Comment configurer la hauteur de l'antenne pour RTK
Ce guide explique comment configurer la hauteur de l'antenne sur votre base et votre rover pour assurer des élévations précises en RTK.
Vue d'ensemble
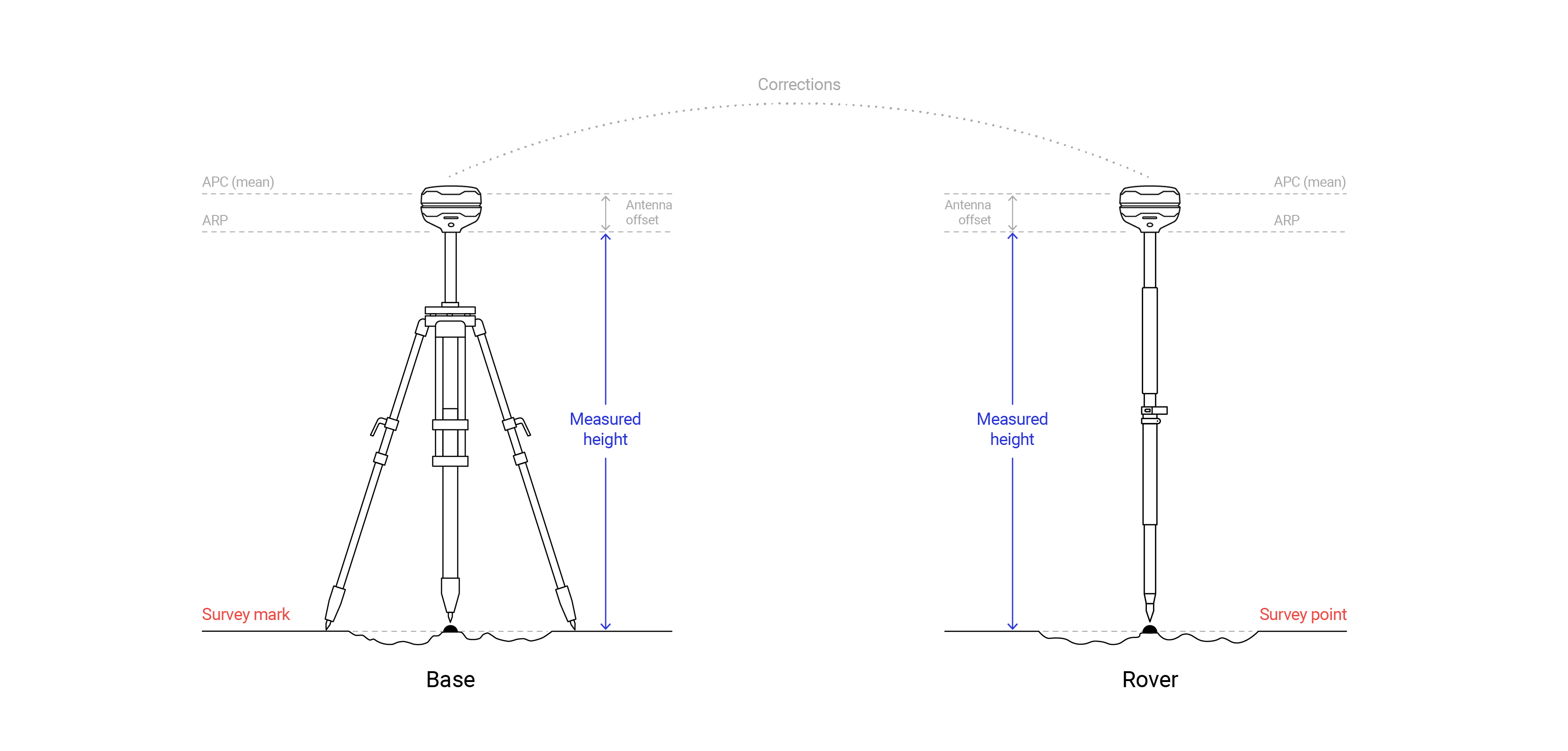
Les récepteurs Reach calculent les positions au centre de phase de l'antenne (APC). L'APC est le point effectif où les signaux GNSS sont reçus. Cependant, pour les tâches d'arpentage, vous avez généralement besoin des coordonnées du point au sol. Pour obtenir des coordonnées précises au niveau du sol, vous devez entrer la hauteur de l'antenne dans Emlid Flow.
