Appliquer le décalage de base
Ce guide explique comment appliquer le décalage de base dans Emlid Flow pour calibrer toutes les données collectées ultérieurement dans votre projet de levé.
Vue d'ensemble
Avec la fonction de décalage de base, Emlid Flow vous aide à calibrer les données de votre projet de levé en fonction d'un point : il applique un décalage XYZ aux coordonnées ECEF de la base en temps réel. L'application calcule la différence entre les points connus et mesurés et applique un décalage linéaire à tous les points collectés ultérieurement dans un même projet.
Le décalage de base peut être appliqué indépendamment du
Coordinate system is a coordinate-based local, regional or global system used to locate geographical entities. A spatial reference system defines a specific map projection, as well as transformations between different spatial reference systems.
Coordinate system is a coordinate-based local, regional or global system used to locate geographical entities. A spatial reference system defines a specific map projection, as well as transformations between different spatial reference systems.
La fonction de décalage de base vous aide à calibrer les données de levé lorsqu'il y a une différence entre les coordonnées de base connues et actuelles. Vous pourriez en avoir besoin dans les cas suivants :
- Lorsqu'il est peu pratique de placer votre base sur une marque de levé permanente (PSM). Par exemple, vous ne pouvez pas fournir une vue dégagée du ciel dans cette zone, ce qui peut compromettre la qualité des journaux de base.
- Lorsque vous dépassez la ligne de baseet que vous devez repositionner votre base.
Baseline is the distance between a rover and a base. If the baseline is bigger than recommended, the solution will be less accurate, the fix time will be longer or it won't be calculated at all.
Le décalage calculé est stocké dans les attributs d'un projet de levé particulier, s'applique à tous les points collectés ultérieurement et ne peut pas être appliqué automatiquement à un autre projet.
Calibrez la position de votre base par rapport à une PSM
- Emlid Flow
Ce flux de travail décrit le cas où vous souhaitez lever le champ en utilisant une marque de levé permanente située dans un endroit difficile d'accès. Il n'est pas pratique d'installer un trépied dans cette zone ou de laisser la base sans surveillance. Ou il s'agit simplement d'une vue limitée du ciel qui peut compromettre la qualité des journaux de base. Ici, la fonction décalage de base est utile : vous pouvez placer votre base dans des conditions appropriées à proximité de la marque de levé permanente, collecter la marque de levé permanente avec un
Rover is one of the two GNSS receivers that is used for collecting data in RTK or PPK scenarios. Rover is a moving unit: the surveyor uses rover to record the points, while rover receives the corrections from the static base.
Dans ce cas, vous n'avez besoin que de deux points dans le projet :
- Un point connu, qui est la PSM que vous souhaitez calibrer.
- Un point mesuré, qui est la même marque de levé permanente collectée avec un roversur le terrain.
Rover is one of the two GNSS receivers that is used for collecting data in RTK or PPK scenarios. Rover is a moving unit: the surveyor uses rover to record the points, while rover receives the corrections from the static base.
Pour calculer et appliquer le décalage de base à vos données de projet de levé, suivez les étapes ci-dessous :
-
Placez votre base et faites la moyenne de sa position en
SINGLE.Solution status defines the precision that can be achieved at the moment. There are three solution statuses you can see when working with Reach devices.
SINGLE means that the rover has found a solution relying on its own receiver and base corrections are not applied. Precision in standalone mode is usually at the several-meter level.
FLOAT means that the rover receives corrections from the base but cannot resolve all ambiguities, and in this case, the precision is usually at the submeter-level.
FIX means that the rover using corrections from the base resolved the ambiguities in its positional calculation and achieved the solution with the centimeter-level precision.
astuceApprenez-en plus sur le placement de la base dans les guides Placement et Choix de la méthode de configuration de la base.
-
Configurez la communication RTK entre la base et le
roveret attendez leRover is one of the two GNSS receivers that is used for collecting data in RTK or PPK scenarios. Rover is a moving unit: the surveyor uses rover to record the points, while rover receives the corrections from the static base.
FIX.Solution status defines the precision that can be achieved at the moment. There are three solution statuses you can see when working with Reach devices.
SINGLE means that the rover has found a solution relying on its own receiver and base corrections are not applied. Precision in standalone mode is usually at the several-meter level.
