Guía PPK de senseFly
Resumen
En este tutorial, encontrará información sobre cómo llevar a cabo PPK con drones senseFly y Reach RS4/RS4 Pro en el software eMotion.
También puede encontrar una guía paso a paso en la base de conocimiento de senseFly.
Preparación de los datos de Reach RS4 / RS4 Pro
En esta parte, explicaremos cómo colocar Reach RS4/RS4 Pro para realizar registros para PPK.
Colocación del receptor Reach RS4 / RS4 Pro
Para aprender otras formas de colocar la estación base local, consulte la guía Configuración de la base.
A continuación, se describen los pasos generales para colocar el receptor base.
-
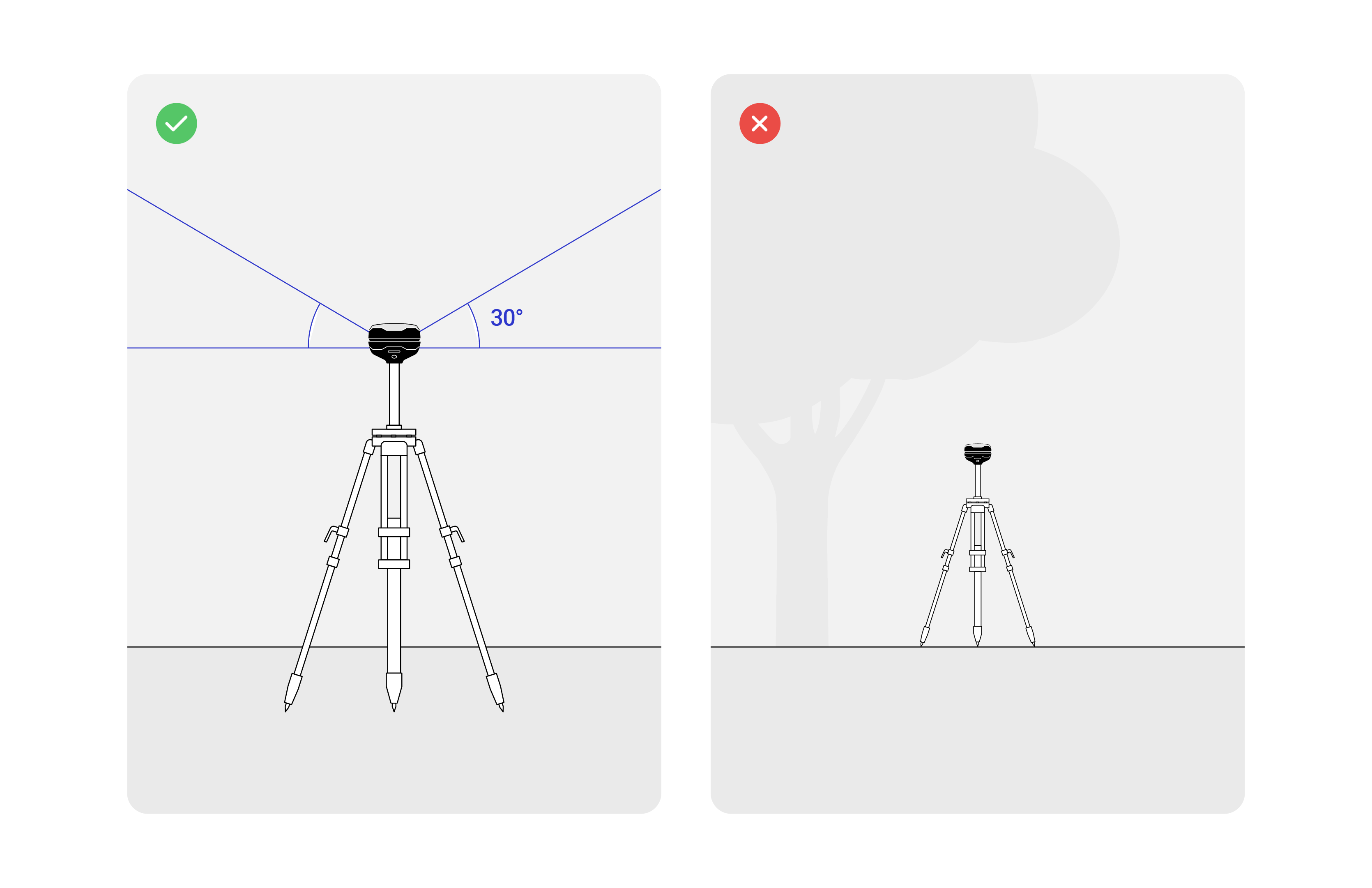
Asegúrese de elegir una ubicación adecuada para colocar la estación base Reach RS4/RS4 Pro. Eche un vistazo a las 2 imágenes siguientes. La imagen de la izquierda muestra las condiciones adecuadas para la ubicación de la base. El de la derecha es un ejemplo de malas condiciones del entorno, como visión reducida del cielo, posibles obstrucciones o vegetación cercana.