Pour les récepteurs GNSS, la hauteur de l'antenne est la distance entre la marque au sol et le centre de phase de l'antenne (APC). Cette hauteur se compose de deux éléments :
- la distance entre la marque au sol et le point central au bas du Reach, le point de référence de l'antenne (ARP),
- le décalage de l'antenne entre l'ARP et l'APC.
Dans Emlid Flow, vous devez uniquement entrer la hauteur jusqu'à l'ARP, qui est la hauteur jusqu'au bas du récepteur. L'application ajoute automatiquement le décalage de l'antenne, qui dépend de votre modèle Reach. De plus, lorsque vous définissez la hauteur de l'antenne dans une section de l'application, elle est mise à jour partout ailleurs. Cela maintient les valeurs cohérentes tout au long du workflow.
Pour synchroniser automatiquement la hauteur de l'antenne dans toutes les sections, assurez-vous que votre récepteur exécute la version de firmware 32 ou ultérieure. Dans les versions antérieures, vous devrez mettre à jour la hauteur manuellement dans chaque section.
Différence entre la configuration de la hauteur de l'antenne de la base et du rover
La base envoie sa position APC au rover. Lorsque vous entrez les coordonnées connues de la base en utilisant la méthode de saisie Manuelle, ces coordonnées se réfèrent généralement au point au sol. Ainsi, Emlid Flow ajoute la hauteur mesurée au décalage de l'antenne pour obtenir la position APC, et envoie ces données au rover.
Si vous utilisez la méthode de saisie des coordonnées Moyenne, vous avez la position APC directement.
Les coordonnées du rover en RTK sont déterminées au centre de phase de l'antenne. Pour obtenir les coordonnées du point au sol, entrez la hauteur de la perche dans l'onglet Survey (Arpentage) ; Emlid Flow ajustera automatiquement les mesures.
Flux de travail
Base
