Integrazione di Reach RS4 con Mergin Maps per Android
Questo tutorial fornisce istruzioni dettagliate su come integrare il proprio Reach RS4 con Mergin Maps per Android tramite Bluetooth.
Panoramica
Mergin Maps è un'app mobile per dispositivi Android che consente di raccogliere, condividere e pubblicare geodati e di collaborare con i team utilizzando la sincronizzazione istantanea con QGIS.
Per integrare il proprio Reach RS4 con Mergin Maps tramite Bluetooth, è necessario quanto segue:
- Reach RS4
note
Assicurarsi che il ricevitore Reach esegua la versione del firmware 34.4 o successiva per trasmettere messaggi NMEA compensati tramite Bluetooth.
- Un dispositivo Android
- App mobile Mergin Maps installata sul proprio dispositivo Android
- Account Mergin Maps
Flusso di lavoro
Per integrare il proprio Reach RS4 con Mergin Maps, seguire i passaggi seguenti.
Accedere a Reach utilizzando Emlid Flow
È possibile connettersi al proprio Reach in due modi:
- Utilizzando l'opzione di connessione BLE. Utilizzando l'opzione di connessione BLE. Questo è il metodo di connessione consigliato. È particolarmente utile quando si lavora con le correzioni di un provider NTRIP. In questa configurazione, il ricevitore utilizza la connessione internet del dispositivo mobile, pertanto è sufficiente selezionare l'opzione NTRIP over BLE durante la configurazione della correzione in ingresso del ricevitore.
- Utilizzando l'opzione di connessione Wi-Fi. In questo caso, il dispositivo e il Reach devono trovarsi nella stessa rete Wi-Fi.
Per connettersi al proprio Reach, seguire questi passaggi:
- Bluetooth connection
- Hotspot connection
-
Abilitare il Bluetooth sullo smartphone o sul tablet.
-
Aprire Emlid Flow. Quando richiesto, toccare Configure access (Configura accesso) e consentire le autorizzazioni di localizzazione. Questo è necessario per la piena funzionalità del ricevitore.
Dopo aver concesso le autorizzazioni, il ricevitore apparirà nell'elenco. L'app si collegherà automaticamente.
-
Andare su Impostazioni Wi-Fi sul proprio dispositivo.
-
Connettersi all'hotspot di Reach. Appare come reach:XX:XX.
-
Inserire la password di rete. La password di Default è emlidreach. Se è stata cambiata in precedenza, inserire invece la password personalizzata.
notePer ripristinare la password Wi-Fi di Default, emlidreach, è necessario eseguire il riflash del ricevitore. Note: il riflash cancella ogni registrazione memorizzata sul ricevitore e ripristina tutte le impostazioni ai loro valori di default.
-
Aprire Emlid Flow e connettersi al proprio Reach.
Per maggiori informazioni sulla connessione al dispositivo Reach, consultare la guida Connessione a Reach. La connessione Bluetooth è il metodo consigliato.
Il nome di Reach viene visualizzato appena sopra il MAC. In questa guida, abbiamo utilizzato l'unità denominata Reach.
Configurare le correzioni in Emlid Flow
Consultare le seguenti guide per configurare la ricezione delle correzioni sul rover Reach RS4/RS4 Pro:
- Come configurare l'RTK tramite il servizio NTRIP
- Come lavorare con una base di terze parti tramite radio UHF
- Come configurare l'RTK tramite radio LoRa
Configurare la connessione Bluetooth in Emlid Flow
Attivare la visibilità Bluetooth, in modo che il tuo dispositivo possa essere rilevato da altri dispositivi. Per farlo, seguire questi passaggi:
-
Andare su Settings (Impostazioni) in Emlid Flow e toccare Bluetooth.
-
Toccare Discoverability (Visibilità) e attivare l'opzione Discoverability (Visibilità). Toccare Save (Salva) per applicare le modifiche.
Abilitare la compensazione dell'inclinazione
Reach RS4 / RS4 supporta la compensazione dell'inclinazione basata su IMU, consentendo di rilevare e picchettare i punti anche quando la palina topografica è inclinata. Il software calcolerà l'angolo e la distanza di inclinazione e determinerà la posizione della punta della palina a terra. Per abilitare la compensazione dell'inclinazione, seguire la guida Come abilitare la compensazione dell'inclinazione.
Configurazione dello stream NMEA in Emlid Flow
Per inviare i dati di posizione ad applicazioni esterne, configura la trasmissione della posizione in formato NMEA come segue:
-
In Emlid Flow, andare su Settings (Impostazioni).
-
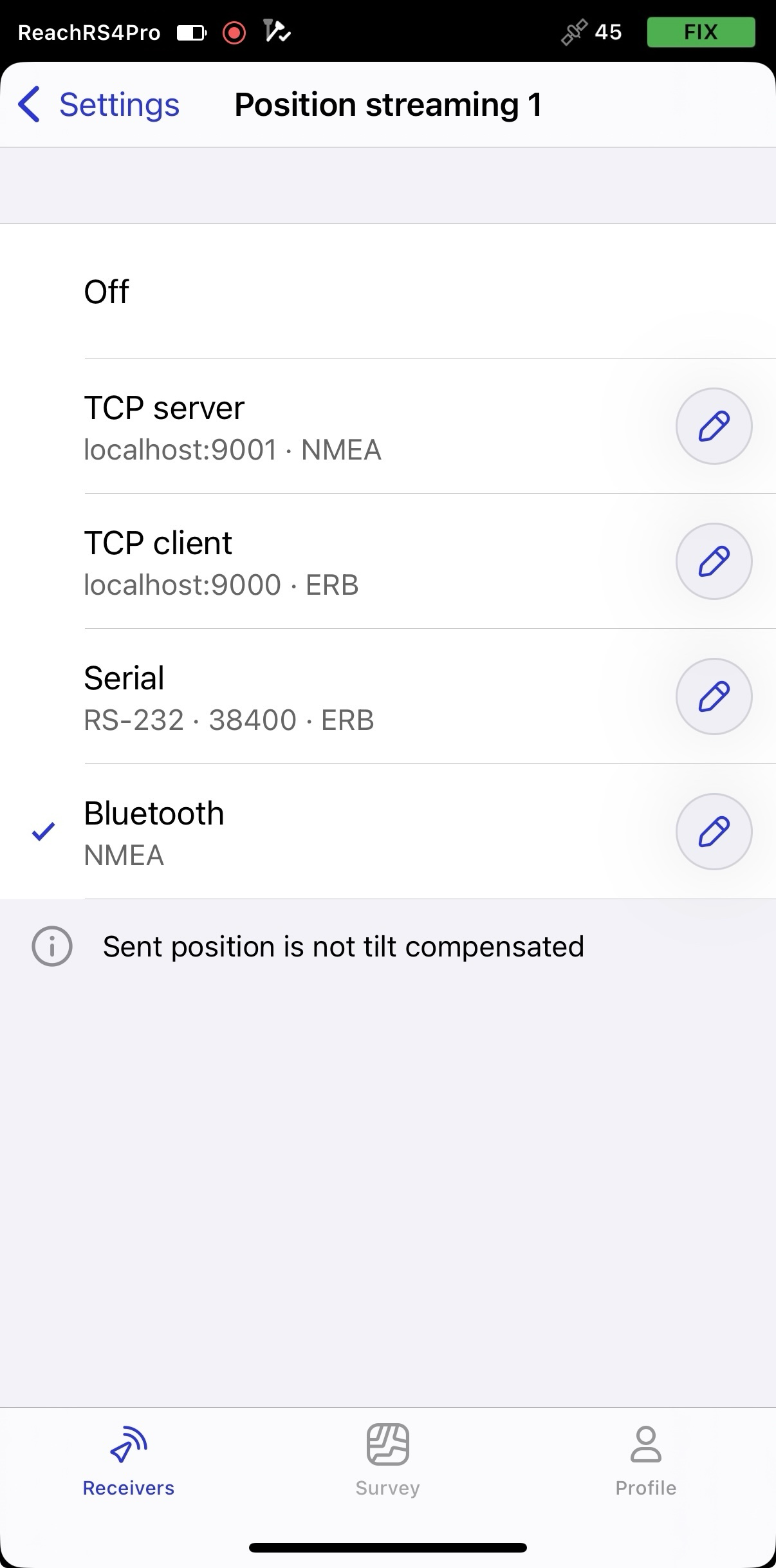
Toccare Position streaming 1 (Trasmissione della posizione 1) e selezionare Bluetooth.