-
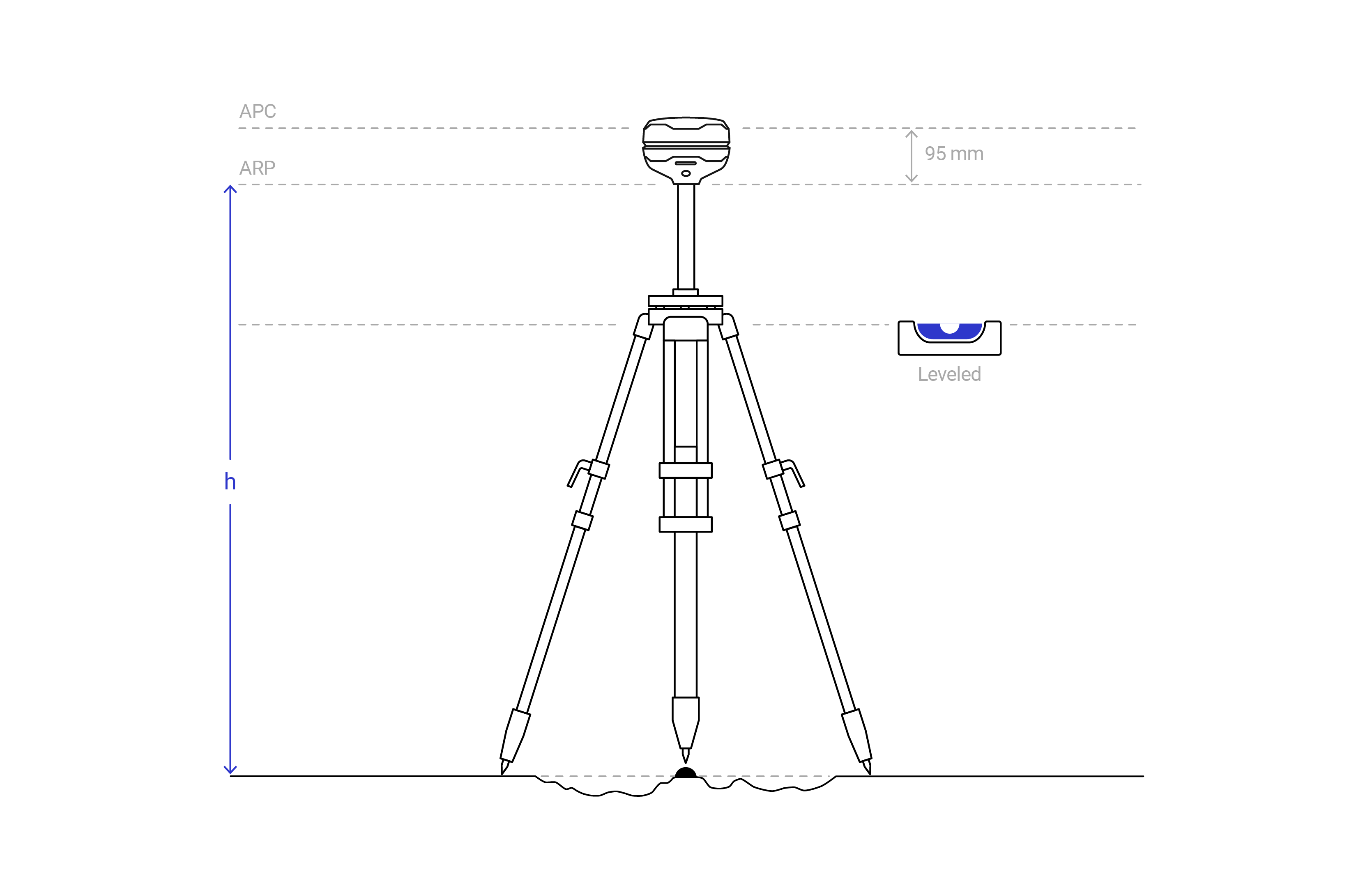
Asegúrese de que su Reach RS4/RS4 Pro esté nivelado y colocado exactamente sobre el punto marcado en el trípode.