Pour configurer la hauteur de l'antenne pour votre base Reach, suivez les étapes ci-dessous :
-
Ouvrez l'application Emlid Flow et connectez-vous à votre récepteur.
-
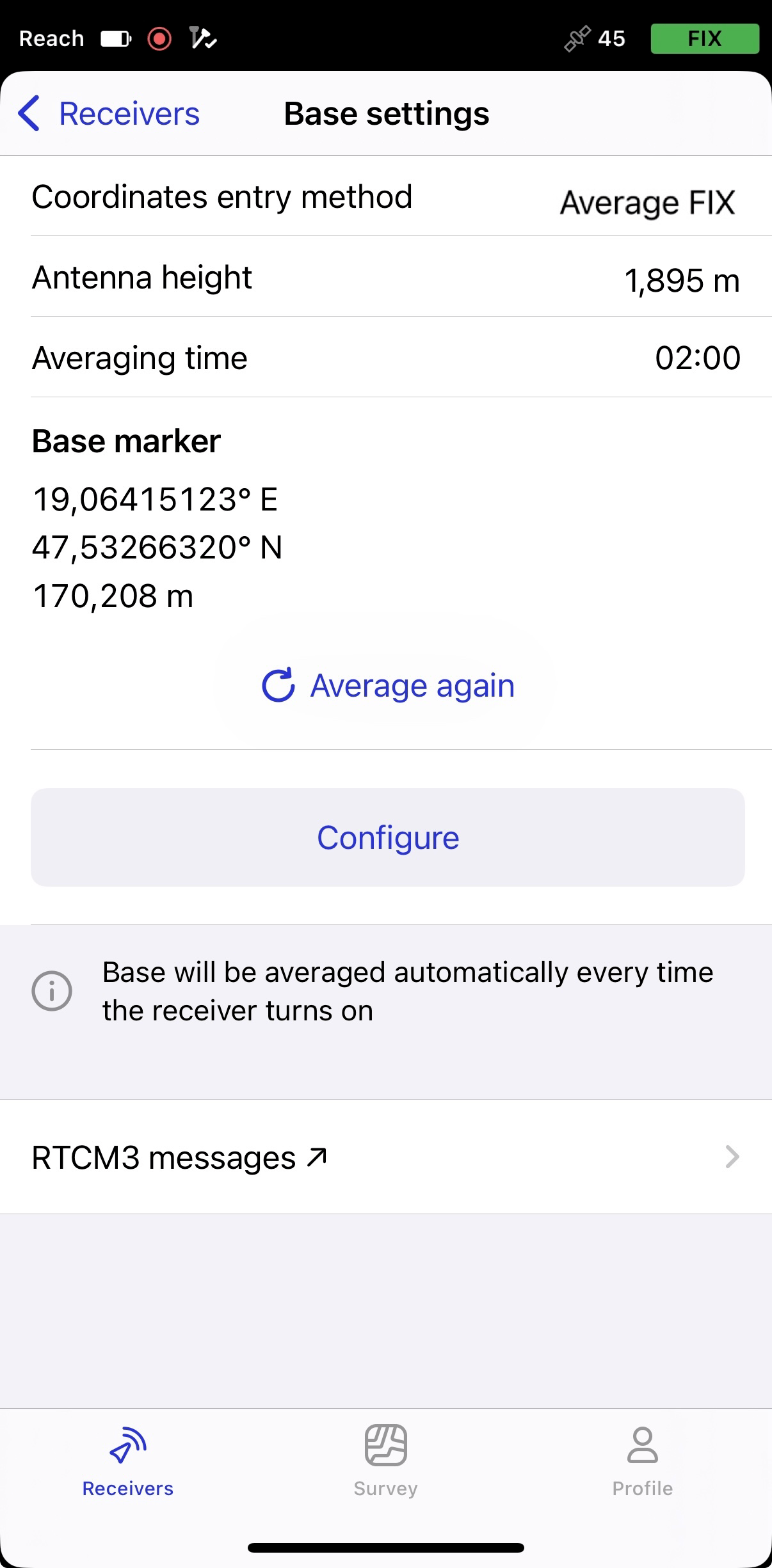
Ouvrez Base settings (Paramètres de base).
-
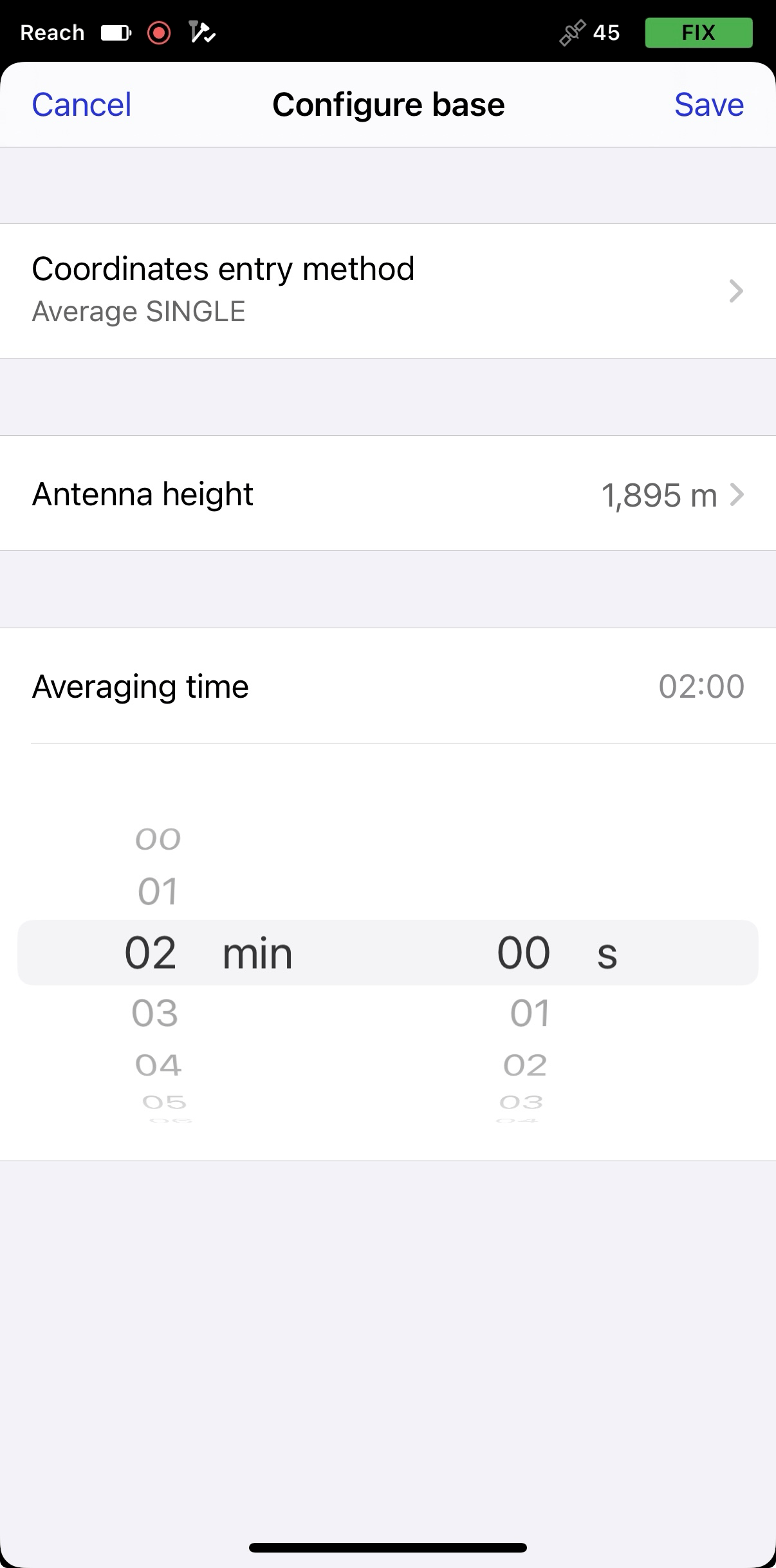
Appuyez sur Configure (Configurer) et ajoutez la hauteur mesurée de votre trépied. Rappelez-vous, le décalage de l'antenne sera ajouté automatiquement.
-
Appuyez sur Save (Enregistrer).
Maintenant que la hauteur de votre antenne est correctement configurée, vous pouvez procéder à la collecte de données précise.
Rover
Pour configurer la hauteur de l'antenne pour votre rover Reach, suivez les étapes ci-dessous :
Entrez la hauteur de l'antenne dans les mêmes unités que le projet. Pour en savoir plus, lisez nos guides de configuration du système de coordonnées.
-
Ouvrez l'application Emlid Flow et connectez-vous à votre récepteur.
