Cómo trabajar con una base de terceros por radio UHF
Esta guía explica cómo configurar su Reach RS4/RS4 Pro para que funcione con una base de terceros a través de radio UHF.
Resumen
Puede configurar su Reach RS4 o Reach RS4 Pro como rover para trabajar con una base de terceros a través de radio UHF.
Reach RS4 y Reach RS4 Pro llevan integrada una radio UHF que opera en la banda de 410-470 MHz, proporciona hasta 2 W de potencia de salida y funciona con el protocolo Trimtalk 450S*; además, se aplican los límites regionales conforme a la normativa local. Reach RS4 puede transmitir y recibir correcciones RTK en UHF. En la mayoría de las regiones, la serie RS4 se suministra con planes de canales y límites de potencia específicos de la región preconfigurados en Emlid Flow para admitir el funcionamiento conforme a la normativa. Dependiendo de su jurisdicción, el funcionamiento en UHF puede requerir una licencia.
Para configurar la comunicación por radio UHF, utilice la antena UHF suministrada.
*Marca comercial de Trimble Inc.
Establecer su base de terceros
Establezca la configuración RTK y la comunicación por radio UHF en su base de terceros. Los detalles de configuración dependen del modelo base que esté utilizando.
Para configurar correctamente su base de terceros, siga las instrucciones del fabricante.
Configure su rover Reach RS4 / RS4 Pro
Para configurar su rover, siga los pasos que se indican a continuación:
-
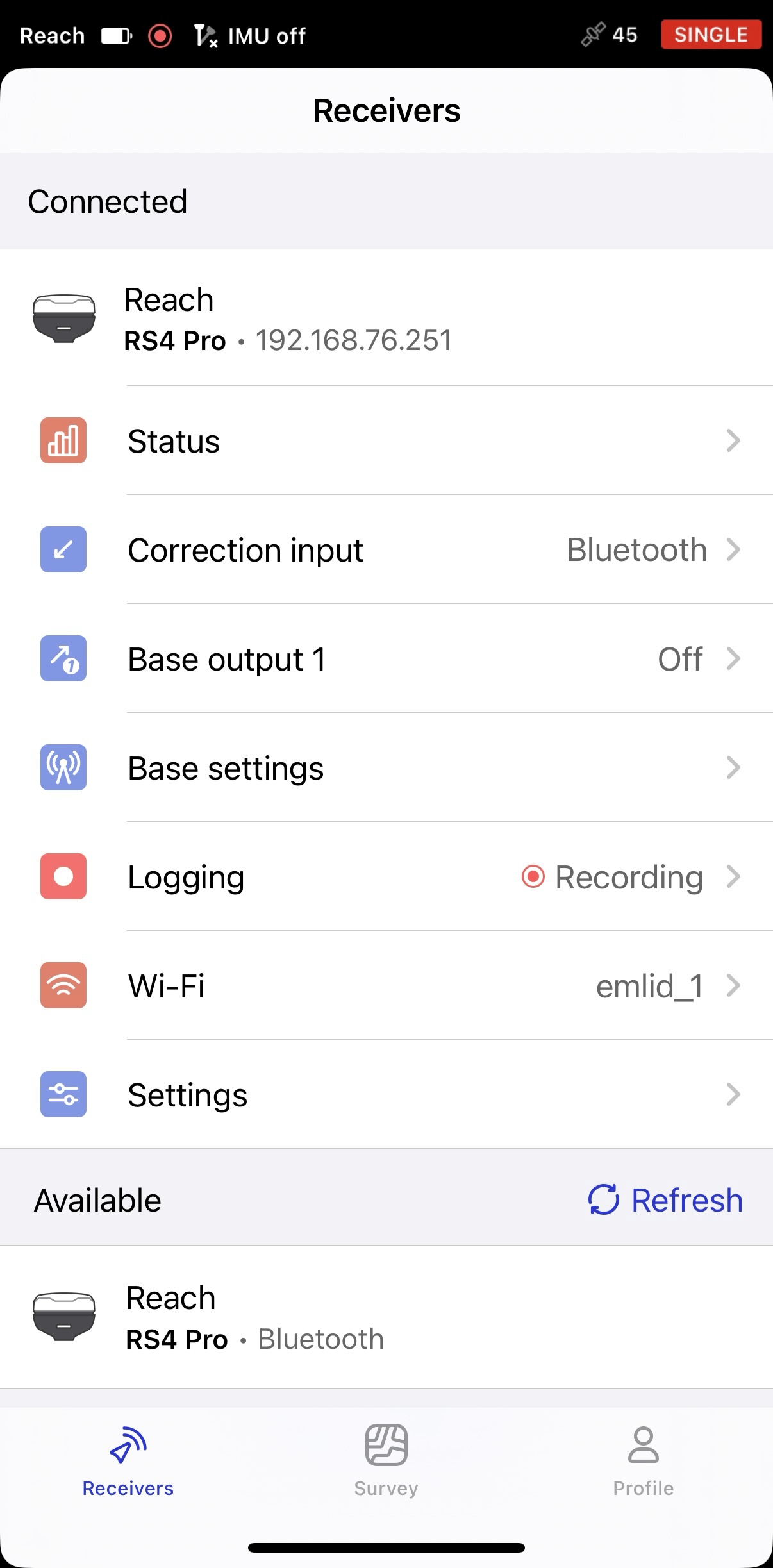
