Applica spostamento base
Questa guida spiega come applicare lo spostamento di base in Emlid Flow per calibrare tutti i dati raccolti successivamente nel progetto di rilievo.
Panoramica
Con la funzione di spostamento di base, Emlid Flow aiuta a calibrare i dati del progetto di rilievo in base a un punto: applica uno spostamento XYZ alle coordinate ECEF della base in tempo reale. L'app calcola la differenza tra i punti noti e quelli misurati e applica uno spostamento lineare a tutti i punti rilevati successivamente all'interno di un unico progetto.
Lo spostamento della base può essere applicato indipendentemente dal
Coordinate system is a coordinate-based local, regional or global system used to locate geographical entities. A spatial reference system defines a specific map projection, as well as transformations between different spatial reference systems.
Coordinate system is a coordinate-based local, regional or global system used to locate geographical entities. A spatial reference system defines a specific map projection, as well as transformations between different spatial reference systems.
La funzione di spostamento di base aiuta a calibrare i dati di rilievo quando c'è una differenza tra le coordinate della base note e quelle attuali. Potrebbe servire nei seguenti casi:
- Quando non è pratico posizionare la base su un punto di riferimento permanente (PSM). Ad esempio, non è possibile fornire una visuale sgombra sul cielo nell'area, il che potrebbe compromettere la qualità delle registrazioni di base.
- Quando si supera la linea di basee si deve riposizionare la base.
Baseline is the distance between a rover and a base. If the baseline is bigger than recommended, the solution will be less accurate, the fix time will be longer or it won't be calculated at all.
Lo spostamento calcolato viene memorizzato negli attributi di un determinato progetto di rilievo, si applica a tutti i punti rilevati successivamente e non può essere applicato automaticamente a un altro progetto.
Calibrare la posizione della base rispetto a un PSM
- Emlid Flow
Questo flusso di lavoro descrive il caso in cui si desidera effettuare il rilievo del campo utilizzando un punto di riferimento permanente situato in un luogo difficile da raggiungere. Non è comodo installare un treppiede in quest'area o lasciare la base incustodita. Oppure la visuale del cielo è semplicemente limitata, il che potrebbe compromettere la qualità dei registri della base. In questo caso, la funzione di spostamento di base è utile: puoi posizionare la base in condizioni adeguate vicino al punto di riferimento permanente, raccogliere il punto di riferimento permanente con un
Rover is one of the two GNSS receivers that is used for collecting data in RTK or PPK scenarios. Rover is a moving unit: the surveyor uses rover to record the points, while rover receives the corrections from the static base.
In questo caso, bastano due punti nel progetto:
- Un punto noto, ovvero il PSM con cui si desidera effettuare la calibrazione.
- Un punto misurato, ovvero lo stesso PSM rilevato con un roversul campo.
Rover is one of the two GNSS receivers that is used for collecting data in RTK or PPK scenarios. Rover is a moving unit: the surveyor uses rover to record the points, while rover receives the corrections from the static base.
Per calcolare e applicare lo spostamento di base sui dati del progetto di rilievo, segui questi passaggi:
-
Posizionare la base e calcolare la media della sua posizione in
SINGLE.Solution status defines the precision that can be achieved at the moment. There are three solution statuses you can see when working with Reach devices.
SINGLE means that the rover has found a solution relying on its own receiver and base corrections are not applied. Precision in standalone mode is usually at the several-meter level.
FLOAT means that the rover receives corrections from the base but cannot resolve all ambiguities, and in this case, the precision is usually at the submeter-level.
FIX means that the rover using corrections from the base resolved the ambiguities in its positional calculation and achieved the solution with the centimeter-level precision.
suggerimentoPer saperne di più sul posizionamento della base, consultare le guide Posizionamento e Scelta del metodo di configurazione della base.
-
Configurare la comunicazione RTK tra la base e il
rovere attendere lo statoRover is one of the two GNSS receivers that is used for collecting data in RTK or PPK scenarios. Rover is a moving unit: the surveyor uses rover to record the points, while rover receives the corrections from the static base.
FIX.Solution status defines the precision that can be achieved at the moment. There are three solution statuses you can see when working with Reach devices.
SINGLE means that the rover has found a solution relying on its own receiver and base corrections are not applied. Precision in standalone mode is usually at the several-meter level.
