Aplicar deslocamento da base
Este guia explica como aplicar o deslocamento da base no Emlid Flow para calibrar todos os dados coletados posteriormente em seu projeto de levantamento.
Visão geral
Com o recurso Deslocamento da base, o Emlid Flow ajuda a calibrar os dados do seu projeto de levantamento com base em um ponto - ele aplica um deslocamento XYZ às coordenadas ECEF da base em tempo real. O aplicativo calcula a diferença entre os pontos conhecidos e medidos e aplica um deslocamento linear a todos os outros pontos coletados em um projeto.
O deslocamento da base pode ser aplicado independentemente do
O sistema de coordenadas é um sistema local, regional ou global baseado em coordenadas, utilizado para localizar entidades geográficas. Um sistema de referência espacial define uma projeção cartográfica específica, assim como transformações entre diferentes sistemas de referência espacial.
O sistema de coordenadas é um sistema local, regional ou global baseado em coordenadas, utilizado para localizar entidades geográficas. Um sistema de referência espacial define uma projeção cartográfica específica, assim como transformações entre diferentes sistemas de referência espacial.
O recurso Deslocamento da base ajuda a calibrar os dados do levantamento quando há uma diferença entre as coordenadas de base conhecidas e as atuais. Você pode precisar disso nos seguintes casos:
- Quando não valer a pena colocar sua base sobre uma marca de levantamento permanente (PSM). Por exemplo, não é possível oferecer uma visão clara do céu nessa área, o que pode comprometer a qualidade dos registros de base.
- Quando você exceder a linha de basee precisar realocar sua base.
A linha de base é a distância entre um rover e uma base. Se a linha de base for maior do que a recomendada, a solução será menos exata, o tempo de correção será mais longo ou não será sequer calculado.
O deslocamento calculado é armazenado nos atributos de um projeto de levantamento específico, aplica-se a todos os pontos coletados posteriormente e não pode ser aplicado automaticamente a outro projeto.
Calibrar a posição de sua base em relação a um PSM
- Emlid Flow
Esse fluxo de trabalho descreve o caso em que você deseja fazer o levantamento do campo usando uma marca de levantamento permanente localizada em um local de difícil acesso. Não é conveniente instalar um tripé nessa área ou deixar a base sem supervisão. Ou é simplesmente uma visão limitada do céu que pode comprometer a qualidade dos registros de base. Aqui, o recurso Deslocamento da base é útil - você pode colocar sua base em condições adequadas nas proximidades da marca de levantamento permanente, coletar a marca de levantamento permanente com um
O Rover é um dos dois receptores GNSS que é utilizado para coletar dados em cenários RTK ou PPK. O rover é uma unidade móvel: o topógrafo utiliza o rover para registrar os pontos, enquanto o rover recebe as correções da base estática.
Nesse caso, tudo o que você precisa é de dois pontos no projeto:
- Um ponto conhecido, que é o PSM com o qual você deseja fazer a calibração.
- Um ponto medido, que é o mesmo PSM coletado com um roverno campo.
O Rover é um dos dois receptores GNSS que é utilizado para coletar dados em cenários RTK ou PPK. O rover é uma unidade móvel: o topógrafo utiliza o rover para registrar os pontos, enquanto o rover recebe as correções da base estática.
Para calcular e aplicar o deslocamento de base aos dados do seu projeto de levantamento, siga as etapas abaixo:
-
Posicione sua base e calcule a média de sua posição em
SINGLE.O status da solução define a precisão que pode ser alcançada no momento. Existem três status de solução que você poderá ver ao trabalhar com dispositivos Reach.
SINGLE significa que o rover encontrou uma solução com base no seu próprio receptor e que não serão aplicadas correções de base. A precisão em modo standalone situa-se geralmente no nível de vários metros.
FLOAT significa que o rover recebe correções da base, mas não consegue resolver todas as ambiguidades e, neste caso, a precisão geralmente fica em nível submétrico.
FIX significa que o rover, utilizando as correções da base, resolveu as ambiguidades no seu cálculo posicional e obteve a solução com uma precisão de centimetros.
tipSaiba mais sobre a colocação da base nos guias Colocação e Escolhendo um método de instalação da base.
-
Configure a comunicação RTK entre a base e o
rovere aguarde oO Rover é um dos dois receptores GNSS que é utilizado para coletar dados em cenários RTK ou PPK. O rover é uma unidade móvel: o topógrafo utiliza o rover para registrar os pontos, enquanto o rover recebe as correções da base estática.