Abra la aplicación Emlid Flow y conéctese a Reach RS4/RS4 Pro.
-
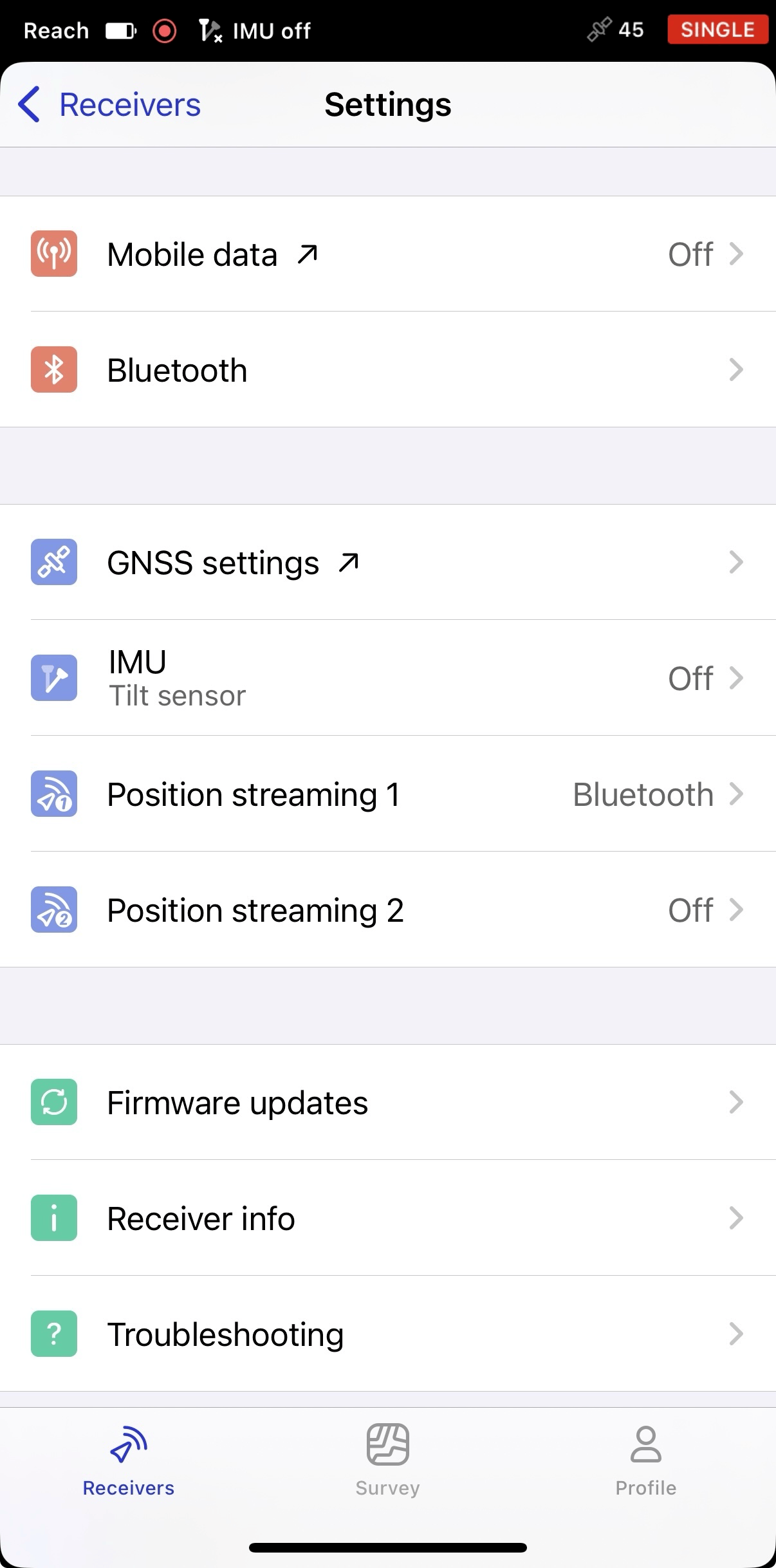
Vaya a Configuración y pulse Configuración de GNSS.
-
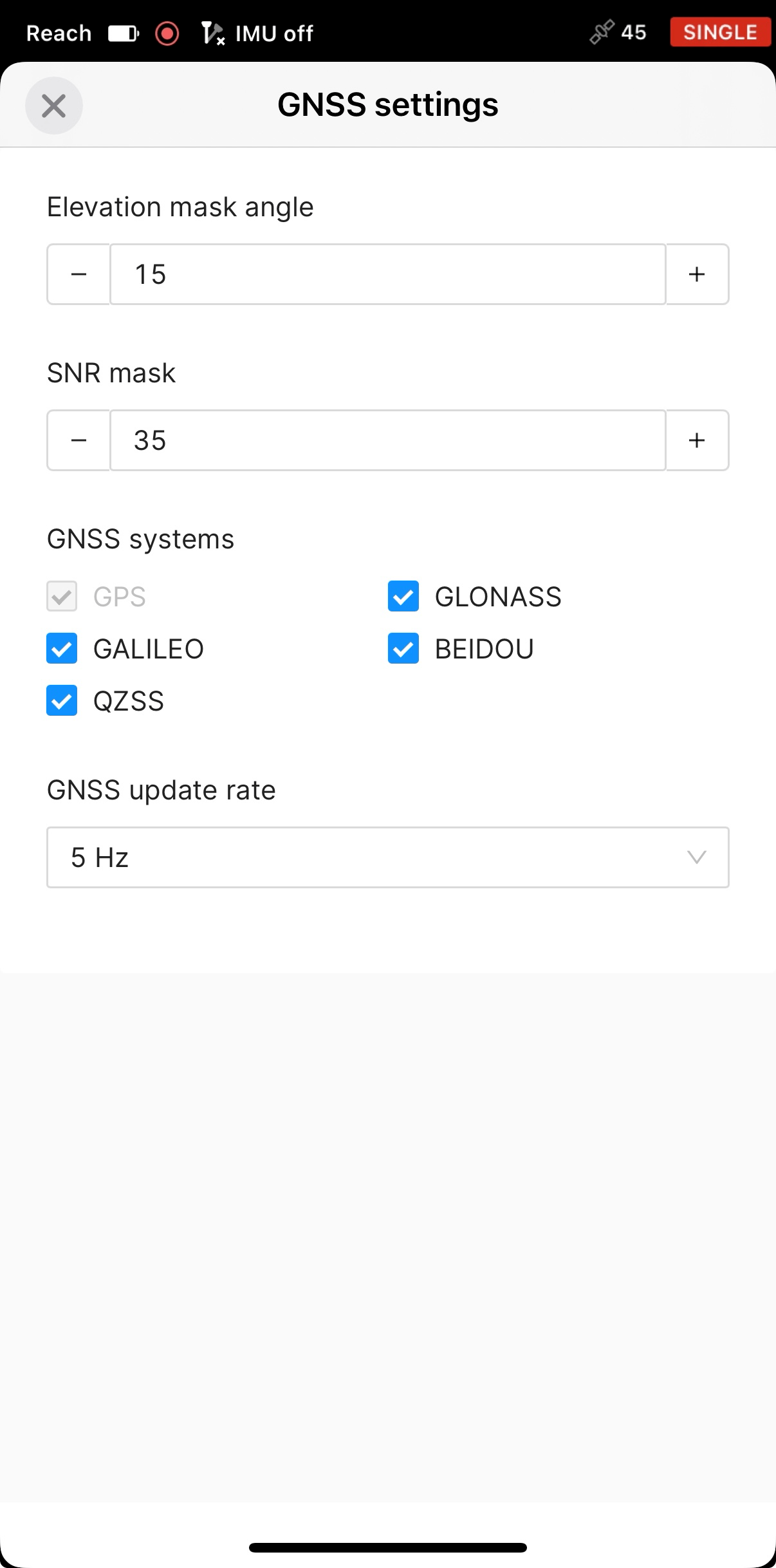
Seleccione los sistemas GNSS necesarios y establezca una frecuencia de actualización GNSS de 5 Hz. Aplicar cambios.
-
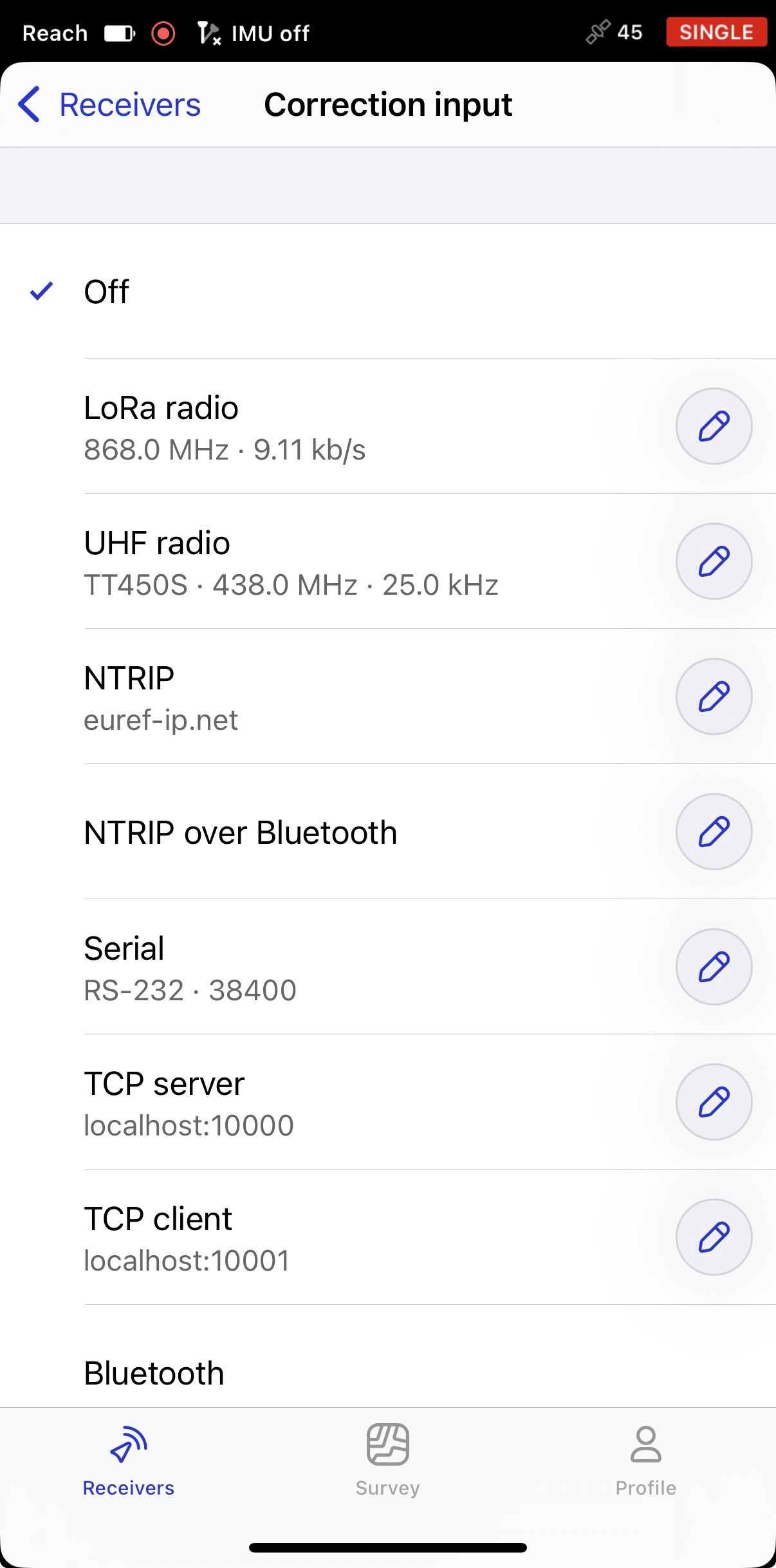
Para configurar su rover y que reciba las correcciones, vuelva a la pantalla Receptores y pulse Entrada de correcciones.
-
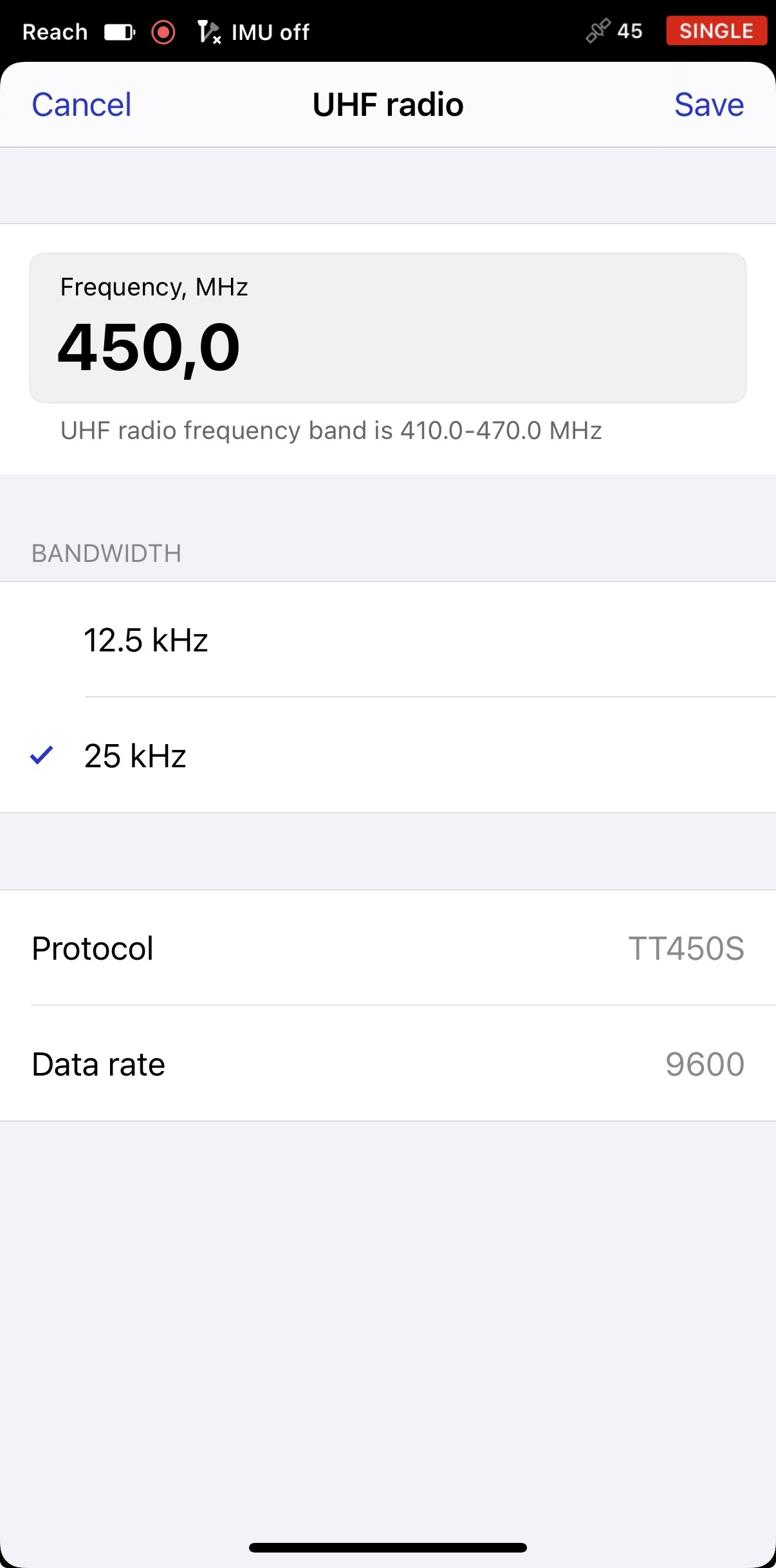
En la celda UHF, pulse el botón Editar. Ajuste la misma frecuencia y ancho de banda que para la base. La velocidad de transmisión de datos cambiará automáticamente en función del ancho de banda elegido: para 25 kHz, es de 9600 bit/s, para 12,5-4800 bit/s. Pulse Guardar.