-
Si está configurando las coordenadas de la base manualmente, mida el desplazamiento de la altura de la antena.
notaLa altura de la antena se mide como la distancia entre la marca y el punto de referencia de la antena (ARP).
Para Reach RS4/RS4 Pro, considere la altura de la antena como la distancia entre la marca y la parte inferior de Reach RS4/RS4 Pro (h en la figura inferior) más 95 mm.
notaSe necesitarán coordenadas base precisas para el postprocesamiento en eMotion.
Registro de datos sin procesar
-
Abra una lista de redes Wi-Fi en su smartphone/tableta.
-
Conéctese a una red llamada reach:xx:xx.
-
Introduzca la contraseña de la red. La contraseña por defecto es emlidreach. Si ya la ha cambiado, introduzca su contraseña personalizada.
notaPara restablecer la contraseña predeterminada de Wi-Fi, emlidreach, debe reprogramar el receptor. Tenga en cuenta que al actualizar el firmware se borran todos los registros almacenados en el receptor y se restablecen todos los ajustes a sus valores predeterminados.
-
Seleccione Reach RS4/RS4 Pro en la lista de dispositivos disponibles en la aplicación Emlid Flow.
-
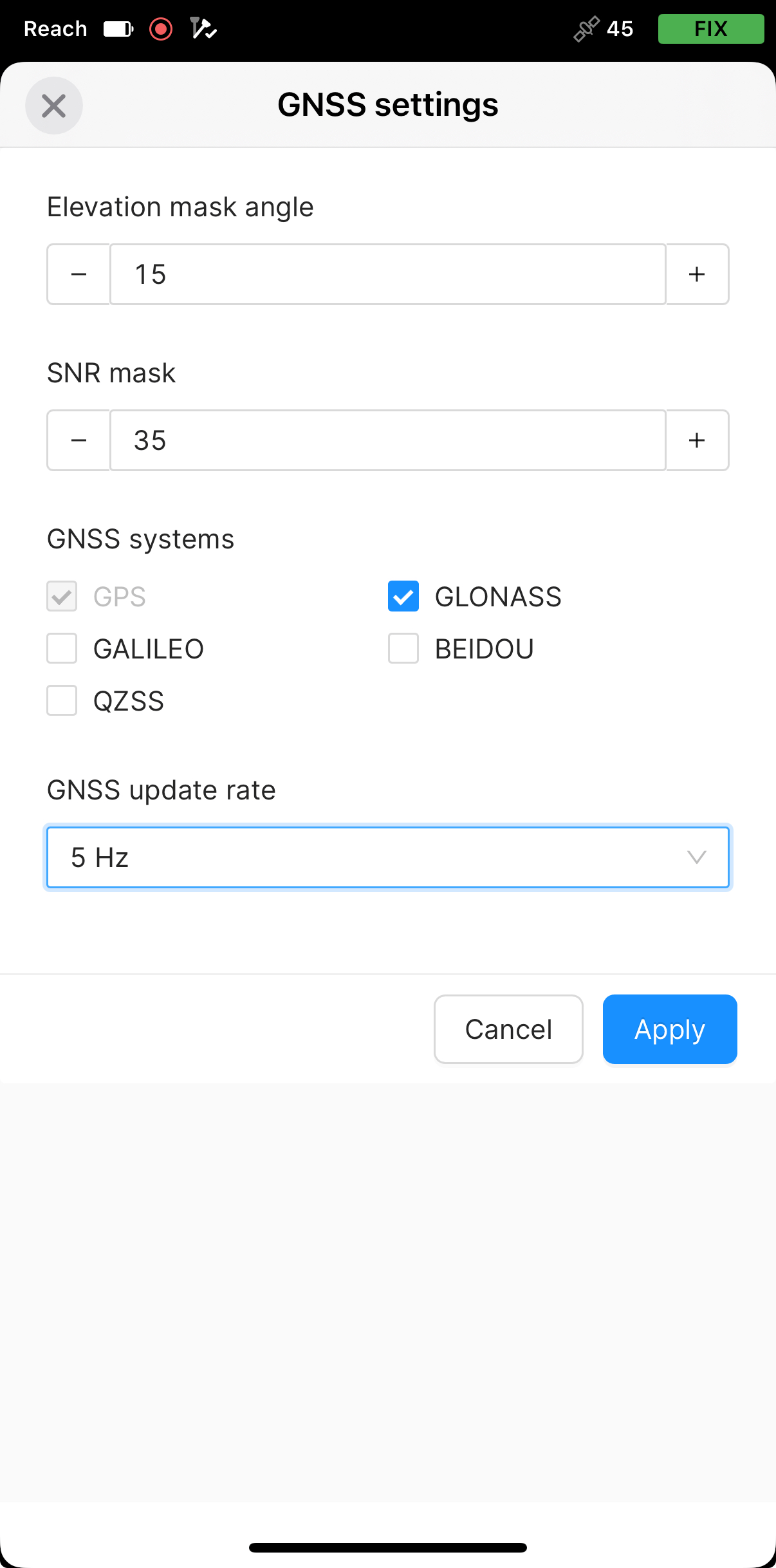
En la pantalla Configuración, pulse Configuración de GNSS.
-
Seleccione las constelaciones GNSS como se indica a continuación.
notaNuestra recomendación por defecto es que todos los GNSS estén activados a 1 Hz.
-
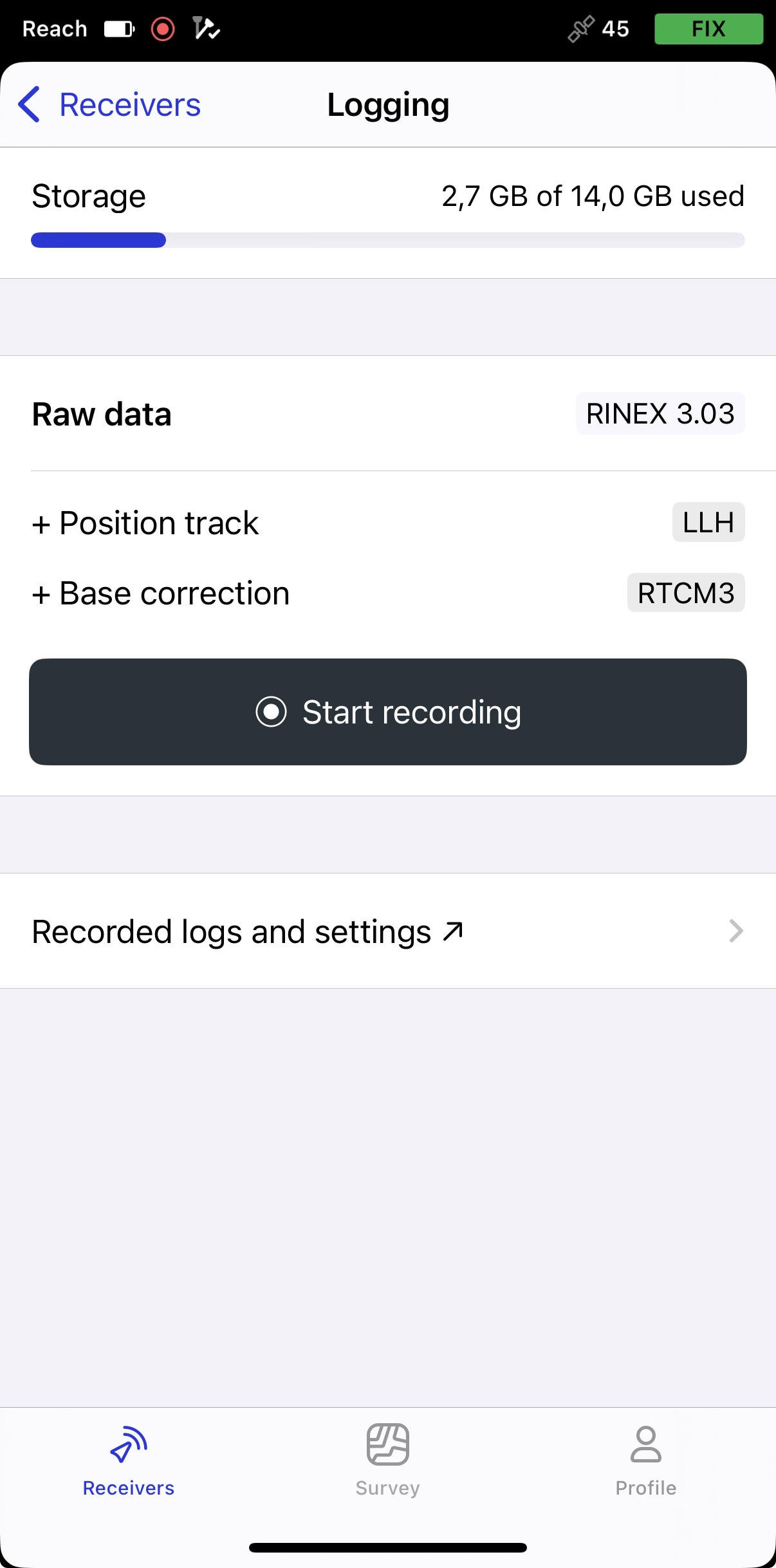
Vuelva a la pantalla Receptores y pulse Registro.
-
Pulse el botón Recorded logs and settings (Configuración y registros grabados).