FLOAT means that the rover receives corrections from the base but cannot resolve all ambiguities, and in this case, the precision is usually at the submeter-level.
FIX means that the rover using corrections from the base resolved the ambiguities in its positional calculation and achieved the solution with the centimeter-level precision.
suggerimentoPer saperne di più, consulta le seguenti guide:
-
Creare un progetto di rilievo in Emlid Flow.
-
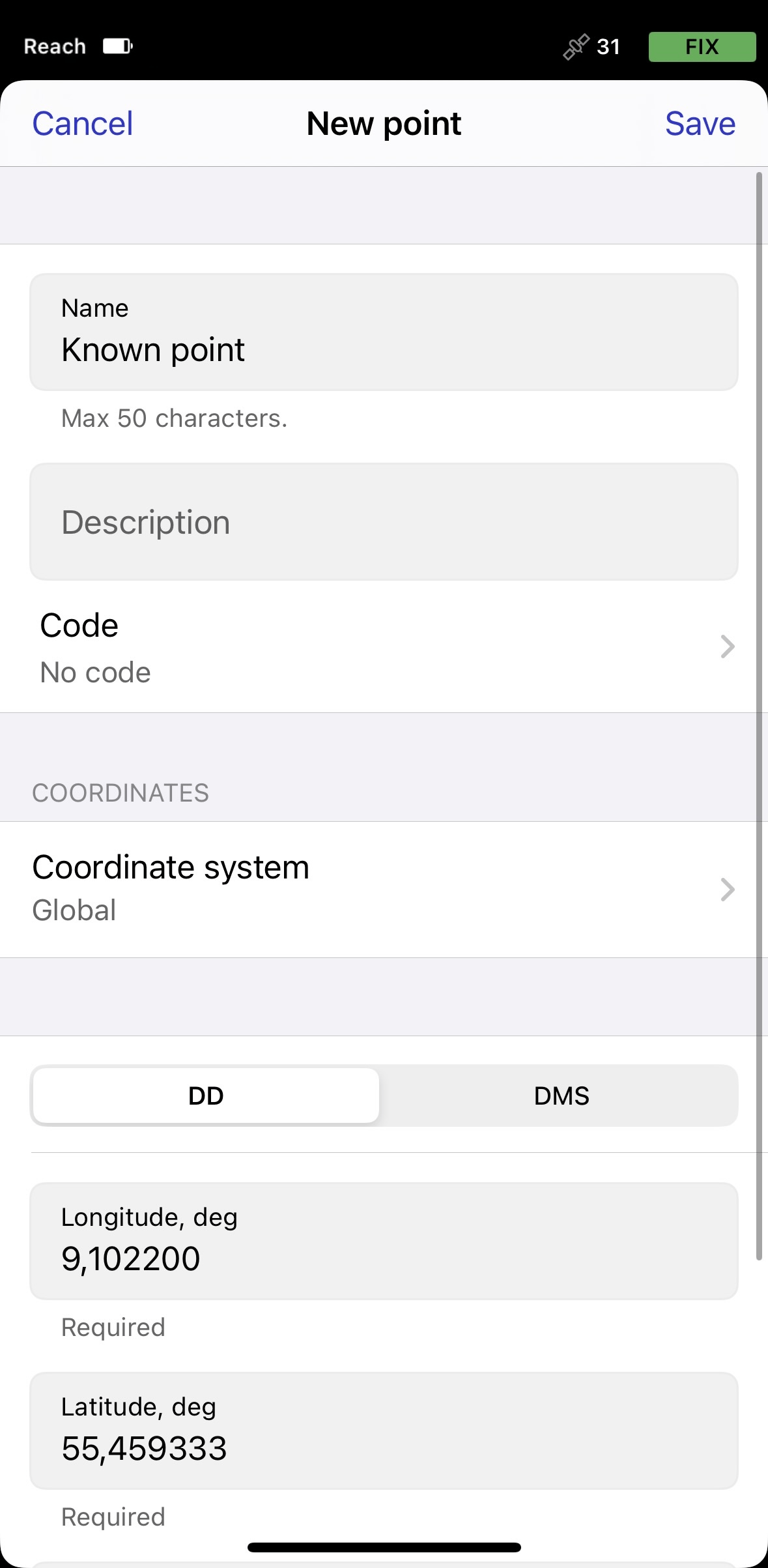
Aggiungere manualmente un punto con le coordinate del proprio PSM e salvarlo. Questo sarà un punto noto.
noteÈ anche possibile farlo in seguito nella schermata Spostamento base, toccare Add a point (Aggiungi un punto) e inserire le coordinate del proprio PSM.