FLOAT means that the rover receives corrections from the base but cannot resolve all ambiguities, and in this case, the precision is usually at the submeter-level.
FIX means that the rover using corrections from the base resolved the ambiguities in its positional calculation and achieved the solution with the centimeter-level precision.
astucePour en savoir plus, consultez les guides suivants :
-
Créez un projet de levé dans Emlid Flow.
-
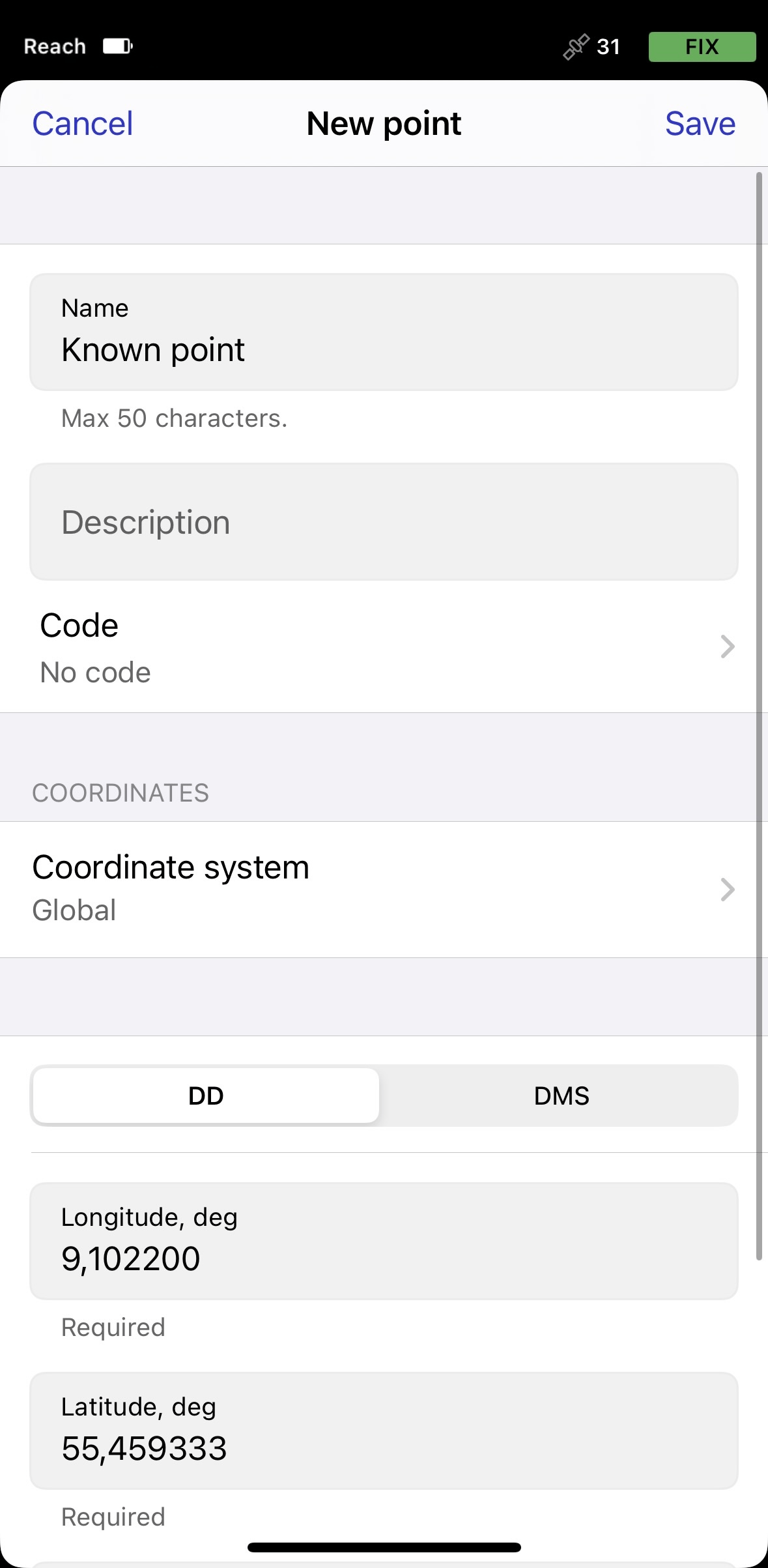
Ajoutez manuellement un point avec les coordonnées de votre PSM et enregistrez-le. Ce sera un point connu.
remarqueVous pouvez également le faire plus tard sur l'écran Décalage de la base, appuyez sur Add a point (Ajouter un point) et remplissez les coordonnées de votre PSM.
