Intégration du drone DJI RTK et de la base Reach RS4/RS4 Pro
Ce guide montre comment configurer votre Reach RS4/RS4 Pro comme base pour les drones DJI RTK tels que Phantom 4 RTK, Mavic 3E, et Matrice 300 RTK pour géolocaliser les images de drone pour une cartographie ultérieure dans un logiciel de photogrammétrie.
Apprenez-en plus sur le RTK et le PPK dans les guides ci-dessous:
Vue d'ensemble
Les drones DJI RTK utilisent NTRIP pour recevoir des corrections, ce qui vous permet d'utiliser Reach RS4/RS4 Pro comme station de base. Reach peut envoyer des corrections NTRIP via Emlid Caster à travers internet ou en utilisant l'option NTRIP locale dans Emlid Flow sans connexion internet.
Pour configurer votre Reach RS4/RS4 Pro comme base pour un drone DJI RTK, vous aurez besoin des éléments suivants :
- Drone DJI RTK avec GS RTK ou Pilot 2 comme rover
- Contrôleur
- Reach RS4/RS4 Pro comme base
- Un smartphone ou une tablette avec l'application Emlid Flow installée
- Connexion internet sur les deux appareils si vous utilisez Emlid Caster
- Accès à Emlid Caster
Dans ce guide, nous utiliserons le drone DJI Phantom 4 RTK, mais le processus est le même pour les autres drones DJI RTK.
Tutoriel vidéo
La vidéo ci-dessous couvre le processus de configuration de Reach RS2/RS2+ comme base pour le drone DJI Phantom 4 RTK en utilisant Emlid Caster. La procédure est identique pour le Reach RS4 / RS4 Pro.
Cette vidéo ne couvre pas le processus de configuration de Reach comme base pour le drone DJI Phantom 4 RTK en utilisant l'option NTRIP local. Vous pouvez vérifier ce flux de travail dans la section Configurer Reach RS4/RS4 Pro comme Base ci-dessous.
Tutoriel texte
Le texte ci-dessous couvre le processus de configuration de Reach RS4/RS4 Pro comme base pour un drone DJI RTK en utilisant Emlid Caster via Internet ou l'option NTRIP local dans Emlid Flow.
Configurer le Reach RS4/RS4 Pro comme base
Reach RS4/RS4 Pro peut envoyer des corrections NTRIP via Emlid Caster ou en utilisant l'option NTRIP Locale dans Emlid Flow. La différence est qu'Emlid Caster nécessite une connexion internet, et NTRIP local vous permet de configurer RTK sans connexion internet. Sélectionnez la méthode en fonction de votre cas d'utilisation et suivez les étapes ci-dessous.
Configurer le Reach RS4/RS4 Pro comme base en utilisant le NTRIP Locale
Cette configuration fonctionnera pour votre drone DJI RTK uniquement s'il prend en charge une connexion Wi-Fi.
Pour configurer votre Reach comme base pour le drone DJI RTK en utilisant l'option NTRIP local dans Emlid Flow, suivez les étapes ci-dessous :
-
Placez votre Reach sur le trépied et assurez-lui une vue dégagée du ciel.
astuceApprenez-en plus sur le placement et la mise en place de la base dans les articles Placement et Choisir la méthode de configuration de la base.
-
Ouvrez Emlid Flow et connectez-vous à votre Reach.