-
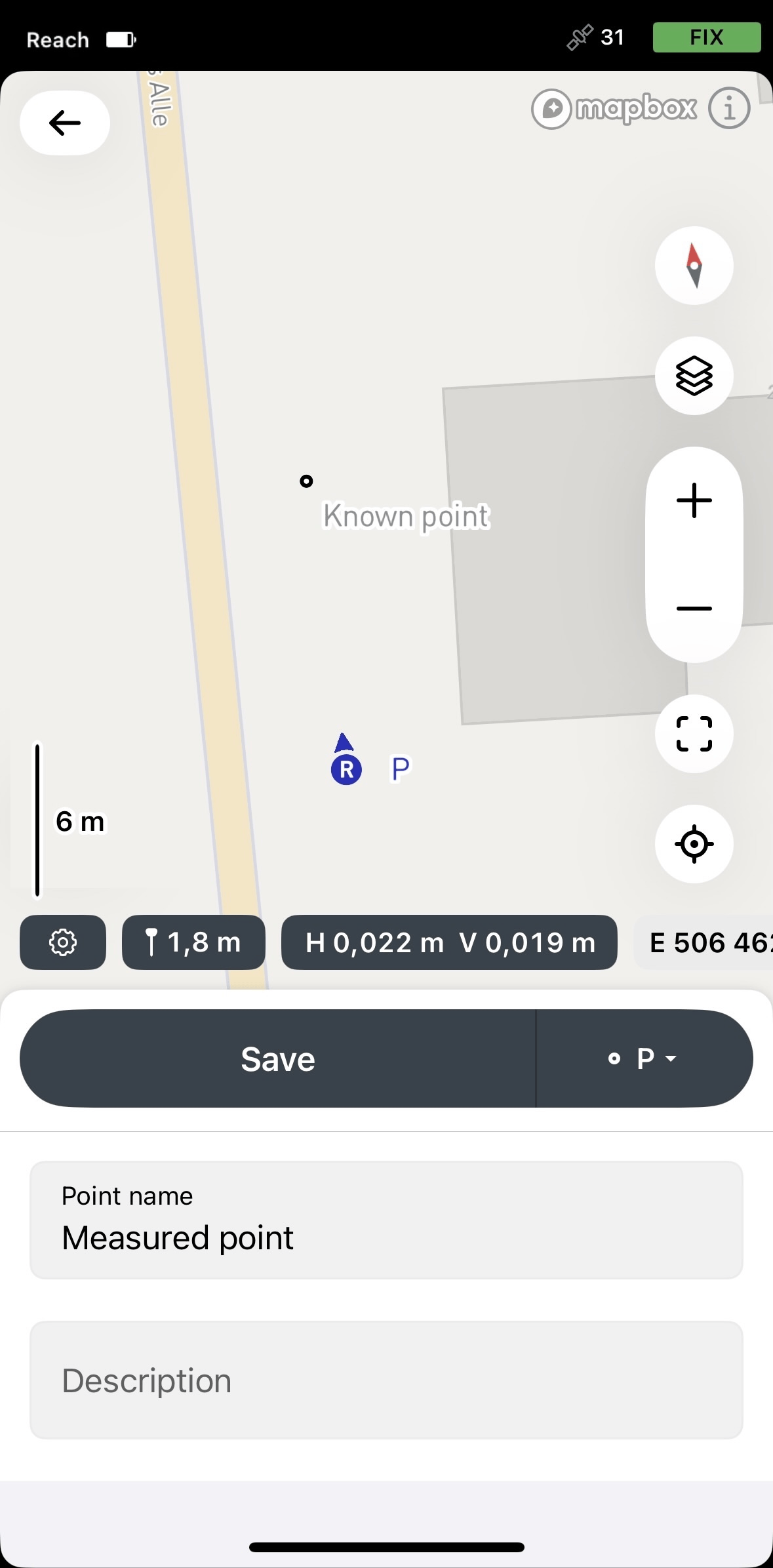
Posizionare il
roversopra il PSM e rilevarlo. Questo sarà un punto misurato.Rover is one of the two GNSS receivers that is used for collecting data in RTK or PPK scenarios. Rover is a moving unit: the surveyor uses rover to record the points, while rover receives the corrections from the static base.
