Auswahl der Methode zur Einrichtung der Basis
Übersicht
Echtzeitkinematik (RTK) ist eine Technik, die die Genauigkeit der GNSS-Positionierung durch die Verwendung von zwei Empfängern – einer stationären Basis mit bekannten Koordinaten und einem beweglichen Rover – verbessert. Der Rover misst seine Position relativ zur Basis. Das bedeutet, dass die Koordinaten des Rovers, auch wenn sie zentimetergenau gemessen werden, nur so genau sind wie die Platzierung der Basis. Jede Verschiebung der absoluten Basisposition wird sich auch in den Rover-Messungen niederschlagen.
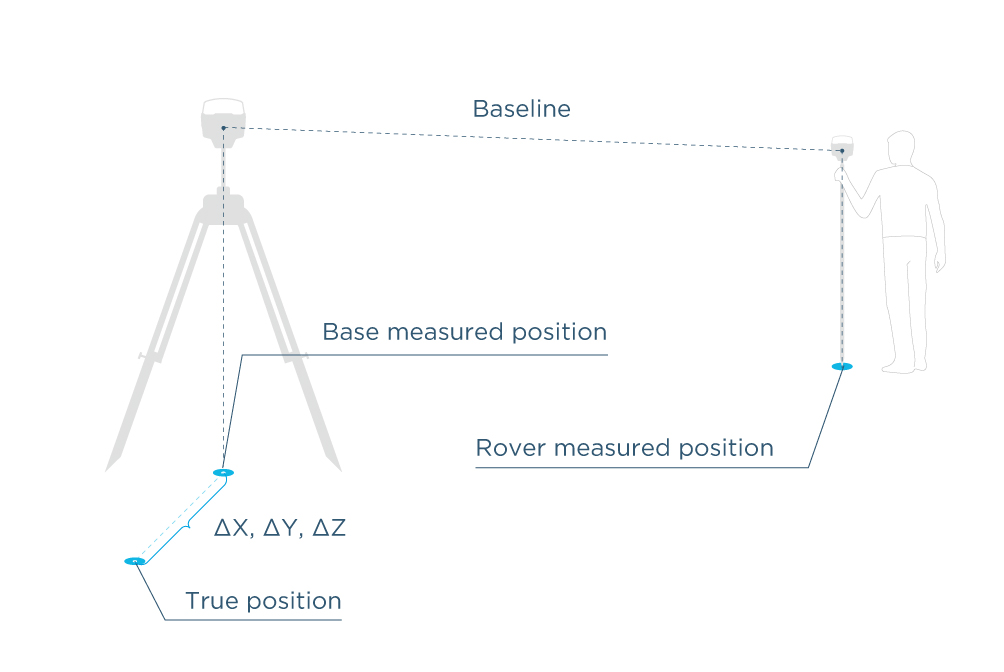
Für einige Anwendungen ist es ausreichend, wenn die Position eines Objekts nur relativ zur Basisstation genau ist, aber für die Vermessung und Kartierung ist es entscheidend, die wahre Position mit hoher absoluter Genauigkeit zu kennen. Um dies zu erreichen, sollte der Fehler in der Position der Basisstation vermieden oder reduziert werden, indem sie über einem bekannten Punkt platziert oder ihre Koordinaten sorgfältig bestimmt werden.
Deshalb ist es wichtig, beim Aufstellen der Basis auf die richtige Positionierung zu achten. Werfen wir einen Blick auf die wichtigsten Konzepte, die Ihnen helfen werden, die Basis für Ihre Bedürfnisse richtig einzurichten.
Koordinatensysteme und Datums
Bevor Sie die Basis für RTK einrichten, müssen Sie sich zunächst Gedanken über das Koordinatensystem machen, das Sie für die Messungen verwenden wollen.
