Basisverschiebung anwenden
In dieser Anleitung wird erklärt, wie Sie die Basisverschiebung in Emlid Flow anwenden, um alle weiteren erfassten Daten in Ihrem Vermessungsprojekt zu kalibrieren.
Übersicht
Mit der Funktion Basisverschiebung unterstützt Emlid Flow Sie bei der Kalibrierung Ihrer Vermessungsprojektdaten auf der Grundlage eines Punktes – es wird eine XYZ-Verschiebung auf die ECEF-Koordinaten der Basis in Echtzeit angewendet. Die App berechnet die Differenz zwischen den bekannten und gemessenen Punkten und wendet eine lineare Verschiebung auf alle weiteren erfassten Punkte innerhalb eines Projekts an.
Die Basisverschiebung kann unabhängig vom verwendeten
Ein Koordinatensystem ist ein koordinatenbasiertes lokales, regionales oder globales System, das zur Lokalisierung geografischer Einheiten verwendet wird. Ein räumliches Bezugssystem definiert eine bestimmte Kartenprojektion sowie Transformationen zwischen verschiedenen räumlichen Bezugssystemen.
Ein Koordinatensystem ist ein koordinatenbasiertes lokales, regionales oder globales System, das zur Lokalisierung geografischer Einheiten verwendet wird. Ein räumliches Bezugssystem definiert eine bestimmte Kartenprojektion sowie Transformationen zwischen verschiedenen räumlichen Bezugssystemen.
Die Funktion Basisverschiebung hilft Ihnen bei der Kalibrierung der Vermessungsdaten, wenn eine Differenz zwischen den bekannten und den aktuellen Basiskoordinaten besteht. Dies kann in den folgenden Fällen erforderlich sein:
- Wenn es unpraktisch ist, die Basis über einer permanenten Vermessungsmarke (PSM) zu platzieren. Sie können in diesem Bereich beispielsweise keine freie Sicht auf den Himmel bieten, was die Qualität der Basisprotokolle beeinträchtigen könnte.
- Wenn Sie die Basislinieüberschreiten und Ihre Basis verlegen müssen.
Die Basislinie ist der Abstand zwischen einem Rover und einer Basis. Wenn die Basislinie größer als empfohlen ist, wird die Lösung weniger genau, die Fixzeit wird länger oder sie wird überhaupt nicht berechnet.
Die berechnete Verschiebung wird in den Attributen eines bestimmten Vermessungsprojekts gespeichert, gilt für alle weiteren erfassten Punkte und kann nicht automatisch auf ein anderes Projekt angewandt werden.
Kalibrieren Sie die Position Ihrer Basis relativ zu einem PSM
- Emlid Flow
Dieser Arbeitsablauf beschreibt den Fall, dass Sie vor Ort mit einer permanenten Vermessungsmarke an einer schwer zugänglichen Stelle vermessen möchten. Es ist ungünstig, in diesem Bereich ein Stativ zu installieren oder die Basis unbeaufsichtigt zu lassen. Oder es handelt sich einfach nur um eine eingeschränkte Himmelsansicht, die die Qualität der Basisprotokolle beeinträchtigen kann. Hier kommt die Funktion zur Verschiebung der Basis zum Einsatz: Sie können Ihre Basis unter den richtigen Bedingungen in der Nähe der permanenten Vermessungsmarke platzieren, die permanente Vermessungsmarke mit einem
Der Rover ist einer der beiden GNSS-Empfänger, die für die Datenerfassung in RTK- oder PPK-Szenarien verwendet werden. Der Rover ist eine bewegliche Einheit: Der Vermesser benutzt den Rover zur Aufzeichnung der Punkte, während der Rover die Korrekturen von der statischen Basis erhält.
In diesem Fall benötigen Sie nur zwei Punkte im Projekt:
- Ein bekannter Punkt, d. h. das PSM, mit dem Sie kalibrieren möchten.
- Ein gemessener Punkt, d. h. dieselbe PSM, die mit einem Roverim Feld erfasst wurde.
