Intégration de Reach RS4 avec Mergin Maps pour Android
Ce tutoriel fournit des instructions étape par étape sur la manière d'intégrer votre Reach RS4 avec Mergin Maps pour Android via Bluetooth.
Vue d'ensemble
Mergin Maps est une application mobile pour appareils Android qui vous permet de collecter, partager et publier des géodonnées et de collaborer avec des équipes en utilisant la synchronisation instantanée avec QGIS.
Pour intégrer votre Reach RS4 avec Mergin Maps via Bluetooth, vous aurez besoin des éléments suivants :
- Reach RS4
remarque
Assurez-vous que votre récepteur Reach fonctionne avec la version 34.4 du micrologiciel ou une version ultérieure pour transmettre des messages NMEA compensés via Bluetooth.
- Un appareil sur Android
- L'application mobile Mergin Maps installée sur votre appareil Android
- Un compte Mergin Maps
Flux de travail
Pour intégrer votre Reach RS4 avec Mergin Maps, suivez les étapes ci-dessous.
Accédez à Reach en utilisant Emlid Flow
Vous pouvez vous connecter à votre Reach de deux manières :
- En utilisant l'option de connexion BLE. En utilisant l'option de connexion BLE. Il s'agit de la méthode de connexion recommandée. Elle est particulièrement utile lorsque vous travaillez avec des corrections provenant d'un fournisseur NTRIP. Dans cette mise en place, le récepteur utilise la connexion Internet de votre appareil mobile. Il vous suffit donc de sélectionner l'option NTRIP via BLE lors de la configuration de l'entrée de correction du récepteur.
- En utilisant l'option de connexion Wi-Fi. Dans ce cas, votre appareil et Reach doivent être dans le même réseau Wi-Fi.
Pour vous connecter à votre Reach, suivez les étapes ci-dessous :
- Bluetooth connection
- Hotspot connection
-
Activez le Bluetooth sur votre smartphone ou tablette.
-
Ouvrez Emlid Flow. Lorsque vous y êtes invité, appuyez sur Configure access (Configurer l'accès) et autorisez les permissions de localisation. Cela est nécessaire pour la pleine fonctionnalité du récepteur.
Après avoir accordé les permissions, votre récepteur apparaîtra dans la liste. L'application se connectera automatiquement.
-
Allez dans les Wi-Fi settings (Paramètres Wi-Fi) de votre appareil.
-
Se connecter au point d'accès Reach. Il apparaît sous le nom reach:XX:XX.
-
Saisissez le mot de passe du réseau. Le mot de passe par défaut est emlidreach. Si vous l'avez précédemment changé, saisissez votre mot de passe personnalisé à la place.
remarquePour restaurer le mot de passe Wi-Fi par défaut, emlidreach, vous devez reprogrammer le récepteur. Notez que la reprogrammation efface tous les enregistrements stockés sur le récepteur et rétablit tous les paramètres à leurs valeurs par défaut.
-
Ouvrez Emlid Flow et connectez-vous à votre Reach.
Pour plus d'informations sur la connexion à votre appareil Reach, consultez le guide Connexion à Reach. Une connexion Bluetooth est la méthode recommandée.
Le nom de Reach est affiché juste au-dessus de son adresse MAC. Dans ce guide, nous avons utilisé l'unité nommée Reach.
Configuration des corrections dans Emlid Flow
Consultez les guides suivants pour configurer la réception des corrections sur votre rover Reach RS4/RS4 Pro :
- Comment configurer le RTK sur le service NTRIP
- Comment travailler avec une base tierce via radio UHF
- Comment configurer RTK sur la radio LoRa
Configuration de la connexion Bluetooth dans Emlid Flow
Activez la visibilité Bluetooth, afin que votre appareil puisse être détecté par d'autres appareils. Pour ce faire, suivez les étapes ci-dessous :
-
Allez dans Settings (Paramètres) dans Emlid Flow et appuyez sur Bluetooth.
-
Appuyez sur Discoverability (Visibilité) et activez l'option Discoverability (Visibilité). Appuyez sur Save (Enregistrer) pour appliquer les modifications.
Activation de la compensation d'inclinaison
Le Reach RS4/RS4 Pro prend en charge la compensation d'inclinaison basée sur l'IMU, vous permettant de collecter et d'effectuer une implantation de points même lorsque la perche d'arpentage est inclinée. Le logiciel calcule l'angle de l'inclinaison et la distance pour déterminer la position de la pointe du jalon au sol. Pour activer la compensation d'inclinaison, suivez le guide Comment activer la compensation d'inclinaison.
Configuration du flux NMEA dans Emlid Flow
Pour envoyer des données de position à des applications externes, configurez la diffusion de position au format NMEA comme suit :
-
Dans Emlid Flow, allez dans Settings (Paramètres).
-
Appuyez sur Position streaming 1 (Diffusion de position 1) et sélectionnez Bluetooth.
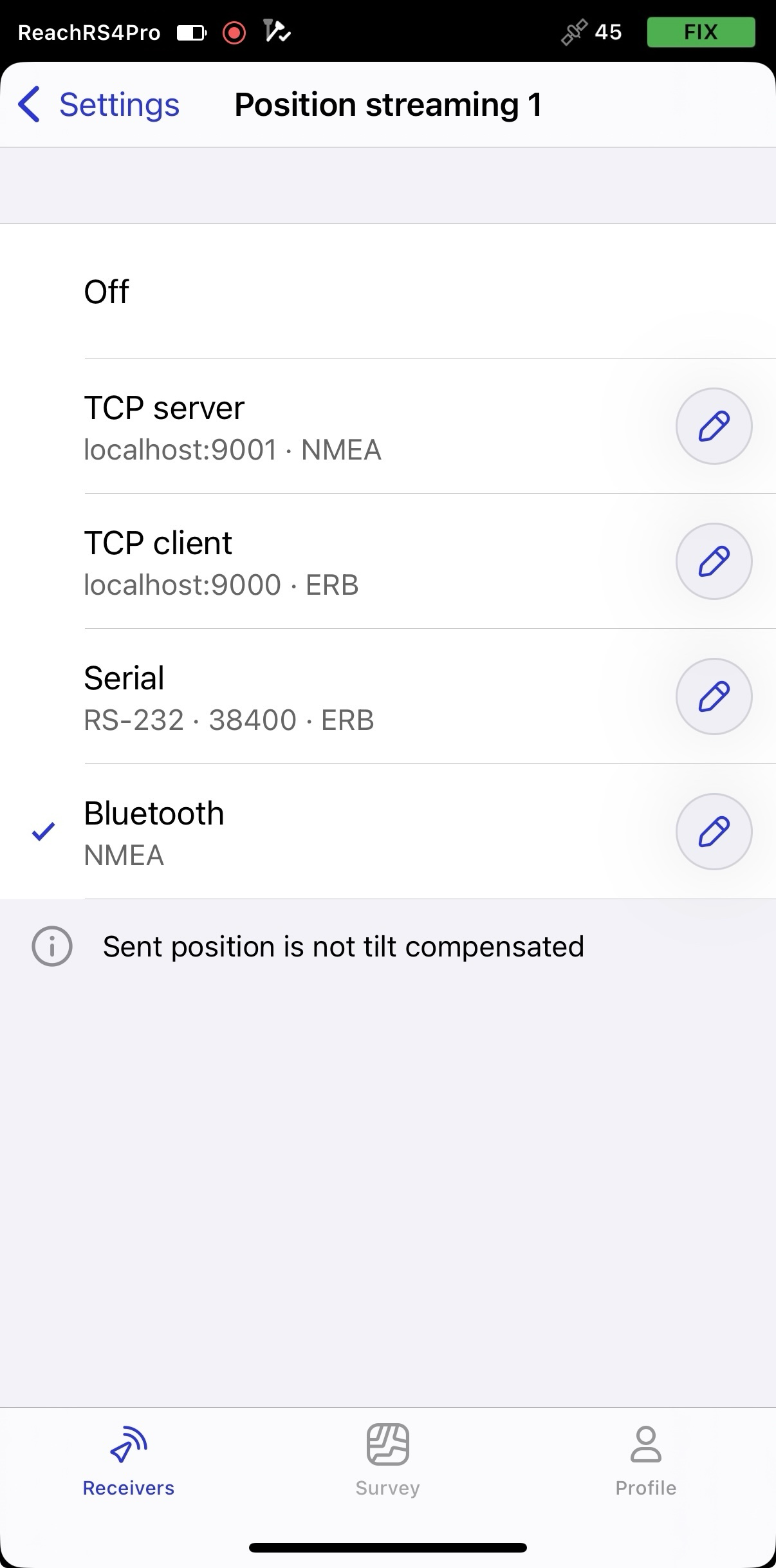
-
Pour configurer la diffusion de position, appuyez sur le bouton Edit (Modifier) dans la case Bluetooth.
