Scelta del metodo di configurazione della base
Panoramica
La cinematica in tempo reale (RTK) è una tecnica che migliora la precisione del posizionamento GNSS utilizzando due ricevitori: una base fissa con coordinate note e un rover in movimento. Il rover misura la sua posizione rispetto alla base. Questo significa che, anche se misurate con precisione centimetrica, le coordinate del rover sono accurate solo quanto il posizionamento della base. Qualsiasi spostamento nella posizione assoluta della base sarà presente anche nelle misurazioni del rover.
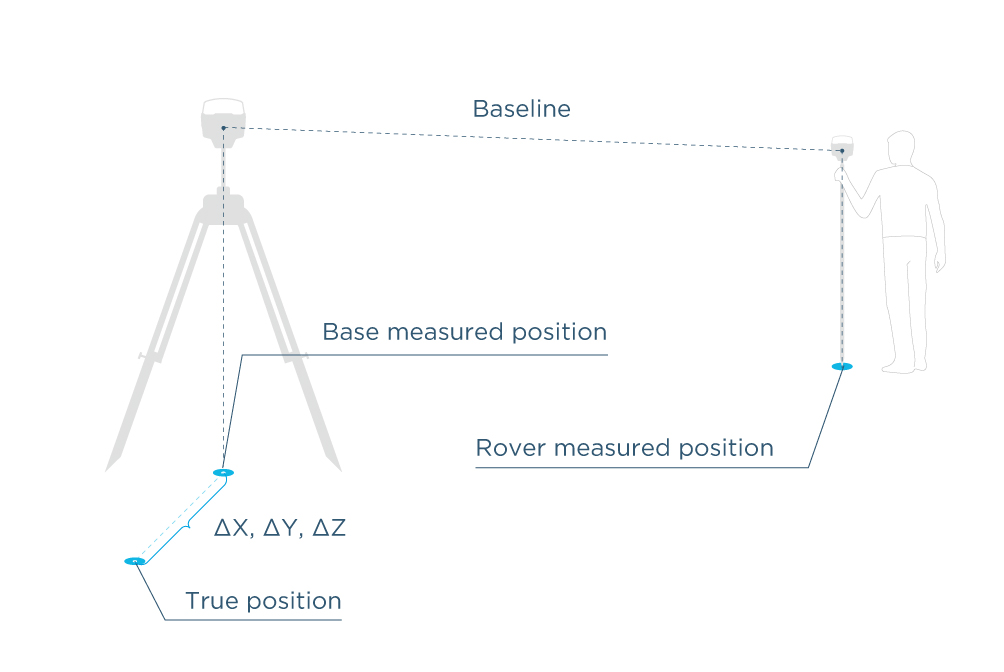
Per alcune applicazioni, è sufficiente che la posizione di un oggetto sia accurata solo rispetto alla stazione base, ma per il rilievo e la mappatura, è fondamentale conoscere la posizione reale con un'elevata precisione assoluta. Per ottenere questo risultato, l'errore nella posizione della stazione base deve essere evitato o ridotto posizionandola su un punto noto o determinandone attentamente le coordinate.
Ecco perché è importante prestare molta attenzione a un corretto posizionamento durante la configurazione della base. Esaminiamo i concetti chiave che vi aiuteranno a capire come configurare correttamente la base per le vostre esigenze.
Sistemi di coordinate e datum
La prima cosa da considerare prima di configurare la base per l'RTK è il sistema di coordinate che si intende utilizzare per le misurazioni.
