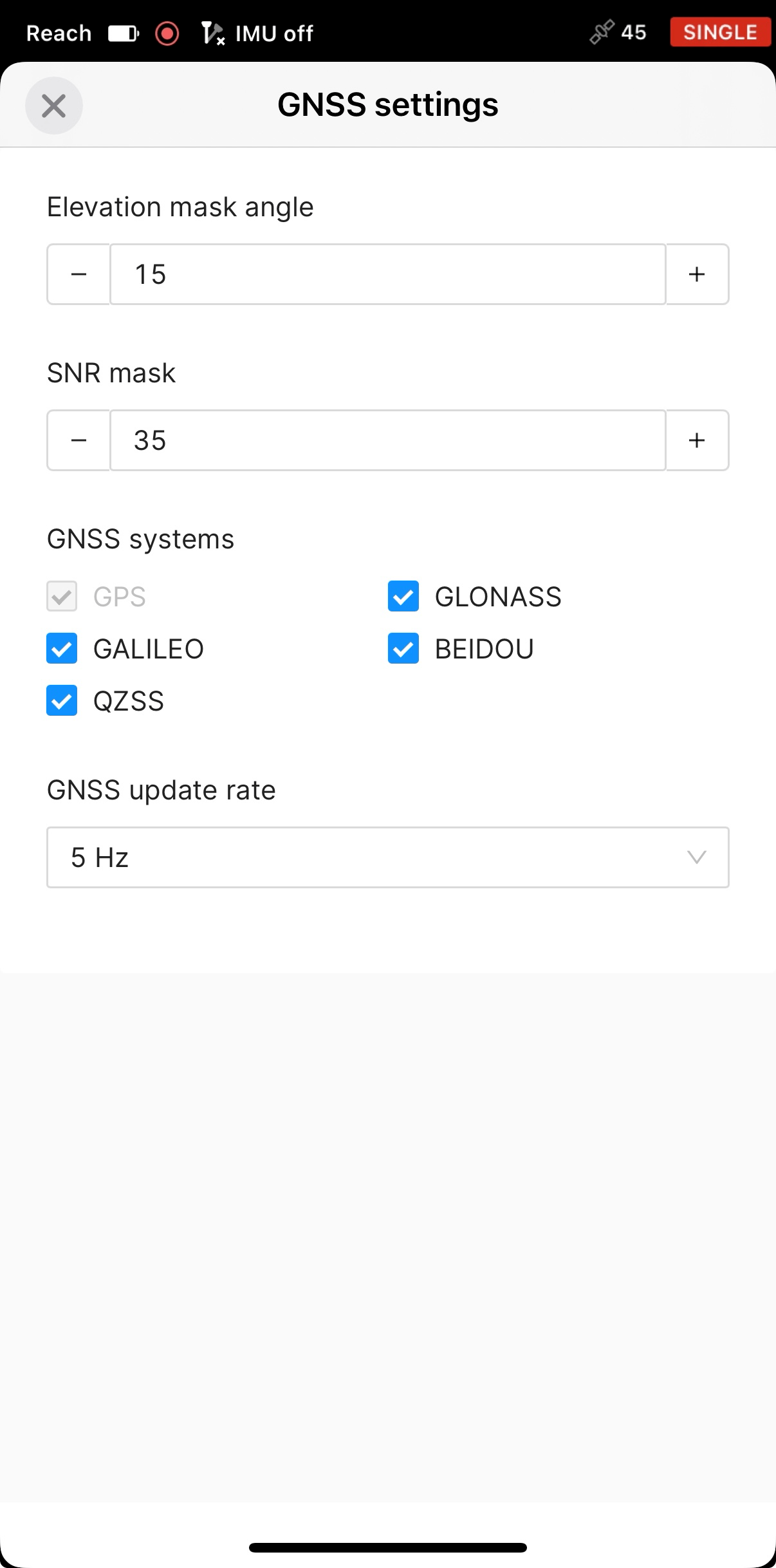
Wählen Sie die benötigten GNSS-Systeme aus und stellen Sie eine GNSS-Aktualisierungsrate von 5 Hz ein. Übernehmen Sie die Änderungen.