Der Rover ist einer der beiden GNSS-Empfänger, die für die Datenerfassung in RTK- oder PPK-Szenarien verwendet werden. Der Rover ist eine bewegliche Einheit: Der Vermesser benutzt den Rover zur Aufzeichnung der Punkte, während der Rover die Korrekturen von der statischen Basis erhält.
Führen Sie die folgenden Schritte aus, um die Basisverschiebung zu berechnen und auf Ihre Vermessungsprojektdaten anzuwenden:
-
Platzieren Sie Ihre Basis und mitteln Sie ihre Position in
SINGLE.Der Lösungsstatus definiert die Präzision, die derzeit erreicht werden kann. Es gibt drei Lösungsstatus, die Sie bei der Arbeit mit Reach-Geräten sehen können.
SINGLE bedeutet, dass der Rover eine Lösung gefunden hat, die sich auf seinen eigenen Empfänger stützt, und dass keine Basiskorrekturen angewendet werden. Die Präzision im Standalone-Modus liegt in der Regel im Bereich von mehreren Metern.
FLOAT bedeutet, dass der Rover Korrekturen von der Basis erhält, aber nicht alle Mehrdeutigkeiten auflösen kann, und in diesem Fall liegt die Präzision normalerweise im Submeterbereich.
FIX bedeutet, dass der Rover mit Hilfe von Korrekturen von der Basis die Mehrdeutigkeiten in seiner Positionsberechnung beseitigt und die Lösung mit einer Präzision im Zentimeterbereich erreicht hat.
tipWeitere Informationen zur Platzierung der Basis finden Sie in den Anleitungen Platzierung und Einrichtungsmethode für Basis auswählen.
-
Konfigurieren Sie die RTK-Kommunikation zwischen der Basis und dem
Roverund warten Sie aufDer Rover ist einer der beiden GNSS-Empfänger, die für die Datenerfassung in RTK- oder PPK-Szenarien verwendet werden. Der Rover ist eine bewegliche Einheit: Der Vermesser benutzt den Rover zur Aufzeichnung der Punkte, während der Rover die Korrekturen von der statischen Basis erhält.
FIX.Der Lösungsstatus definiert die Präzision, die derzeit erreicht werden kann. Es gibt drei Lösungsstatus, die Sie bei der Arbeit mit Reach-Geräten sehen können.
SINGLE bedeutet, dass der Rover eine Lösung gefunden hat, die sich auf seinen eigenen Empfänger stützt, und dass keine Basiskorrekturen angewendet werden. Die Präzision im Standalone-Modus liegt in der Regel im Bereich von mehreren Metern.
FLOAT bedeutet, dass der Rover Korrekturen von der Basis erhält, aber nicht alle Mehrdeutigkeiten auflösen kann, und in diesem Fall liegt die Präzision normalerweise im Submeterbereich.
FIX bedeutet, dass der Rover mit Hilfe von Korrekturen von der Basis die Mehrdeutigkeiten in seiner Positionsberechnung beseitigt und die Lösung mit einer Präzision im Zentimeterbereich erreicht hat.
tipWeitere Informationen finden Sie in den folgenden Anleitungen:
-
Erstellen Sie ein Vermessungsprojekt in Emlid Flow.
