Moyennage de la position de la base en FIX
Ce guide explique comment utiliser la méthode d'entrée des coordonnées Averaged FIX dans l'application Emlid Flow pour obtenir les coordonnées d'un point connu et configurer votre base dessus.
Vue d'ensemble
La méthode Averaged FIX vous permet de déterminer les coordonnées de la base avec une précision absolue au centimètre. Dans ce cas, votre base agit comme un rover qui reçoit les données de correction d'un service NTRIP via Internet.
Vous pouvez découvrir comment obtenir des corrections à partir d'un service NTRIP dans le guide Utilisation d'un service NTRIP.
Flux de travail
Placement de la base sur le terrain
Pour placer votre station de base sur le terrain, suivez les recommandations ci-dessous.
Vue dégagée du ciel sans aucun obstacle
La base Reach doit avoir une vue dégagée du ciel à 30 degrés au-dessus de l'horizon. Il ne doit y avoir aucun obstacle pouvant bloquer la vue comme des bâtiments, des arbres, des voitures, des humains, des ordinateurs portables, etc.
Regardez les 2 images ci-dessous. L'image de gauche illustre les conditions souhaitables pour l'emplacement de Reach. Celle de droite est un exemple de mauvaises conditions environnantes telles qu'une vue réduite du ciel, des obstructions possibles ou de la végétation à proximité.

Exemples d'environnements recommandés pour le placement de Reach :
- champ
- sommet de la colline
- toit
Exemples d'environnements défavorables pour le placement de Reach :
- intérieur
- zone urbaine
- zone forestière
Pas d'électronique à proximité