-
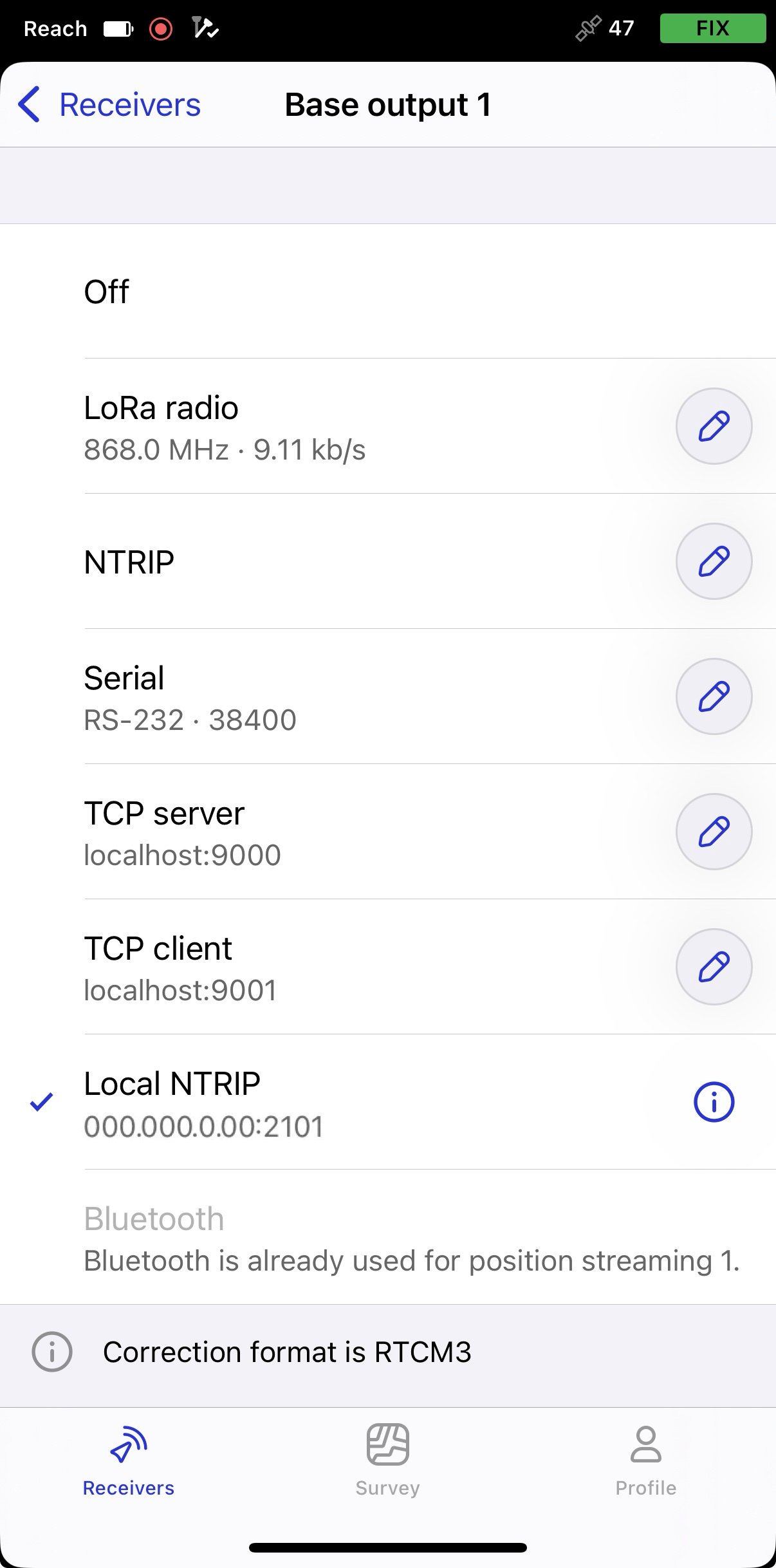
Appuyez sur Base output (Sortie de base) et sélectionnez l'option Local NTRIP (NTRIP local).