-
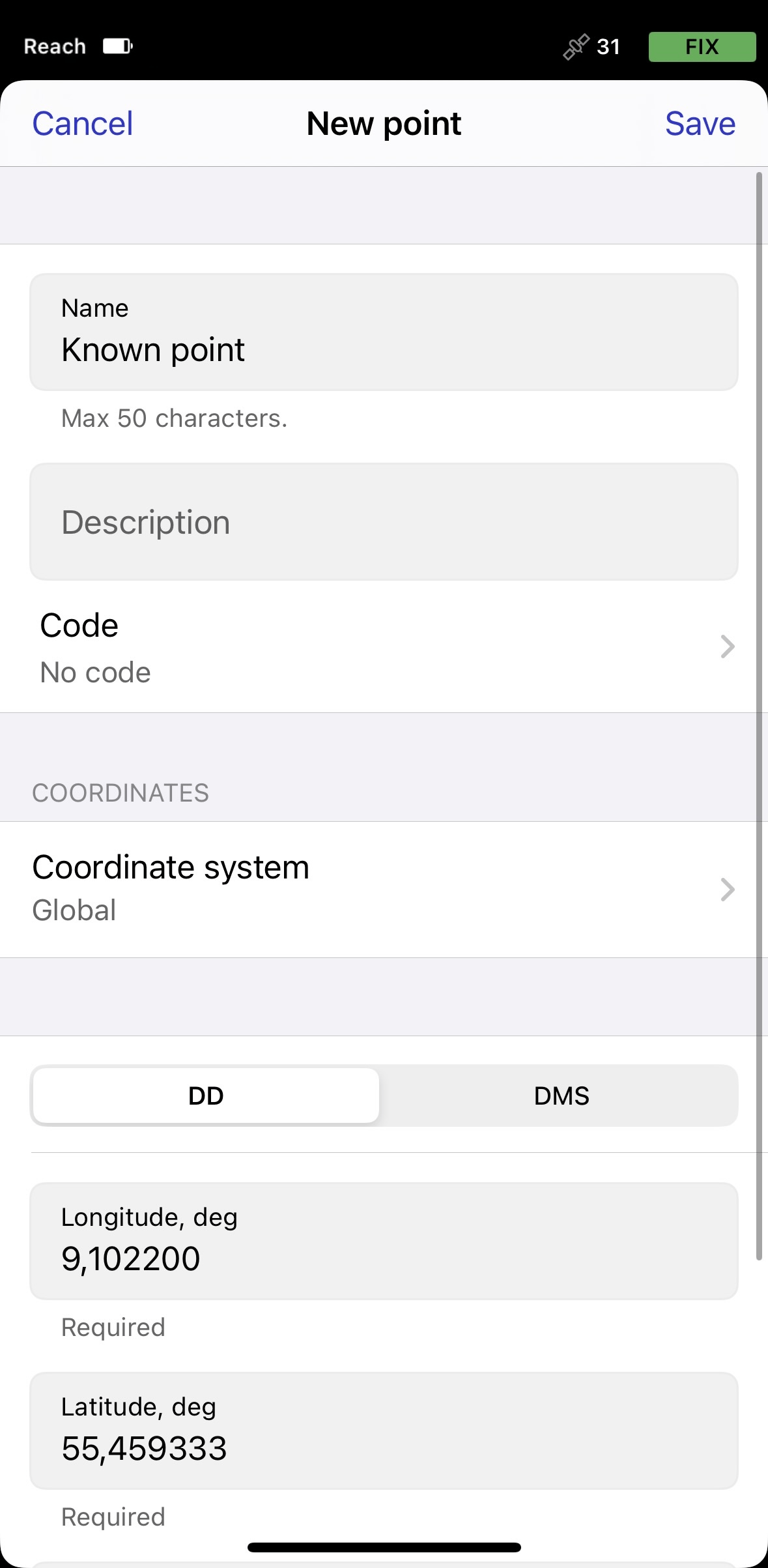
Fügen Sie manuell einen Punkt mit den Koordinaten Ihres PSM hinzu und speichern Sie ihn. Dies wird ein bekannter Punkt sein.
noteSie können dies auch später auf dem Bildschirm Basisverschiebung tun, tippen Sie auf Punkt hinzufügen und geben Sie die Koordinaten Ihres PSM ein.