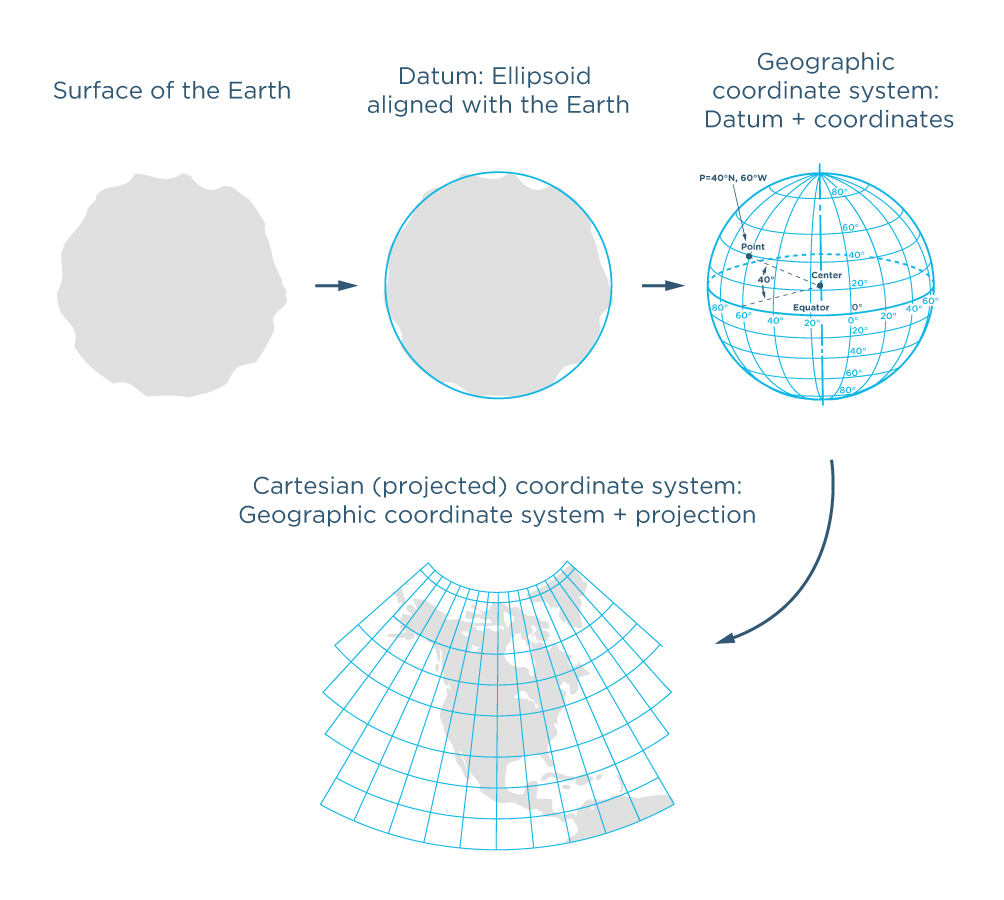
Nel rilievo, la posizione di un oggetto nello spazio è definita da un sistema di coordinate. Esistono molti sistemi di coordinate progettati per diverse applicazioni e Paesi. Il fondamento di ogni sistema di coordinate è il datum.
Il datum contiene le informazioni sul modello matematico della Terra (ellissoide) e su come questo è allineato con la superficie terrestre, fornendo il sistema di riferimento per le misurazioni. Un sistema di coordinate viene quindi utilizzato per descrivere le posizioni relative al datum con latitudine e longitudine. Per una rappresentazione cartesiana piana delle coordinate, viene applicata una proiezione cartografica.
È importante scegliere il datum e il sistema di coordinate corretti per l'area in cui si lavora, se si desidera che le misurazioni siano compatibili con gli altri dati esistenti. Mischiare i datum è come mischiare chilometri e miglia: le misurazioni non avranno senso.
Il datum e il sistema di coordinate richiesti sono solitamente indicati nell'incarico tecnico o nella documentazione ufficiale. In alcuni casi, è possibile cercare il sistema di coordinate ottimizzato per la propria area nell'EPSG Geodetic Parameter Dataset (noto anche come registro EPSG).
L'intera configurazione si conclude con la configurazione del progetto sul rover, che richiede la specifica di un sistema di coordinate solitamente basato sul datum della base.
Per ulteriori informazioni sulla configurazione del sistema di coordinate in Emlid Flow & Emlid Flow 360, consultare l'articolo Introduzione ai sistemi di coordinate.