-
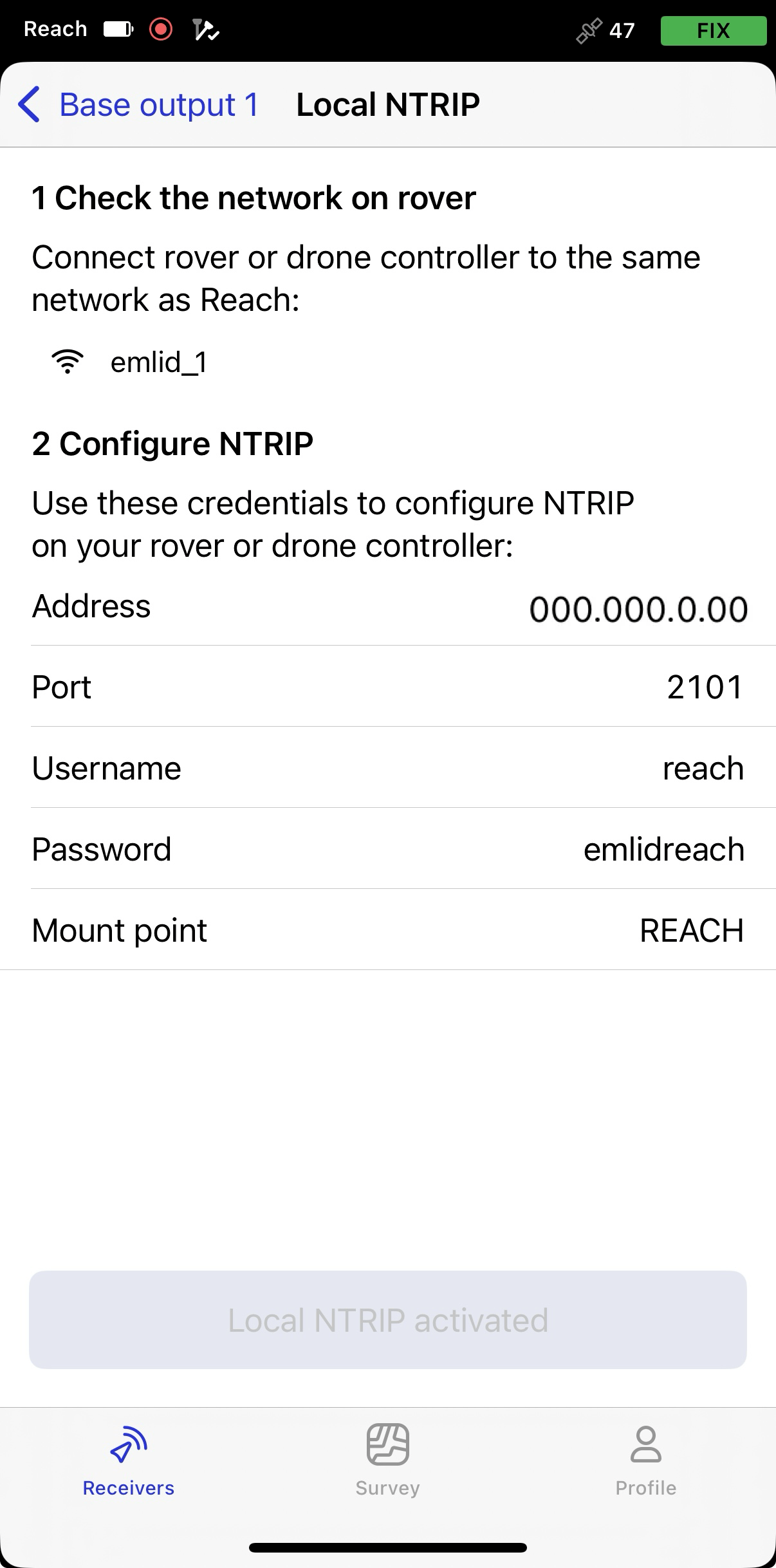
Appuyez sur le bouton Information pour accéder à la page avec les identifiants du rover.
-
Connectez votre contrôleur au même réseau Wi-Fi que votre Reach.
remarquePour assurer une bonne connexion, gardez la distance entre le contrôleur du drone et votre base à quelques mètres.
Configurer le Reach RS4/RS4 Pro comme base en utilisant Emlid Caster
Pour configurer votre Reach RS4/RS4 Pro comme base pour un drone DJI RTK en utilisant Emlid Caster, vous devez accéder à Emlid Caster et obtenir les identifiants NTRIP. Suivez les étapes ci-dessous :
-
Accédez à Emlid Caster et obtenez les identifiants NTRIP pour la base et le rover.
astucePour en savoir plus, consultez la documentation d'Emlid Caster.
-
Placez votre Reach sur le trépied et assurez-lui une vue dégagée du ciel.
astuceApprenez-en plus sur le placement et la configuration de la base dans les guides Placement et Choisir la méthode de configuration de la base.