-
Per configurare lo streaming della posizione, toccare il pulsante Edit (Modifica) nella cella Bluetooth.
noteQuando si è connessi al proprio Reach tramite Bluetooth, Emlid Flow chiederà di connettersi all'hotspot di Reach per accedere alle impostazioni di configurazione dello streaming.
-
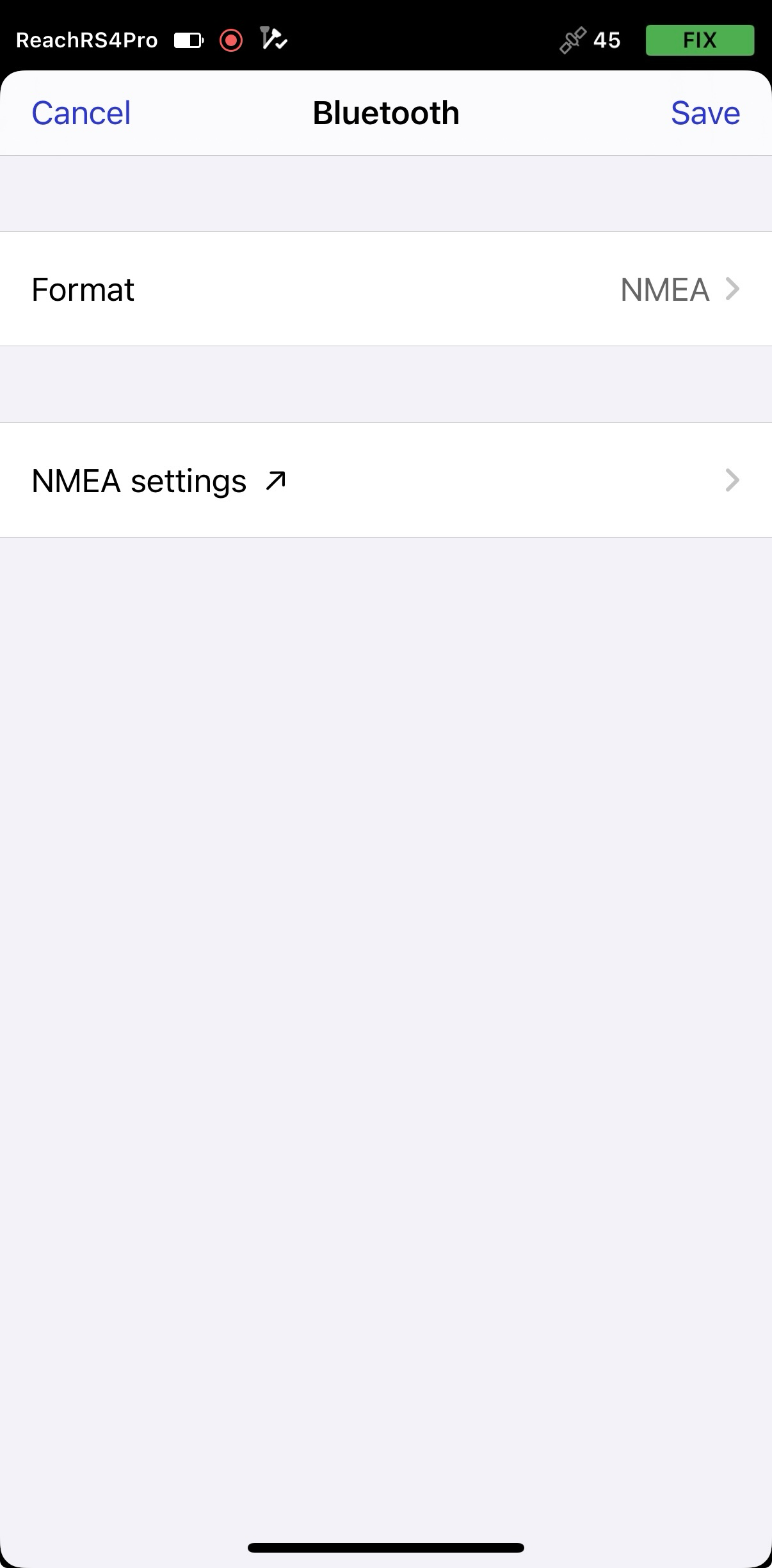
Toccare Format (Formato) e scegliere NMEA.
-
Applicare le modifiche necessarie.