-
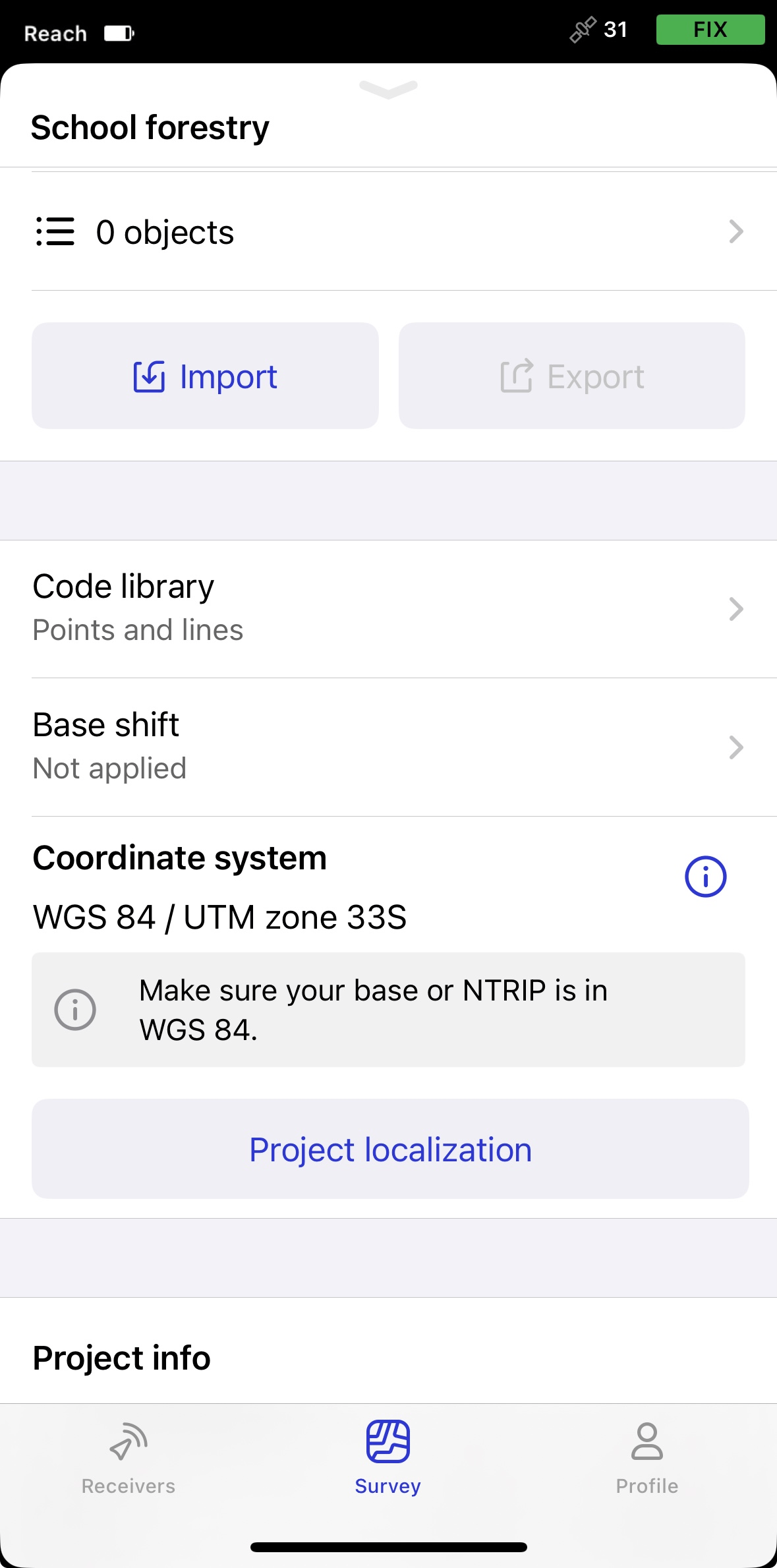
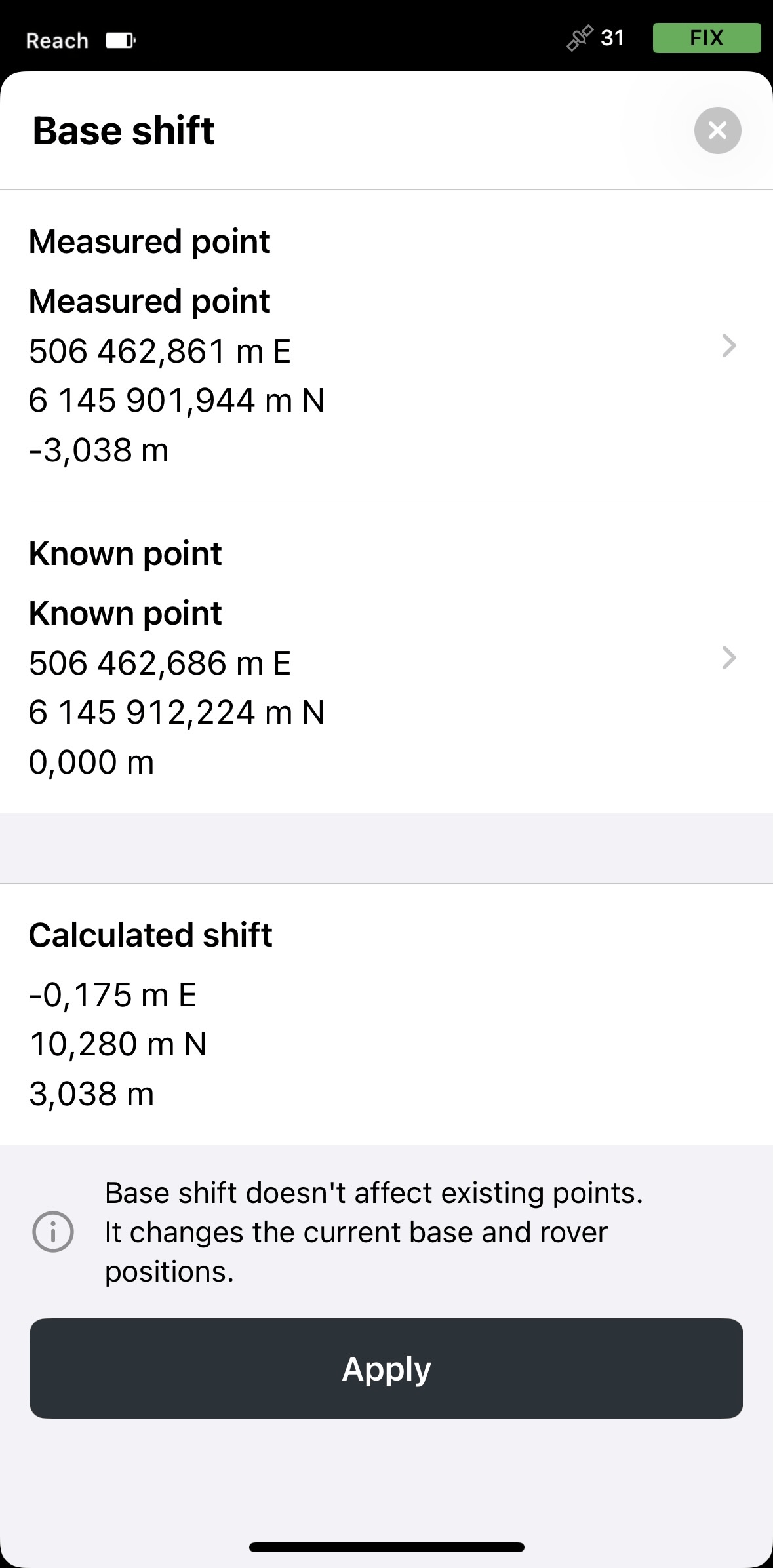
Scorrere verso l'alto il pannello del progetto e toccare Base shift (Spostamento di base).