Posizionamento
Dopo aver impostato un sistema di coordinate, è necessario decidere come impostare le coordinate della base. In generale, ci sono due modi per impostare la posizione della base: specificare le coordinate di un punto noto o calcolare la media della posizione della base in modalità SINGLE.
In entrambi i casi, le misurazioni del rover avranno una precisione centimetrica, ma la precisione assoluta dipenderà sempre dalla precisione della posizione della base. A seconda del metodo di configurazione della base, è possibile ottenere un'elevata precisione relativa (media in SINGLE) o una precisione assoluta (utilizzando le coordinate note).
Per ulteriori informazioni sulla precisione assoluta e relativa, consultare l'articolo Semplice introduzione alla precisione e all'accuratezza sul nostro blog.
Posizionamento relativo
Come accennato in precedenza, in RTK, la base funge da punto di riferimento principale per il rover. Le coordinate raccolte dal rover sono sempre accurate rispetto alla base, ma potrebbero non essere accurate rispetto al sistema di coordinate selezionato. Questo si chiama posizionamento relativo e si verifica quando la posizione della stazione base non è definita con precisione nel sistema di riferimento selezionato.
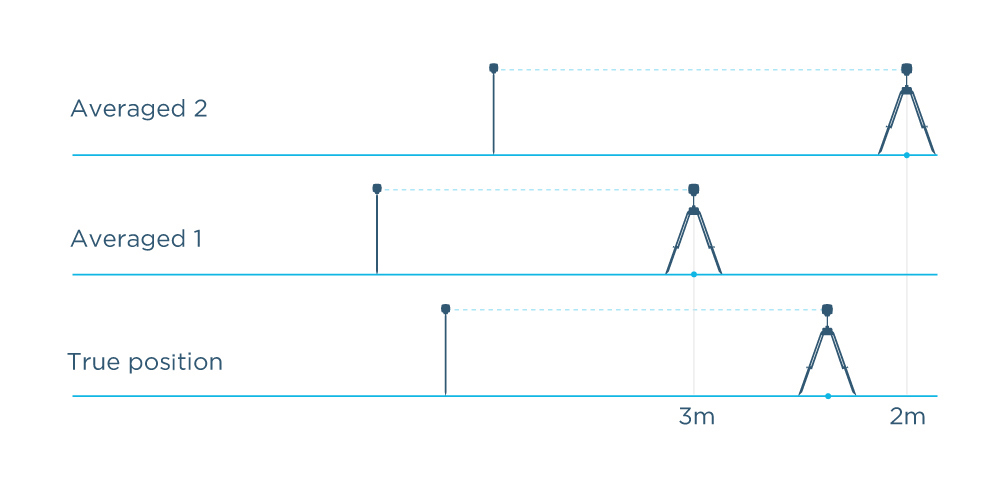
Ad esempio, quando non si conosce la posizione della base, è possibile calcolarne la media in modalità SINGLE. La media viene eseguita in modalità autonoma senza l'uso di correzioni e la posizione viene determinata con una precisione di diversi metri. Ogni volta che si calcola la media della posizione della base dallo stesso punto, le coordinate misurate possono differire di diversi metri dai risultati precedenti e dalla posizione reale. Pertanto, la precisione effettiva (assoluta) delle misurazioni del rover sarà a livello di metro. Vedere la Figura 1 qui sotto.
Questo tipo di configurazione è adatto quando è necessario misurare gli oggetti in modo relativo l'uno rispetto all'altro. Ad esempio, questo metodo può essere utilizzato per misurare aree e distanze o per mantenere un trattore autonomo sulla traiettoria corretta. Per riutilizzare la configurazione e ottenere le stesse coordinate per gli stessi punti, è necessario posizionare la base sullo stesso punto (è una buona idea utilizzare un contrassegno a terra) e inserire manualmente le stesse coordinate della base determinate in precedenza o sceglierle da quelle salvate in Emlid Flow. Altrimenti, si potrebbe ottenere una posizione della base diversa, che non si adatterà al progetto e porterà a una mancata corrispondenza delle coordinate.