-
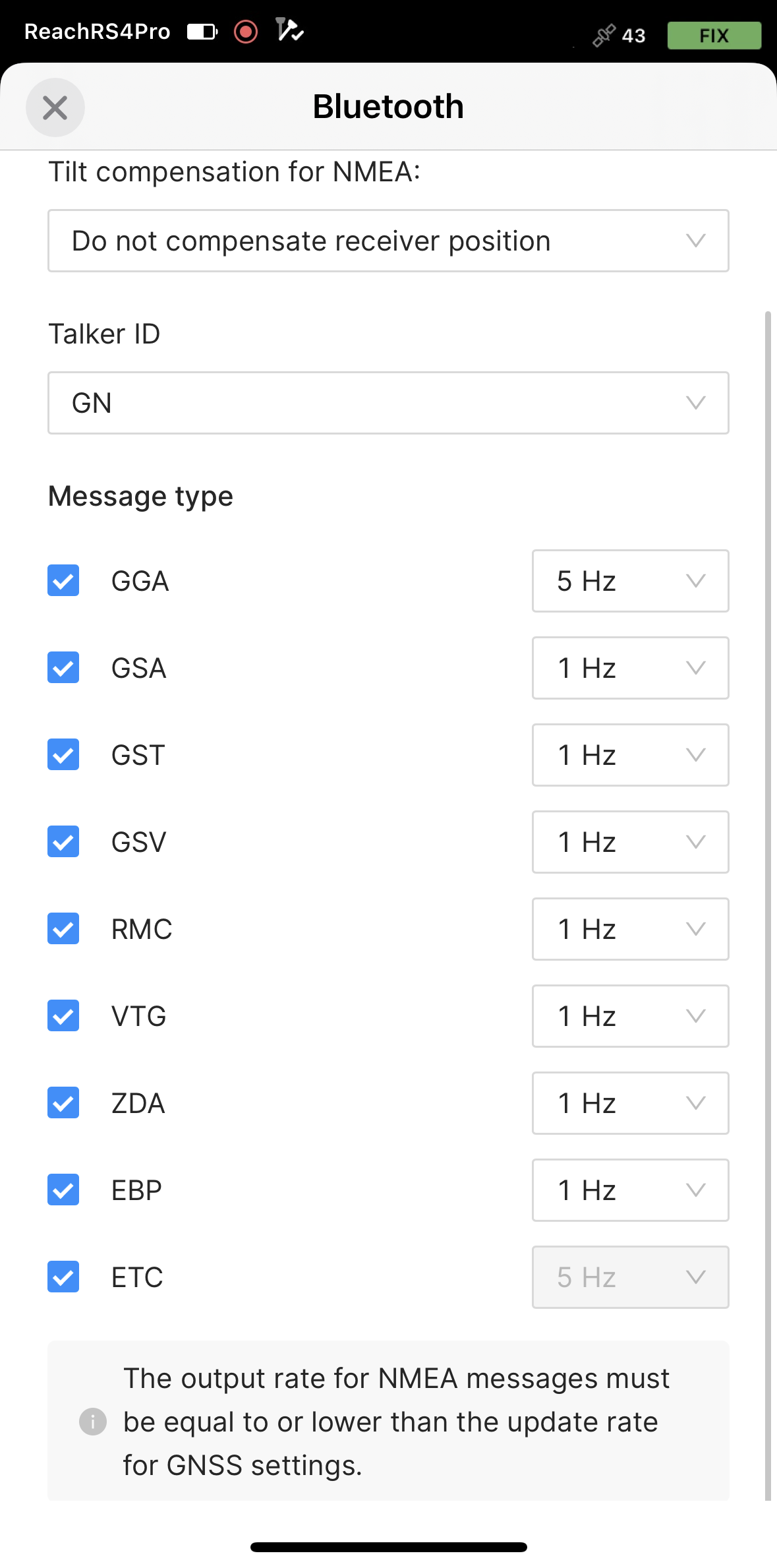
Per inviare messaggi NMEA compensati, è necessario abilitare tale funzione in Emlid Flow.
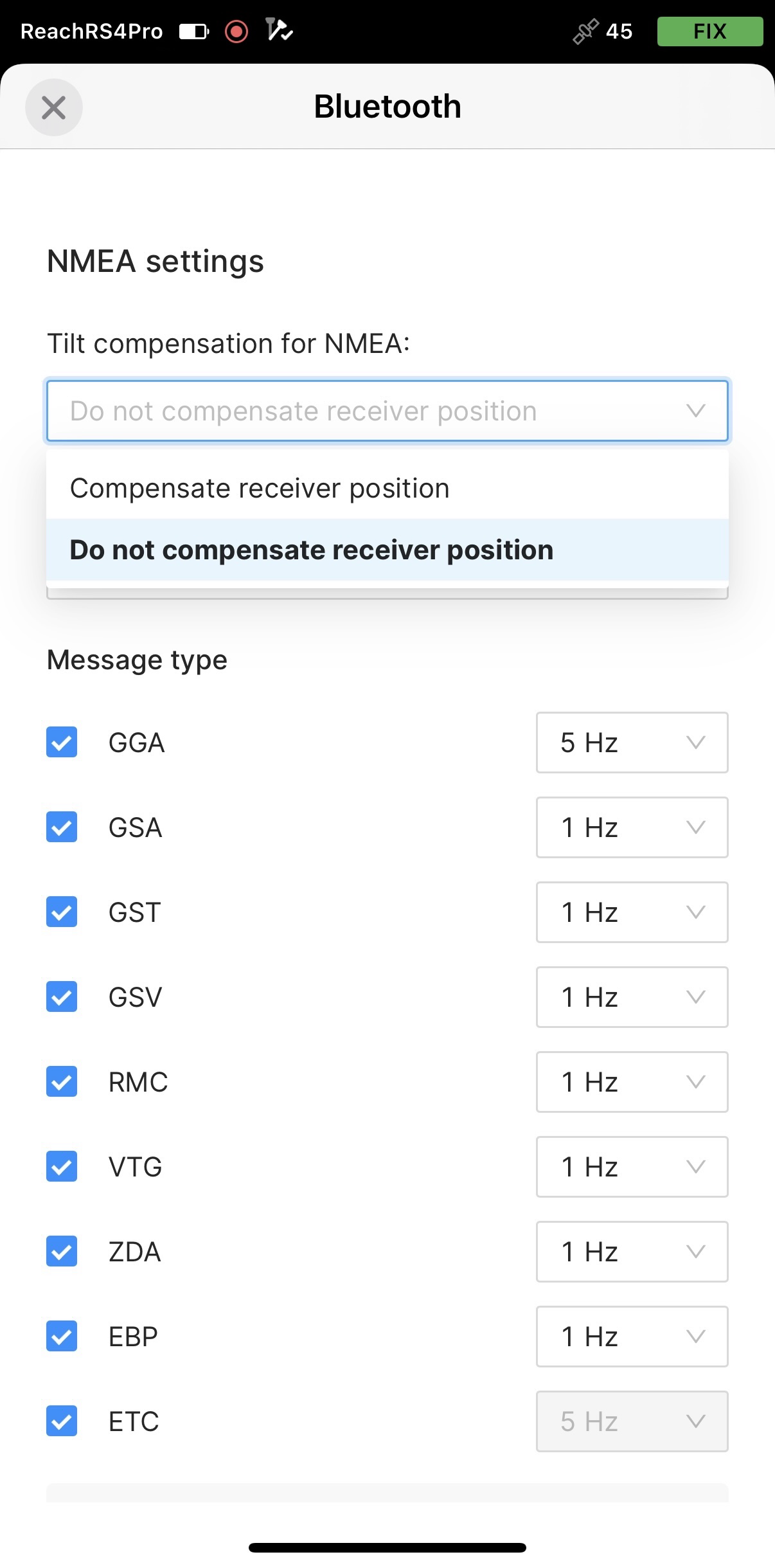
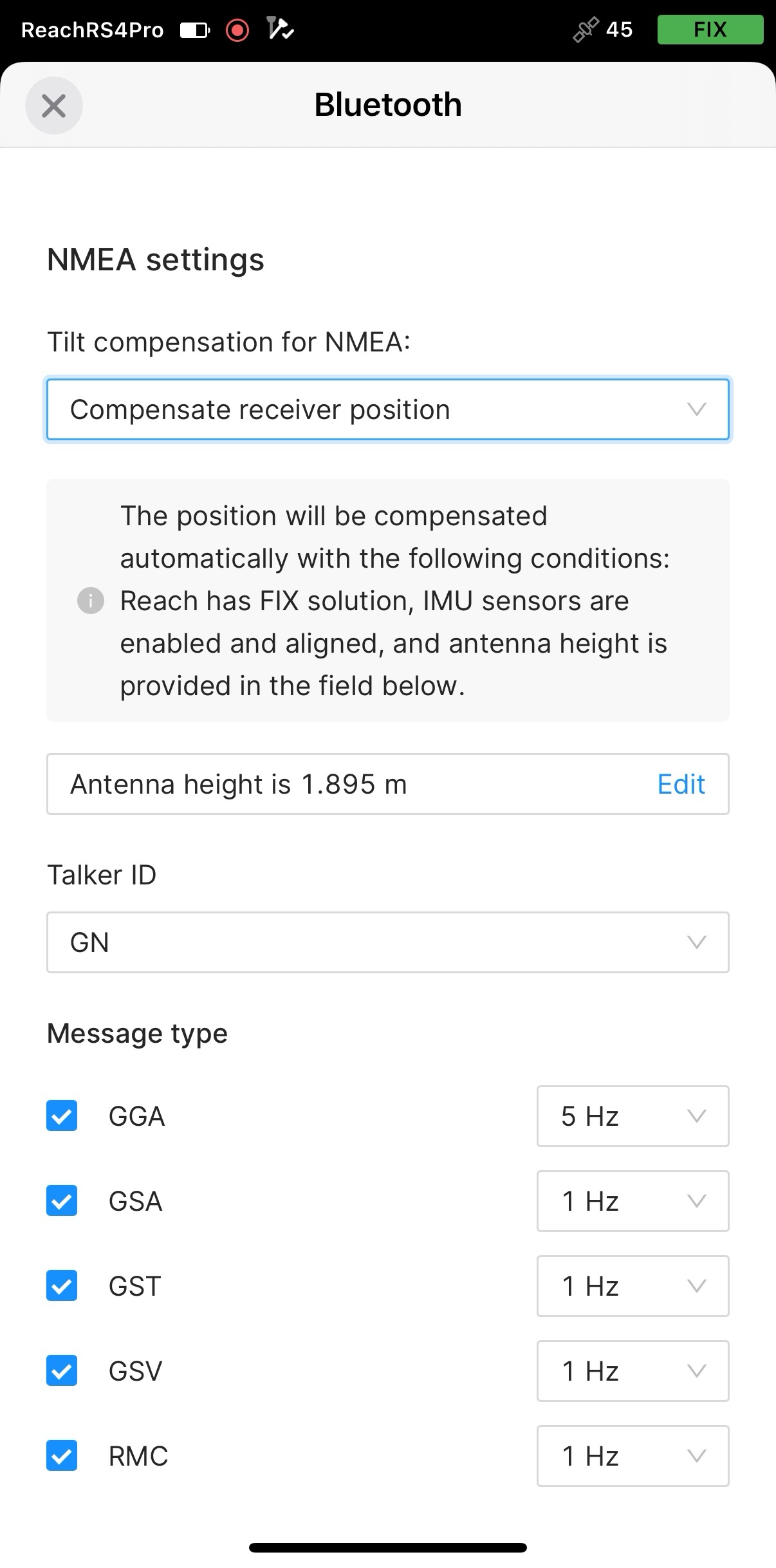
-
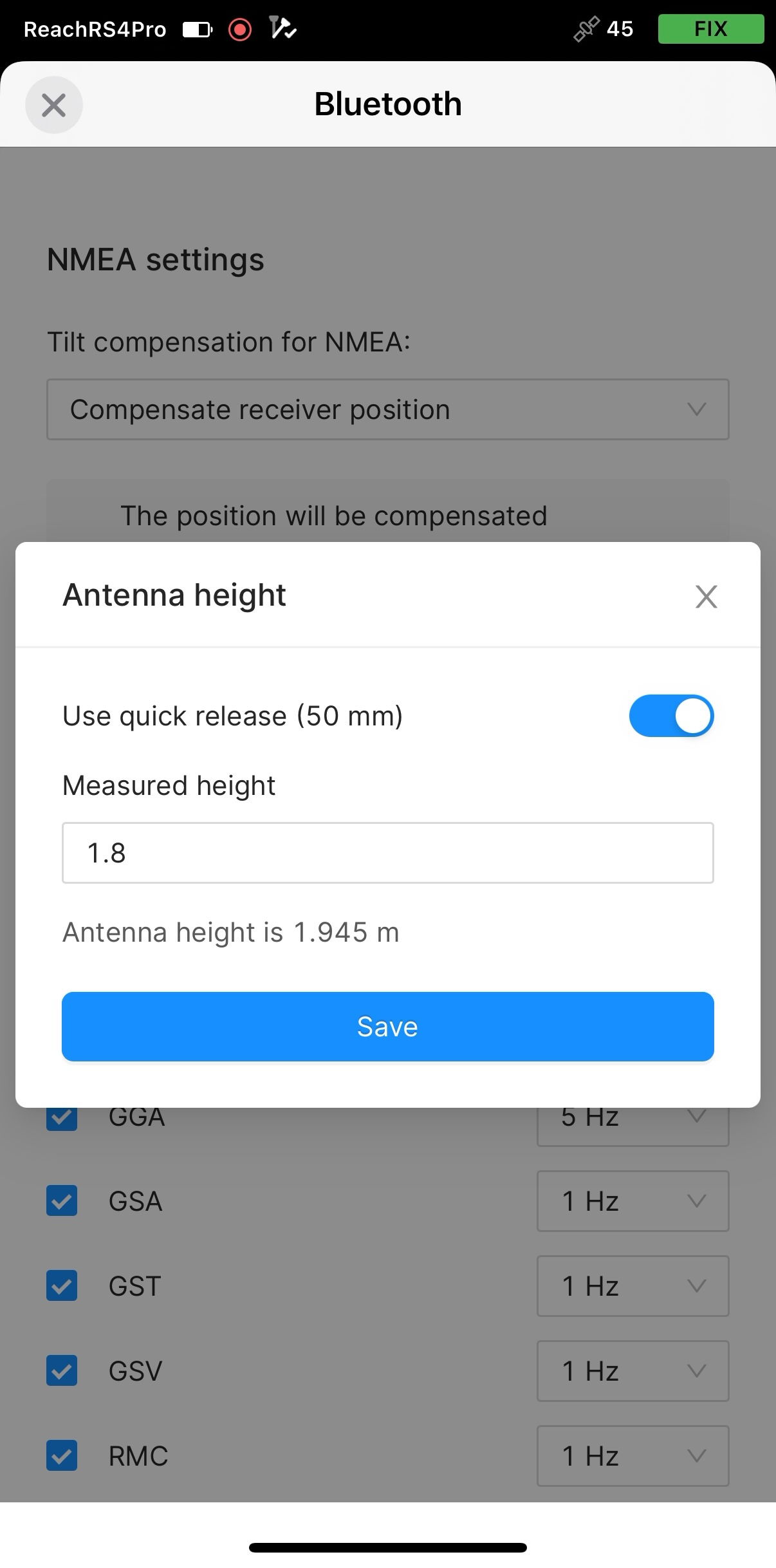
Impostare l'altezza antenna. È sufficiente inserire l'altezza del palo. Emlid Flow applica automaticamente l'offset del centro di fase dell'antenna e regola le misurazioni di conseguenza.
attenzioneQuando si inviano messaggi NMEA compensati, impostare l'altezza antenna solo