-
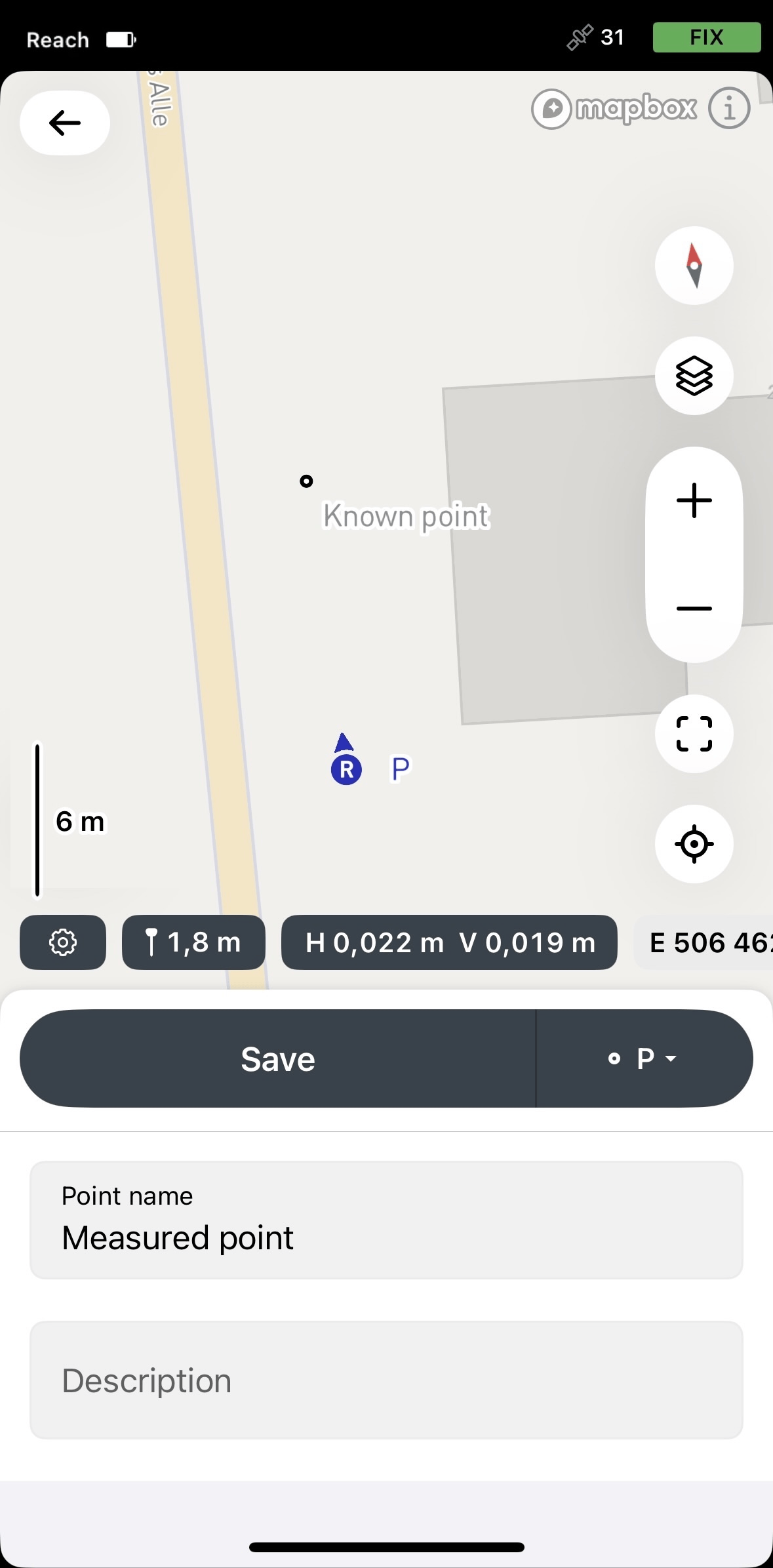
Platzieren Sie den
Roverüber dem PSM und erfassen Sie ihn. Dies wird ein gemessener Punkt sein.Der Rover ist einer der beiden GNSS-Empfänger, die für die Datenerfassung in RTK- oder PPK-Szenarien verwendet werden. Der Rover ist eine bewegliche Einheit: Der Vermesser benutzt den Rover zur Aufzeichnung der Punkte, während der Rover die Korrekturen von der statischen Basis erhält.