Les appareils électroniques peuvent produire des bruits RF pouvant affecter la réception du signal GNSS. Éloignez tous les appareils électroniques le plus possible de Reach.
Mesure du décalage de hauteur de l'antenne
Lorsque vous placez votre Reach sur le terrain, assurez-vous que votre appareil Reach est placé précisément au-dessus du point marqué sur le trépied et nivelé. Lorsque vous configurez les coordonnées de base manuellement, vous devez mesurer le décalage de hauteur de l'antenne. Suivez les étapes ci-dessous :
-
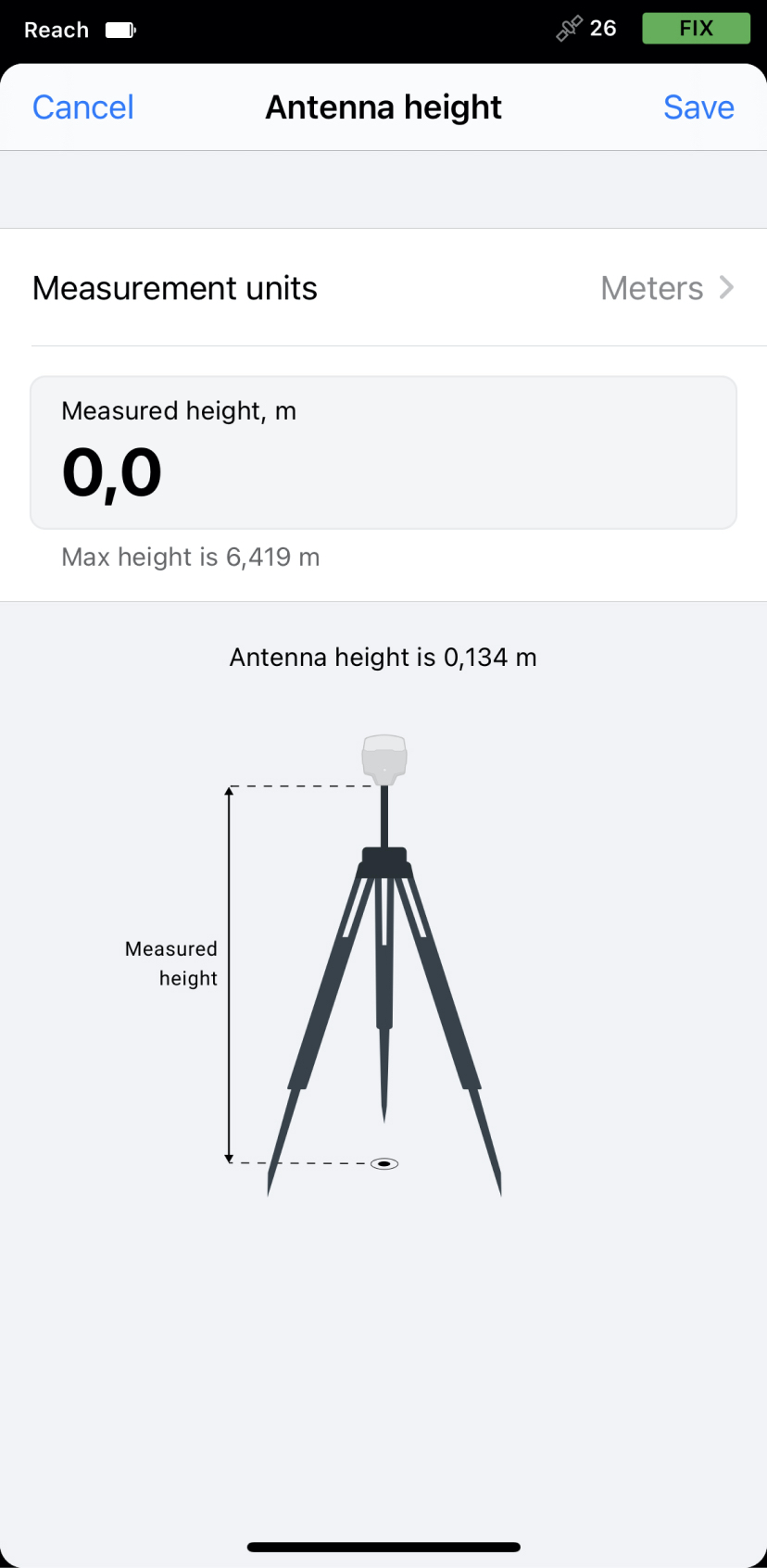
Mesurez la distance du repère au bas de votre Reach (h dans la Figure 1).
-
Spécifiez la distance mesurée dans Emlid Flow. Il calculera automatiquement la hauteur de l'antenne.
astucePour le Reach RS3, la hauteur de l'antenne est la distance de la marque au sol au point central sur le fond du Reach (h dans la Figure 1), point de référence de l'antenne (ARP), plus la hauteur du récepteur au centre de phase de l'antenne (APC), décalage de hauteur de l'antenne. Emlid Flow ajoute automatiquement le décalage de hauteur de l'antenne, qui est de 134 mm.
 Figure 2. Hauteur de l'antenne
Figure 2. Hauteur de l'antenne
Lorsque vous avez placé Reach au-dessus du repère et mesuré la hauteur de l'antenne, vous êtes prêt à configurer la position de base dans l'application Emlid Flow.
Configuration des coordonnées de la base dans Emlid Flow
Une fois que votre base reçoit les corrections RTK du service NTRIP, suivez ces étapes pour obtenir les coordonnées de votre base dans l'application Emlid Flow :
-
Ouvrez l'application Emlid Flow et connectez-vous à votre Reach.