-
Ouvrez Emlid Flow et connectez-vous à votre récepteur.
-
Connectez votre Reach à internet.
astucePour en savoir plus sur la connexion de votre Reach RS4/RS4 Pro à internet, consultez les guides suivants :
-
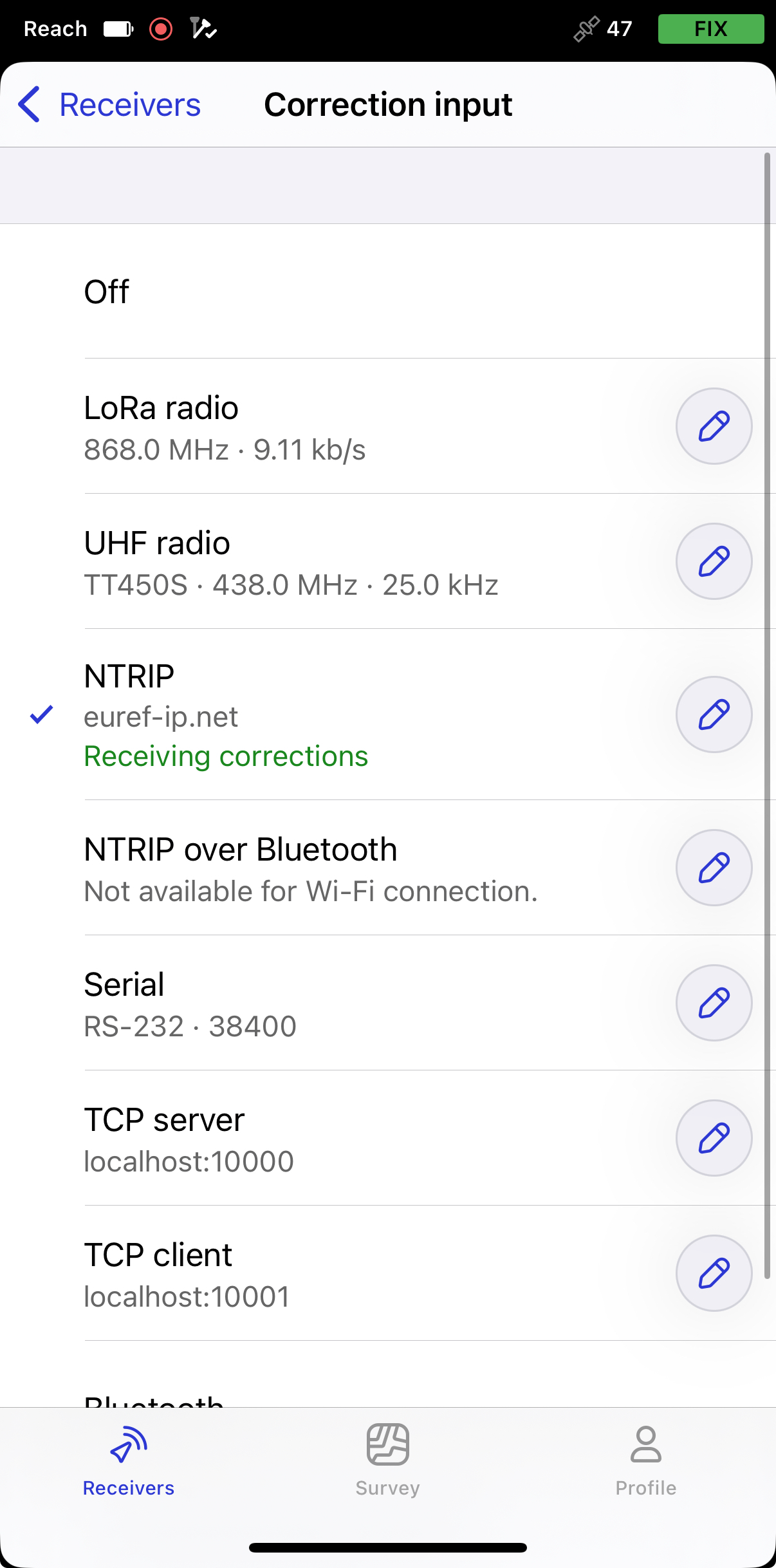
Sur l'écran _Receivers (Récepteurs), appuyez sur Base output (Sortie de base) et sélectionnez l'option _NTRIP*.