-
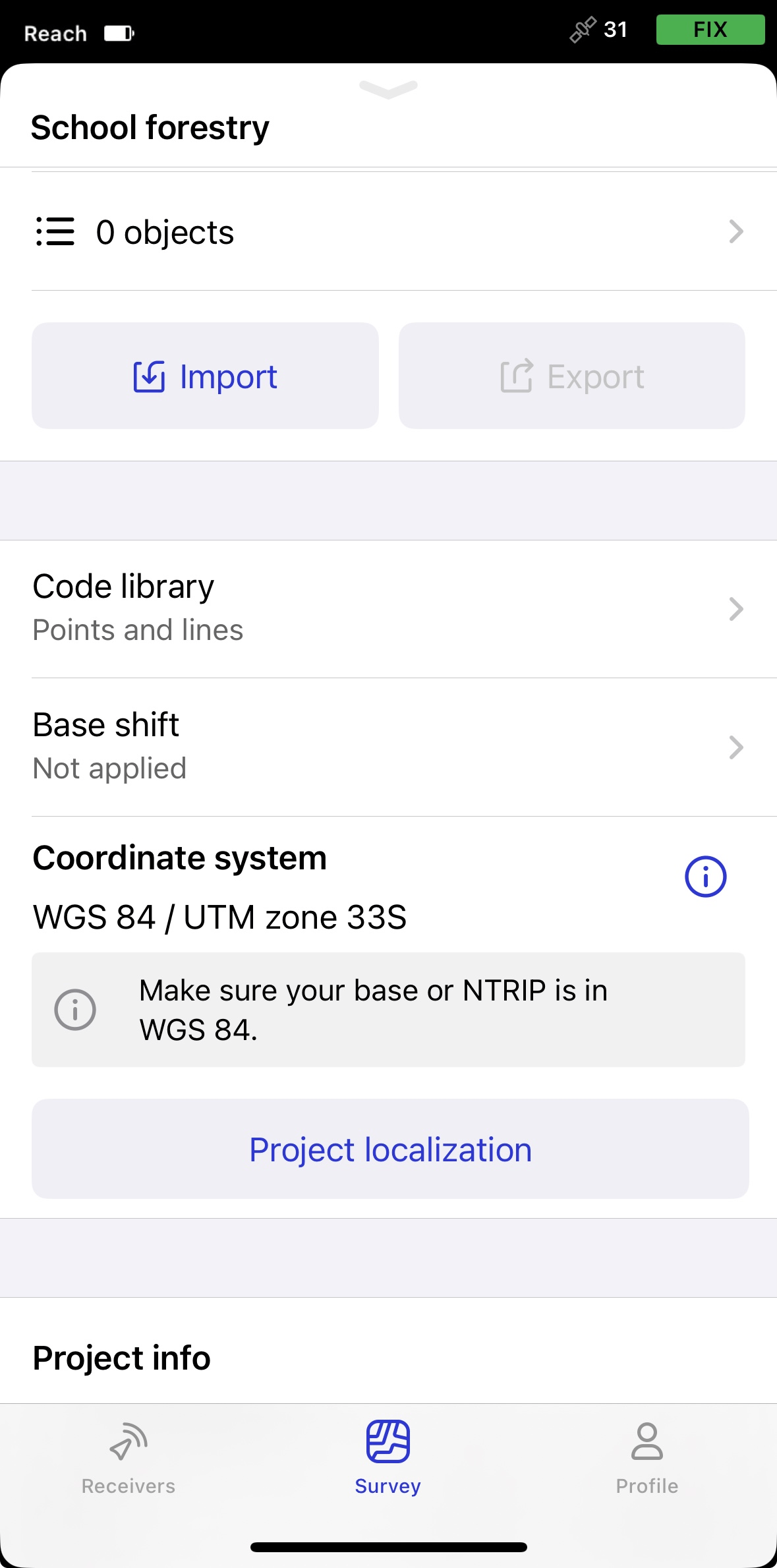
Wischen Sie in der Projektschublade nach oben und tippen Sie auf Basisverschiebung.