FIX.O status da solução define a precisão que pode ser alcançada no momento. Existem três status de solução que você poderá ver ao trabalhar com dispositivos Reach.
SINGLE significa que o rover encontrou uma solução com base no seu próprio receptor e que não serão aplicadas correções de base. A precisão em modo standalone situa-se geralmente no nível de vários metros.
FLOAT significa que o rover recebe correções da base, mas não consegue resolver todas as ambiguidades e, neste caso, a precisão geralmente fica em nível submétrico.
FIX significa que o rover, utilizando as correções da base, resolveu as ambiguidades no seu cálculo posicional e obteve a solução com uma precisão de centimetros.
tipPara saber mais, consulte os guias a seguir:
-
Crie um projeto de levantamento no Emlid Flow.
-
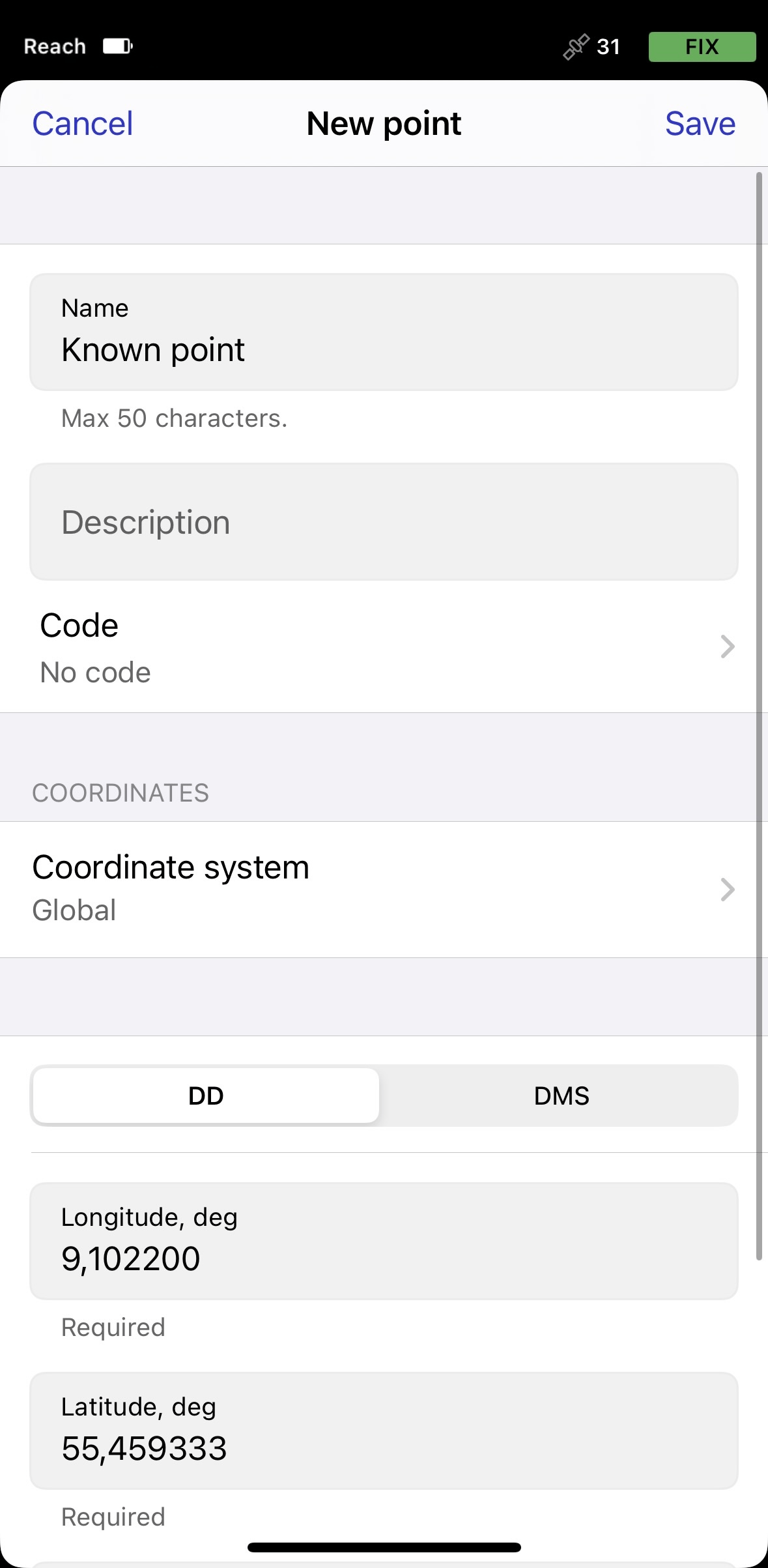
Adicione manualmente um ponto com as coordenadas de seu PSM e salve-o. Esse será um ponto conhecido.