-
Para configurar el registro, pulse el botón Configuración.
-
En el menú desplegable Format and presets (Formato y preajustes), seleccione UBX. Aplicar cambios.
Una vez que la base Reach RS4/RS4 Pro inicia el registro de datos, puede seleccionar que su eBee vuele en modo autónomo.
Conversión del registro de datos sin procesar
-
Descargue las aplicaciones de RTKLIB QT.
-
Descargue archivos sin procesar de Reach a su PC.
-
Inicie RTKLIB RTKConv.
-
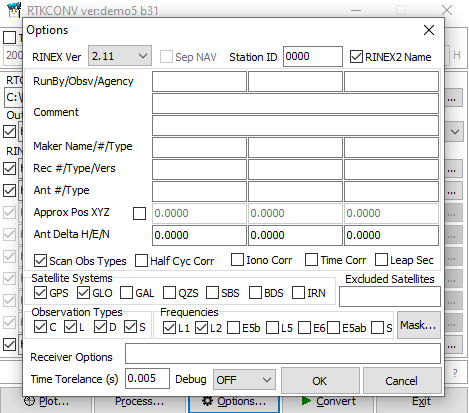
Pulse el botón Opciones.
-
Elija Versión Rinex 2.11.
-
Active Sistemas de satélites que necesita.
-
Pulse Aceptar.
-
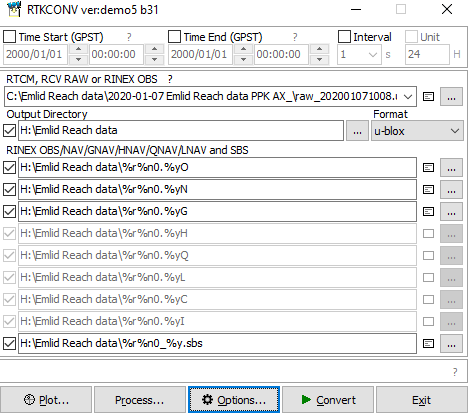
Añada el registro sin procesar de su rover en el primer campo y elija el directorio de salida.