-
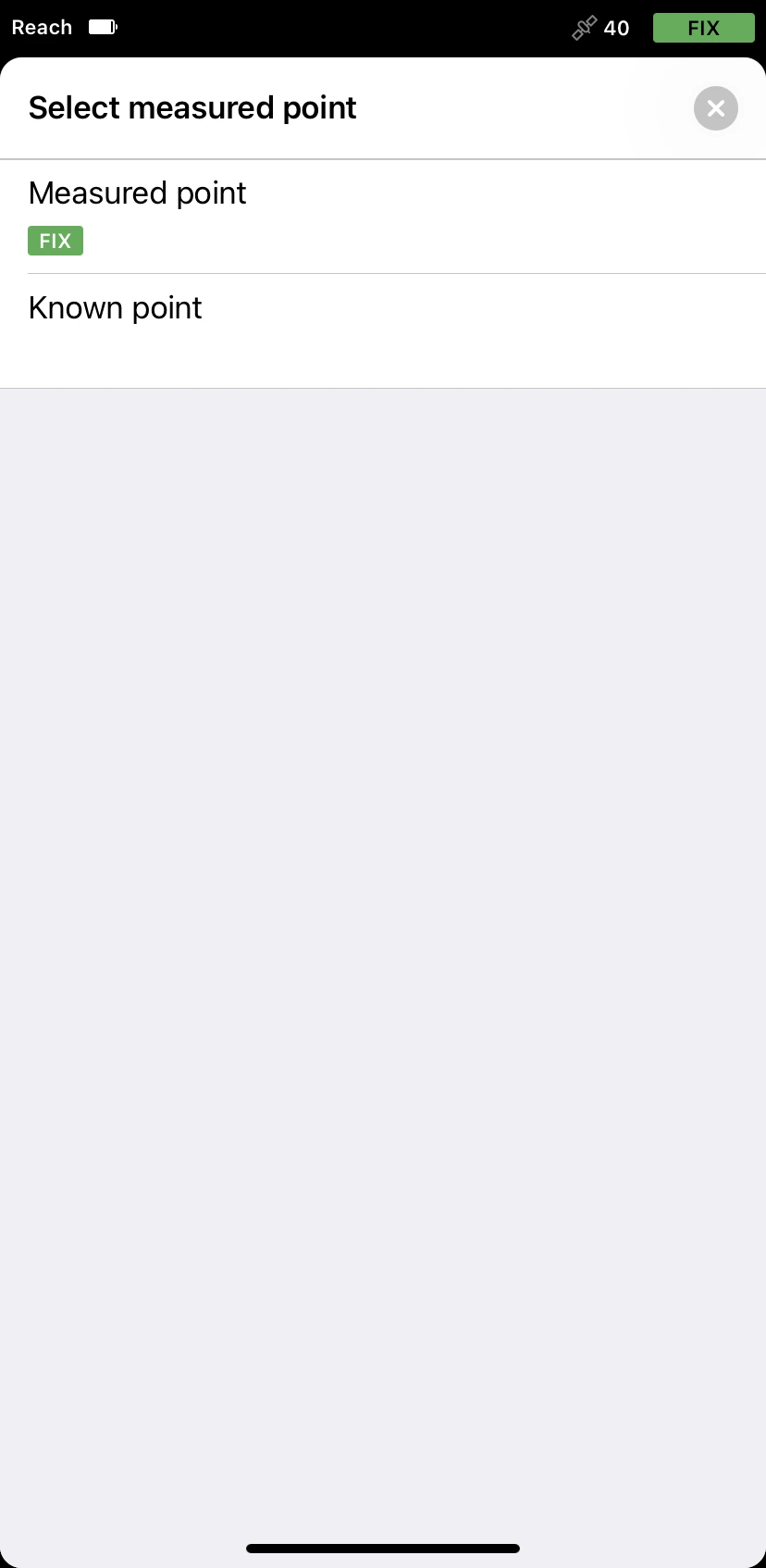
Toccare Measured point (Punto misurato).
-
Selezionare il punto che si è rilevato. Lo abbiamo chiamato 'Punto misurato'.
-
Toccare Known point (Punto noto).
-
Selezionare il punto con le coordinate PSM. Lo abbiamo chiamato 'Punto noto'. Dopodiché, l'app calcolerà lo spostamento.
Se non è stato aggiunto un punto noto in precedenza, toccare Add a point (Aggiungi un punto) e inserire le coordinate del proprio PSM.
- Toccare il pulsante Apply (Applica) per attivare lo spostamento.
Quando lo spostamento viene applicato, vedrai che è attivo nella panoramica del progetto e l'icona del rover sulla mappa appare spostata.