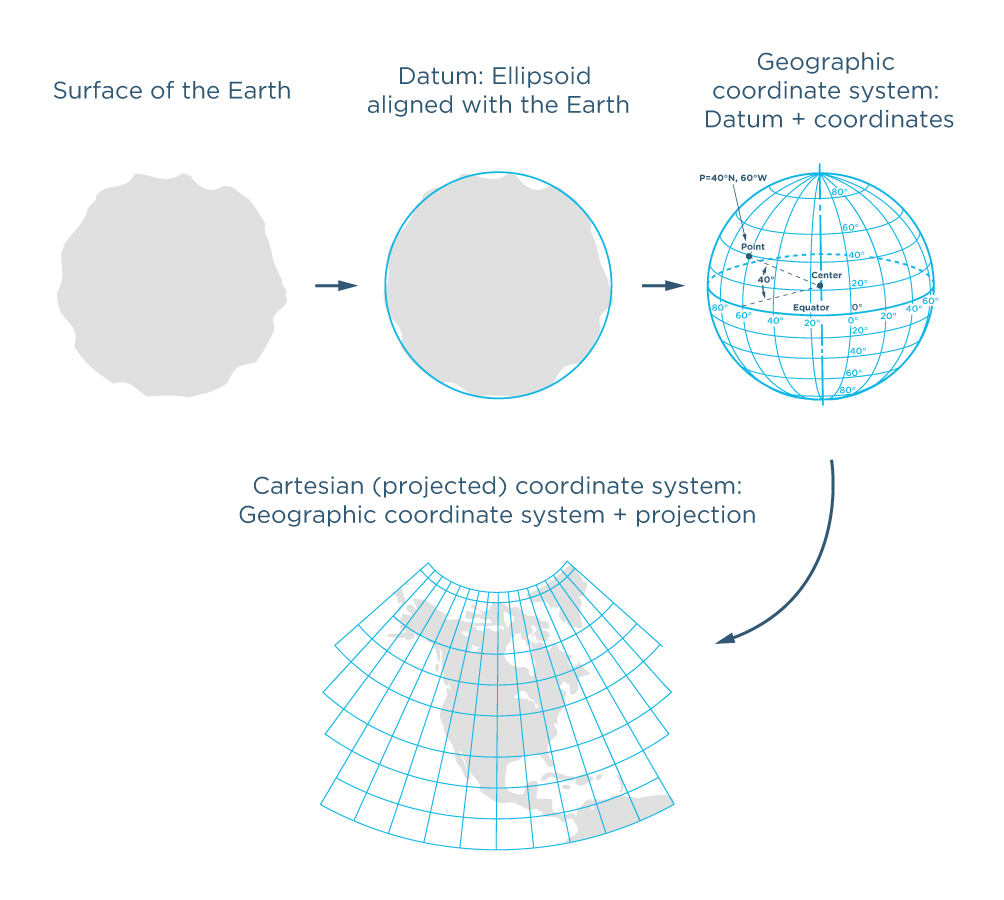
In der Vermessung wird die Position eines Objekts im Raum durch ein Koordinatensystem definiert. Es gibt viele Koordinatensysteme, die für unterschiedliche Anwendungen und Länder entwickelt wurden. Die Grundlage eines jeden Koordinatensystems ist das Datum.
Das Datum enthält die Informationen über das mathematische Modell der Erde (Ellipsoid) und dessen Ausrichtung an der Erdoberfläche, die den Bezugsrahmen für die Messungen bildet. Ein Koordinatensystem wird dann verwendet, um die Positionen relativ zum Datum mit Breiten- und Längengraden zu beschreiben. Für eine abgeflachte kartesische Darstellung der Koordinaten wird eine kartografische Projektion angewendet.
Es ist wichtig, das richtige Datum und Koordinatensystem für das Gebiet, in dem Sie arbeiten, zu wählen, damit Ihre Messungen mit den anderen vorhandenen Daten kompatibel sind. Das Mischen von Bezugspunkten ist wie das Mischen von Kilometern und Meilen – Ihre Messungen ergeben keinen Sinn.
Das geforderte Datum und das Koordinatensystem sind in der Regel in der technischen Aufgabe oder in den offiziellen Unterlagen angegeben. In einigen Fällen können Sie das für Ihr Gebiet optimierte Koordinatensystem im EPSG Geodetic Parameter Dataset (auch EPSG-Register genannt) suchen.
Die gesamte Einrichtung endet dann mit der Projekteinrichtung auf Ihrem Rover, die die Angabe eines Koordinatensystems erfordert, das in der Regel auf dem Datum Ihrer Basis basiert.
Erfahren Sie mehr über die Einrichtung der Koordinatensysteme in Emlid Flow & Emlid Flow 360 im Artikel [Einführung in die Koordinatensysteme] (https://docs.emlid.com/emlid-flow/preparing-projects/cs-setup/cs-introduction).
Positionierung
Nachdem Sie ein Koordinatensystem eingerichtet haben, müssen Sie entscheiden, wie Sie die Basiskoordinaten festlegen wollen. Im Allgemeinen gibt es zwei Möglichkeiten, die Position Ihrer Basis festzulegen – geben Sie die bekannten Punktkoordinaten an oder ermitteln Sie den Mittelwert der Position Ihrer Basis in SINGLE.