 nota
notaLa banda de radiofrecuencia UHF es de 410,0 - 475,0 MHz. El protocolo utilizado es TRIMTALK450S*.
Para asegurarse de que las correcciones pasan de la base al rover, puede acoplar antenas UHF y colocar ambos receptores junto a la ventana durante unos minutos para tener una visión clara del cielo. A continuación, abra Emlid Flow, conéctese al rover y vaya a la pantalla Estado. Desplácese hasta la sección Correcciones y asegúrese de que su vehículo recibe correcciones.
Colocar unidades
Cuando haya configurado los ajustes tanto en la base como en el rover, ya podrá salir a colocar la base y completar el proceso de configuración. Para los trabajos de campo, necesitará un trípode y un poste topográfico. Para colocar las unidades, siga los pasos que se indican a continuación:
Antes de colocar la base, asegúrese de que está en una zona abierta con una vista despejada del cielo. Esto garantizará una buena recepción de la señal y un buen número de satélites disponibles.
-
Monte su base en el trípode y nivélelo con exactitud.
-
Coloque el rover en el poste.
-
Conecte las antenas UHF a ambas unidades.
-
Encienda los receptores.
-
Complete la configuración de la base.
notaConsulte la documentación del fabricante de la base para obtener información detallada sobre el método de introducción de coordenadas de la base y sobre cómo especificar la posición base.
Ver los resultados
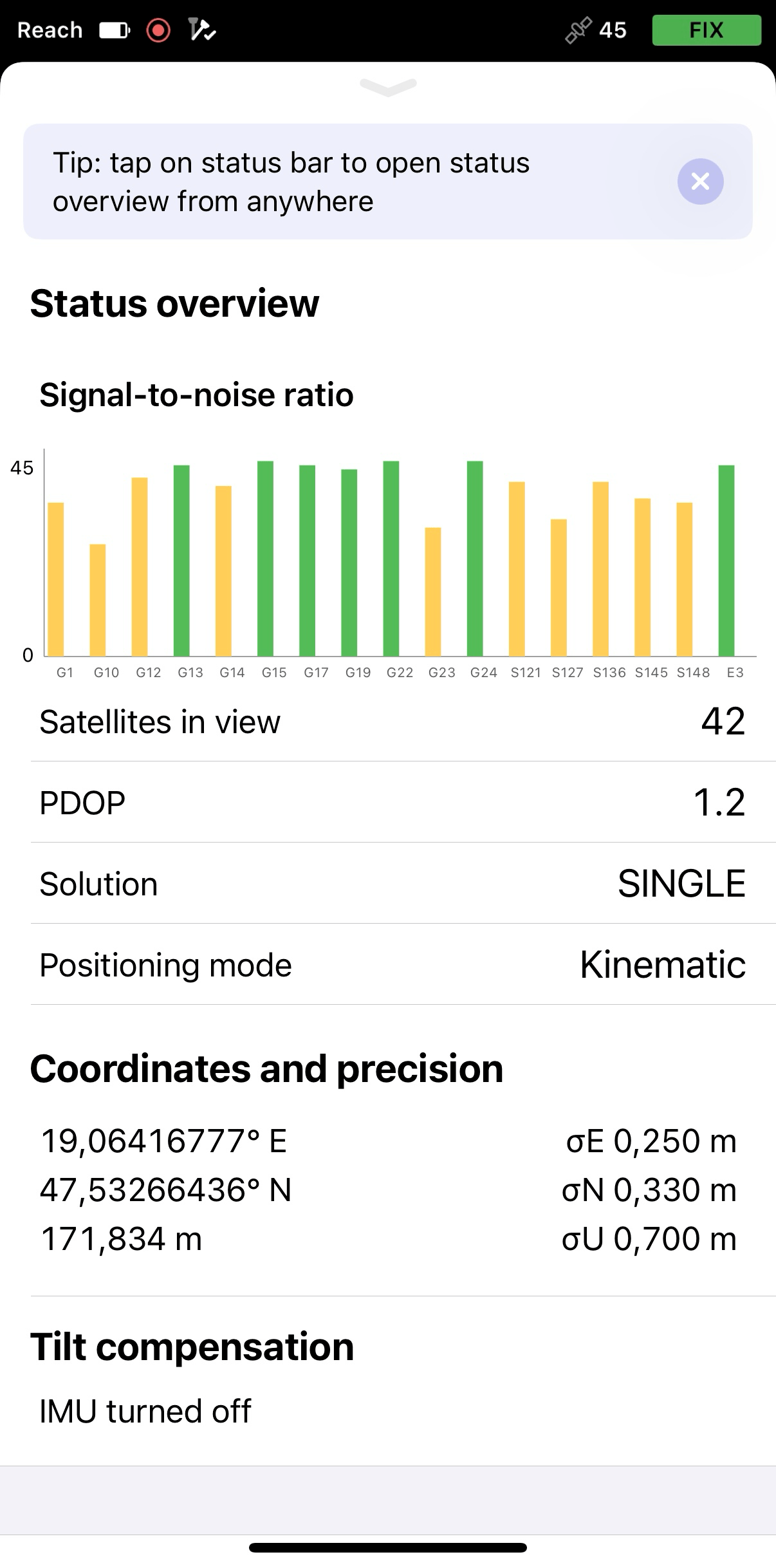