-
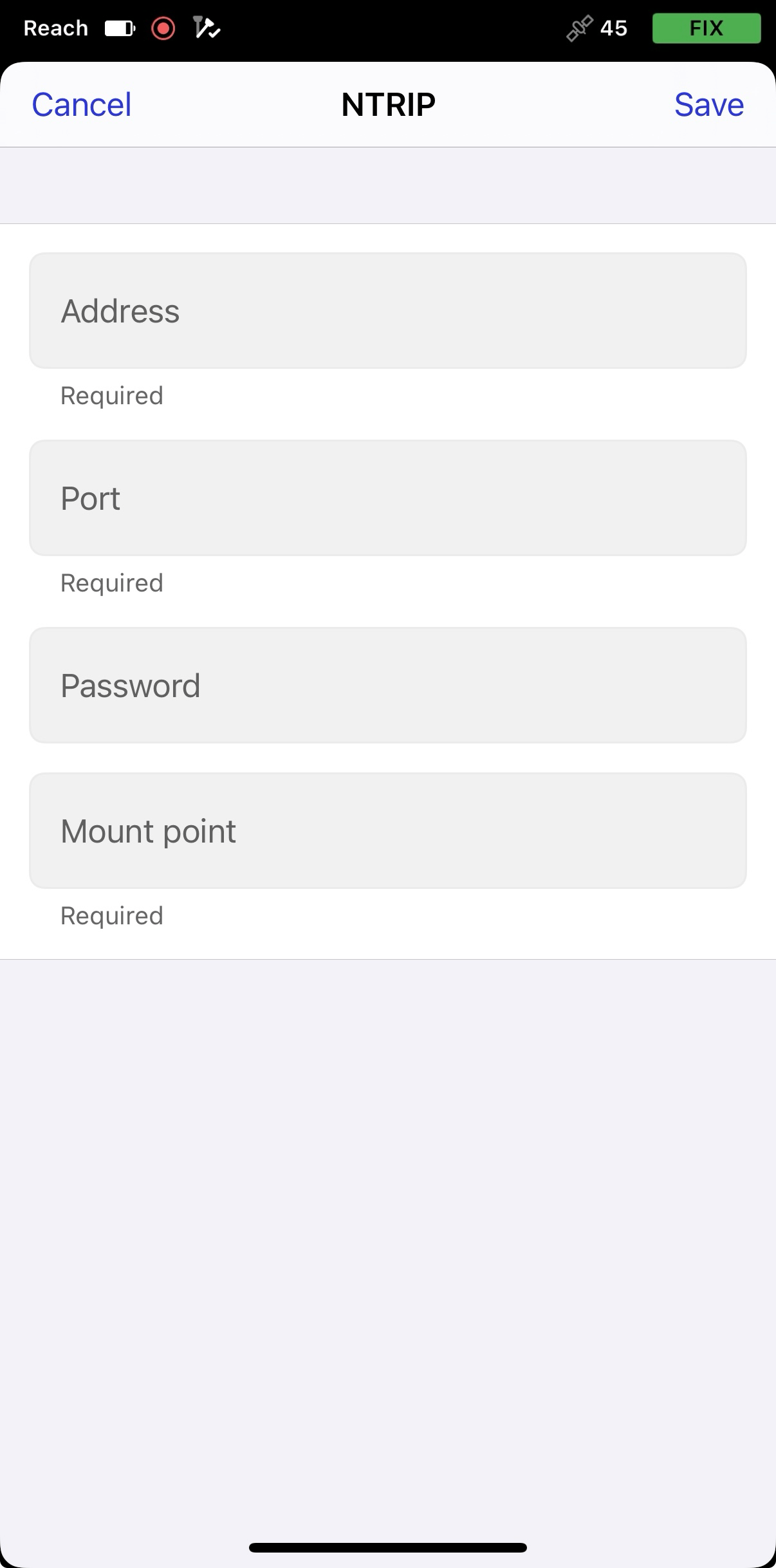
Appuyez sur le bouton Edit (Modifier) et insérez les identifiants NTRIP pour la base :
-
Adresse : l'URL ou l'adresse IP du diffuseur NTRIP.