In beiden Fällen werden die Messungen des Rovers zentimetergenau sein, aber die absolute Genauigkeit hängt immer von der Genauigkeit der Basisposition ab. Je nach Methode der Basiseinrichtung können Sie eine hohe relative Genauigkeit (Mittelwertbildung in SINGLE) oder absolute Genauigkeit (unter Verwendung der bekannten Koordinaten) erzielen.
Erfahren Sie mehr über absolute und relative Genauigkeit in dem Artikel [Einfache Einführung in die Genauigkeit und Präzision] (https://blog.emlid.com/simple-intro-to-accuracy-and-precision/) in unserem Blog.
Relative Positionierung
Wie bereits erwähnt, dient die Basis bei RTK als Hauptbezugspunkt für den Rover. Die vom Rover gesammelten Koordinaten sind in Bezug auf die Basis immer genau, können aber in Bezug auf das ausgewählte Koordinatensystem ungenau sein. Dies wird als relative Positionierung bezeichnet und tritt auf, wenn die Position der Basisstation im gewählten Bezugsrahmen nicht genau definiert ist.
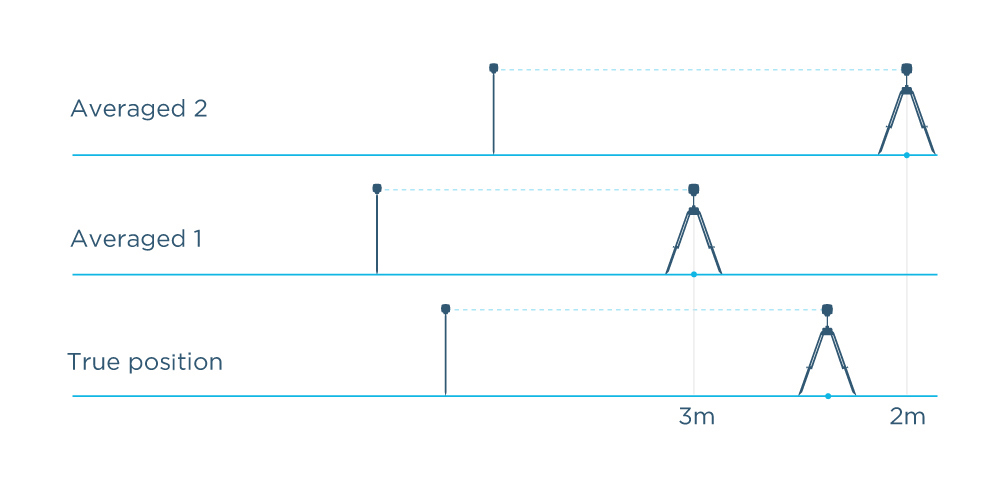
Wenn Sie z. B. die Position der Basis nicht kennen, können Sie sie in SINGLE mitteln. Die Mittelwertbildung erfolgt im Standalone-Modus ohne Verwendung von Korrekturen, und die Position wird mit einer Genauigkeit von mehreren Metern bestimmt. Jedes Mal, wenn Sie die Basisposition vom selben Punkt aus mitteln, können die gemessenen Koordinaten um mehrere Meter von den vorherigen Ergebnissen und von der wahren Position abweichen. Die tatsächliche (absolute) Genauigkeit der Rover-Messungen wird also auf Meterebene liegen. Siehe Abbildung 1 unten.
Diese Art der Einrichtung ist geeignet, wenn Sie die Objekte relativ zueinander messen müssen. Mit dieser Methode lassen sich zum Beispiel Flächen und Entfernungen messen oder ein autonomer Traktor auf der richtigen Spur halten. Um die Einrichtung wiederzuverwenden und dieselben Koordinaten für dieselben Punkte zu erhalten, müssen Sie die Basis über demselben Punkt platzieren (eine Markierung auf dem Boden ist eine gute Idee) und dieselben zuvor ermittelten Basiskoordinaten manuell eingeben oder sie aus den gespeicherten Koordinaten in Emlid Flow auswählen. Andernfalls kann es sein, dass Sie am Ende eine andere Basisposition haben, die nicht zu Ihrem Projekt passt und zu einer Koordinateninkongruenz führt.
Nachdem die Basisposition festgelegt wurde, übermittelt die Basisstation ihre bekannten Koordinaten und die beobachteten Satellitendaten an den Rover. In diesem Fall liefert die Basisstation eine SINGLE-Lösung, da sie ihre eigene Position nicht berechnet und dem Rover lediglich Referenzdaten zur Verfügung stellt. Der Rover kombiniert die von der Basisstation empfangenen Daten mit seinen eigenen Satellitenbeobachtungen, um eine RTK-Lösung zu berechnen, und zeigt in der Regel eine FIX-Lösung an.