-
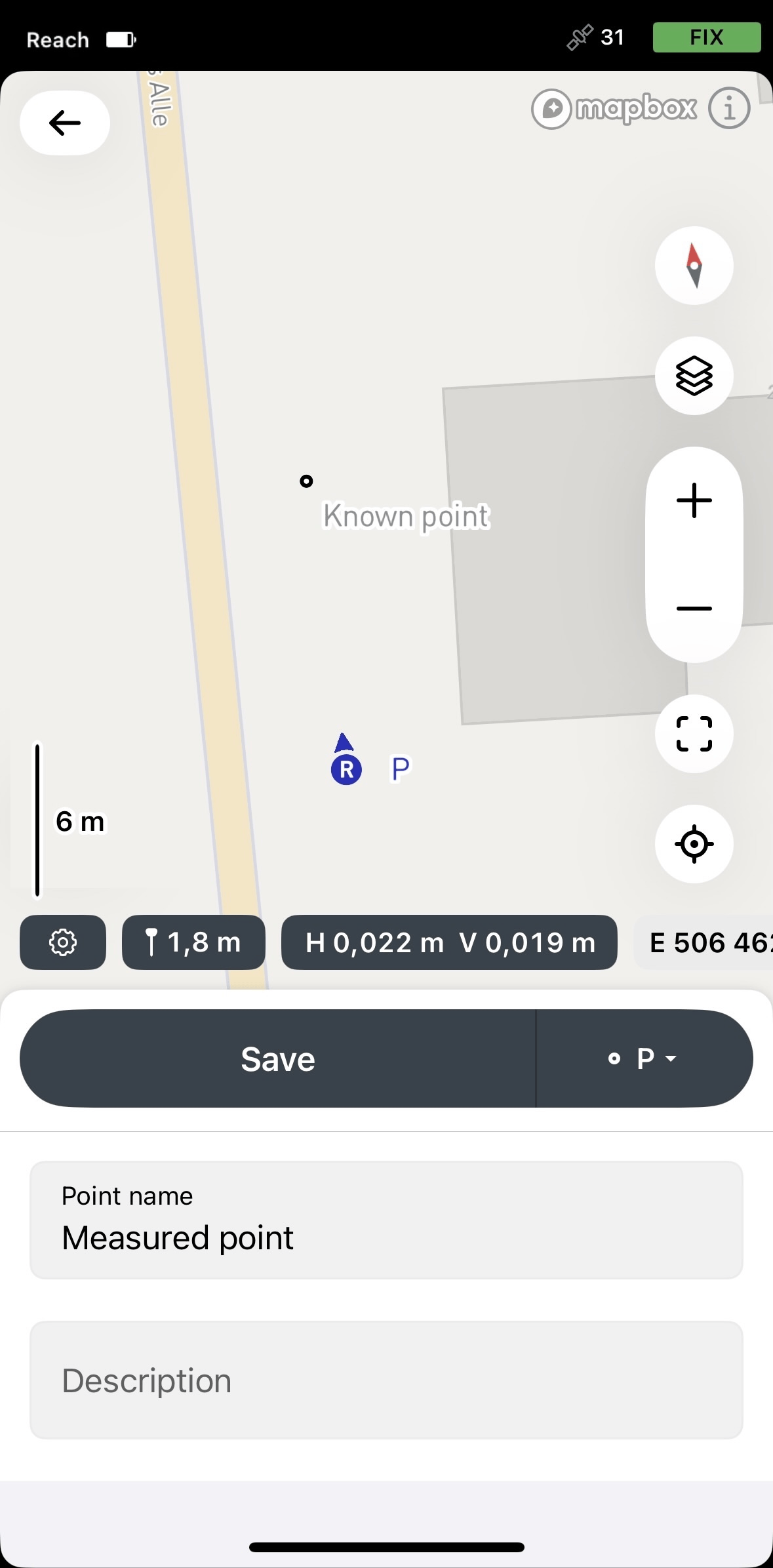
Placez le
roversur la PSM et collectez-la. Ce sera un point mesuré.Rover is one of the two GNSS receivers that is used for collecting data in RTK or PPK scenarios. Rover is a moving unit: the surveyor uses rover to record the points, while rover receives the corrections from the static base.