noteVocê também pode fazer isso mais tarde na tela Deslocamento da base, toque em Adicionar ponto e preencha as coordenadas do seu PSM.
-
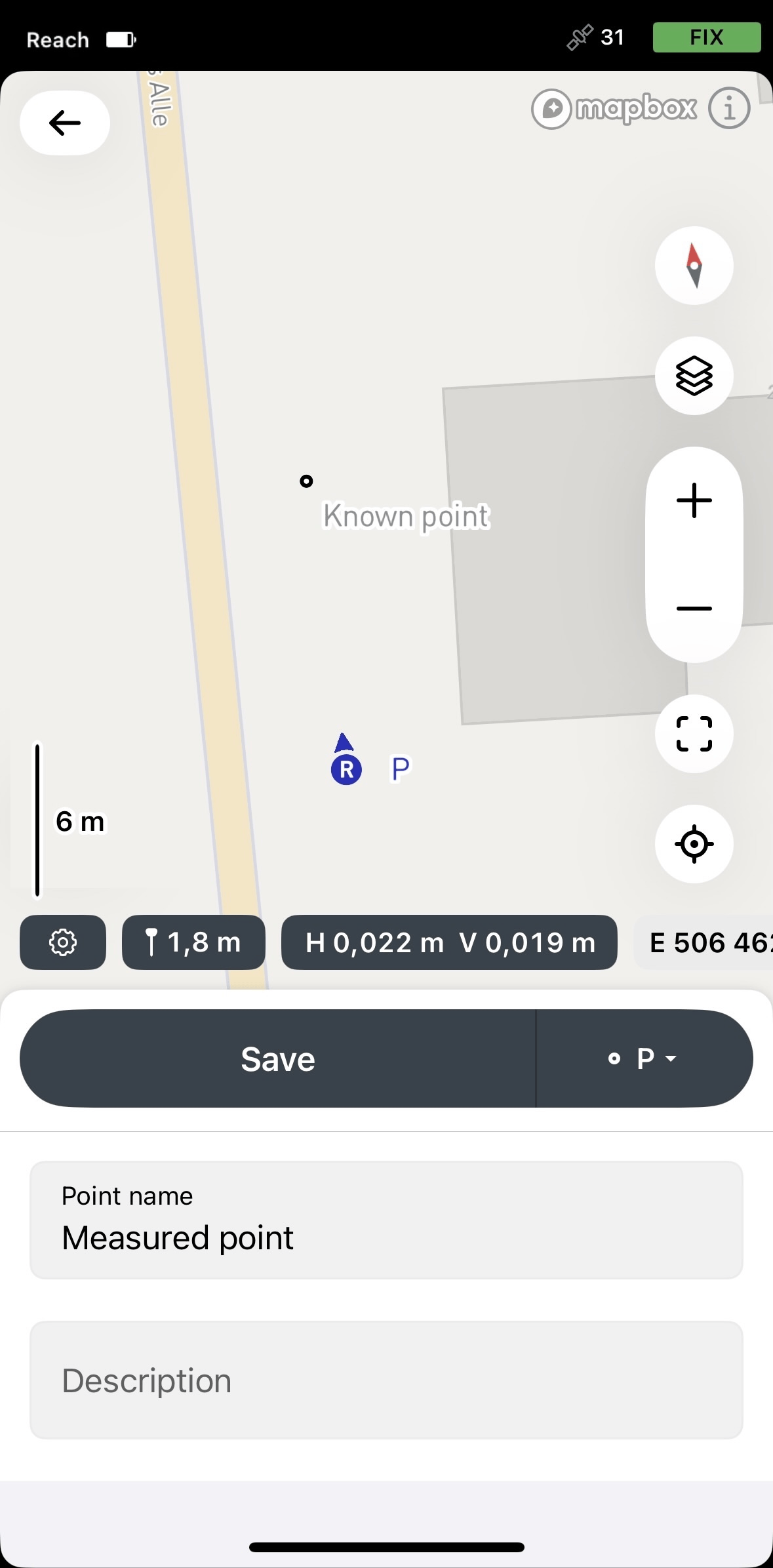
Coloque o
roversobre o PSM e colete-o. Esse será um ponto medido.O Rover é um dos dois receptores GNSS que é utilizado para coletar dados em cenários RTK ou PPK. O rover é uma unidade móvel: o topógrafo utiliza o rover para registrar os pontos, enquanto o rover recebe as correções da base estática.
