Choix de la méthode de configuration de la base
Vue d'ensemble
La Cinématique en temps réel (RTK, Real-Time Kinematic) est une technique qui améliore la précision du positionnement GNSS en utilisant deux récepteurs : une base fixe avec des coordonnées connues et un rover mobile. Le rover mesure sa position par rapport à la base. Cela signifie que même si les mesures sont effectuées avec une précision centimétrique, les coordonnées du rover ne sont précises que si le placement de la base l'est également. Tout décalage de la position absolue de la base se reflétera également dans les mesures du rover.
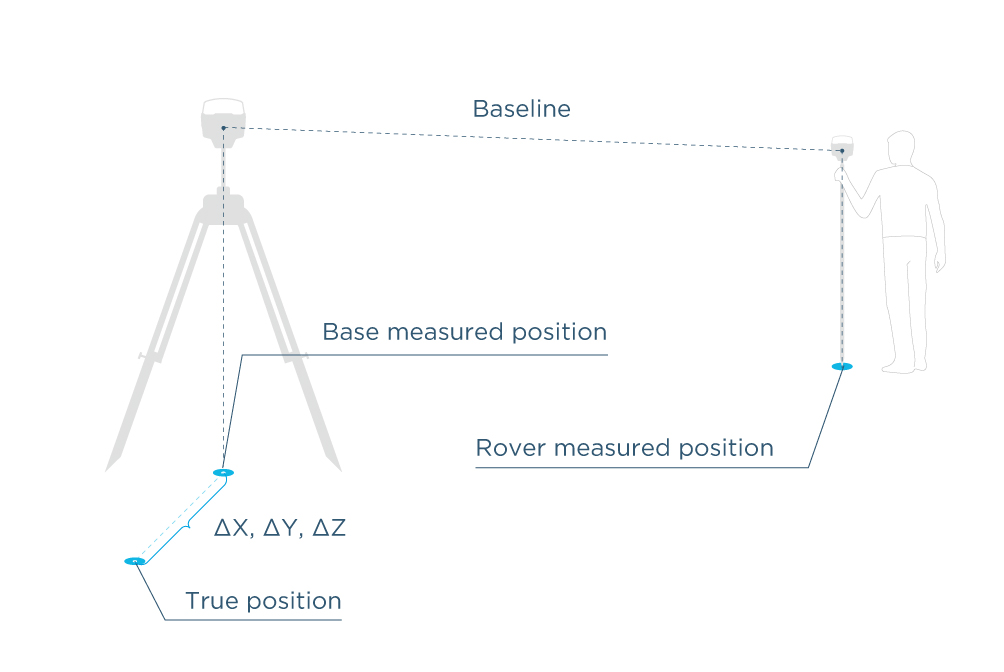
Pour certaines applications, il suffit que la position d'un objet soit précise par rapport à la station de base, mais pour la topographie et la cartographie, il est crucial de connaître la position réelle avec une grande précision absolue. Pour y parvenir, l'erreur de position de la station de base doit être évitée ou réduite en la plaçant sur un point connu ou en déterminant soigneusement ses coordonnées.
C'est pourquoi il est important de prêter une attention particulière au positionnement correct lors de la configuration de la base. Examinons les concepts clés qui vous aideront à comprendre comment configurer correctement la base pour vos besoins.
Systèmes et référentiels de coordonnées
La première chose à considérer avant de configurer la base pour le RTK est le système de coordonnées que vous allez utiliser pour les mesures.