-
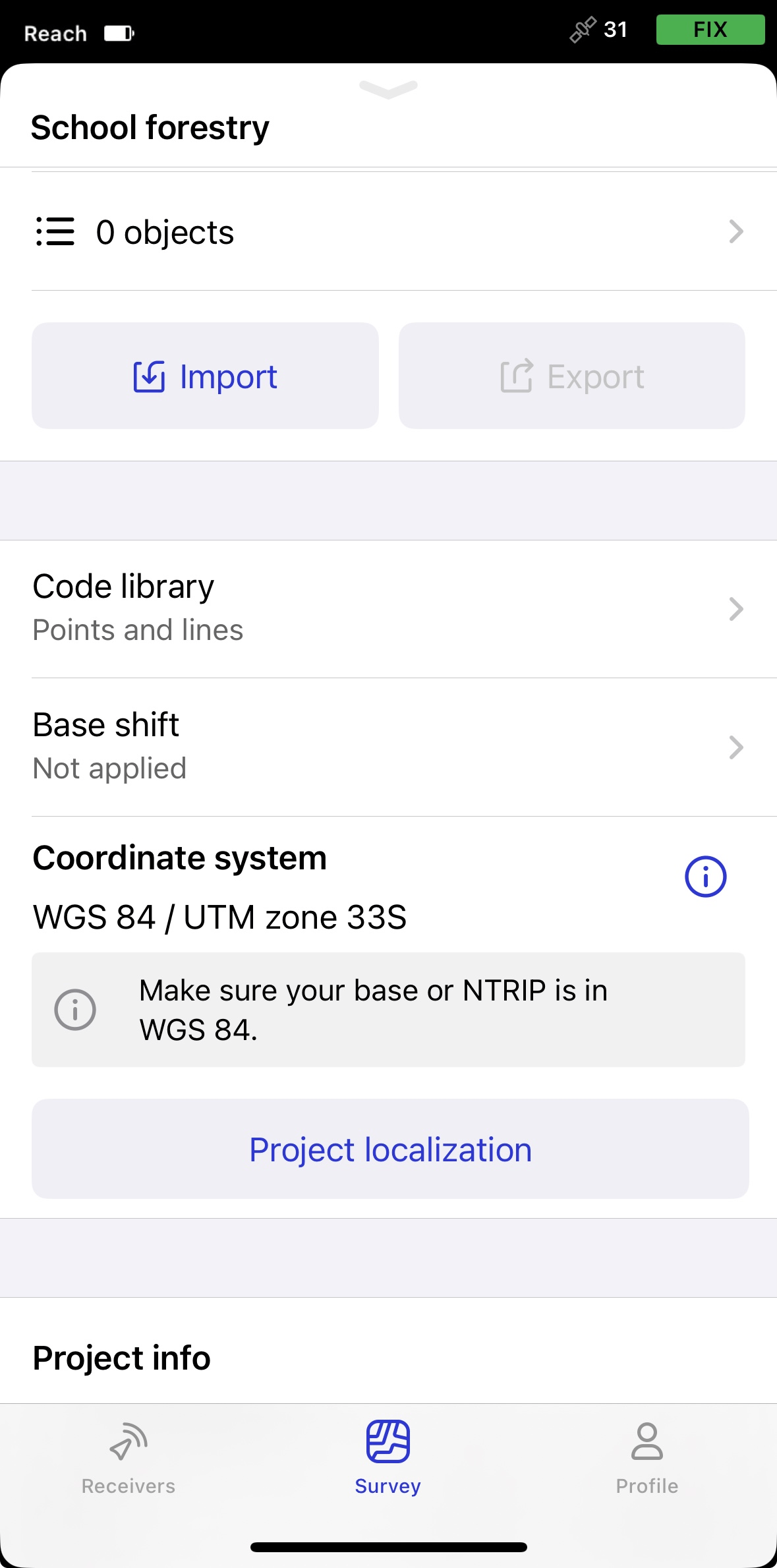
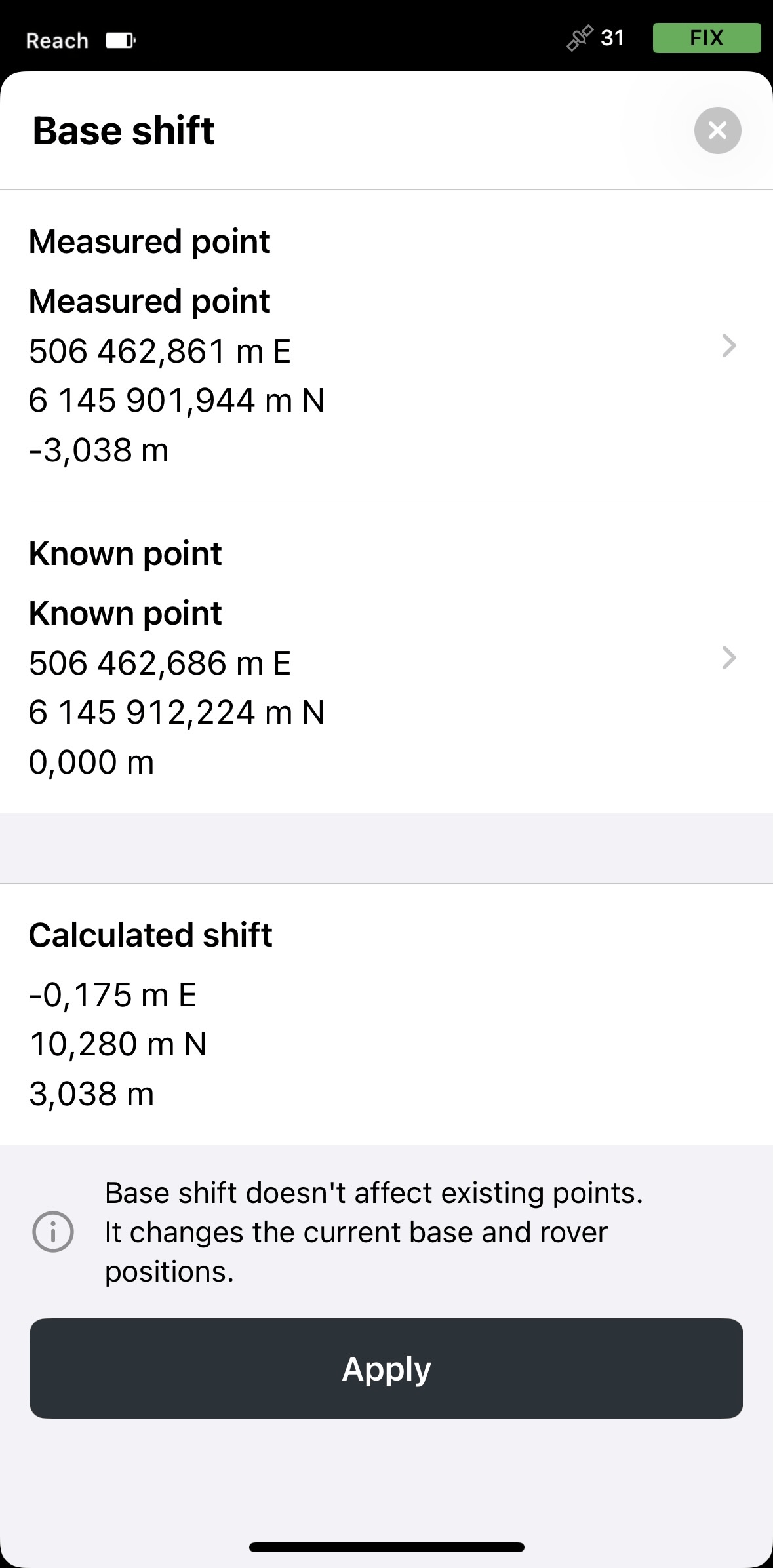
Faites glisser le tiroir du projet vers le haut et appuyez sur Base shift (Décalage de la base).