-
Port : le port utilisé pour se connecter au diffuseur. La valeur par défaut est généralement 2101, sauf si votre fournisseur spécifie un port différent.
-
Nom d'utilisateur : le nom d'utilisateur utilisé pour s'authentifier auprès du service NTRIP. Dans certains cas, il peut s'agir de votre nom ou de votre adresse e-mail.
-
Mot de passe : le mot de passe associé au nom d'utilisateur.
-
Point de montage : le nom du flux de corrections fourni par le service NTRIP.
astucePour savoir quel point de montage vous convient le mieux, consultez le site Web de votre fournisseur NTRIP. En général, des distances plus courtes par rapport à la station de référence améliorent les performances RTK.
remarquePour assurer une transmission correcte des corrections, vérifiez les identifiants que vous avez entrés.
-
Une fois que vous avez placé et configuré votre base, vous pouvez passer à la configuration du drone.
Configurer le drone DJI RTK comme rover dans GS RTK
Si vous utilisez un drone DJI Mavic 3 Enterprise Series ou un modèle plus récent, reportez-vous à la section ci-dessous pour obtenir des instructions de configuration dans la nouvelle application de contrôleur, Pilot 2.
Pour configurer le drone DJI Mavic 3 Enterprise Series ou un modèle plus récent dans Pilot 2, suivez les étapes ci-dessous :