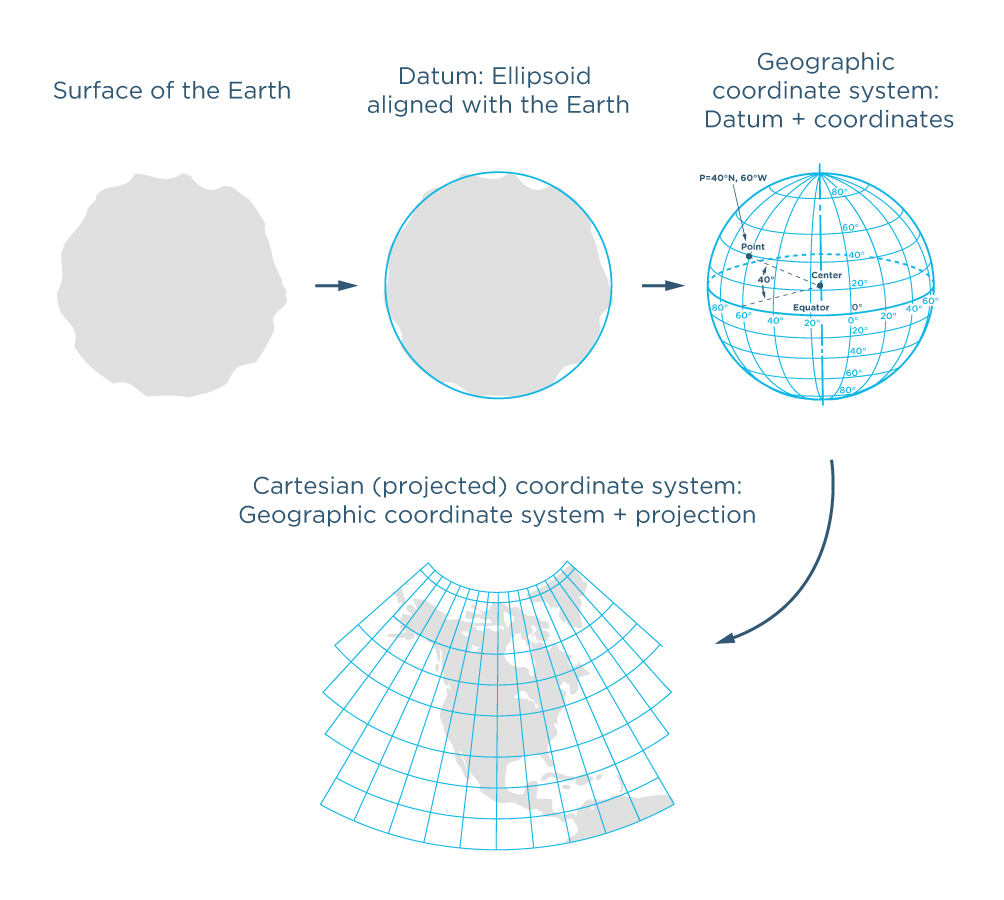
En topographie, la position d'un objet dans l'espace est définie par un système de coordonnées. Il existe de nombreux systèmes de coordonnées conçus pour différentes applications et pays. La base de tout système de coordonnées est le datum.
Le référentiel contient des informations sur le modèle mathématique de la Terre (ellipsoïde) et son alignement avec la surface terrestre, fournissant le cadre de référence pour les mesures. Un système de coordonnées est ensuite utilisé pour décrire les positions par rapport au référentiel avec la latitude et la longitude. Pour une représentation cartésienne aplatie des coordonnées, une projection cartographique est appliquée.
Il est important de choisir le datum et le système de coordonnées corrects pour la zone dans laquelle vous travaillez si vous voulez que vos mesures soient compatibles avec les autres données existantes. Mélanger les référentiels revient à mélanger des kilomètres et des miles—vos mesures n'auront aucun sens.
Le référentiel et le système de coordonnées requis sont généralement indiqués dans l'assignation technique ou la documentation officielle. Dans certains cas, vous pouvez rechercher le système de coordonnées optimisé pour votre zone dans le EPSG Geodetic Parameter Dataset (ou registre EPSG).
La configuration complète se termine ensuite par la configuration du projet sur votre rover, ce qui nécessite de spécifier un système de coordonnées généralement basé sur le référentiel de votre base.
Apprenez-en plus sur la configuration du système de coordonnées dans Emlid Flow & Emlid Flow 360 dans l'article Introduction aux systèmes de coordonnées.