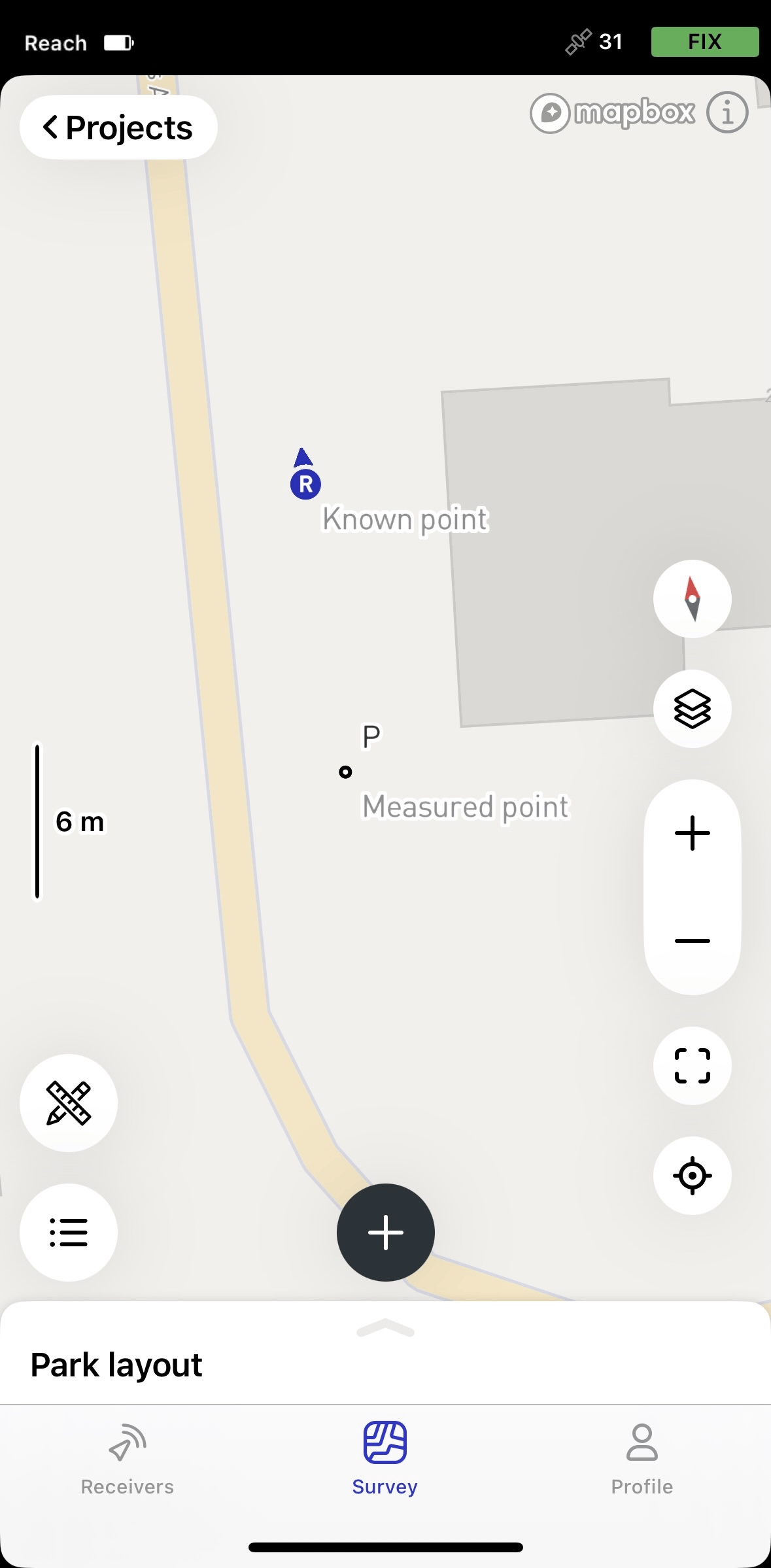
Da questo momento in poi, Emlid Flow inizia ad applicare lo spostamento di base a tutti i punti rilevati in seguito. Nel nostro caso, ciò significa che tutti i punti rilevati dopo lo spostamento di base saranno posizionati esattamente rispetto al punto di riferimento permanente.