remarqueLorsque vous êtes connecté �à votre Reach via Bluetooth, Emlid Flow vous invitera à vous connecter au point d'accès Reach pour accéder aux paramètres de configuration de diffusion.
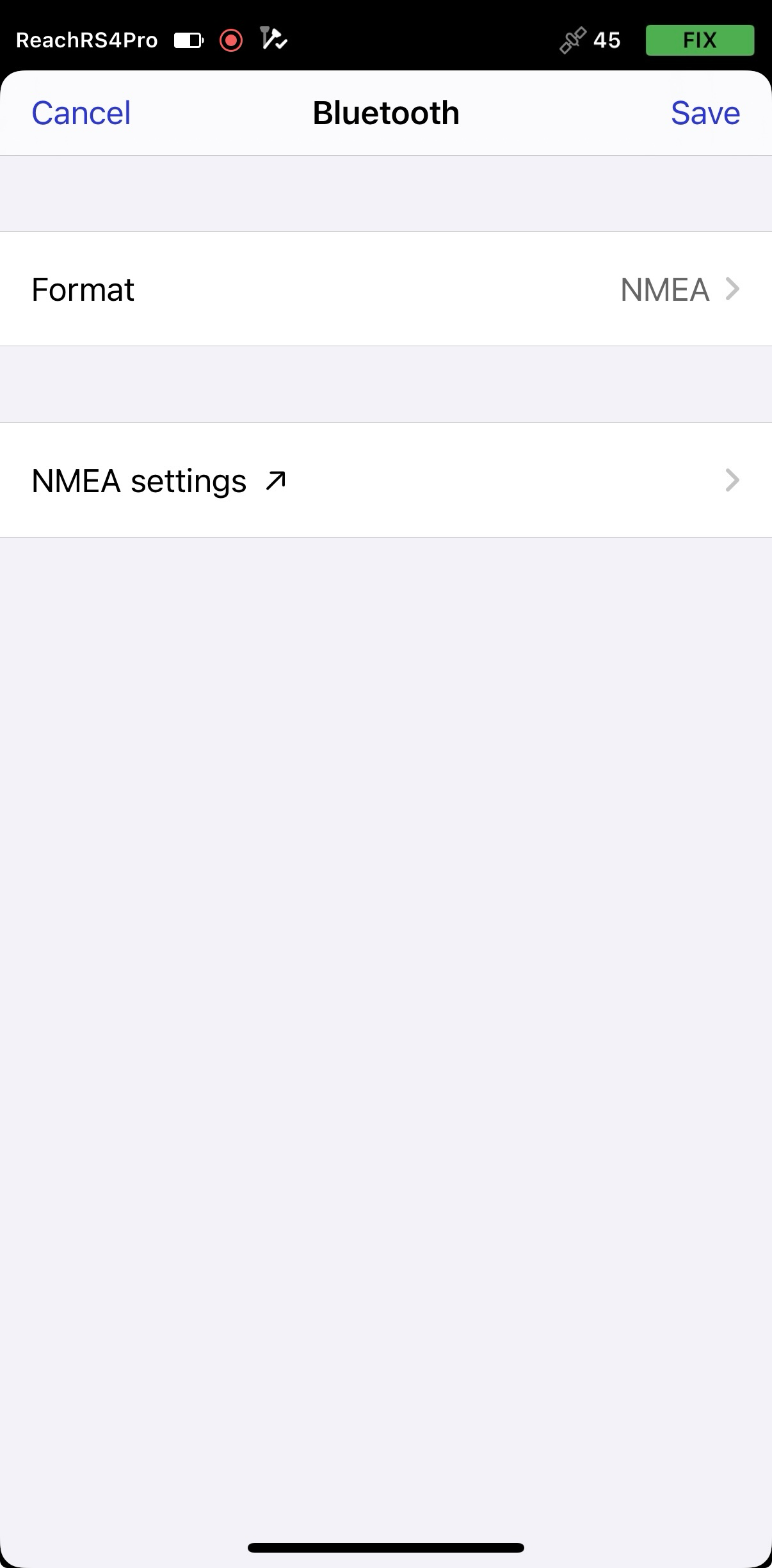
-
Appuyez sur Format et choisissez NMEA.