Positionnement
Après avoir configuré un système de coordonnées, vous devez décider comment vous allez définir les coordonnées de la base. En général, il existe deux méthodes pour définir la position de votre base—spécifier les coordonnées du point connu ou faire la moyenne de la position de votre base en mode SINGLE.
Dans les deux cas, les mesures du rover seront précises au centimètre près, mais la précision absolue dépendra toujours de la précision de la position de la base. Selon la méthode de configuration de la base, vous pouvez obtenir une précision relative élevée (moyenne en SINGLE) ou une précision absolue (utilisation des coordonnées connues).
Apprenez-en plus sur la précision absolue et relative dans l'article Introduction simple à la précision et à l'exactitude sur notre blog.
Positionnement relatif
Comme mentionné précédemment, dans le RTK, la base sert de point de référence principal pour le rover. Les coordonnées collectées par le rover sont toujours précises par rapport à la base, mais peuvent ne pas être précises par rapport au système de coordonnées sélectionné. Cela s'appelle le positionnement relatif et se produit lorsque la position de la station de base n'est pas définie avec précision dans le référentiel sélectionné.
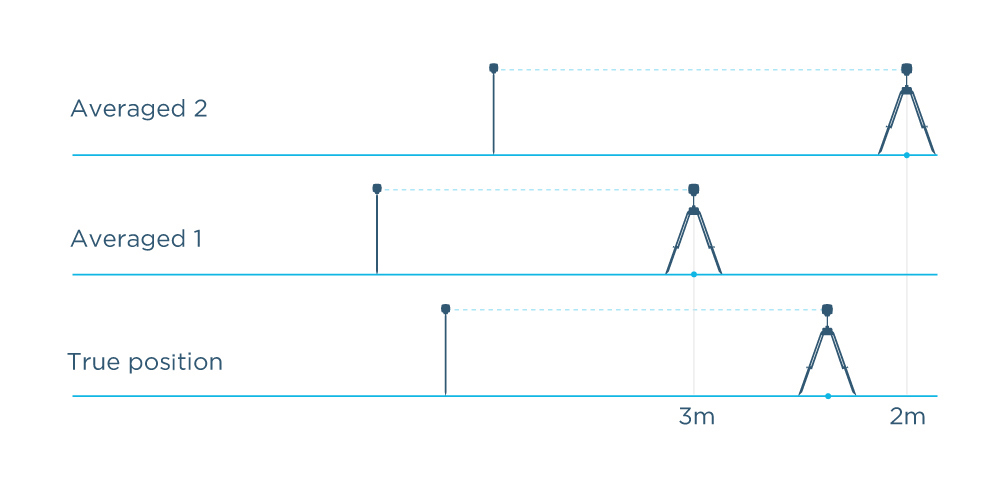
Par exemple, lorsque vous ne connaissez pas la position de la base, vous pouvez la moyenner en mode SINGLE. Le calcul de la moyenne est effectué en mode autonome sans utiliser de corrections, et la position est déterminée avec une précision de plusieurs mètres. Chaque fois que vous calculez la moyenne de la position de la base à partir du même point, les coordonnées mesurées peuvent différer de plusieurs mètres par rapport aux résultats précédents et à la position réelle. Ainsi, la précision réelle (absolue) des mesures du rover sera au niveau du mètre. Voir la Figure 1 ci-dessous.
Ce type de configuration convient lorsque vous devez mesurer les objets les uns par rapport aux autres. Par exemple, cette méthode peut être utilisée pour mesurer des surfaces et des distances, ou pour maintenir un tracteur autonome sur la bonne trajectoire. Pour réutiliser la configuration et obtenir les mêmes coordonnées pour les mêmes points, vous devrez placer la base sur le même point (utiliser une marque au sol est une bonne idée) et entrer manuellement les mêmes coordonnées de base précédemment déterminées ou les sélectionner parmi celles enregistrées dans Emlid Flow. Sinon, vous pourriez vous retrouver avec une position de base différente qui ne correspondra pas à votre projet et entraînera une incompatibilité des coordonnées.