-
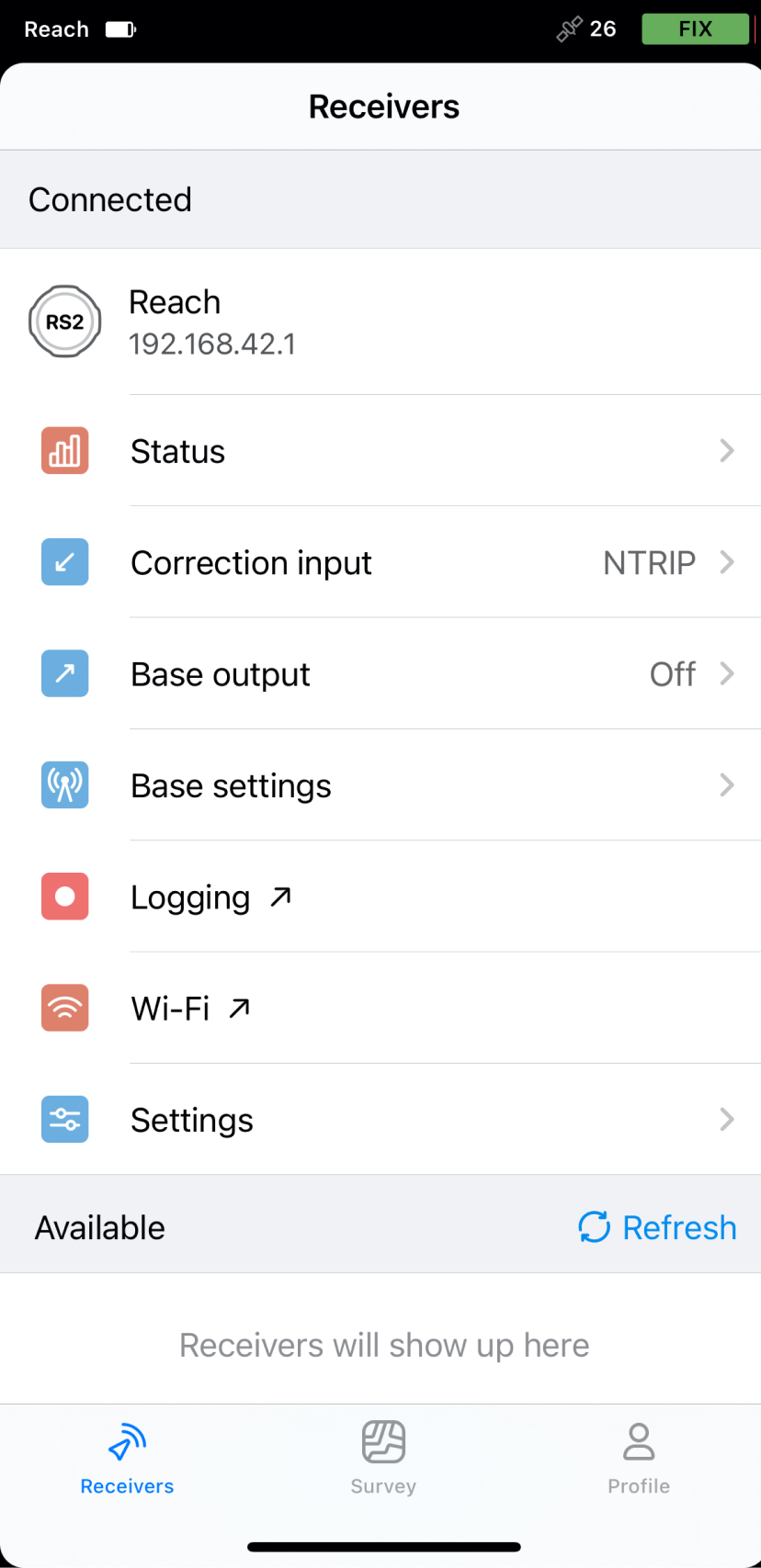
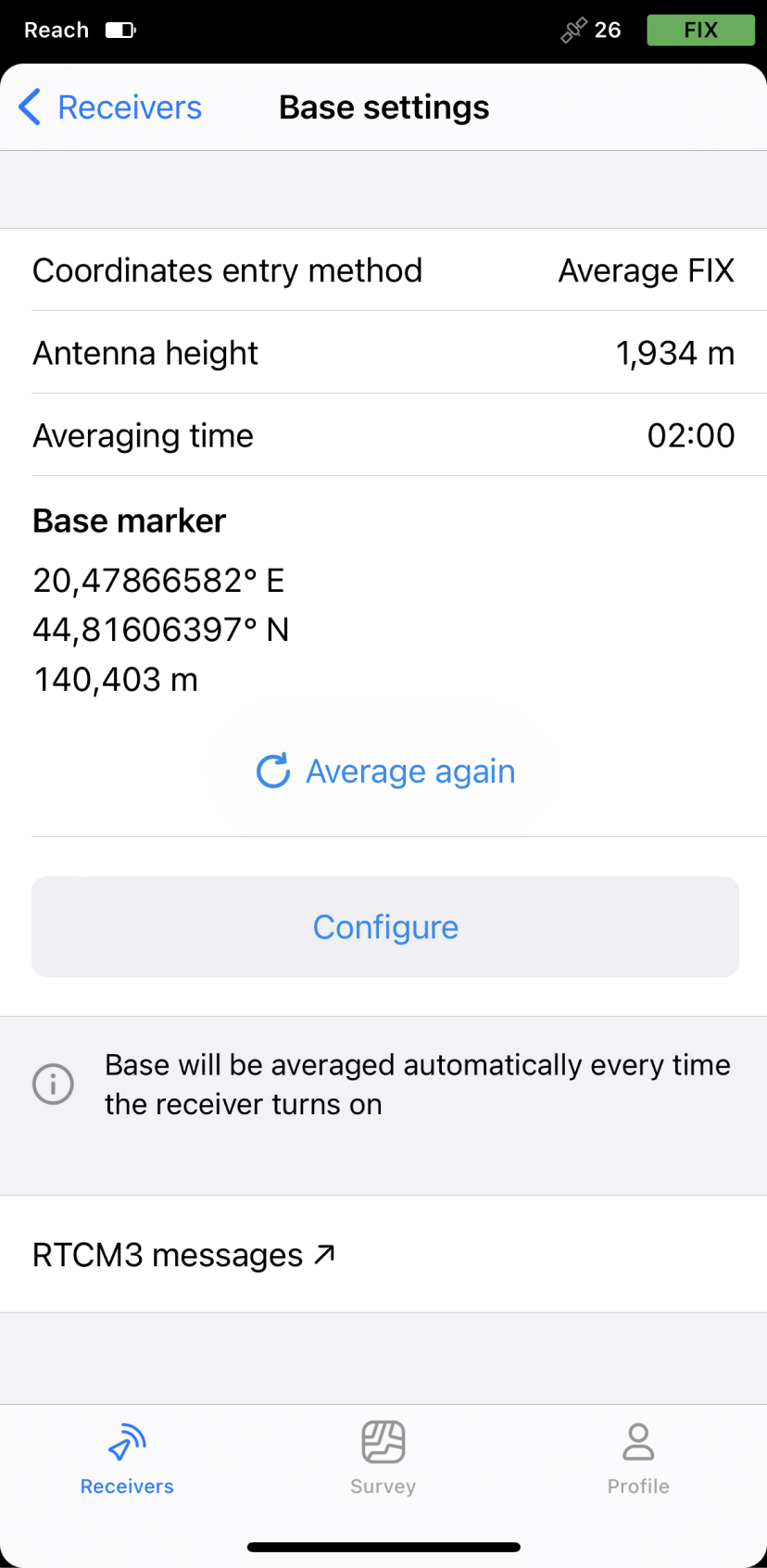
Allez dans Base settings (Paramètres de la base) et appuyez sur Configure (Configurer).