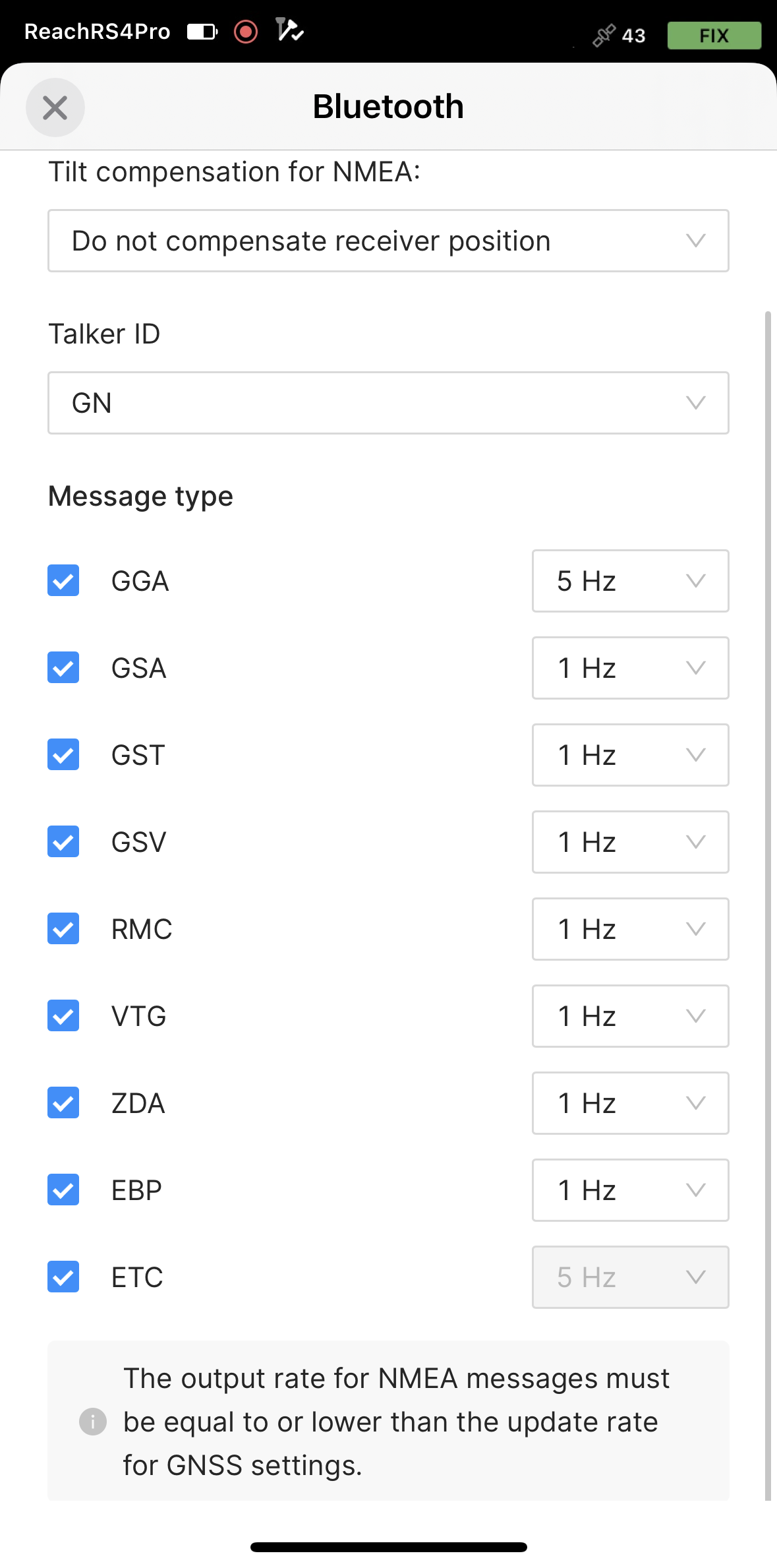
-
Appliquez les changements nécessaires.
-
Pour envoyer des messages NMEA compensés, vous devez l'activer dans Emlid Flow.
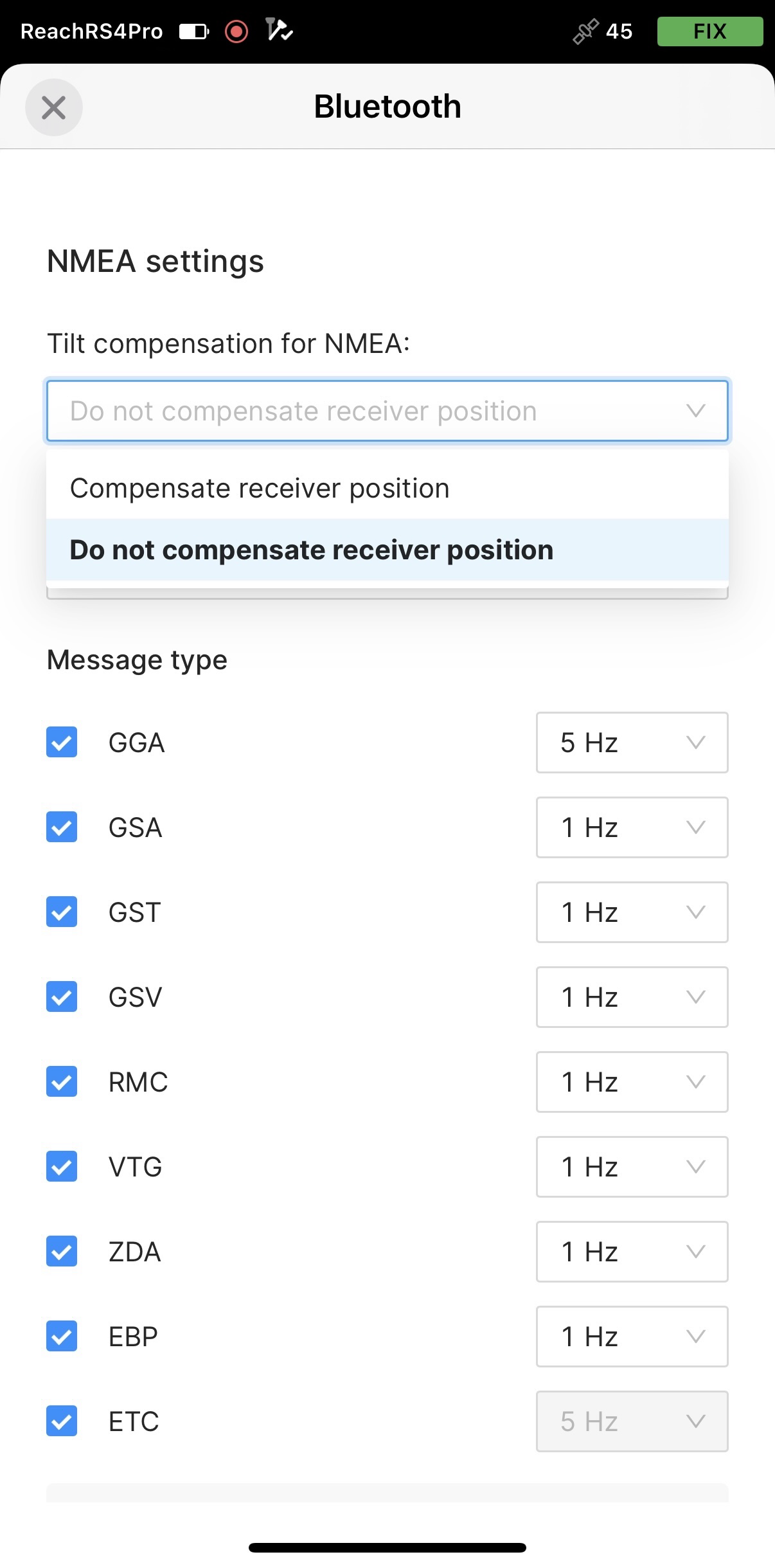
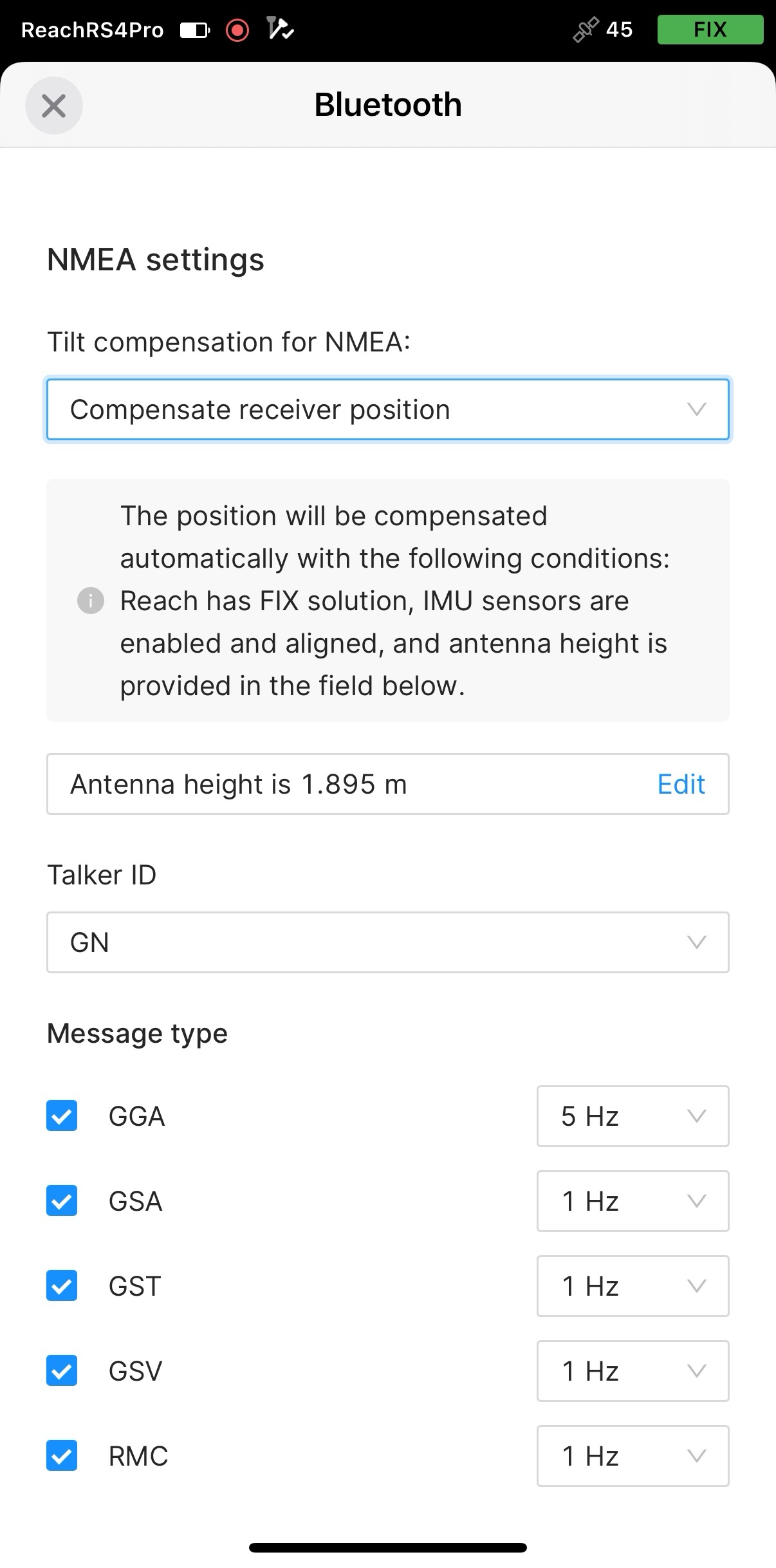
-
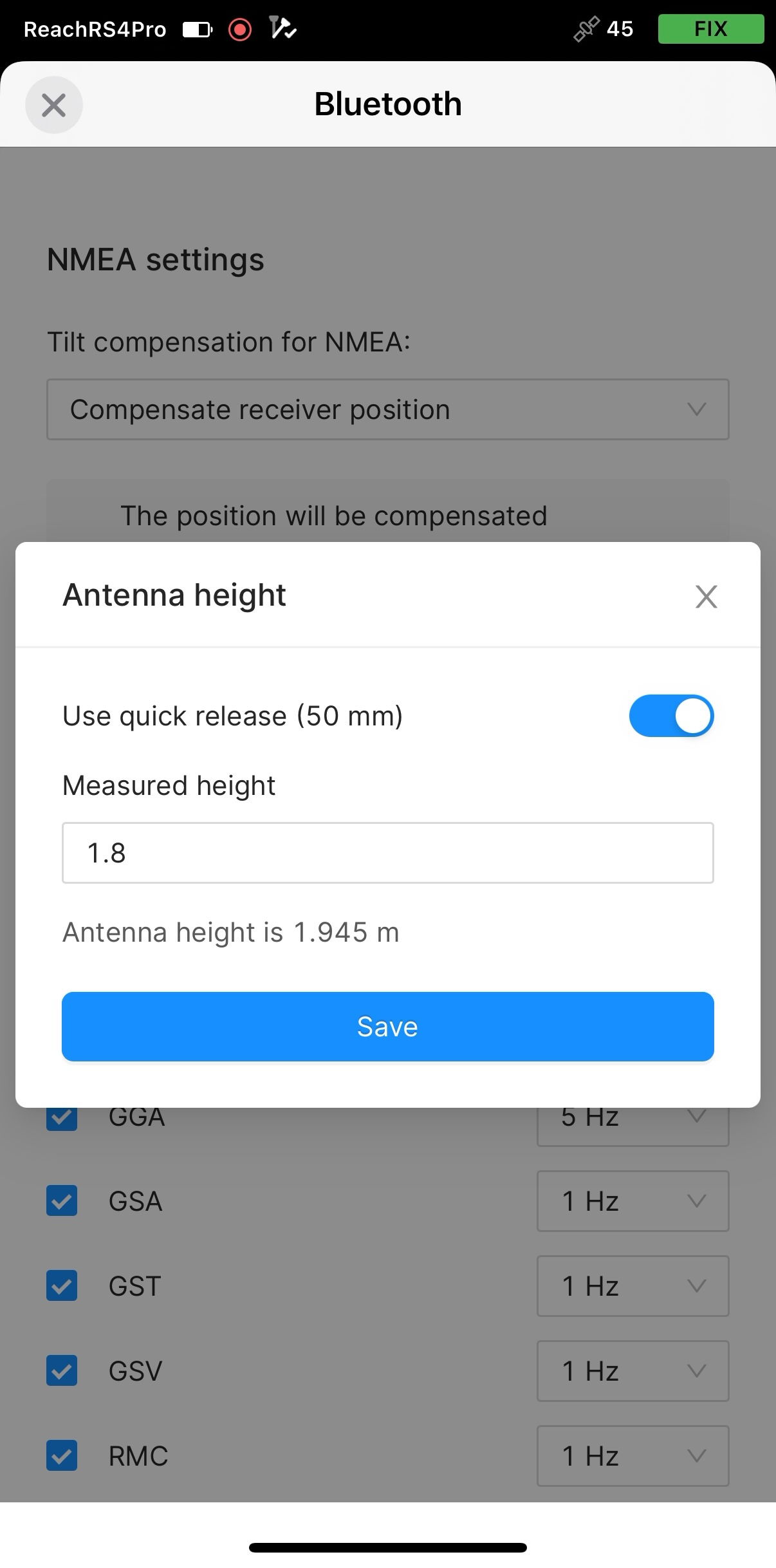
Réglez la hauteur de l'antenne. Vous devez uniquement saisir la hauteur du jalon. Emlid Flow applique automatiquement le décalage du centre de phase de l'antenne et ajuste les mesures en conséquence.
attentionLors de l'envoi de messages NMEA compensés, réglez la hauteur de l'antenne uniquement dans Emlid Flow. La configurer également dans les applications tierces peut entraîner des écarts.
astuceSi vous utilisez un démontage rapide, activez l'interrupteur pour inclure sa hauteur dans le calcul de la hauteur de l'antenne.