-
Connectez le contrôleur à votre drone.
-
Ouvrez GS RTK.
-
Sélectionnez le menu Plan (Plan) ou Fly (Voler). Si vous choisissez Plan, sélectionnez une méthode de planification.
-
Ouvrez Settings (Paramètres) en appuyant sur l'icône des 3 points dans le coin supérieur droit.
-
Allez dans l'onglet RTK Settings (Paramètres RTK).
-
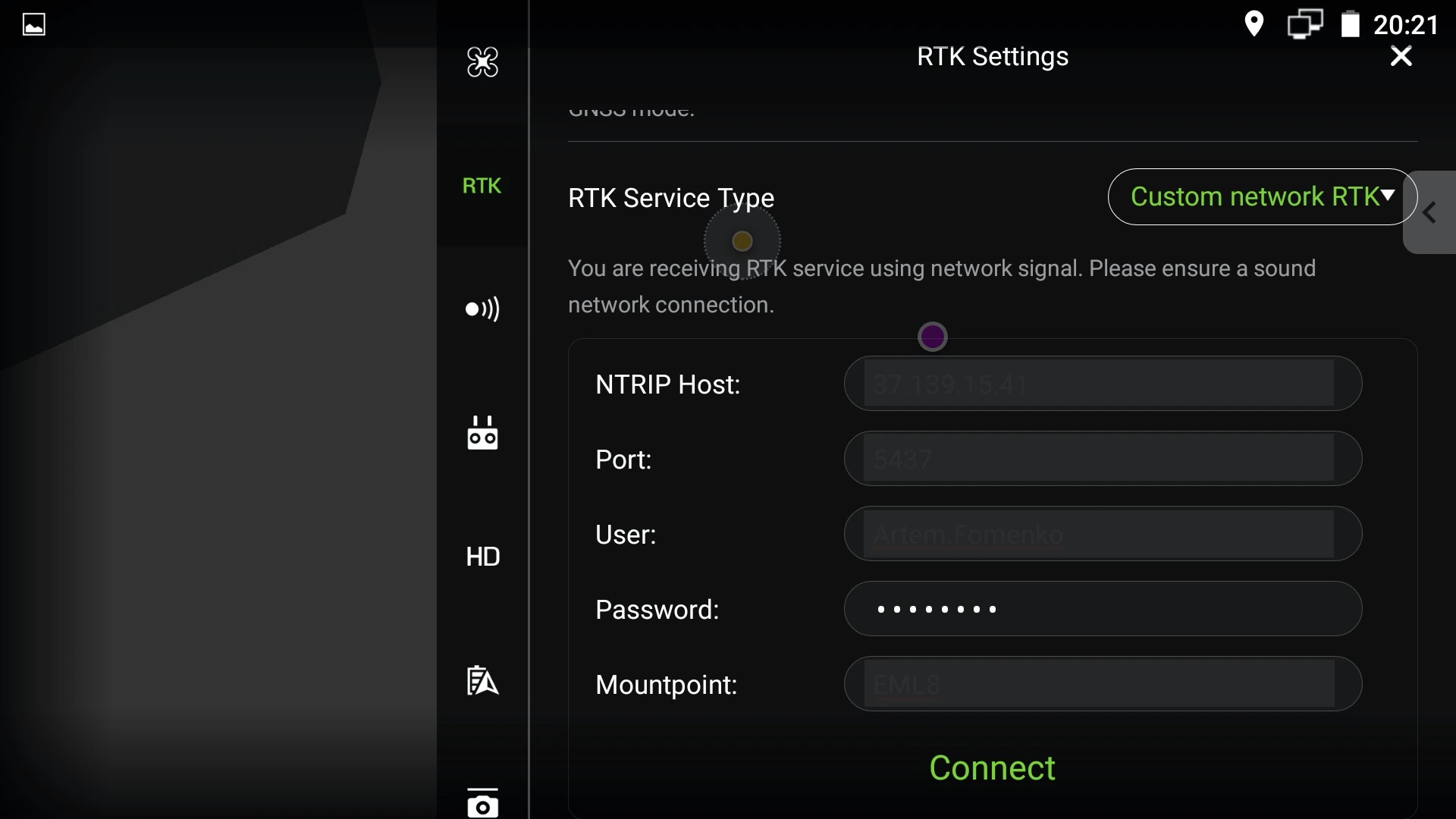
Dans RTK Service Type (Type de service RTK), choisissez Custom network RTK (RTK réseau personnalisé) et remplissez le formulaire d'identifiants NTRIP :
- Hôte NTRIP : l'URL ou l'adresse IP du diffuseur NTRIP.
- Port : le port utilisé pour se connecter au diffuseur. La valeur par défaut est généralement 2101, sauf si votre fournisseur spécifie un port différent.
- Compte : le nom d'utilisateur utilisé pour s'authentifier auprès du service NTRIP. Dans certains cas, il peut s'agir de votre nom ou de votre adresse e-mail.
- Mot de passe : le mot de passe associé au nom d'utilisateur.
- Point de montage : le nom du flux de corrections fourni par le service NTRIP.
remarqueRemplissez les identifiants que vous avez obtenus lors de l'accès à Emlid Caster ou de l'activation de l'option NTRIP locale dans Emlid Flow. Assurez-vous d'utiliser les identifiants pour le rover.
-
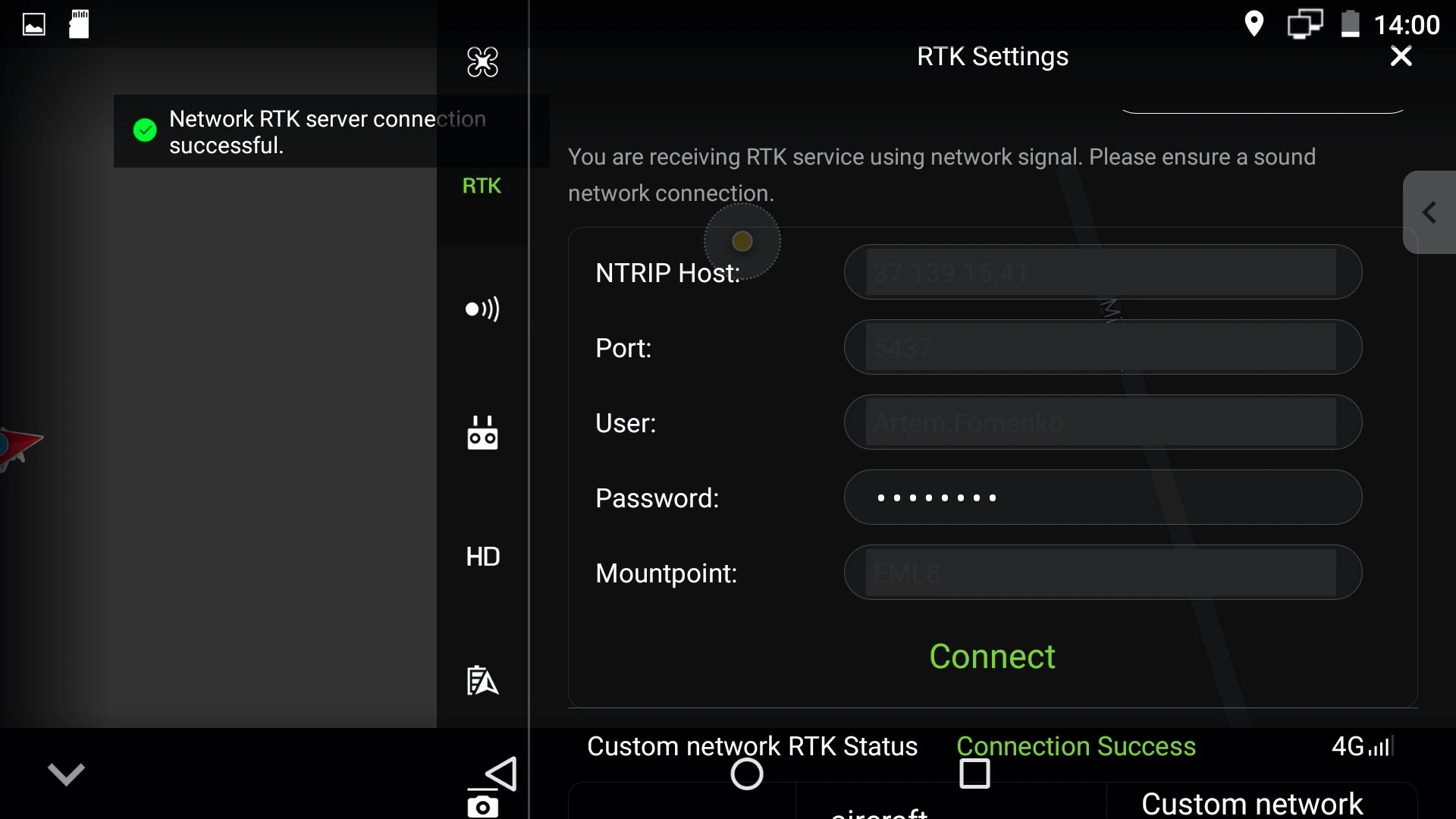