in Emlid Flow. Impostarla anche in app di terze parti potrebbe causare discrepanze.
suggerimentoSe si utilizza un sistema di sgancio rapido, attivare l'interruttore per includere la sua altezza nel calcolo dell'altezza antenna.
Ora è possibile iniziare a ricevere la posizione corretta in un'applicazione GIS o di raccolta dati di terze parti.
Associare Reach RS4 e il dispositivo Android
Per trovare il proprio Reach RS4 nell'elenco dei dispositivi in Mergin Maps, è necessario abbinarlo al dispositivo Android come segue:
-
Andare alla schermata di configurazione Bluetooth sul proprio dispositivo Android e abilitare il Bluetooth.
-
Attendere che il proprio Reach RS4 venga elencato come dispositivo disponibile.
suggerimentoTenere il Reach a pochi metri dal dispositivo.
-
Toccare il nome del proprio Reach nell'elenco dei dispositivi disponibili sul dispositivo Android.
noteSe il dispositivo richiede un codice PIN, inserire 123456.
-
Accoppiare il Reach con il dispositivo Android.
Configurare la comunicazione tra Mergin Maps e Reach RS4 / RS4 Pro
Per impostare la comunicazione tra Mergin Maps e il proprio ricevitore, seguire questi passaggi:
-
Aprire l'app Mergin Maps e creare un account, se non se ne possiede già uno, per accedere all'app.
-
Aprire o creare un nuovo progetto.
-
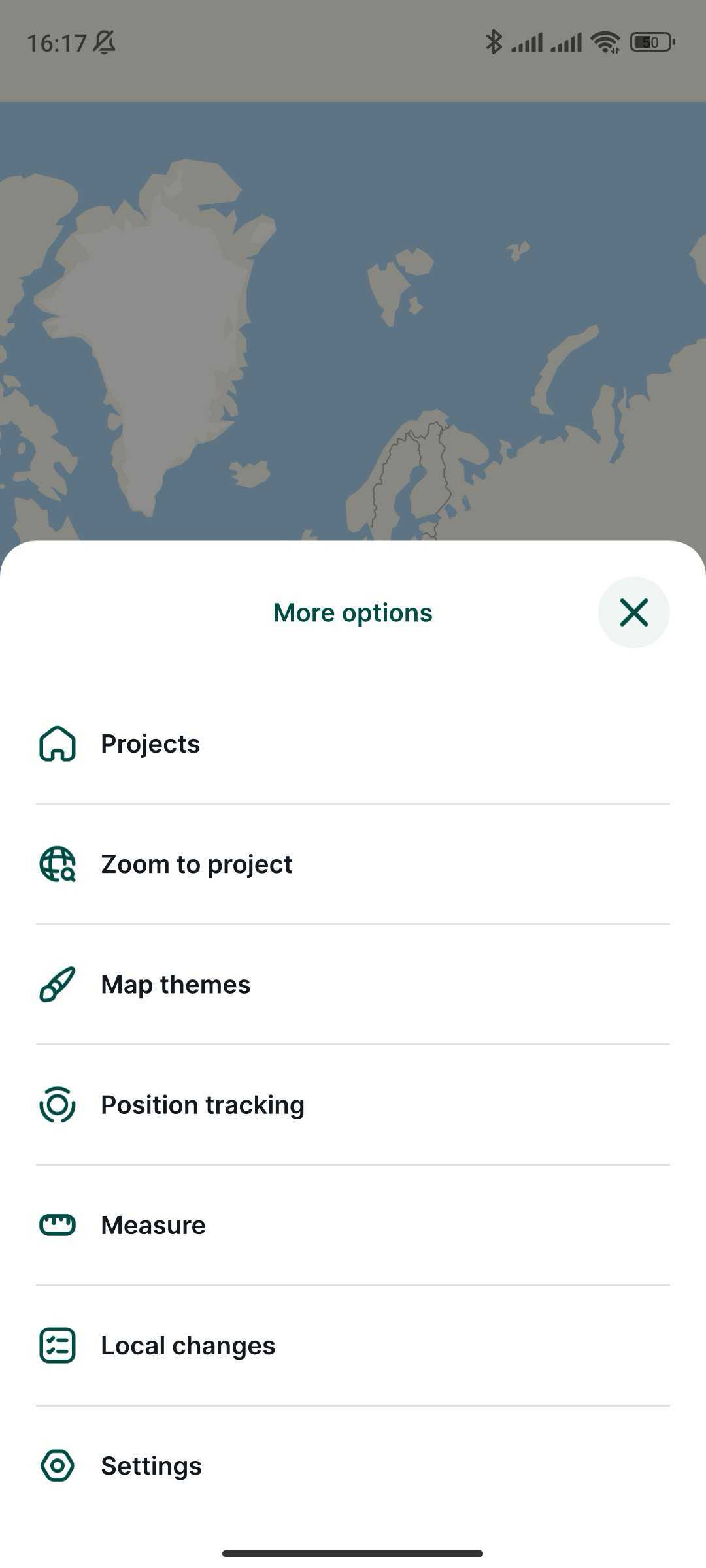
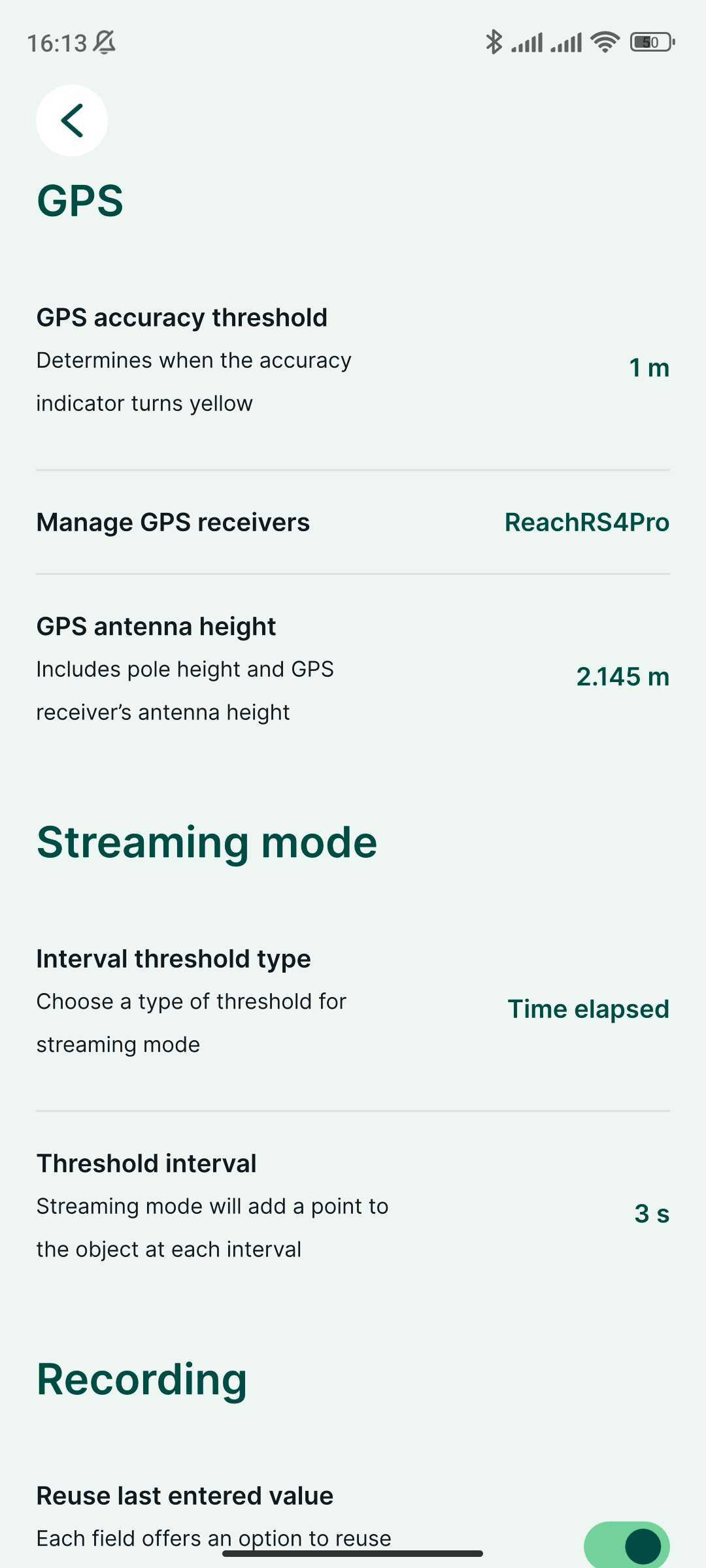
Nella schermata aperta, nell'angolo in basso a destra, toccare More (Altro) e Settings (Impostazioni).
-
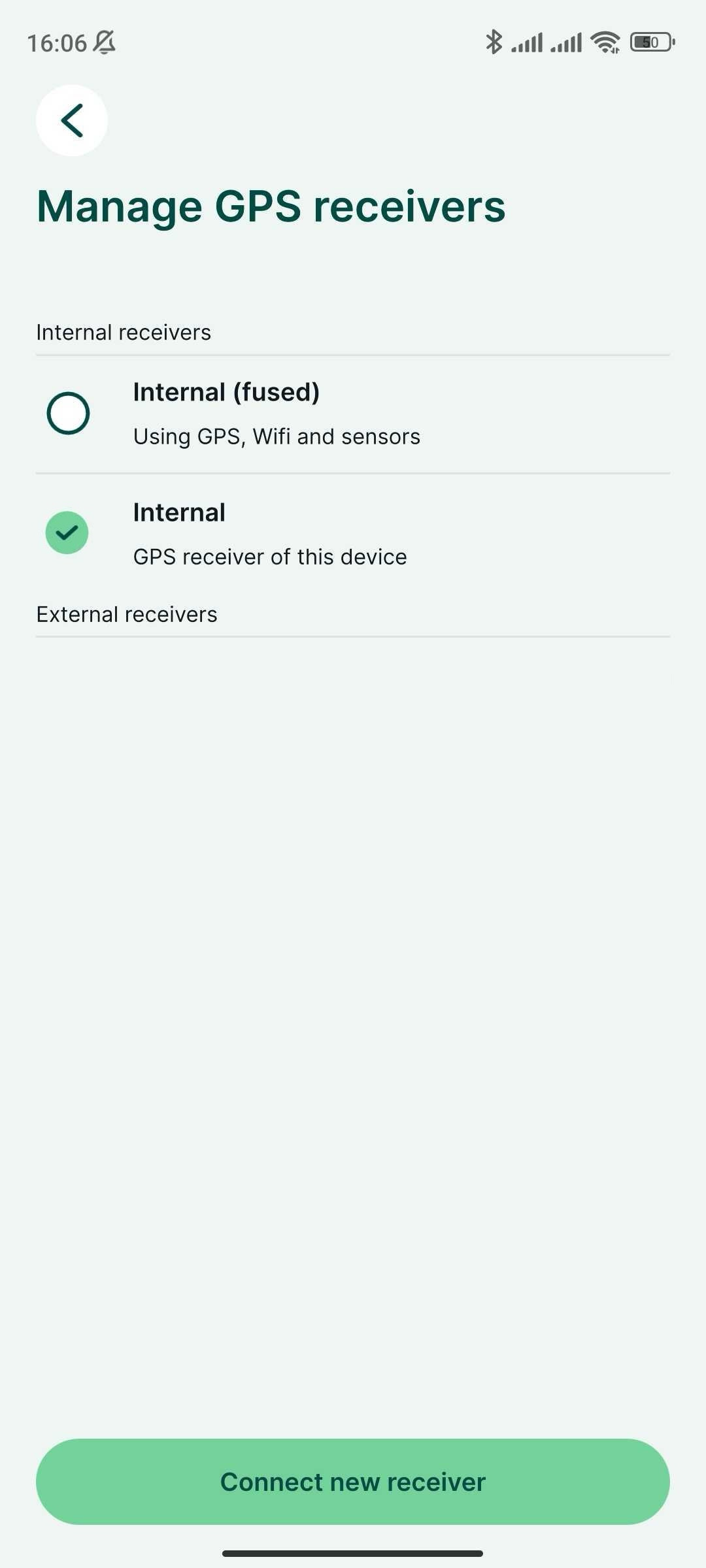
In Settings (Impostazioni), toccare Manage GPS receiver (Gestione ricevitore GPS).