-
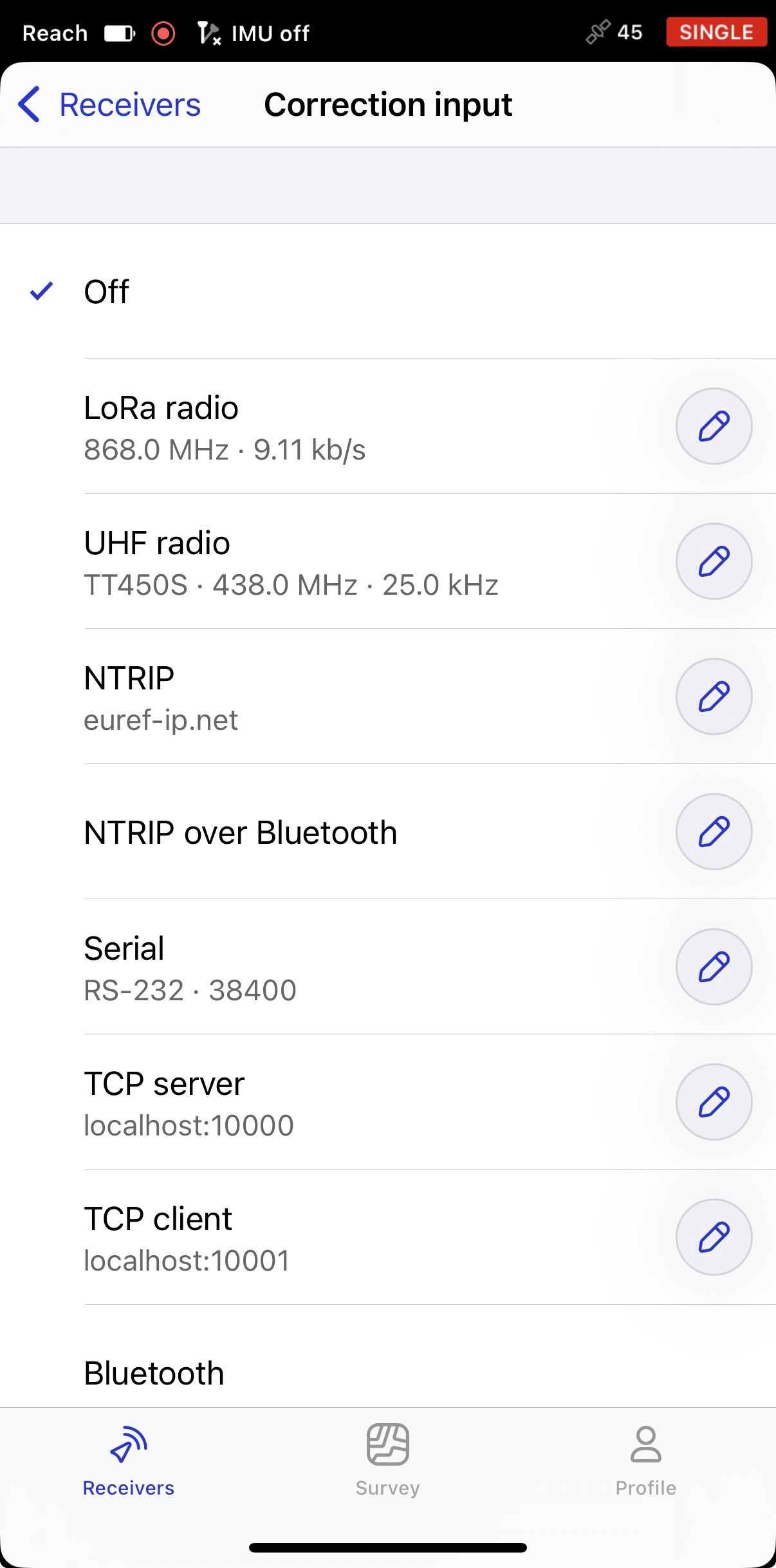
Um Ihren Rover für den Empfang der Korrekturen zu konfigurieren, kehren Sie zum Bildschirm Empfänger zurück und tippen Sie auf Eingabe von Korrekturdaten.