-
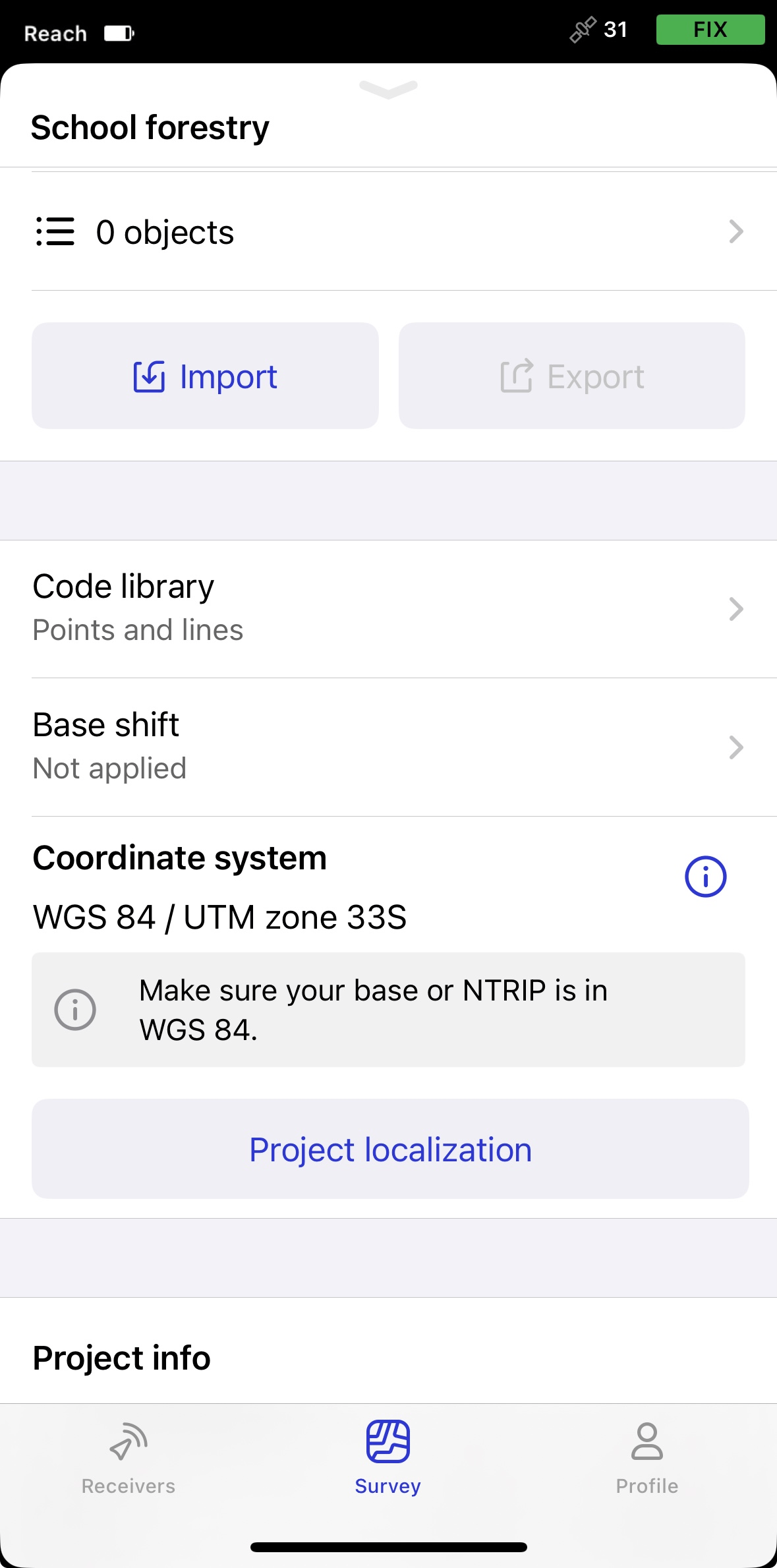
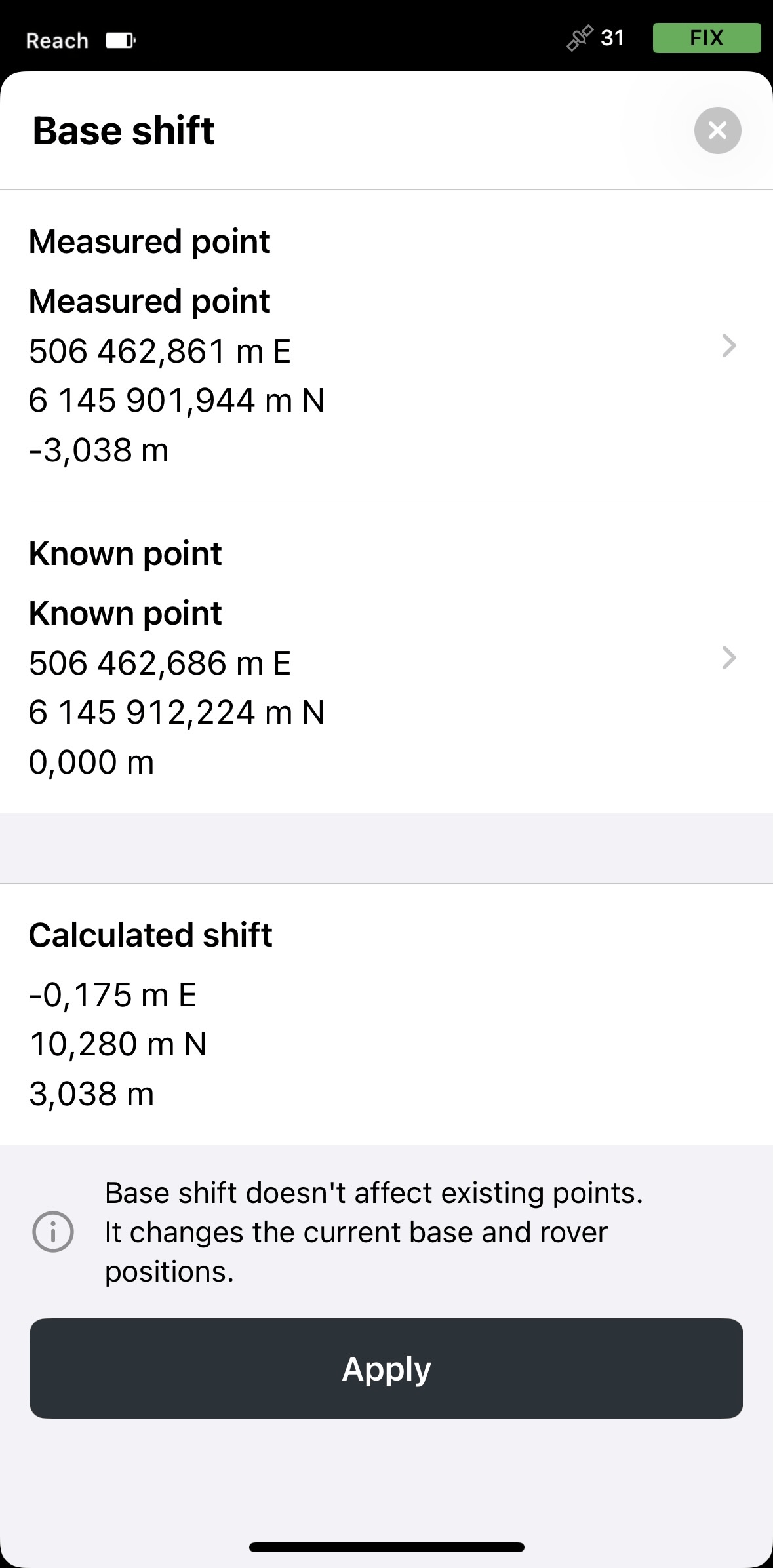
Deslize para cima a gaveta de projetos e toque em Deslocamento da base.