-
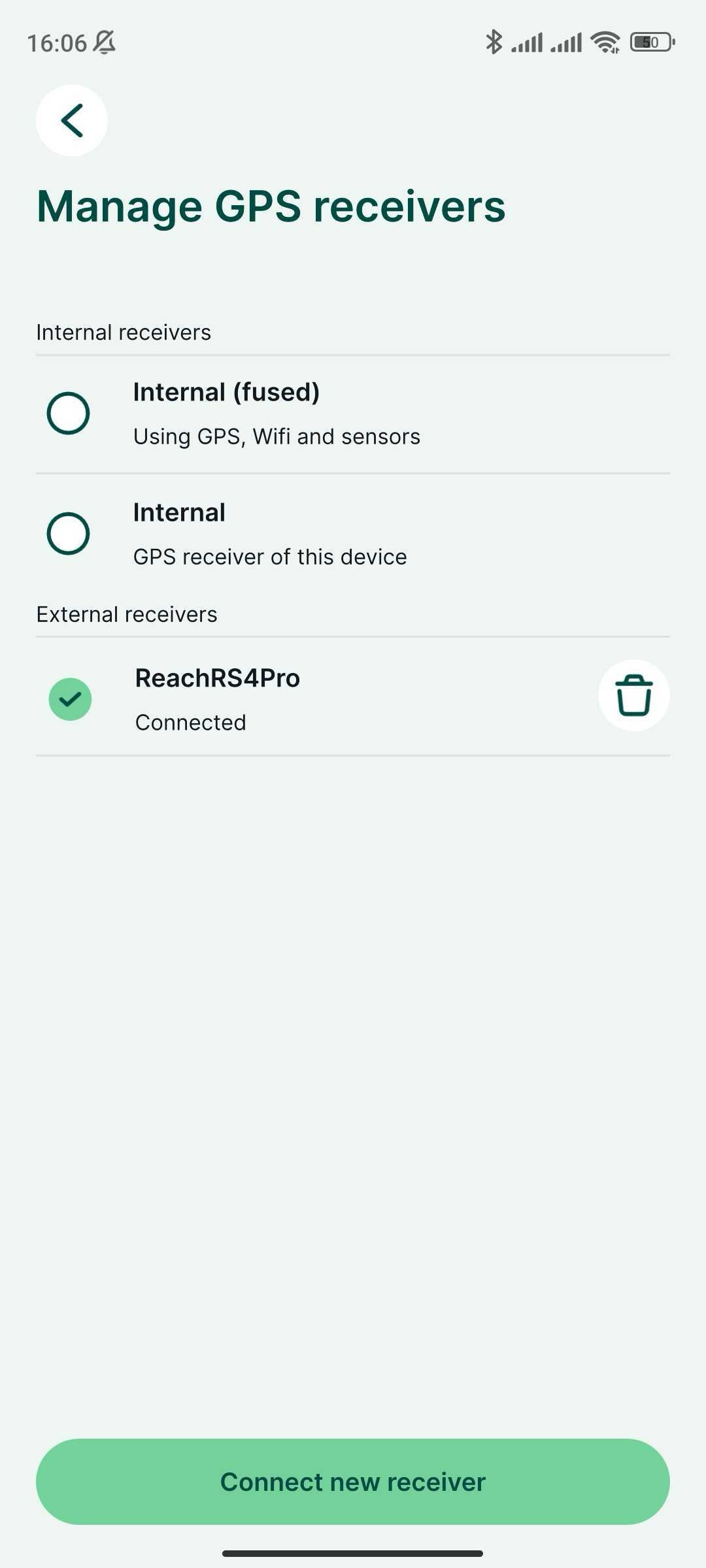
Toccare Connect new receiver (Connetti nuovo ricevitore).
-
Scegliere il ricevitore GPS dall'elenco dei dispositivi Bluetooth e attendere che sia connesso.