Cuando haya completado la configuración RTK por radio UHF, podrá ver el estado actual de la solución en la esquina superior derecha de la aplicación Emlid Flow:
-
SINGLE significa que el rover ha encontrado una solución basándose en su propio receptor y no se aplican correcciones de base. La precisión en modo autónomo suele ser de varios metros.
-
FLOAT significa que el rover recibe correcciones de la base, pero no puede resolver todas las ambigüedades, y en este caso, la precisión suele estar en el nivel submétrico.
-
FIX significa que el rover, utilizando las correcciones de la base, resolvió las ambigüedades en su cálculo posicional y alcanzó la solución con la precisión del nivel del centímetro.
Tras un breve periodo de tiempo, el rover obtiene una solución fija. En buenos entornos, se tardará unos segundos en obtener una solución fija. En condiciones difíciles, puede tardar un poco más. Una vez que el rover obtiene FIX, ya está todo listo para la topografía.
También puede encontrar el estado actual de la solución, así como su posición en tiempo real en la pantalla Estado.
Cuando sepa configurar RTK por radio UHF, puede aprender a trabajar con la compensación de inclinación en su rover Reach RS4/RS4 Pro con la guía Cómo activar la compensación de inclinación en el rover.
Más información
- Cómo crear o importar un proyecto
- Cómo recolectar puntos
- Cómo recolectar líneas
- Cómo replantear puntos
- Cómo replantear líneas
- Cómo exportar proyectos
*marca comercial de Trimble Inc.