-
Tippen Sie in der Zelle UHF auf die Schaltfläche Bearbeiten. Stellen Sie die gleiche Frequenz und Bandbreite wie für die Basisstation ein. Die Datenrate ändert sich automatisch in Abhängigkeit von der gewählten Bandbreite: bei 25 kHz sind es 9600 Bit/s, bei 12,5-4800 Bit/s. Tippen Sie auf Speichern.
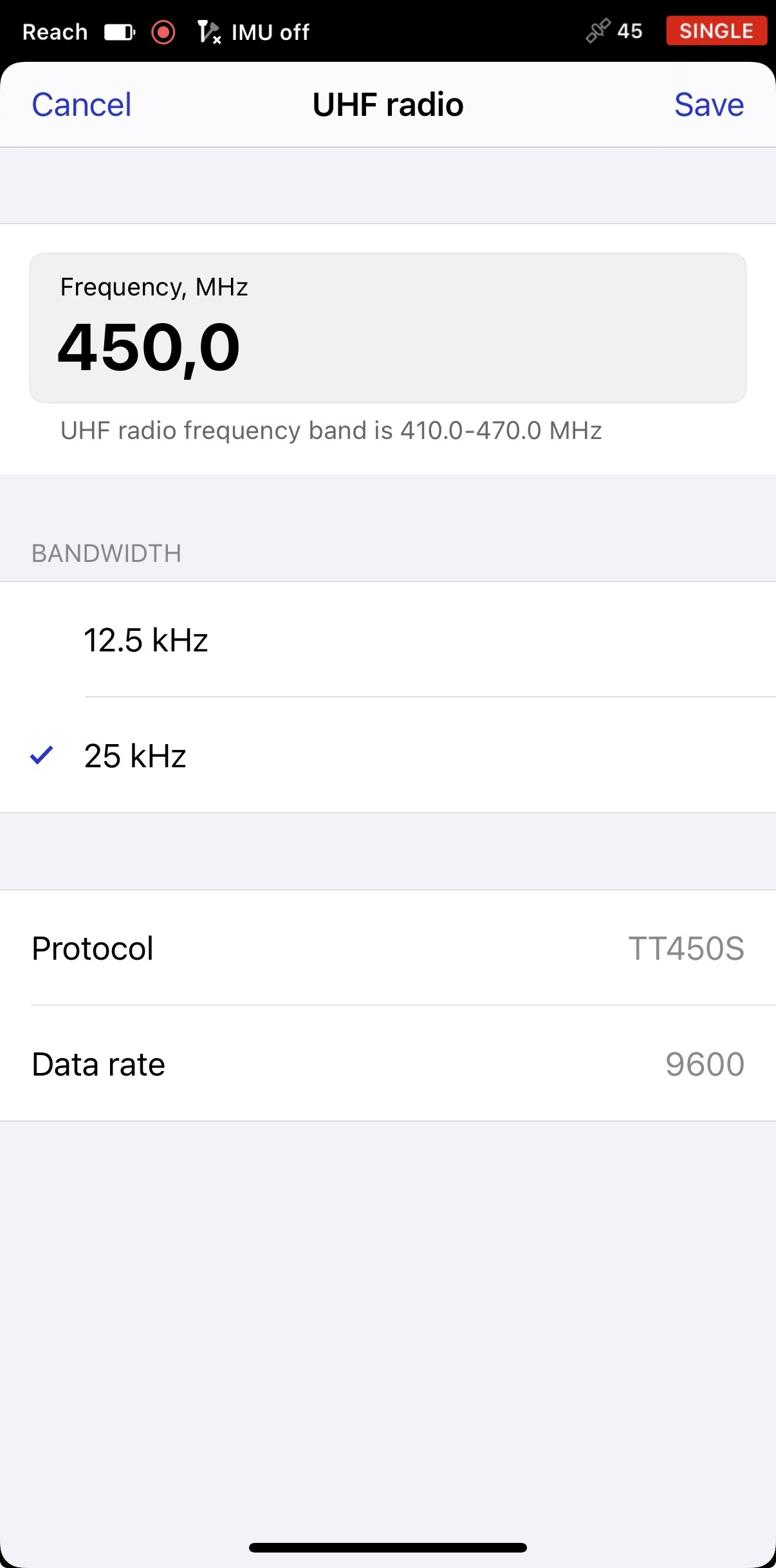 hinweis
hinweisDas UHF-Frequenzband beträgt 410,0 – 475,0 MHz. Das verwendete Protokoll ist TRIMTALK450S*.