Dopo aver impostato la posizione base, la stazione base trasmette le proprie coordinate note e i dati satellite osservati al rover. In questo caso, la base mostra una soluzione SINGLE perché non calcola la propria posizione e fornisce solo dati di riferimento al rover. Il rover combina i dati ricevuti dalla base con le proprie osservazioni satellite per calcolare una soluzione RTK e in genere mostra una soluzione FIX.
Per saperne di più su questo metodo, consultare la nostra guida all'utilizzo del metodo di immissione delle coordinate Media SINGLE in Emlid Flow.
Posizionamento assoluto
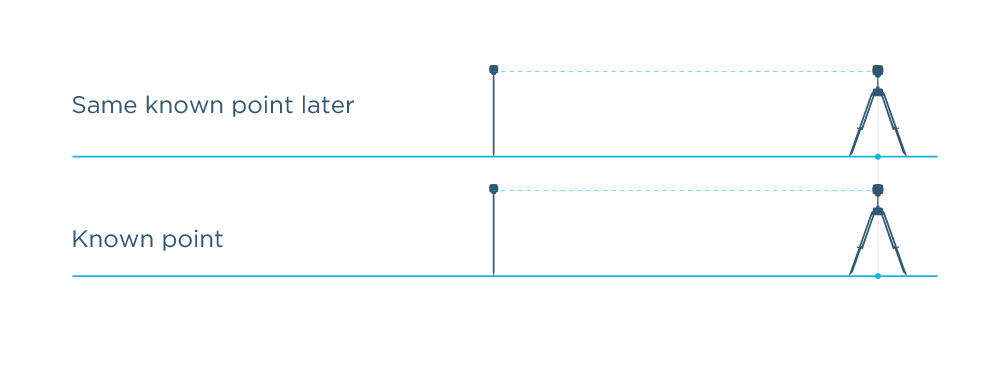
Quando le posizioni raccolte in RTK sono accurate sia rispetto alla base che al sistema di coordinate selezionato, si parla di posizionamento assoluto. Per ottenere questo risultato, le coordinate della base devono essere note e impostate manualmente. L'inserimento della posizione nota della base “fissa” la configurazione RTK nel punto corretto a terra. In questo modo, le posizioni misurate con il rover saranno precise e accurate nel sistema di coordinate selezionato a livello centimetrico. Vedere la Figura 2 qui sotto.
Si consiglia di configurare la base utilizzando il metodo di inserimento manuale delle coordinate se si desidera ottenere risultati precisi e ripetibili in un sistema di coordinate selezionato. Lavorare con una posizione di base nota è necessario quando si prevede di utilizzare le misurazioni raccolte con altri dati, ad esempio, per inviare i confini della particella rilevata al catasto. Ci sono diversi modi per ottenere le coordinate note per configurare la base:
- Posizionare la base su un punto noto o un benchmark esistente utilizzando il metodo di inserimento manuale delle coordinate nell'app Emlid Flow;
- Se il benchmark si trova in un punto difficile da raggiungere ma ci si trova nelle vicinanze, è possibile utilizzare le coordinate del benchmark per applicare la funzione di spostamento della base in Emlid Flow;
- Impostare le coordinate della base con un'accuratezza centimetrica assoluta utilizzando il metodo di immissione delle coordinate Media FIX, configurandola come rover e ricevendo correzioni dal servizio NTRIP;
- Determinare le coordinate di un punto utilizzando il flusso di lavoro di elaborazione statica in Emlid Studio o servizi di post-elaborazione online come OPUS, AUSPOS, NRCAN, IBGE.
Ulteriori letture:
- Configurazione manuale della posizione della base
- Media della posizione di base in FIX
- Applicazione dello spostamento della base
- AUSPOS—Servizio di elaborazione GPS online
- Servizio utente di posizionamento online (OPUS - Online Positioning User Service) di NOAA
- Posizionamento preciso del punto nel sistema di riferimento territoriale canadese (CSRS-PPP Canadian Spatial Reference System Precise Point Positioning)
- IBGE-PPP—Servizio online per la post-elaborazione dei dati GNSS
- Media della posizione di base in SINGLE