-
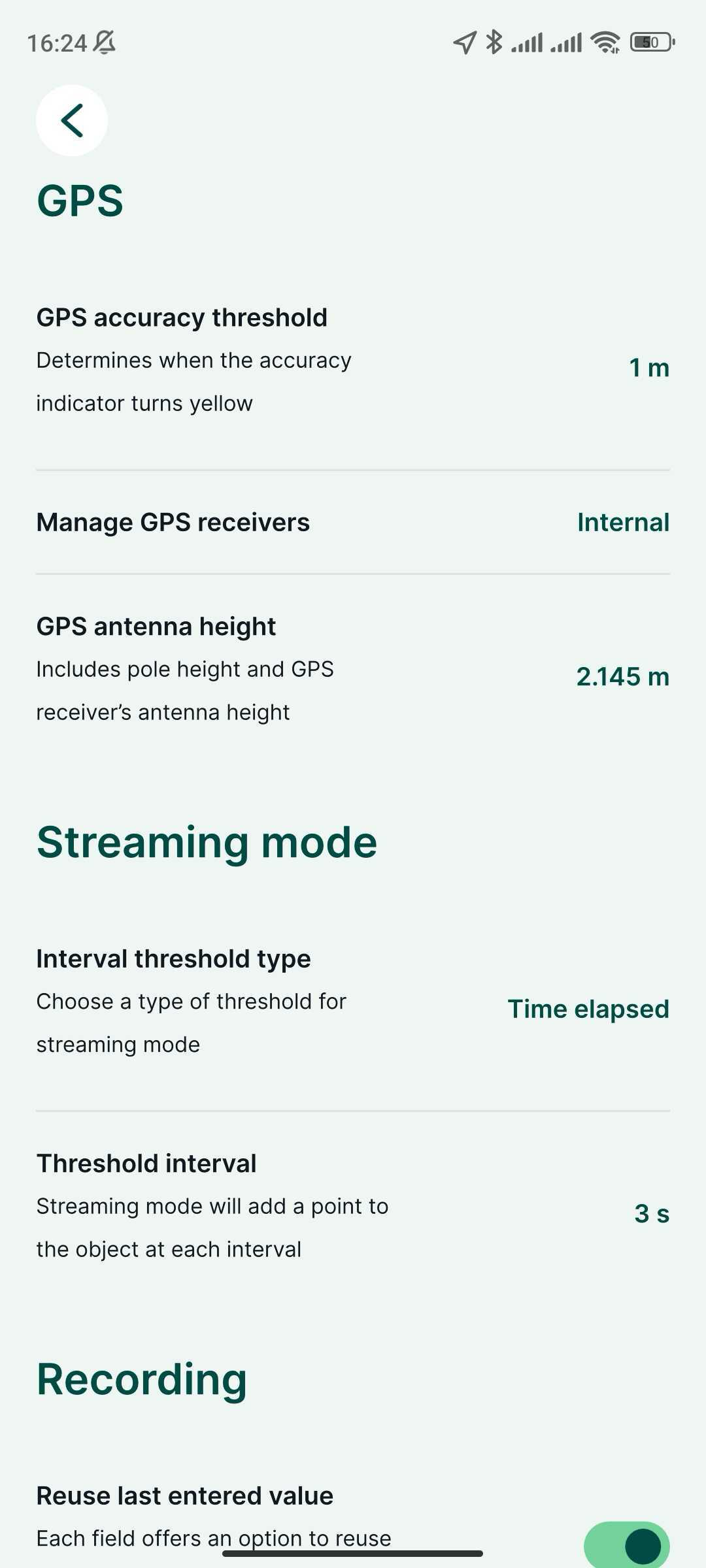
Questo passaggio è richiesto solo quando non si trasmette una posizione NMEA compensata. Tornare a Settings (Impostazioni) e impostare l'altezza dell'antenna. L'offset dell'antenna non viene aggiunto automaticamente in Mergin Maps. Il valore inserito deve essere la somma dell'altezza del palo e di 95 mm, più il sistema di sgancio rapido (50 mm) se utilizzato.
-
Andare alla scheda GPS e controllare lo stato RTK e la precisione sulla mappa. Per controllare le informazioni GPS dettagliate, toccare nuovamente la scheda.

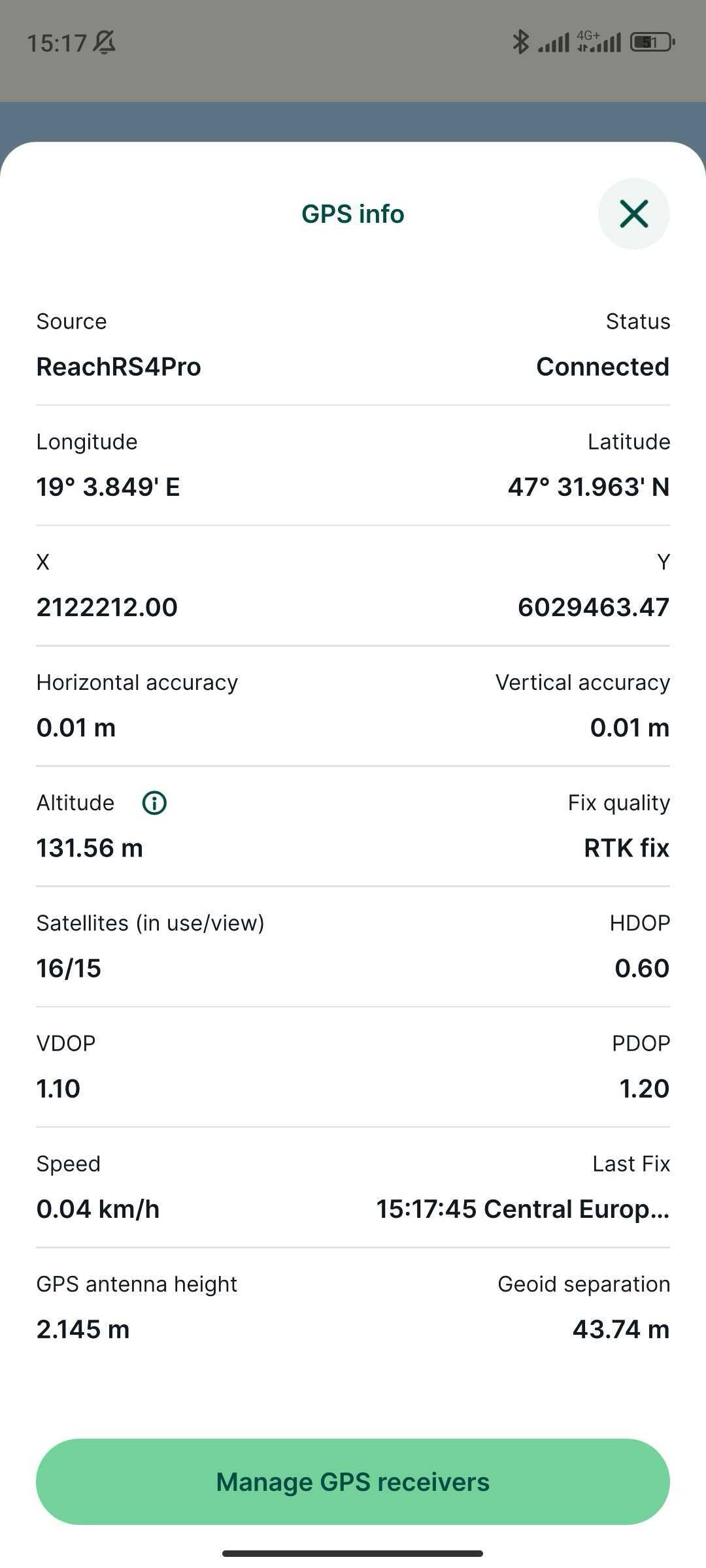
Ora si è pronti per iniziare a raccogliere i dati!