Choosing base setup method
Overview
Real-Time Kinematic (RTK) is a technique that enhances the accuracy of GNSS positioning by using two receivers—a stationary base with known coordinates and a moving rover. The rover measures its position relative to the base. This means that even though measured with the centimeter precision, the coordinates of the rover are only as accurate as the base placement. Any shift in the absolute base position will also be present in the rover measurements.
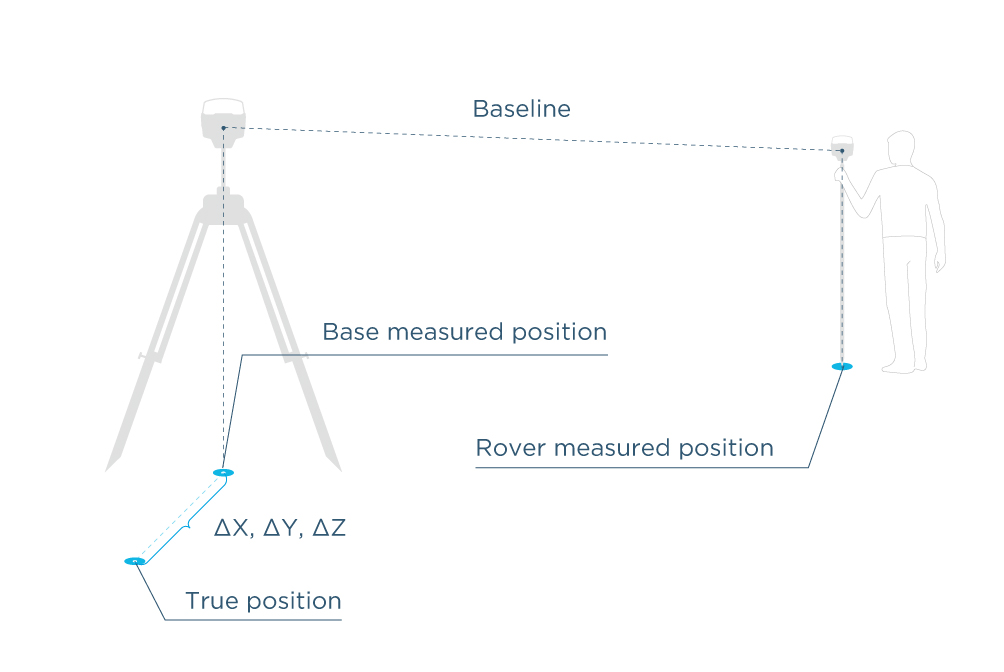
For some applications, it is sufficient when the position of an object is only accurate relative to the base station, but for surveying and mapping, it is critical to know the true position with high absolute accuracy. To achieve this, the error in the base station position should be avoided or reduced by placing it over a known point or carefully determining its coordinates.
That’s why it’s important to pay close attention to proper positioning when setting up the base. Let's take a look at the key concepts that will help you understand how to properly set up the base for your needs.
Coordinate systems and datums
The first thing to consider before setting up the base for RTK is the coordinate system that you are going to use for the measurements.
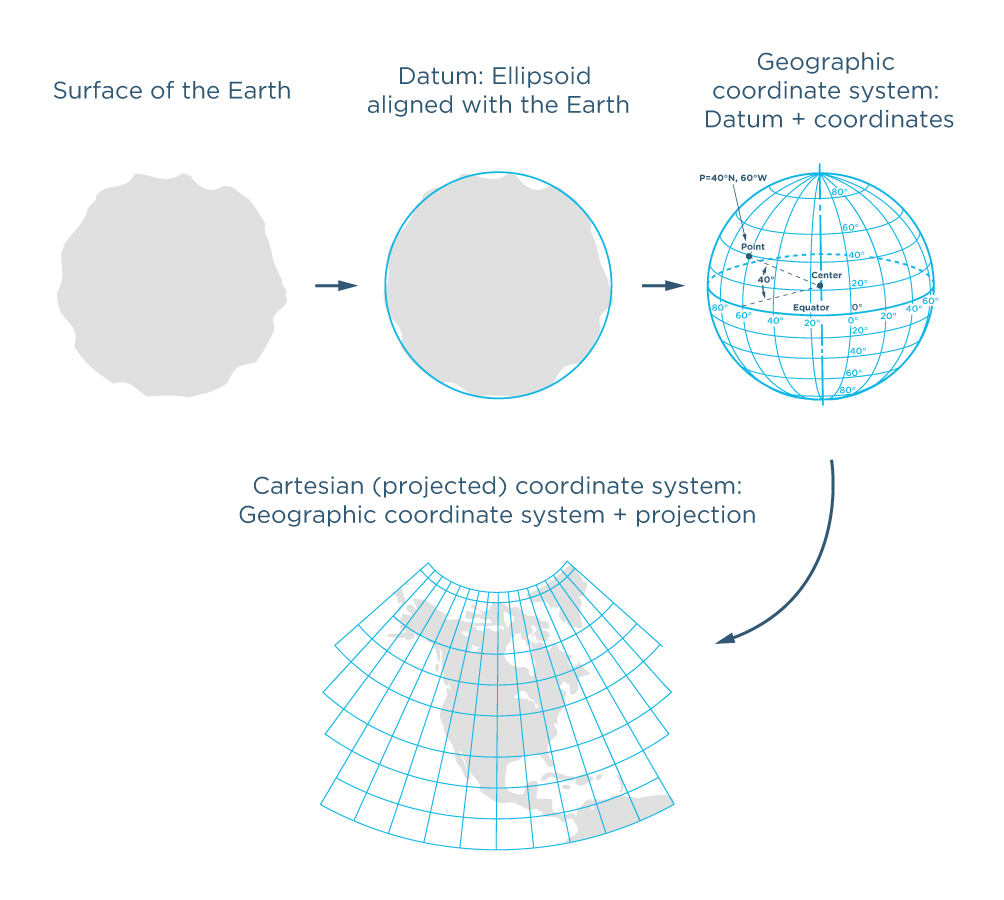
In surveying, the position of an object in space is defined by a coordinate system. There are many coordinate systems designed for different applications and countries. The foundation of every coordinate system is datum.
Datum contains the information about the mathematical model of the Earth (ellipsoid) and how it is aligned with the Earth’s surface, providing the reference frame for the measurements. A coordinate system is then used to describe the positions relative to the datum with latitude and longitude. For a flattened Cartesian representation of the coordinates, a cartographic projection is applied.
It is important to choose the correct datum and coordinate system for the area you are working in if you want your measurements to be compatible with the other existing data. Mixing datums is like mixing kilometers and miles—your measurements won’t make sense.