-
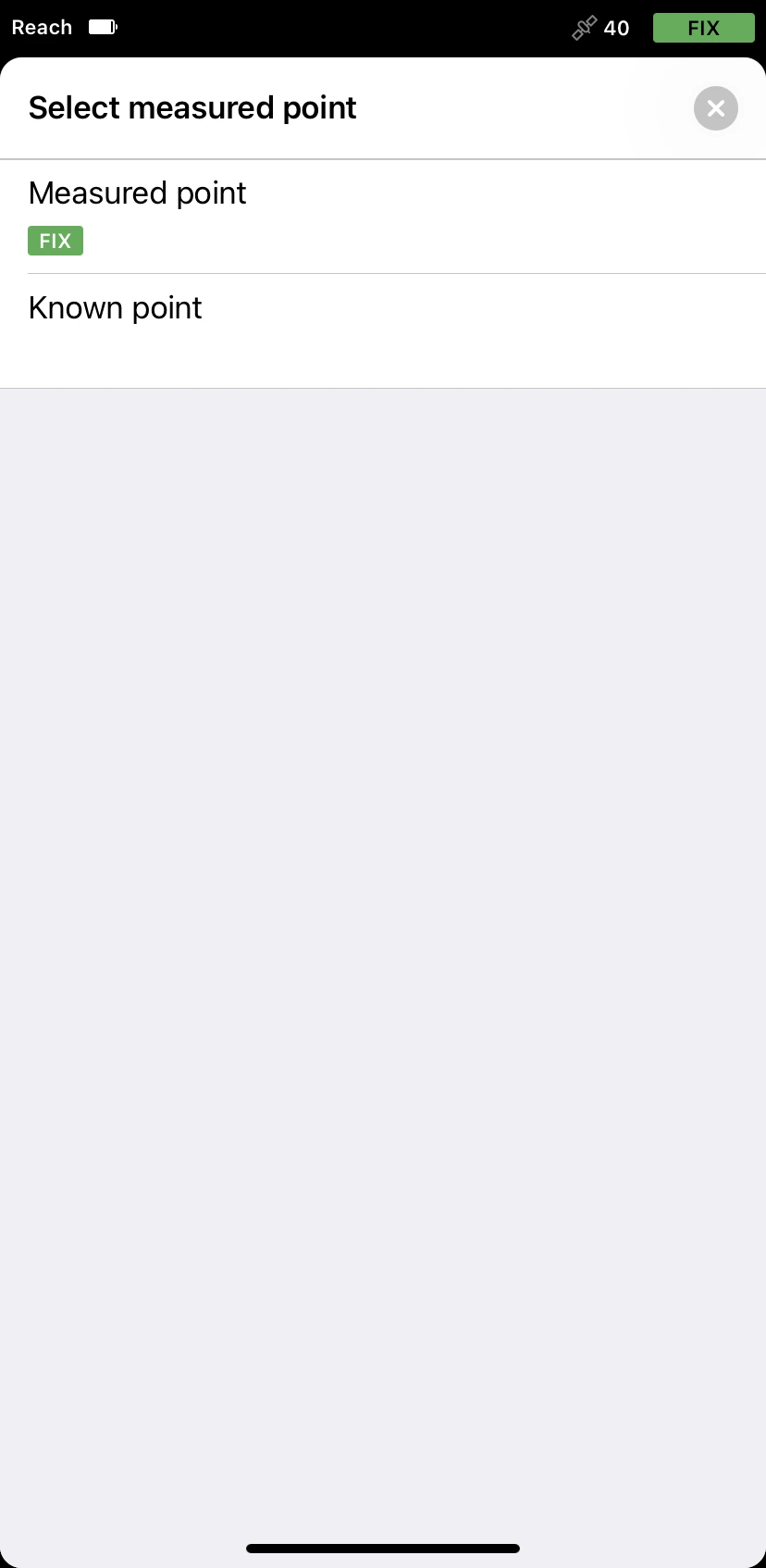
Toque em Ponto medido.
-
Selecione o ponto que você coletou. Nós o chamamos de "Ponto medido".
-
Toque em Ponto conhecido.
-
Selecione o ponto com as coordenadas PSM. Nós o chamamos de "Ponto conhecido". Depois disso, o aplicativo calculará o deslocamento.
Se você não adicionou um ponto conhecido antecipadamente, toque em Adicionar ponto e preencha as coordenadas do seu PSM.
- Toque no botão Aplicar para ativar o deslocamento.