Appuyez sur le bouton Connexion. Le message « Connexion au serveur RTK réseau réussie » apparaîtra. Cela signifie que la base est correctement connectée.
Configurer d'autres drones DJI comme rover dans Pilot 2
Pour configurer vos rovers DJI RTK, suivez les étapes ci-dessous :
-
Connectez le contrôleur à votre drone.
-
Ouvrez Pilot 2.
-
Depuis le menu Drone Settings (Paramètres du drone) dans Flight Dashboard (Tableau de bord de vol), appuyez sur RTK.
-
Choisissez soit Custom Network RTK (RTK réseau personnalisé) soit D/RTK 2 Mobile Station (Station mobile D-RTK 2) comme source RTK. Si vous utilisez un service RTK personnalisé, entrez les détails de connexion requis et appuyez sur Start Transmitting (Démarrer la transmission).
Lorsque la connexion RTK est établie, tous les indicateurs d'état deviennent verts, y compris l'icône RTK.
Effectuer le vol
Lorsque vous configurez la communication entre votre Reach RS4/RS4 Pro et un drone, vous pouvez effectuer le vol. Fournissez à votre drone DJI RTK une vue dégagée du ciel et poursuivez la mission.

Une fois le vol terminé, vous pouvez télécharger les images géolocalisées et les utiliser pour une cartographie ultérieure dans un logiciel de photogrammétrie.
Pour créer une carte à l'aide de Pix4DMapper, consultez le tutoriel Créer la carte dans Pix4Dmapper.