-
Elija el formato de su registro en el menú desplegable. Establezca el formato a u-blox.
-
Pulse Convertir.
-
Ahora puede proceder al postprocesamiento de sus registros en eMotion3.
Postprocesamiento con eMotion
-
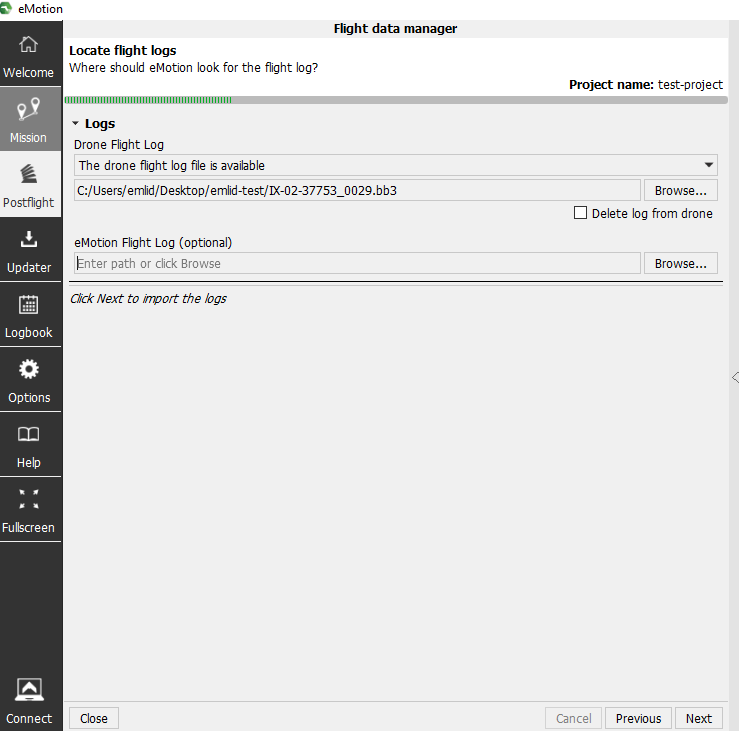
Inicie eMotion3 y seleccione el FDM (Administrador de dispositivo de vuelo) posterior al vuelo.
-
Cree un proyecto e importe los registros de vuelo. Vaya a la pestaña de flujo de trabajo RTK/PPK (RTK/PPK workflow).
-
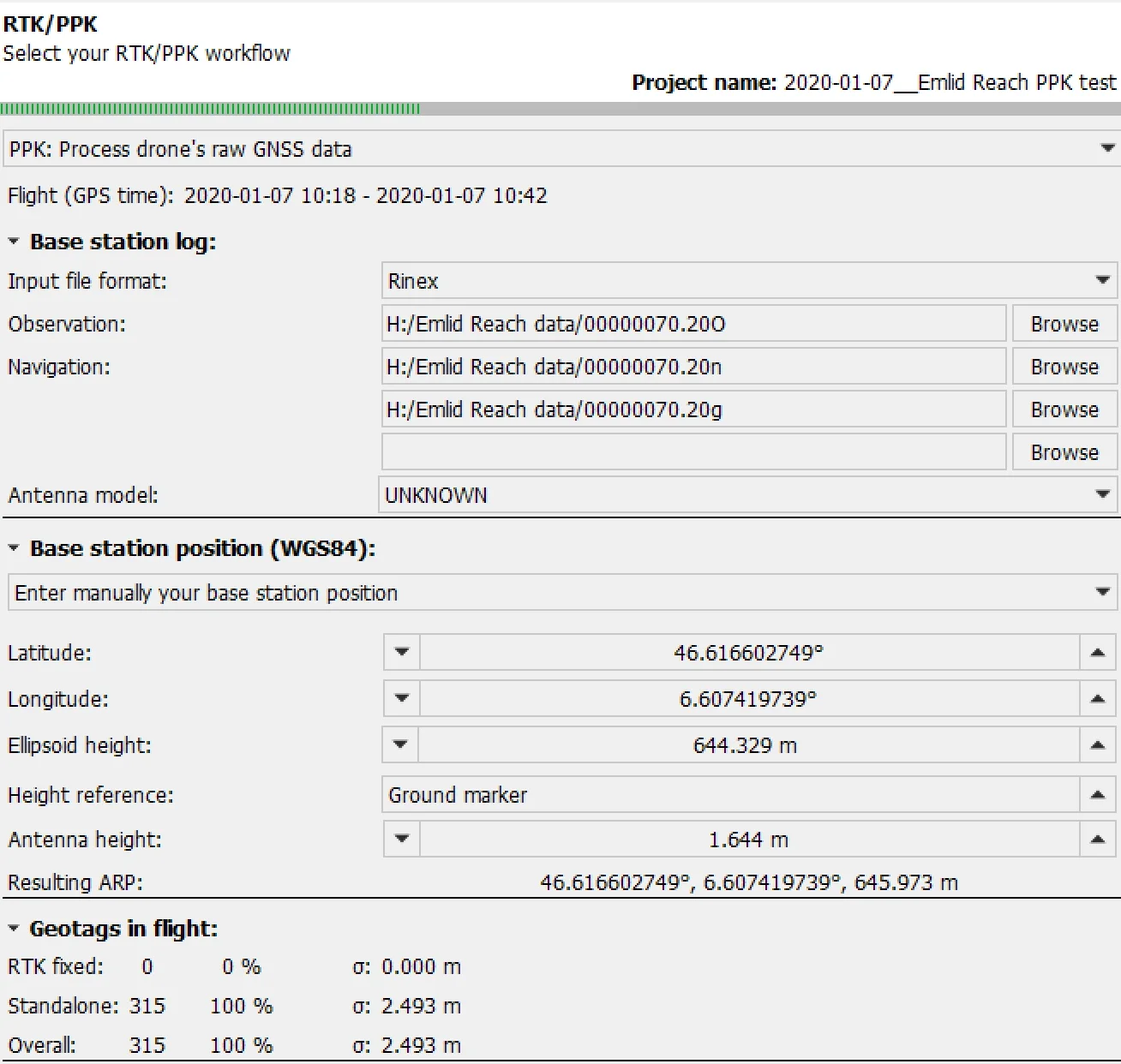
Establezca el formato de archivo de entrada en RINEX.
-
Seleccione los archivos RINEX O, N y G recién convertidos de la base Reach RS4/RS4 Pro.
-
Ajuste el modelo de antena (Antenna model) a DESCONOCIDO (UNKNOWN).