Quando o deslocamento for aplicado, você verá que ele está ativo na visão geral do projeto e o ícone do rover no mapa aparecerá deslocado.
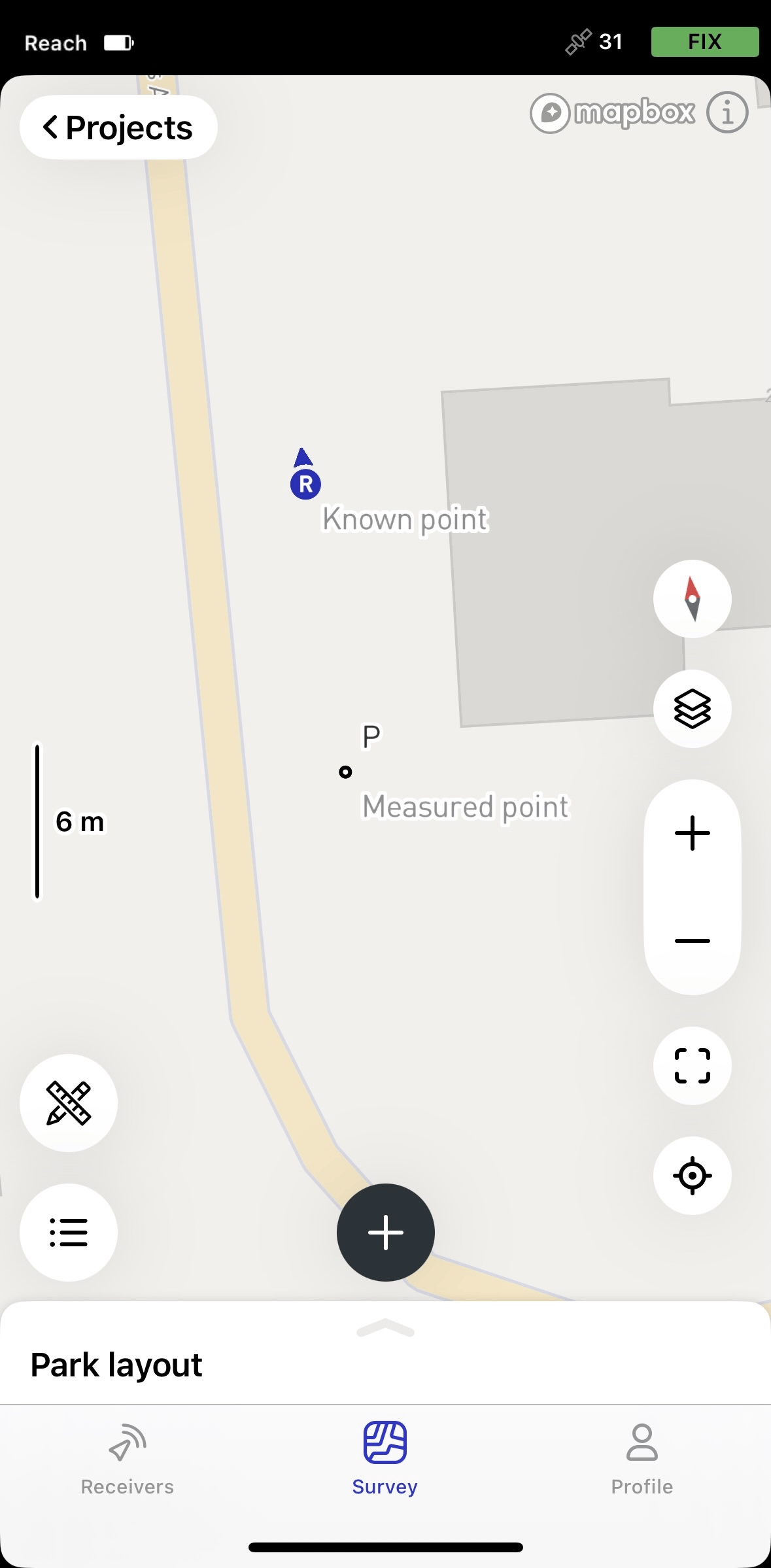
A partir desse momento, o Emlid Flow começa a aplicar o deslocamento de base a todos os pontos que você acumular. No nosso caso, isso significa que todos os pontos coletados após o deslocamento da base serão posicionados exatamente em relação à marca de levantamento permanente.