Vous pouvez maintenant commencer à recevoir la position corrigée dans une application GIS tierce ou de collecte de données.
Appairage de Reach RS4 et de l'appareil Android
Pour trouver votre Reach RS4 dans la liste des appareils dans Mergin Maps, vous devez l'appairer avec l'appareil Android comme suit :
-
Accédez à l'écran de configuration Bluetooth de votre appareil Android et activez Bluetooth.
-
Attendez que votre Reach RS4 soit listé comme appareil disponible.
astuceGardez Reach à quelques mètres de l'appareil.
-
Appuyez sur le nom de votre Reach dans la liste des appareils disponibles sur l'appareil Android.
remarqueSi votre appareil nécessite un code PIN, entrez 123456.
-
Appairez Reach avec l'appareil Android.
Configuration de la communication entre Mergin Maps et Reach RS4 / RS4 Pro
Pour configurer la communication entre Mergin Maps et votre récepteur, suivez les étapes ci-dessous :
-
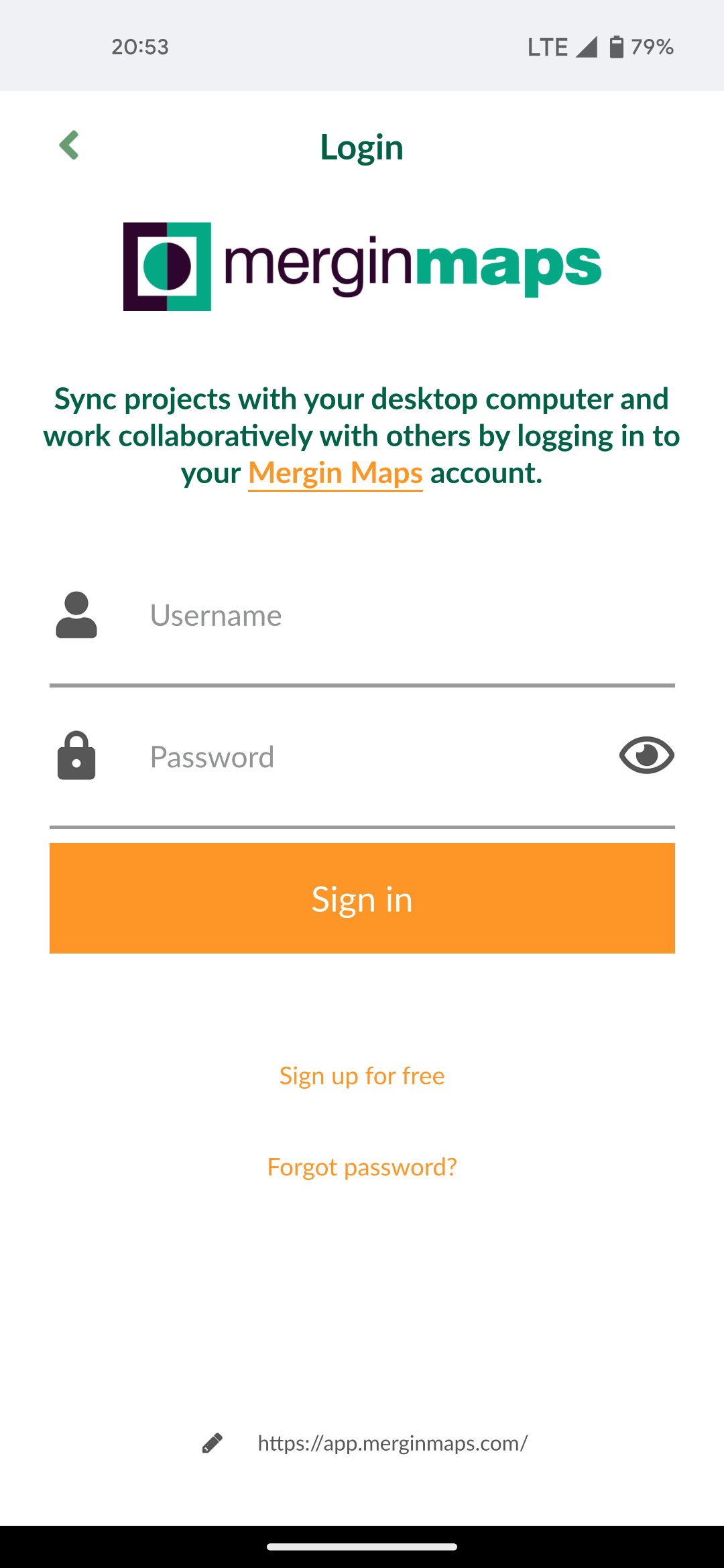
Ouvrez l'application Mergin Maps et créez un compte si vous n'en avez pas encore pour accéder à l'application.
-
Ouvrez ou créez un nouveau projet.