-
Rellene el campo de posición base con las coordenadas conocidas del punto del terreno marcado (marcador del terreno).
-
Establezca la referencia de altura (Height Reference) en el marcador de tierra (Ground marker).
-
Introduzca la altura de la antena calculada según la explicación de este paso para el receptor.
-
Pulse Siguiente (Next) para calcular la solución.
.
-
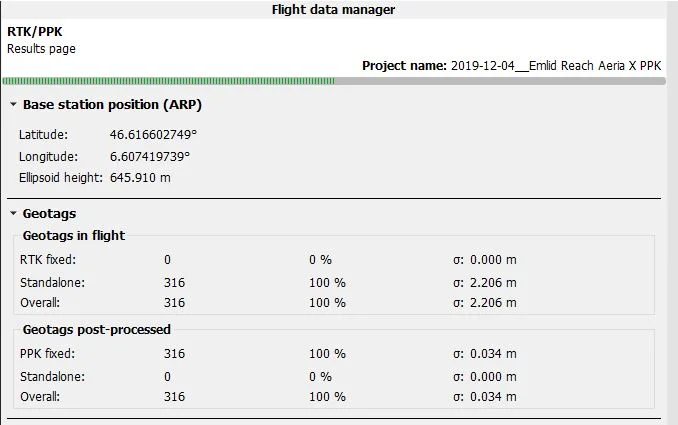
Una vez finalizada la solución calculada, las geoetiquetas se postprocesan a partir del archivo RINEX con la posición base corregida.
- Continúe con los pasos restantes de FDM para completar el proceso posterior al vuelo.
Ahora ya ha postprocesado correctamente los registros del dron Reach RS4/RS4 Pro y eBee.