-
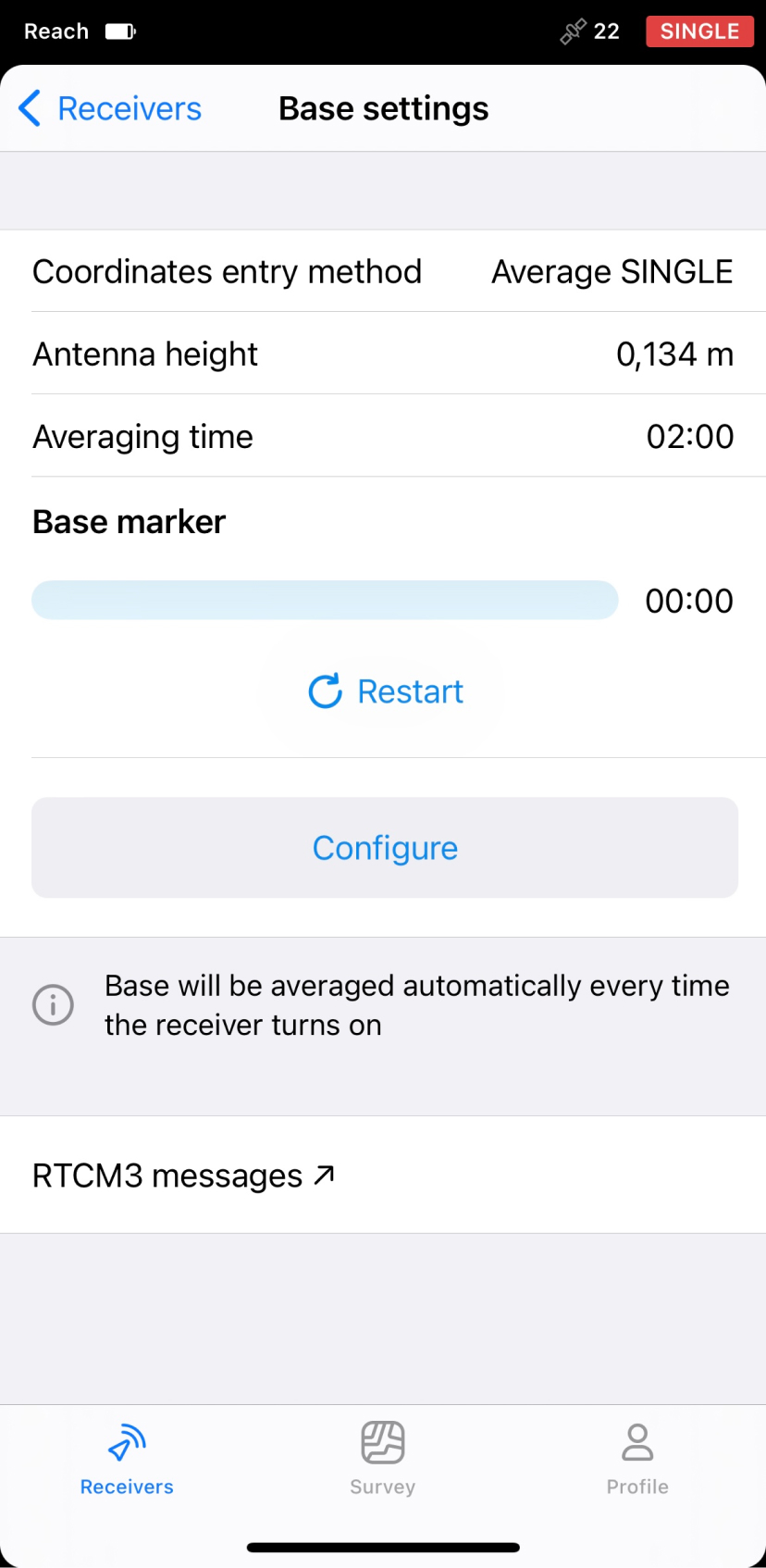
Appuyez sur Coordinates entry method(Méthode d'entrée des coordonnées) et sélectionnez Average FIX (Moyenne FIX) dans le menu.

-
Appuyez sur Antenna height (Hauteur de l'antenne) pour définir la hauteur de l'antenne et l'enregistrer.