Wenn Sie mehr über diese Methode erfahren möchten, lesen Sie unsere Anleitung zur Verwendung der Eingabemethode Durchschnittlicher SINGLE in Emlid Flow.
Absolute Positionierung
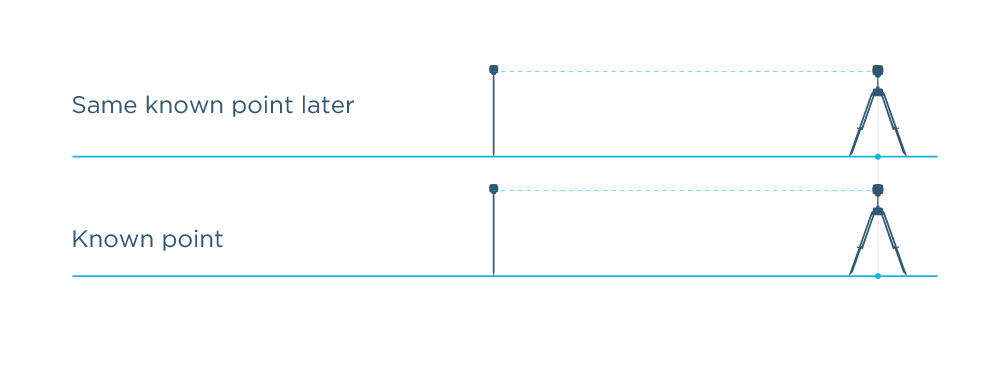
Wenn die mit RTK erfassten Positionen sowohl relativ zur Basis als auch zum gewählten Koordinatensystem genau sind, spricht man von absoluter Positionierung. Zu diesem Zweck müssen die Koordinaten der Basis bekannt sein und manuell eingestellt werden. Durch die Eingabe der bekannten Position der Basis wird Ihre RTK-Einrichtung an der richtigen Stelle auf dem Boden "festgenagelt". Auf diese Weise werden die mit dem Rover gemessenen Positionen in dem gewählten Koordinatensystem auf den Zentimeter genau sein. Siehe Abbildung 2 unten.
Wir empfehlen, die Basis mit dem manuellen Koordinateneingabeverfahren einzurichten, wenn Sie präzise und wiederholbare Ergebnisse in einem ausgewählten Koordinatensystem erhalten möchten. Die Arbeit mit einer bekannten Basisposition ist notwendig, wenn Sie die erfassten Messungen mit anderen Daten verwenden wollen, z. B. wenn Sie die vermessenen Flurstücksgrenzen an das Grundbuchamt übermitteln wollen. Es gibt mehrere Möglichkeiten, bekannte Koordinaten für die Einrichtung der Basis zu erhalten:
- Legen Sie die Basis über den vorhandenen bekannten Punkt oder Referenzpunkt, indem Sie die [Manuelles Koordinateneingabeverfahren] (./setting-up-base-over-known-point/manual.mdx) in der Emlid Flow App verwenden;
- Wenn sich der Benchmark an einem schwer zugänglichen Punkt befindet, Sie aber in der Nähe sind, können Sie die Benchmark-Koordinaten verwenden, um die [Basisverschiebungsfunktion] (./setting-up-base-over-known-point/base-shift.mdx) in Emlid Flow anzuwenden;
- Stellen Sie die Koordinaten Ihrer Basis mit absoluter Zentimetergenauigkeit ein, indem Sie die [Koordinateneingabeverfahren für Mittelwert FIX-Koordinaten] (./setting-up-base-over-known-point/averaged-in-fix.mdx) verwenden, indem Sie sie als Rover einrichten und Korrekturen vom Ntrip-Dienst empfangen;
- Bestimmen Sie die Koordinaten eines Punktes mit dem Arbeitsablauf für statische Verarbeitung in Emlid Studio oder mit Online-Diensten für die Nachbearbeitung wie OPUS, AUSPOS, NRCAN, IBGE.
Weiterlesen:
- Manuelle Einrichtung der Basisposition
- Mittelung der Basisposition in FIX
- Basisverschiebung anwenden
- AUSPOS-Online GPS-Verarbeitungsdienst
- Online Positioning User Service (OPUS) der NOAA
- Canadian Spatial Reference System Precise Point Positioning (CSRS-PPP)
- IBGE-PPP-Online-Dienst für die Nachbearbeitung von GNSS-Daten
- Mittelung der Basisposition in SINGLE