The required datum and coordinate system are usually given in the technical assignment or official documentation. In some cases, you can look for the coordinate system optimized for your area in the EPSG Geodetic Parameter Dataset (aka EPSG registry).
The whole setup then ends with the project setup on your rover which requires specifying a coordinate system that is usually based on the datum of your base.
Learn more about the coordinate system setup in Emlid Flow & Emlid Flow 360 in the Introduction to the coordinate systems article.
Positioning
After setting up a coordinate system, you need to decide how you are going to set the base coordinates. In general, there are two ways to set the position of your base—specify the known point coordinates or average the position of your base in SINGLE.
In both cases, the rover measurements will be centimeter-precise, but the absolute accuracy will always depend on the accuracy of the base position. Depending on the base setup method, you can obtain high relative accuracy (averaging in SINGLE) or absolute accuracy (using the known coordinates).
Learn more about absolute and relative accuracy in the Simple intro to accuracy and precision article in our blog.
Relative positioning
As mentioned earlier, in RTK, the base serves as the main reference point for the rover. Coordinates collected by the rover are always accurate relative to the base, but may not be accurate relative to the selected coordinate system. This is called relative positioning and occurs when the position of the base station is not accurately defined in the selected reference frame.
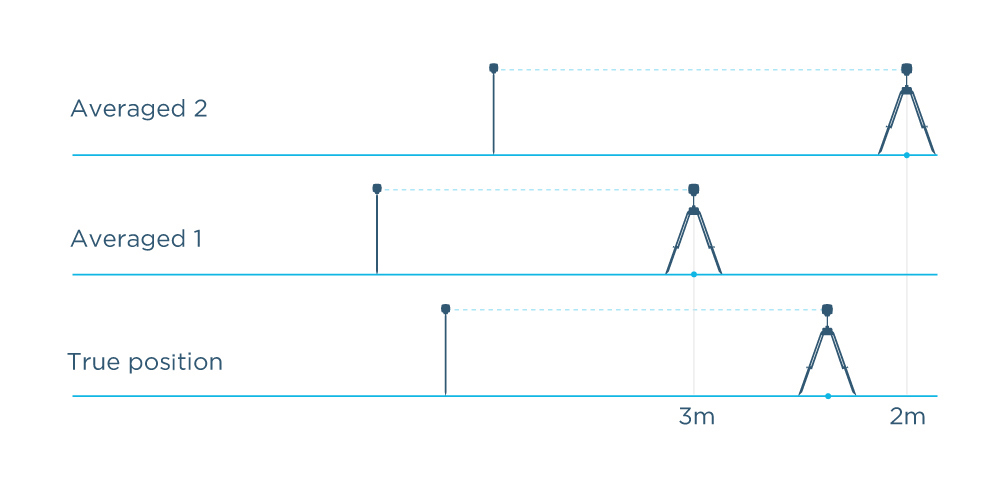
For example, when you don’t know the base position, you can average it in SINGLE. Averaging is done in standalone mode without using any corrections, and the position is determined with the accuracy of several meters. Each time you average the base position from the same point, the measured coordinates may differ by several meters from the previous results and from the true position. Thus, the actual (absolute) accuracy of the rover measurements will be at meter level. See Figure 1 below.