-
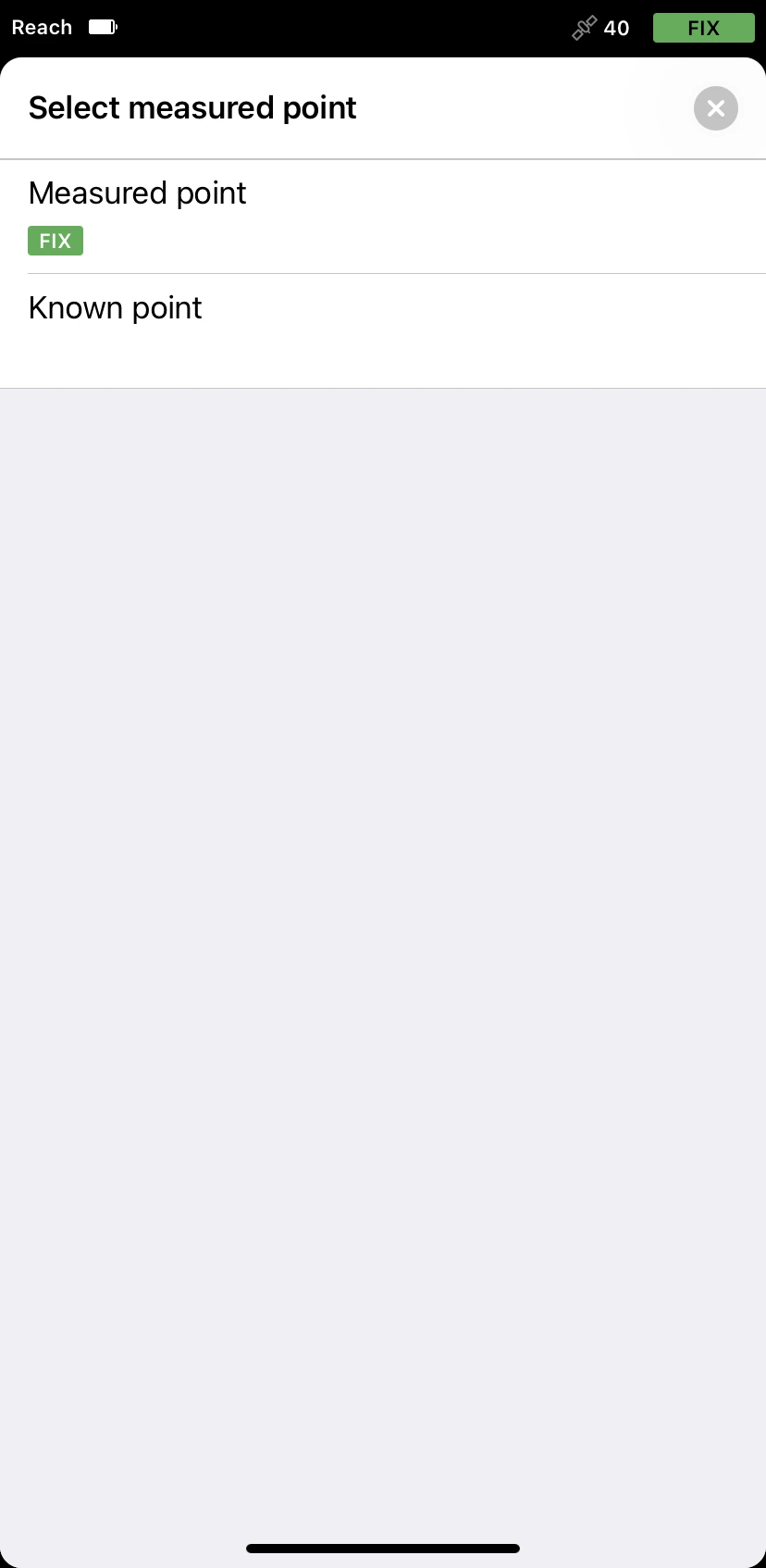
Tippen Sie auf Gemessener Punkt.
-
Wählen Sie den Punkt, den Sie erfasst haben. Wir haben es 'Gemessener Punkt' genannt.
-
Tippen Sie auf Bekannter Punkt.
-
Wählen Sie den Punkt mit den PSM-Koordinaten aus. Wir haben es 'Bekannter Punkt' genannt. Danach wird die App die Verschiebung berechnen.
Wenn Sie zuvor keinen bekannten Punkt hinzugefügt haben, tippen Sie auf Punkt hinzufügen und geben Sie die Koordinaten Ihres PSM ein.
- Tippen Sie auf die Schaltfläche Anwenden, um die Verschiebung zu aktivieren.