-
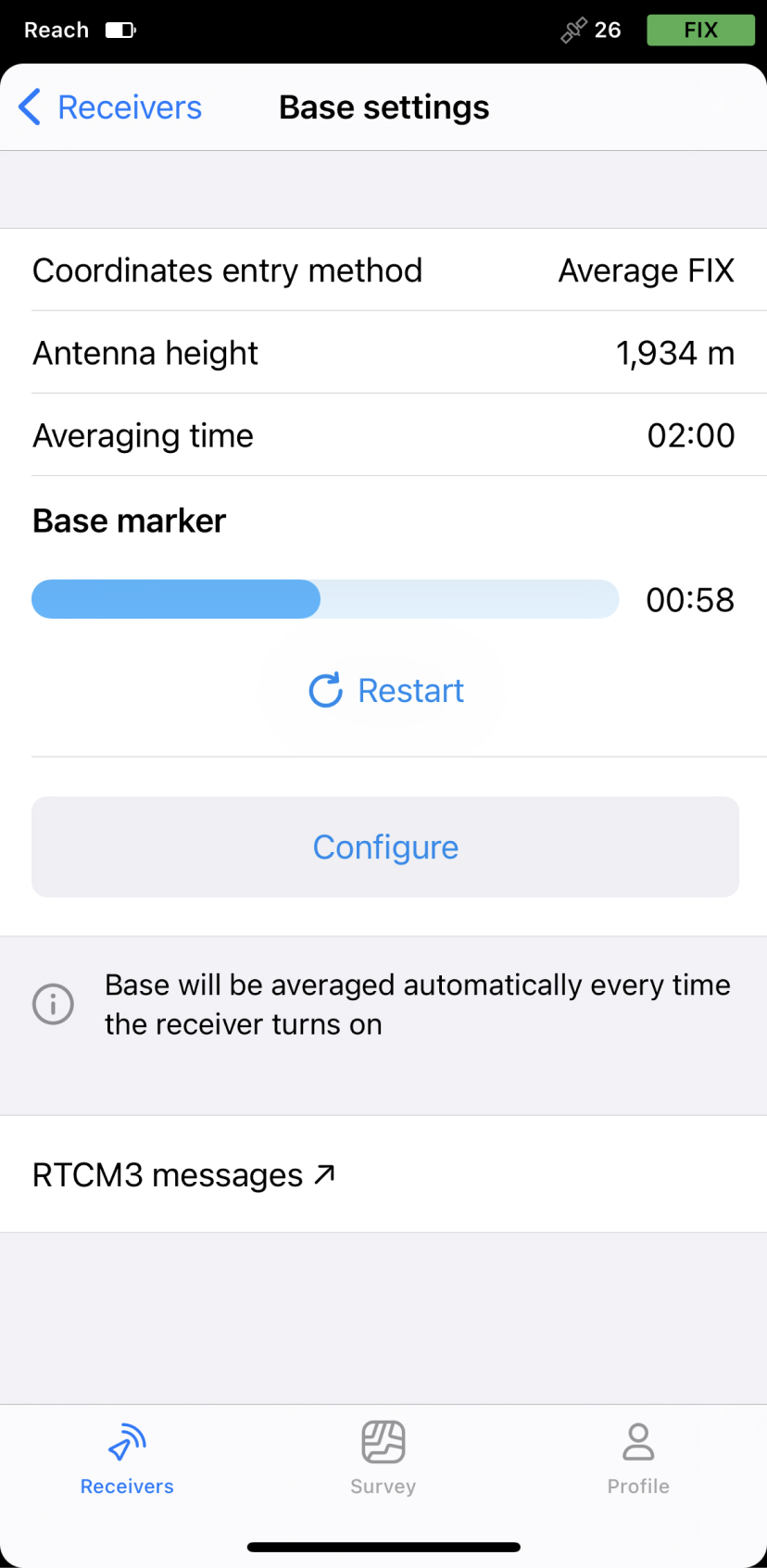
Définissez le temps de calcul de la moyenne et appuyez sur Save (Enregistrer). Après avoir accumulé les données, vous verrez les coordonnées moyennées dans la section Base marker (Marqueur de base).
 remarque
remarqueAprès avoir configuré le système de coordonnées pour votre projet sur le rover, assurez-vous que votre rover et votre base sont dans le même datum en vérifiant la note dans les informations du projet.
Maintenant, les coordonnées de votre base sont définies, et vous pouvez continuer à configurer un projet sur votre rover.