This type of setup is suitable when you need to measure the objects relatively to each other. For example, this method can be used to measure areas and distances, or to keep an autonomous tractor on the right track. To reuse the setup and get the same coordinates for the same points, you'll need to place the base over the same point (using a mark on the ground is a good idea) and enter the same previously determined base coordinates manually or pick them from the saved ones in Emlid Flow. Otherwise, you may end up with a different base position that won’t fit your project and lead to coordinates mismatch.
After the base position has been set, the base station transmits its known coordinates and observed satellite data to the rover. In this case, the base shows a SINGLE solution because it does not compute its own position and only provides reference data to the rover. The rover combines the data received from the base with its own satellite observations to compute an RTK solution and typically shows a FIX solution.
If you want to learn more about this method, check out our guide on using Average SINGLE coordinates entry method in Emlid Flow.
Absolute positioning
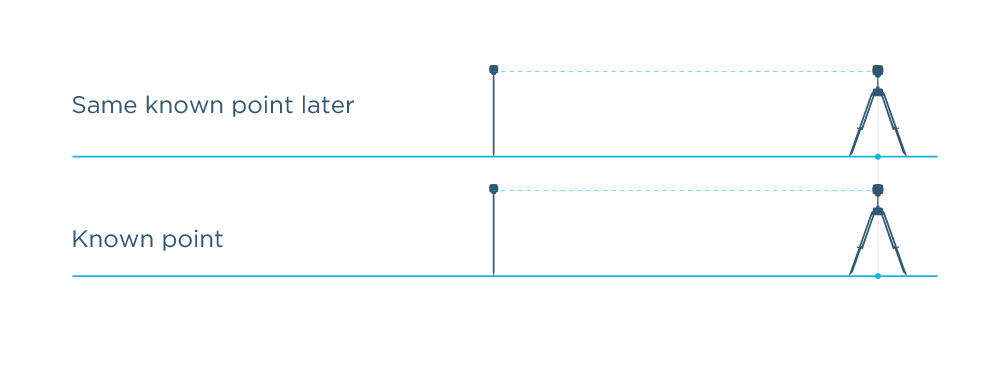
When the positions collected in RTK are accurate both relative to the base and to the selected coordinate system, it is called absolute positioning. To achieve this, the coordinates of the base must be known and set manually. Entering the known position of the base “pins” your RTK setup to the right place on the ground. This way, the positions measured with the rover will be precise and accurate in the selected coordinate system to the centimeter level. See Figure 2 below.
We recommend setting up the base using the manual coordinates entry method if you want to get precise and repeatable results in a selected coordinate system. Working with a known base position is necessary when you plan to use the collected measurements with the other data, for example, submit the surveyed parcel boundaries to the land registry. There are several ways to get known coordinates to set up the base:
- Place the base over the existing known point or benchmark using the Manual coordinates entry method in the Emlid Flow app;
- If the benchmark is located in hard to reach point but you’re nearby, you can use the benchmark coordinates to apply the base shift feature in Emlid Flow;
- Set your base’s coordinates with absolute centimeter accuracy using the Average FIX coordinates entry method by setting it up as a rover and receiving corrections from the NTRIP service;
- Determine the coordinates of a point using the Static processing workflow in Emlid Studio or online post-processing services such as OPUS, AUSPOS, NRCAN, IBGE.
Further reading:
- Setting up base position manually
- Averaging base position in FIX
- Applying Base Shift
- AUSPOS—Online GPS Processing Service
- NOAA's Online Positioning User Service (OPUS)
- Canadian Spatial Reference System Precise Point Positioning (CSRS-PPP)
- IBGE-PPP—Online service for post-processing GNSS data
- Averaging base position in SINGLE