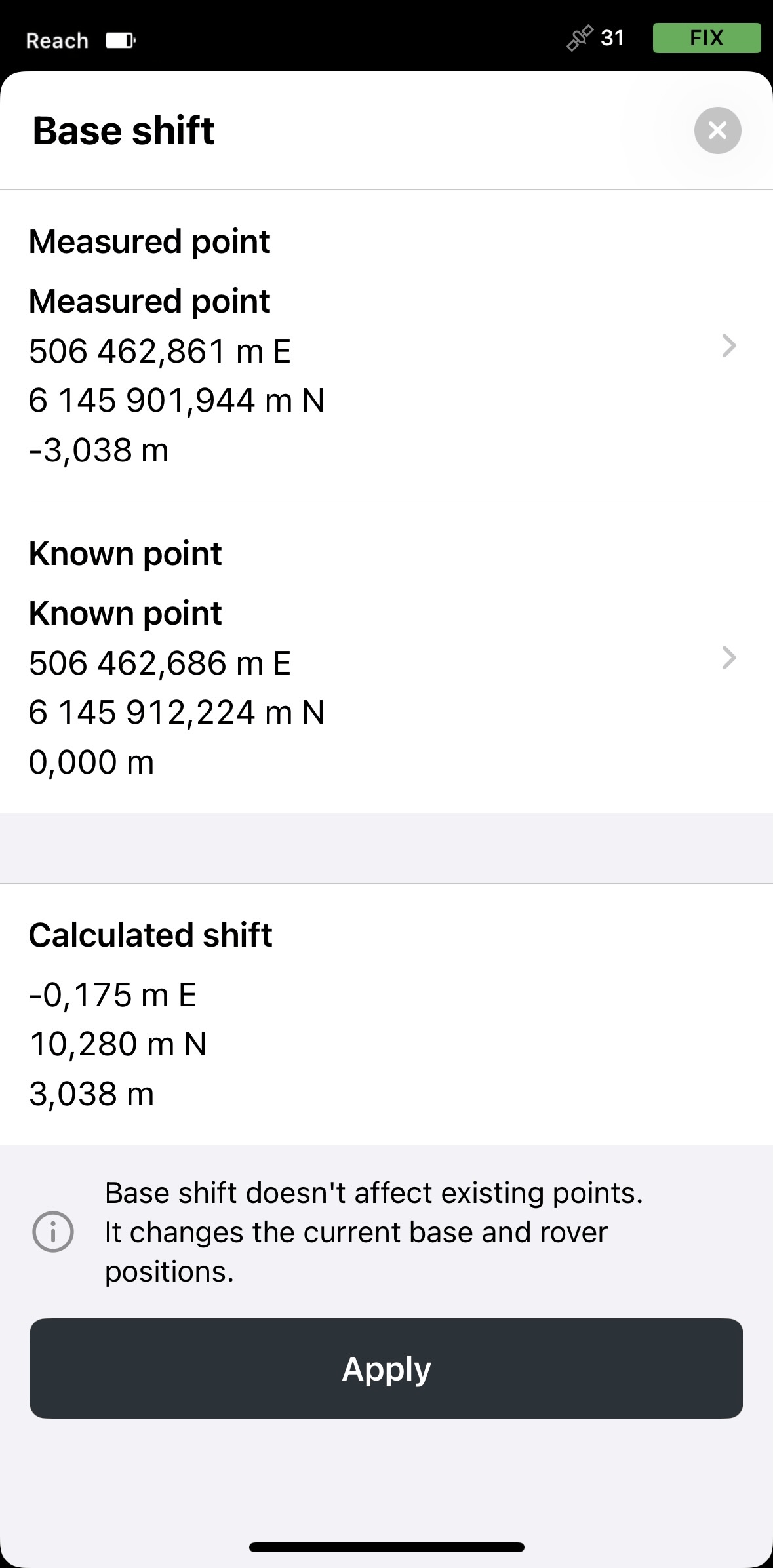
Wenn die Verschiebung angewendet wird, sehen Sie, dass sie in der Projektübersicht aktiv ist und das Rover-Symbol auf der Karte verschoben erscheint.