Une fois la position de base définie, la station de base transmet ses coordonnées connues et les données satellites observées au rover. Dans ce cas, la base affiche une solution SINGLE car elle ne calcule pas sa propre position et fournit uniquement des données de référence au rover. Le rover combine les données reçues de la base avec ses propres observations satellites pour calculer une solution RTK et affiche généralement une solution FIX.
Si vous souhaitez en savoir plus sur cette méthode, consultez notre guide sur l'utilisation de la méthode d'entrée des coordonnées moyennes en SINGLE dans Emlid Flow.
Positionnement absolu
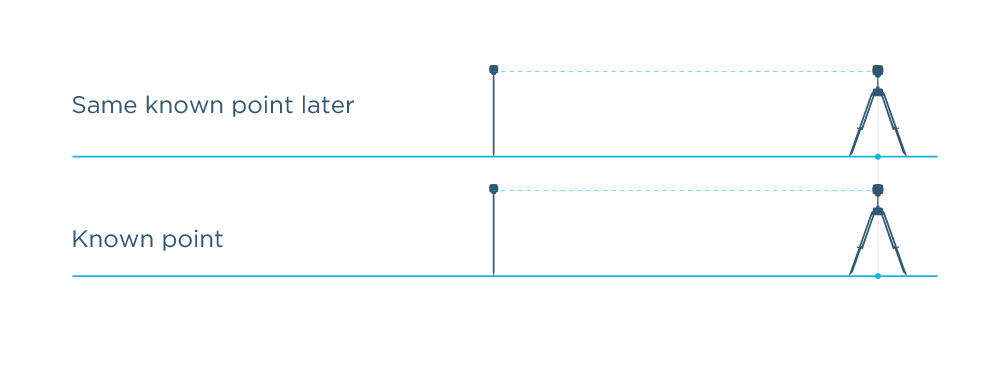
Lorsque les positions collectées en RTK sont précises à la fois par rapport à la base et au système de coordonnées sélectionné, cela s'appelle le positionnement absolu. Pour y parvenir, les coordonnées de la base doivent être connues et définies manuellement. L'entrée de la position connue des « épingles » de base de votre configuration RTK au bon endroit sur le terrain. Ainsi, les positions mesurées avec le rover seront précises et exactes dans le système de coordonnées sélectionné au niveau du centimètre. Voir la Figure 2 ci-dessous.
Nous vous recommandons de configurer la base en utilisant la méthode d'entrée manuelle des coordonnées si vous souhaitez obtenir des résultats précis et répétables dans un système de coordonnées sélectionné. Travailler avec une position de base connue est nécessaire lorsque vous prévoyez d'utiliser les mesures collectées avec d'autres données, par exemple, soumettre les limites des parcelles arpentées au registre foncier. Il existe plusieurs façons d'obtenir des coordonnées connues pour configurer la base :
- Placer la base sur un point connu existant ou un repère en utilisant la méthode d'entrée manuelle des coordonnées dans l'application Emlid Flow;
- Si le repère est situé à un endroit difficile d'accès mais que vous êtes à proximité, vous pouvez utiliser les coordonnées du repère pour appliquer la fonction de décalage de la base dans Emlid Flow ;
- Définissez les coordonnées de votre base avec une précision absolue au centimètre en utilisant la méthode d'entrée des coordonnées moyennes en FIX en la configurant comme un rover et en recevant des corrections du service NTRIP;
- Déterminer les coordonnées d'un point en utilisant le flux de travail de traitement statique dans Emlid Studio ou des services de post-traitement en ligne tels que OPUS, AUSPOS, NRCAN, IBGE.
Lectures complémentaires :
- Configuration manuelle de la position de la base
- Moyenne des positions de base en FIX
- Application du décalage de la base
- AUSPOS—Service de traitement GPS en ligne
- Service d'utilisateur de positionnement en ligne de la NOAA (OPUS)
- Système canadien de référence spatiale pour le positionnement précis (CSRS-PPP)
- IBGE-PPP—Service en ligne pour le post-traitement des données GNSS
- Moyenne des positions de base en SINGLE