-
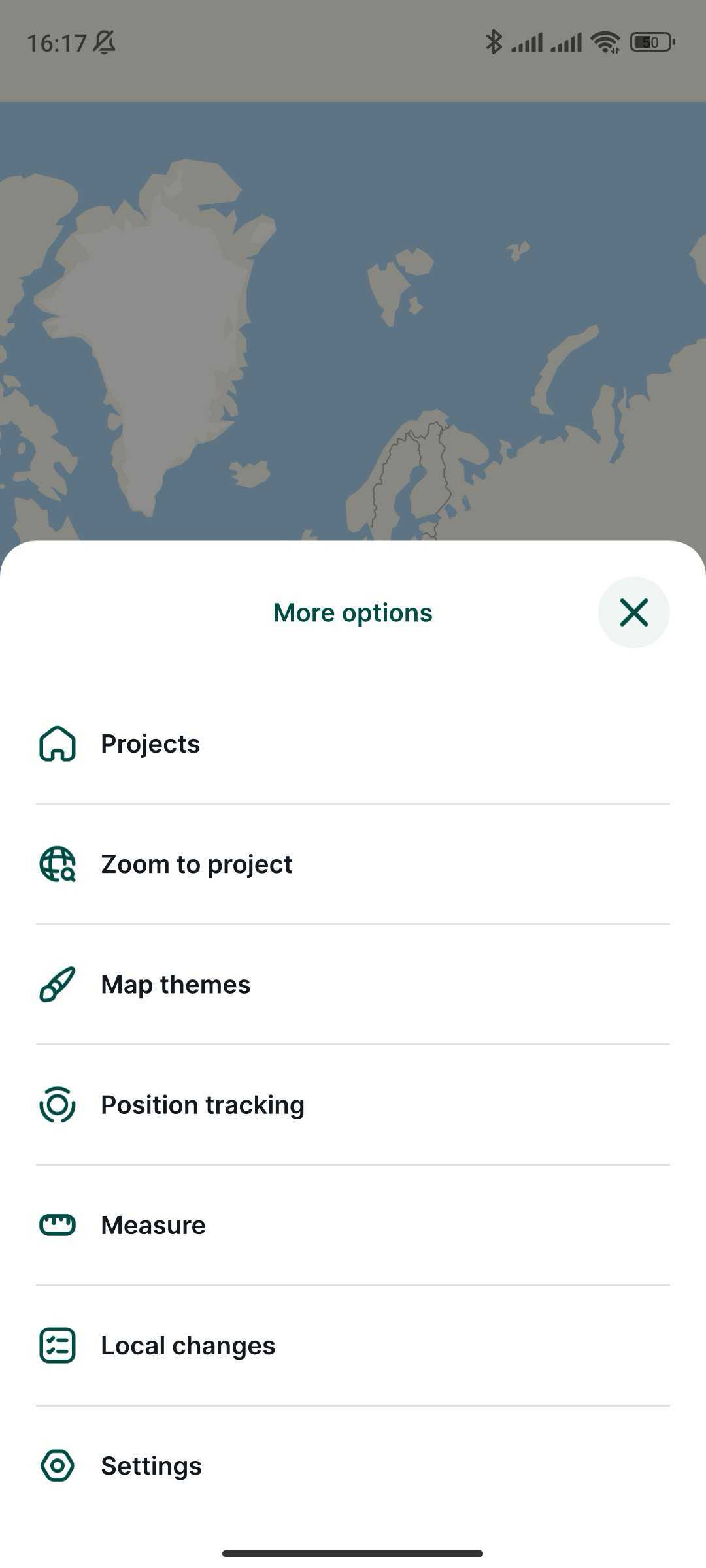
Sur l'écran ouvert, dans le coin inférieur droit, appuyez sur More (Plus) et Settings (Paramètres).
-
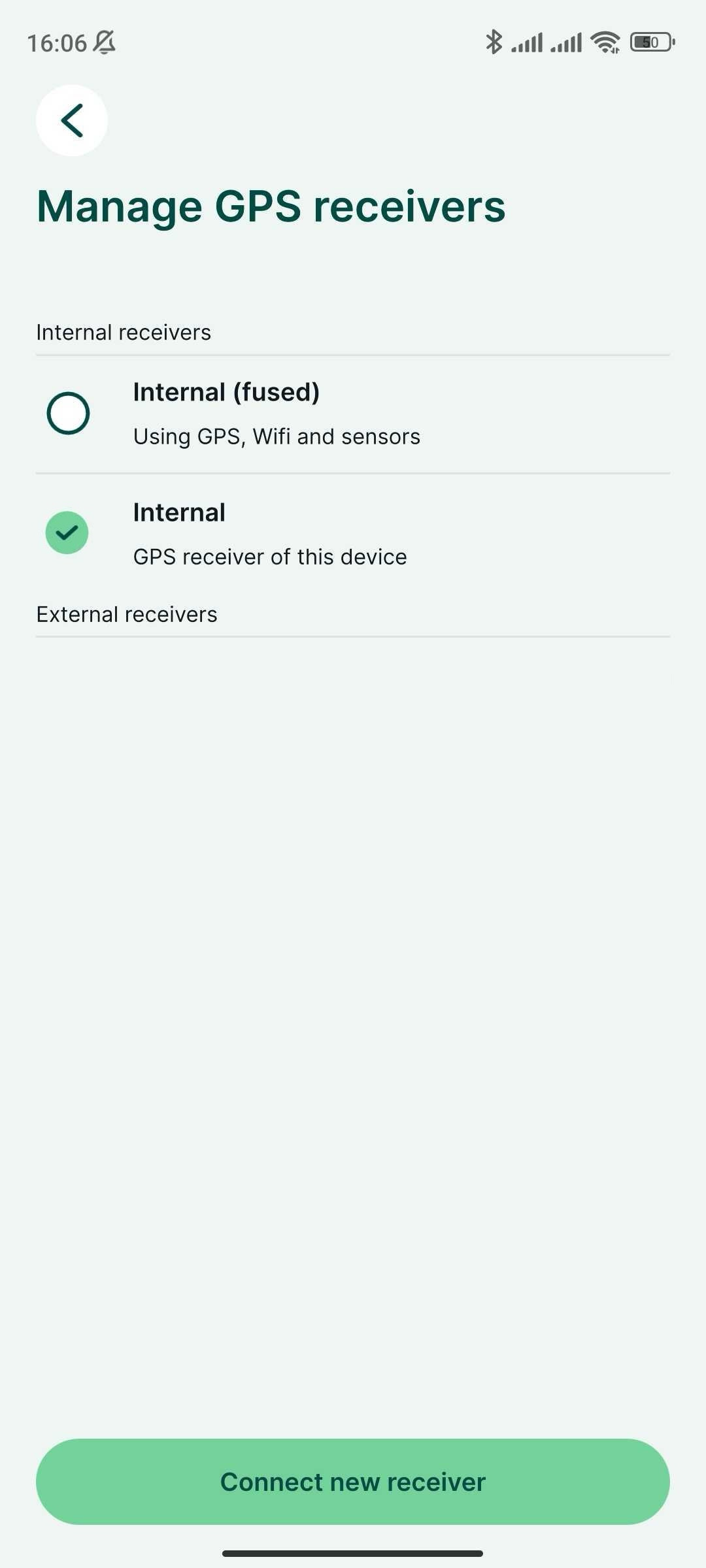
Dans Settings (Paramètres), appuyez sur Manage GPS receivers (Gérer les récepteurs GPS).
-
Appuyez sur Connect new receiver (Connecter un nouveau récepteur).