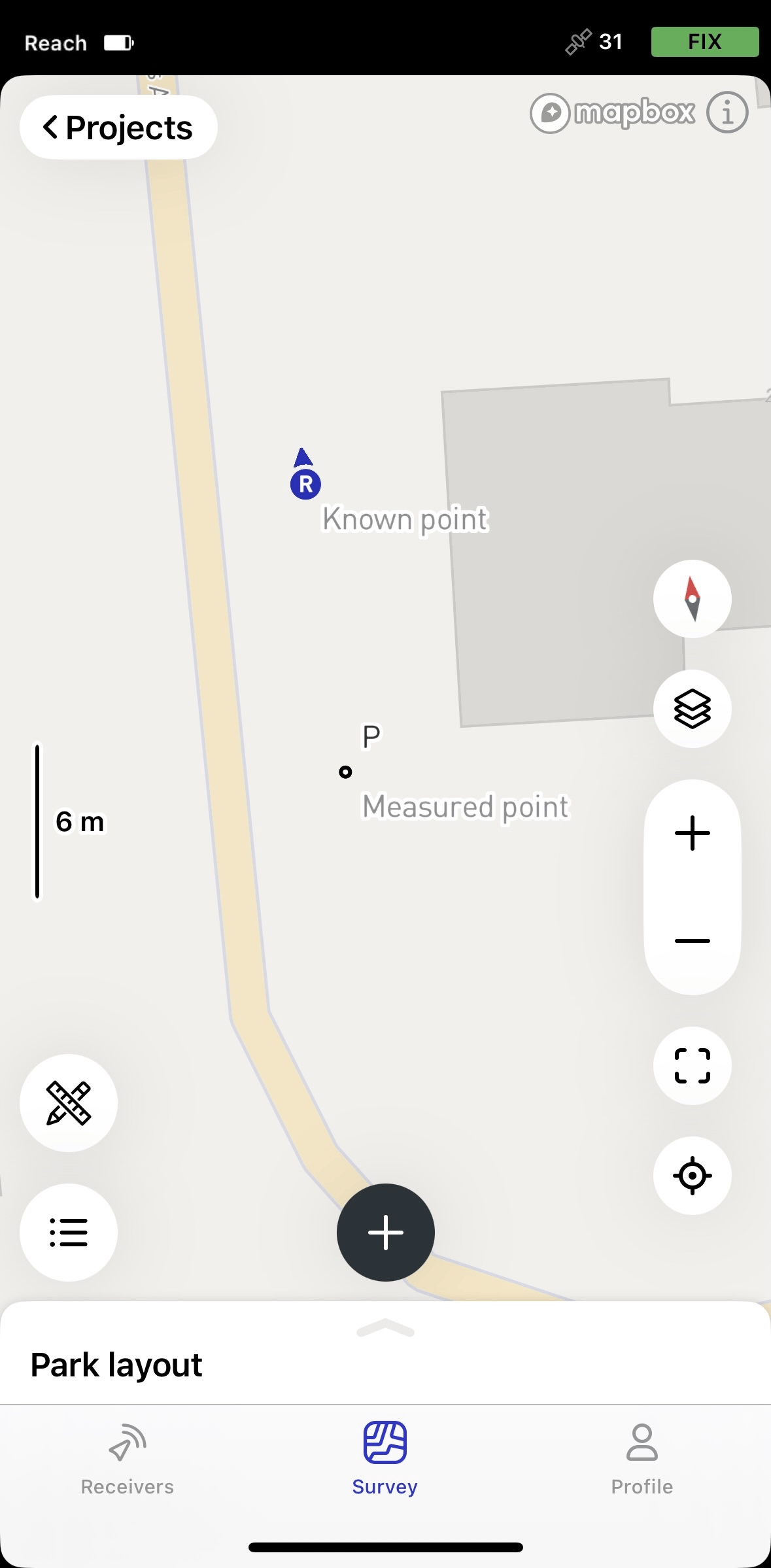
Von diesem Moment an wendet Emlid Flow die Basisverschiebung auf alle Punkte an, die Sie weiterhin erfassen. In unserem Fall bedeutet dies, dass alle Punkte, die nach der Basisverschiebung erfasst werden, genau relativ zur permanenten Vermessungsmarke positioniert werden.