-
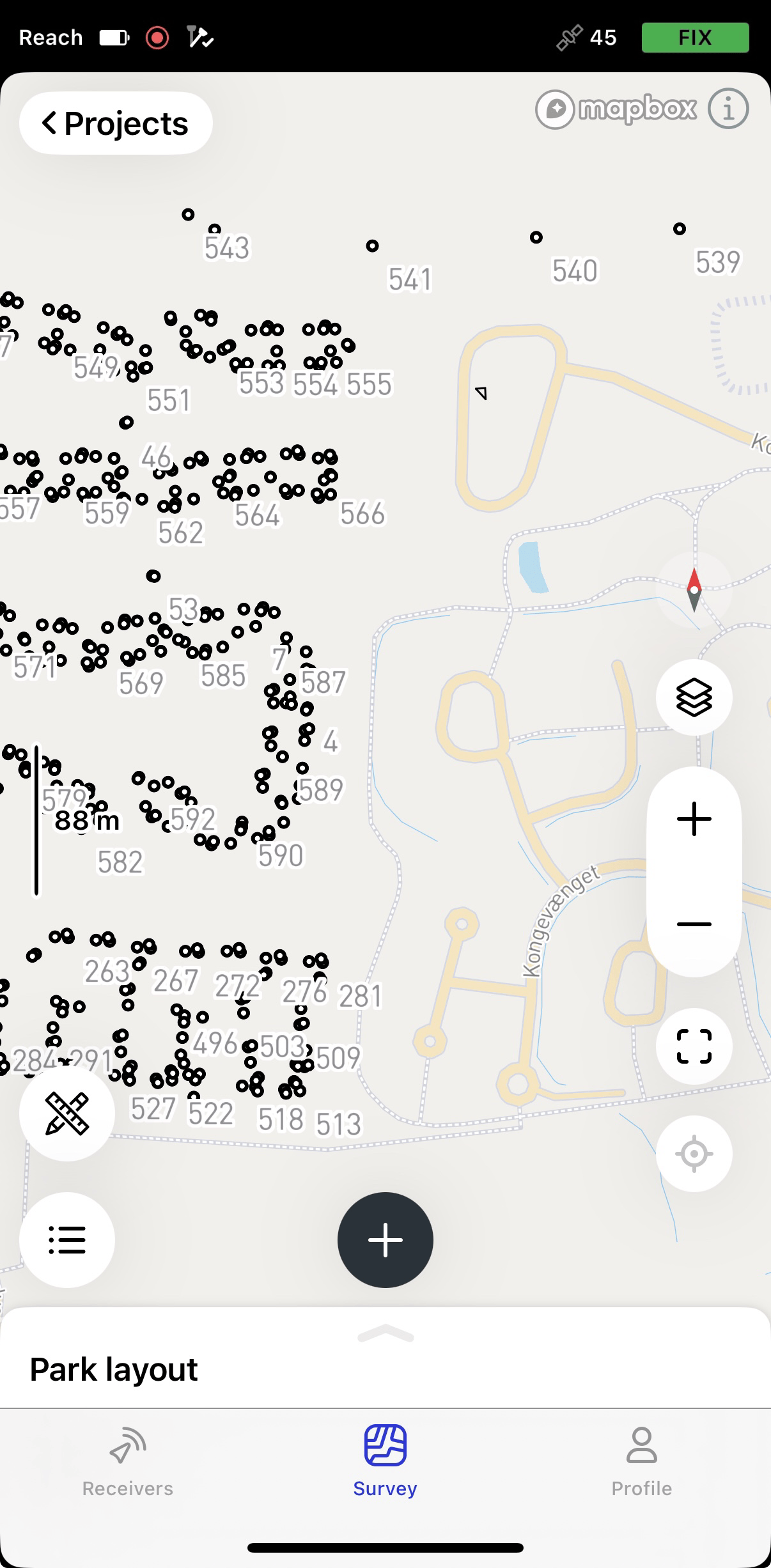
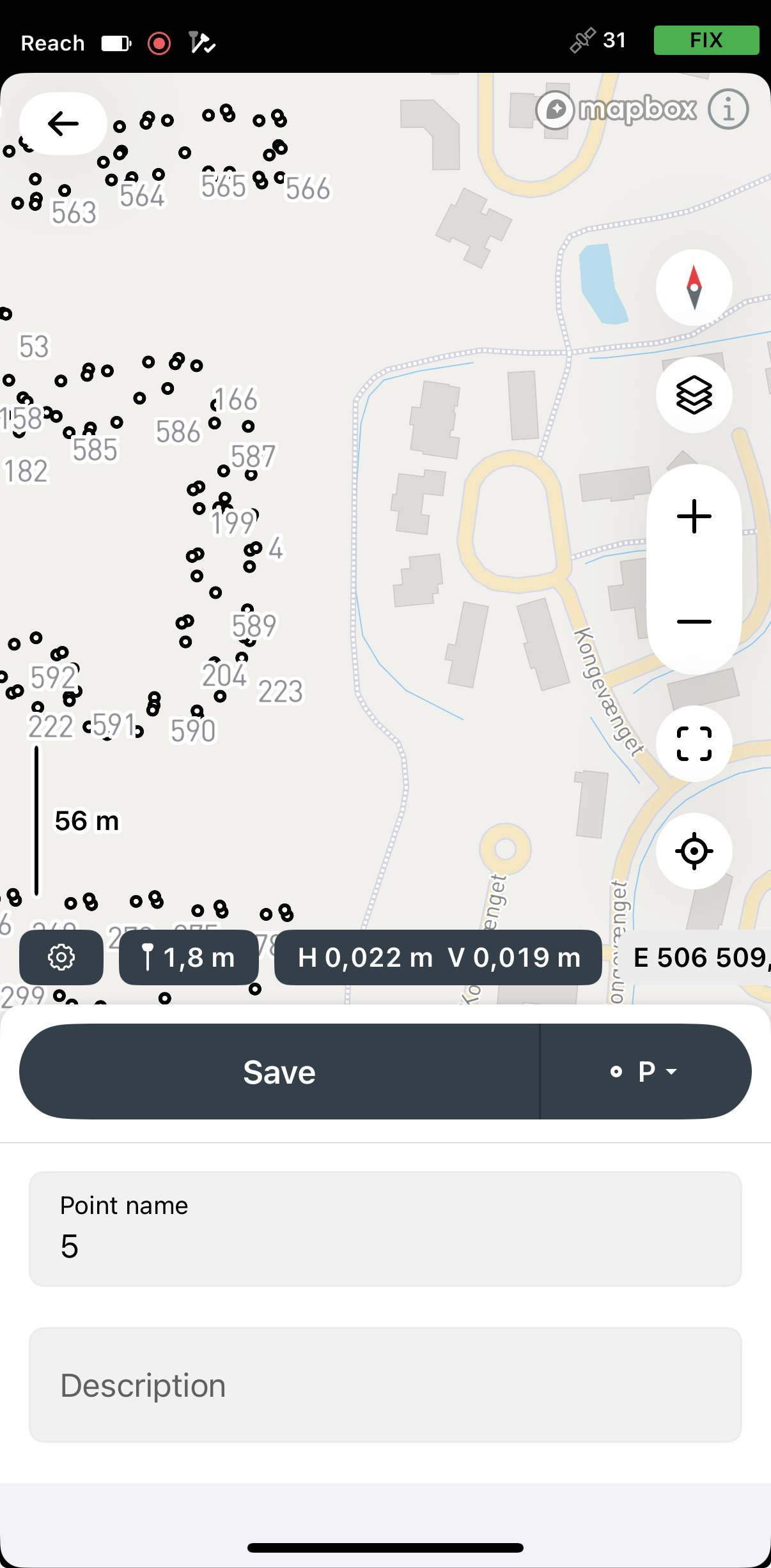
Allez dans l'onglet Survey (Arpentage) et appuyez sur +.
-
Appuyez sur l'icône Pole (Perche).