-
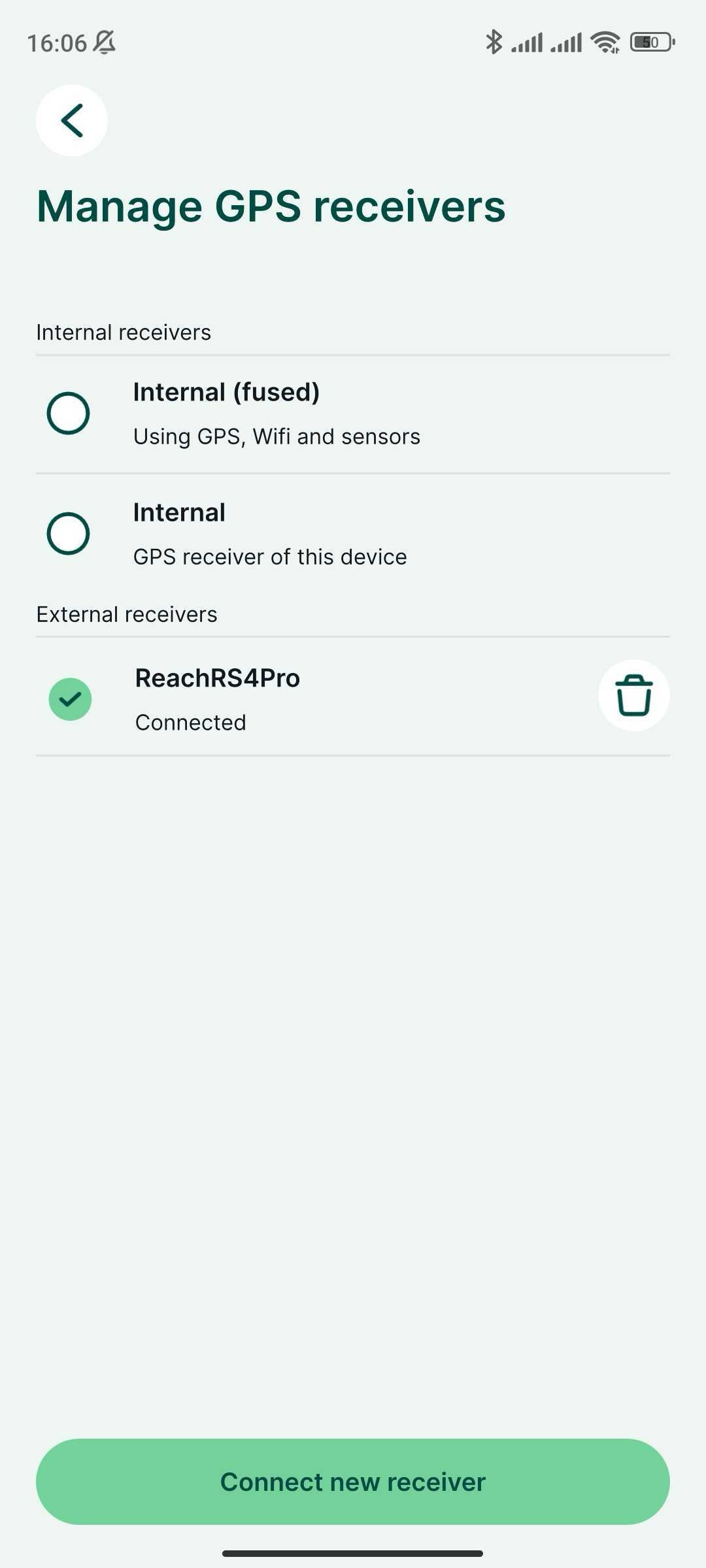
Choisissez votre récepteur GPS dans la liste des appareils Bluetooth et attendez qu'il soit connecté.
-
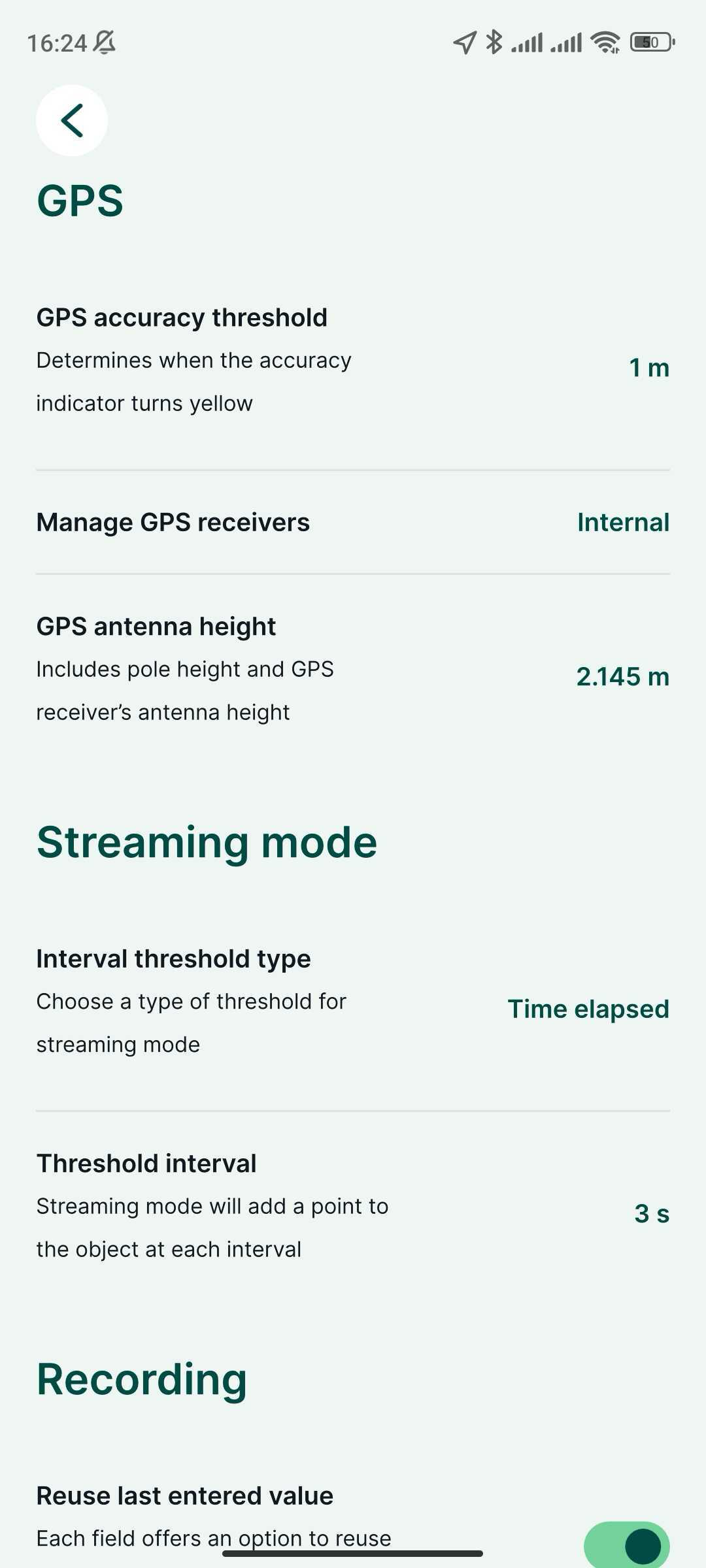
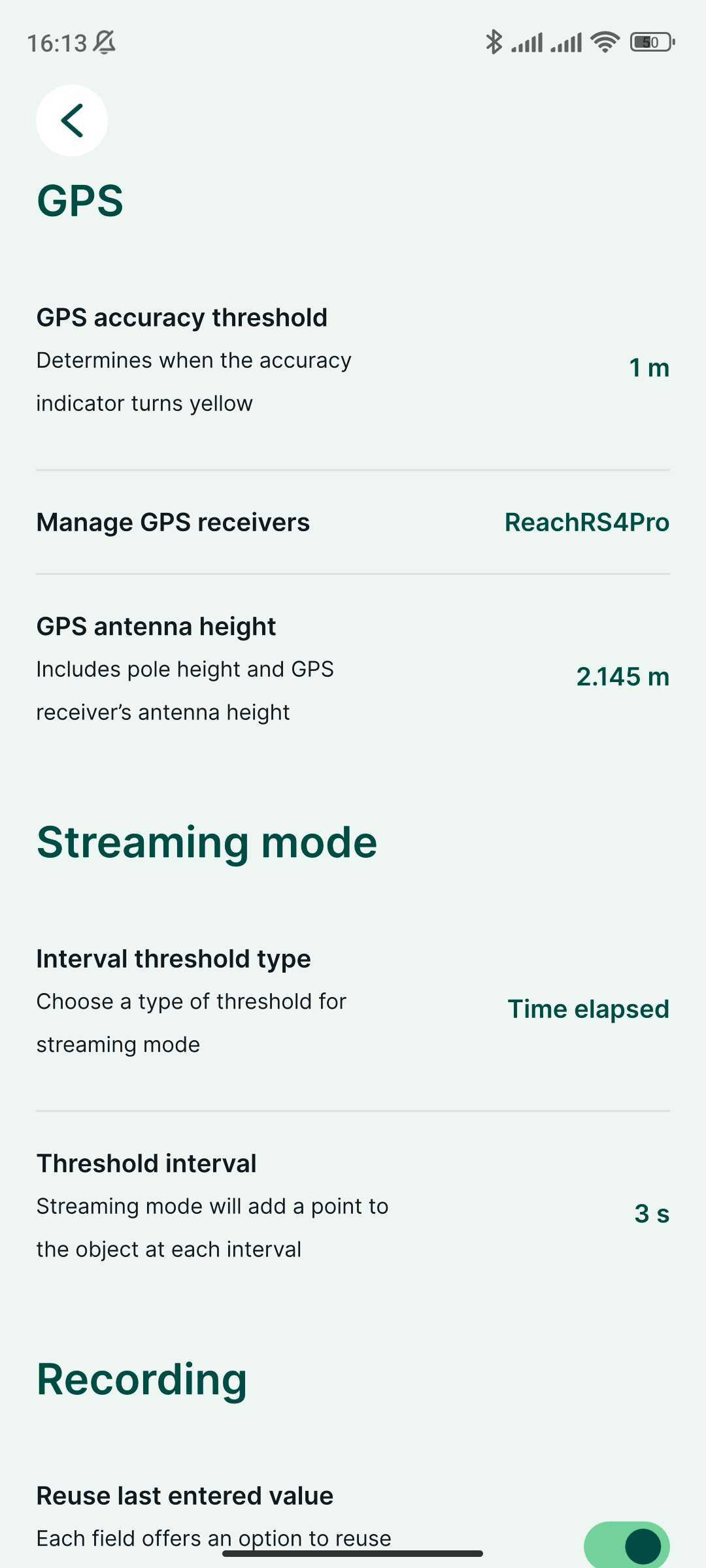
Cette étape n'est requise que lorsque vous ne diffusez pas de position NMEA compensée. Retournez dans Settings (Paramètres) et définissez la hauteur de l'antenne. Le décalage de l'antenne n'est pas ajouté