Um sicherzustellen, dass die Korrekturen von der Basis an den Rover weitergegeben werden, können Sie UHF-Antennen anbringen und beide Empfänger für einige Minuten am Fenster platzieren, um einen freien Blick auf den Himmel zu erhalten. Öffnen Sie dann Emlid Flow, stellen Sie eine Verbindung zum Rover her und rufen Sie den Bildschirm Status auf. Blättern Sie nach unten zum Abschnitt Korrekturen und stellen Sie sicher, dass Ihr Rover Korrekturen empfängt.
Einheiten platzieren
Wenn Sie die Einstellungen an Basis und Rover vorgenommen haben, können Sie nach draußen gehen, um die Basis zu platzieren und den Einrichtungsprozess abzuschließen. Für die Arbeiten vor Ort benötigen Sie ein Stativ und einen Vermessungsstab. Gehen Sie wie folgt vor, um die Einheiten zu platzieren:
Vergewissern Sie sich vor dem Aufstellen der Basis, dass Sie sich in einem offenen Bereich mit freier Sicht zum Himmel befinden. Dies gewährleistet einen guten Signalempfang und eine ausreichende Anzahl an verfügbaren Satelliten.
-
Montieren Sie Ihre Basis auf dem Stativ und richten Sie das Stativ genau aus.
-
Setzen Sie den Rover auf den Stab.
-
Bringen Sie die UHF-Antennen an beiden Geräten an.
-
Schalten Sie die Empfänger ein.
-
Schließen Sie die Basiseinrichtung ab.
hinweisEinzelheiten über die Methode zur Eingabe der Basiskoordinaten und die Angabe der Basisposition finden Sie in der Dokumentation Ihres Basisherstellers.
Ergebnisse anzeigen
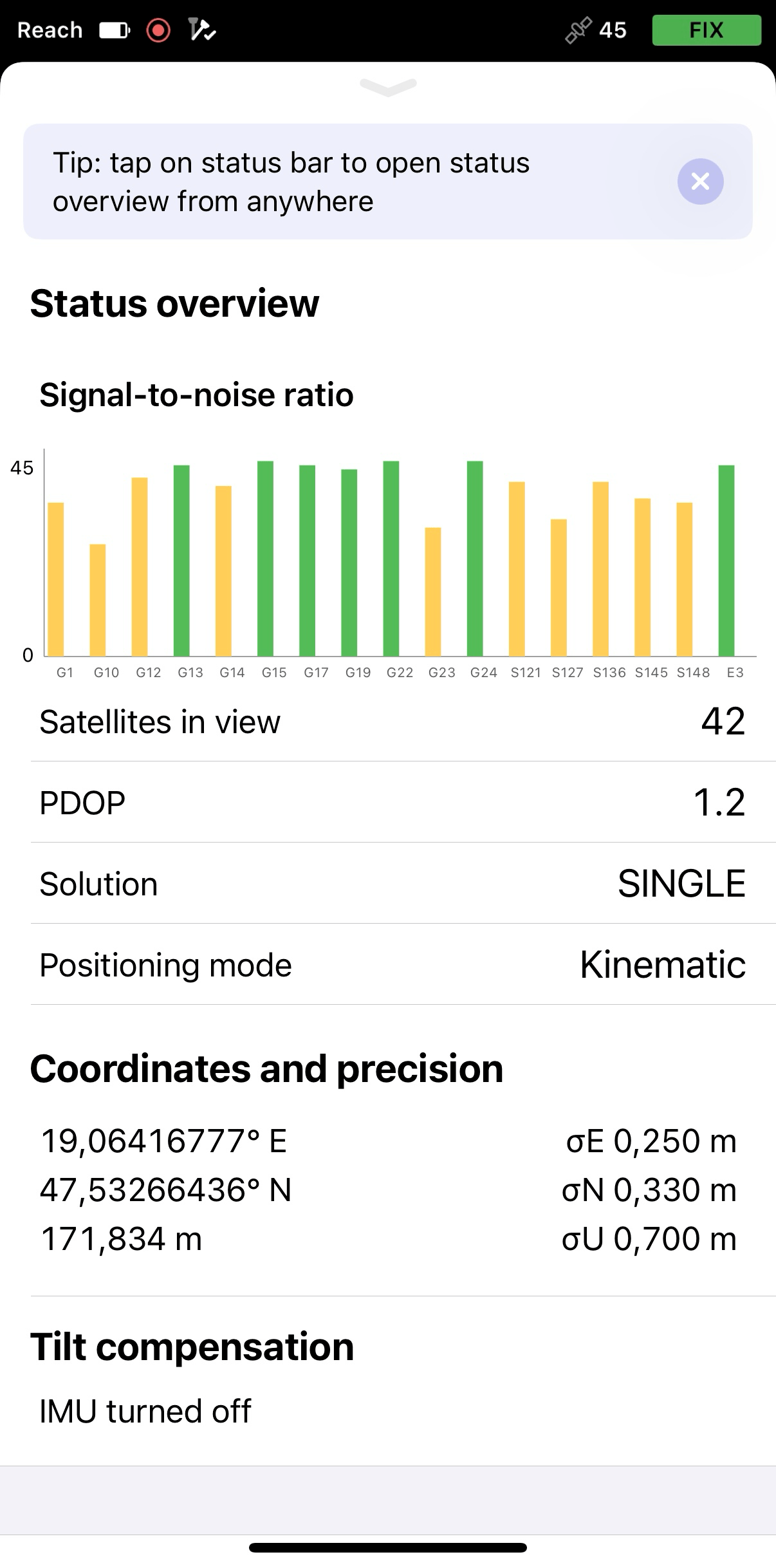
Wenn Sie Ihre RTK-Einrichtung über UHF-Funk abgeschlossen haben, können Sie den aktuellen Lösungsstatus in der oberen rechten Ecke der App Emlid Flow sehen:
-
SINGLE bedeutet, dass der Rover eine Lösung gefunden hat, die sich auf seinen eigenen Empfänger stützt, und dass keine Basiskorrekturen angewendet werden. Die Präzision im Standalone-Modus liegt in der Regel im Bereich von mehreren Metern.
-
FLOAT bedeutet, dass der Rover Korrekturen von der Basis erhält, aber nicht alle Mehrdeutigkeiten auflösen kann, und in diesem Fall liegt die Genauigkeit in der Regel im Submeterbereich.
-
FIX bedeutet, dass der Rover mit Hilfe von Korrekturen von der Basis die Mehrdeutigkeiten in seiner Positionsberechnung beseitigt und die Lösung mit Zentimetergenauigkeit erreicht hat.
Nach einer kurzen Zeitspanne erhält der Rover eine Fixed-Lösung (Zentimetergenauigkeit). Unter guten Bedingungen dauert es nur wenige Sekunden, um eine Fixed-Lösung (Zentimetergenauigkeit) zu erhalten. Unter schwierigen Bedingungen kann es etwas länger dauern. Sobald der Rover den FIX erhält, sind Sie bereit für die Vermessung.
Auf dem Bildschirm Status können Sie auch den aktuellen Lösungsstatus sowie Ihre Position in Echtzeit abrufen.
Wenn Sie gelernt haben, wie Sie RTK über UHF-Funkgerät einrichten, können Sie in der Anleitung Neigungskompensation auf dem Rover aktivieren nachlesen, wie Sie mit der Neigungskompensation auf Ihrem Reach RS4/RS4 Pro Rover arbeiten.
Weiterlesen
- So erstellen oder importieren Sie ein Projekt
- So erfassen Sie Punkte
- So werden Linien erfasst
- So werden Punkte abgesteckt
- So werden Linien abgesteckt
- So werden Projekte exportiert
*Warenzeichen von Trimble Inc.