-
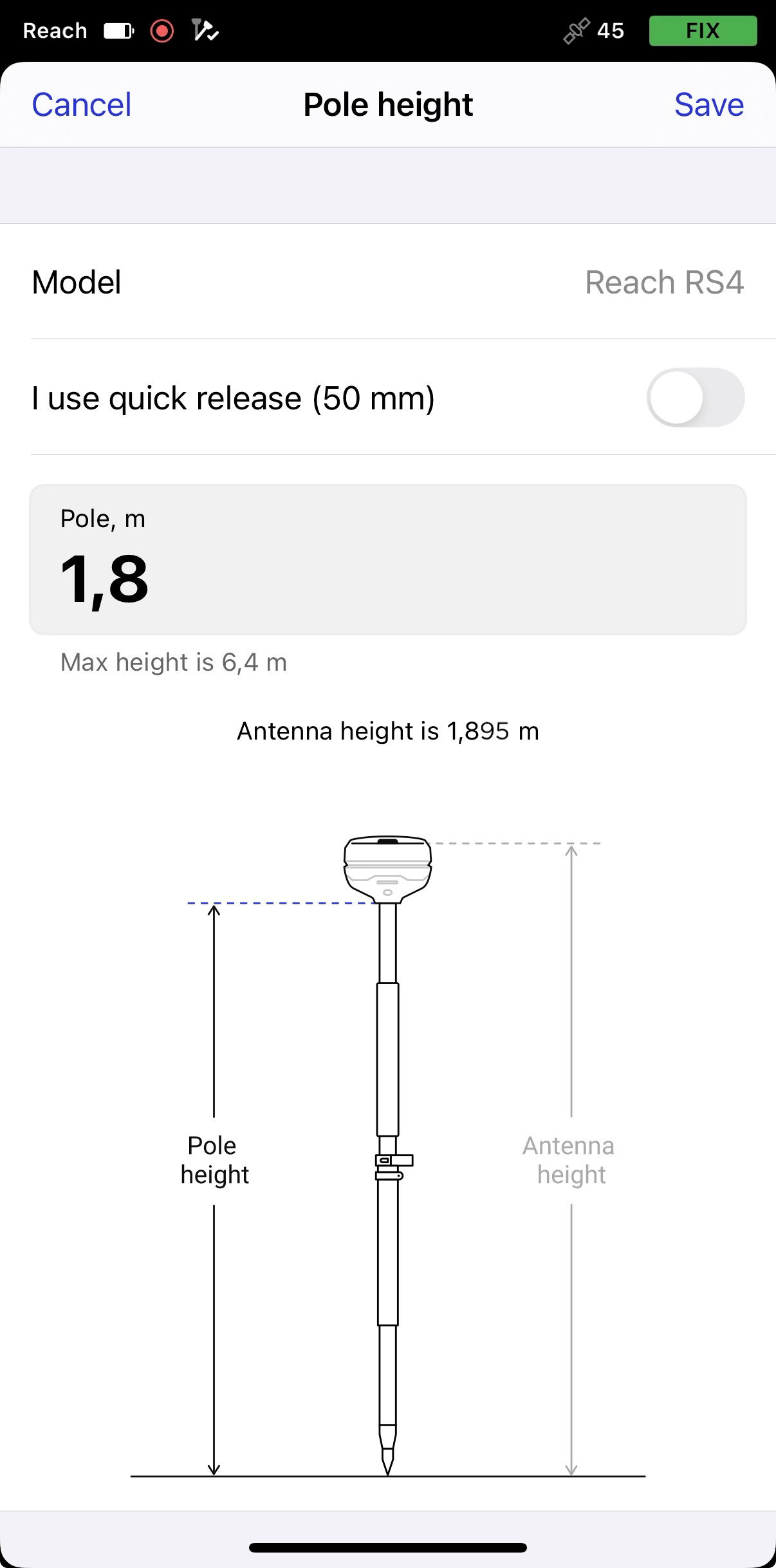
Ici, vous pouvez définir la hauteur de votre perche d'arpentage. Gardez à l'esprit que le décalage de l'antenne sera ajouté automatiquement. Vous pouvez voir le résultat final juste au-dessus de l'image du récepteur.
-
Appuyez sur Save (Enregistrer).
Maintenant, vous pouvez procéder à la collecte de données.
Le fichier CSV exporté inclut la hauteur de l'antenne du rover jusqu'à l'APC pour chaque point collecté, ce qui facilite la révision et la vérification de vos données.