automatiquement dans Mergin Maps. La valeur que vous saisissez doit être la somme de la hauteur du jalon et de 95 mm, plus le démontage rapide (50 mm) si vous l'utilisez.
-
Allez dans l'onglet GPS et vérifiez le statut RTK et l'exactitude sur la carte. Pour vérifier les informations GPS détaillées, appuyez de nouveau sur l'onglet.

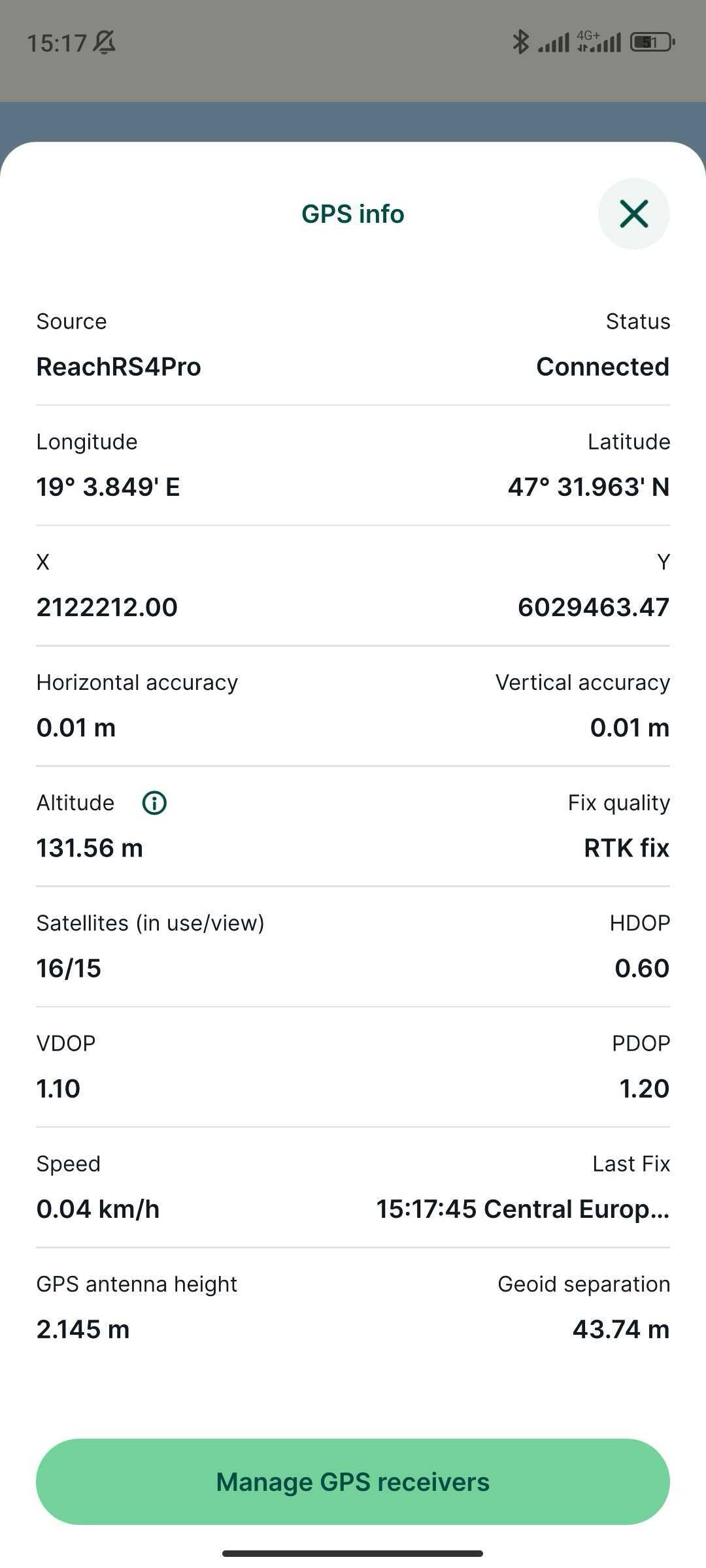
Maintenant, vous êtes prêt à commencer à collecter des données !