-
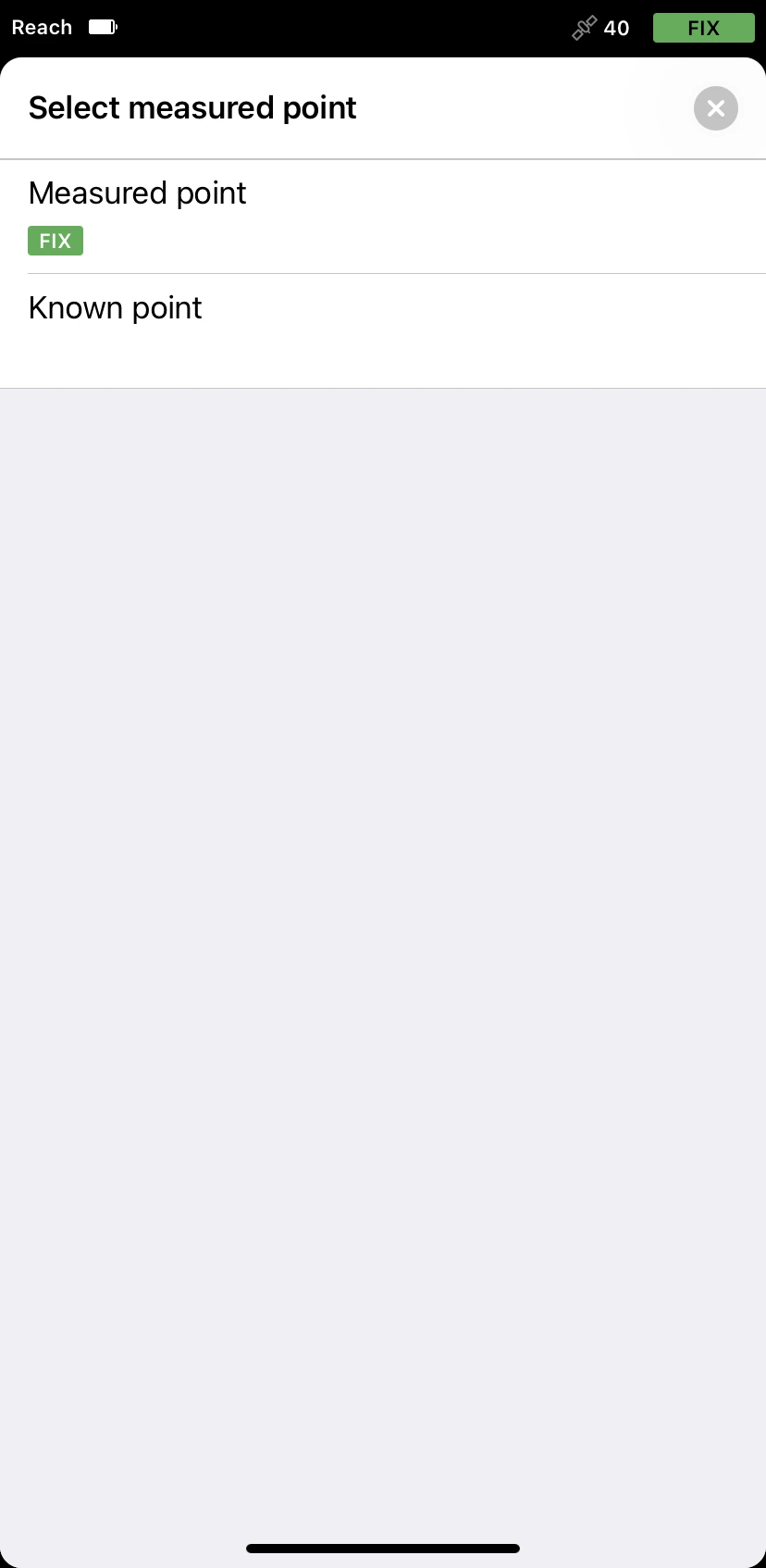
Appuyez sur Measured point (Point mesuré).
-
Sélectionnez le point que vous avez collecté. Nous l'avons appelé « Point mesuré ».
-
Appuyez sur Known point (Point connu).
-
Sélectionnez le point avec les coordonnées du PSM. Nous l'avons appelé « Point connu ». Après cela, l'application calculera le décalage.
Si vous n'avez pas ajouté de point connu à l'avance, appuyez sur Add a point (Ajouter un point) et remplissez les coordonnées de votre PSM.
- Appuyez sur le bouton Apply (Appliquer) pour activer le décalage.
Lorsque le décalage est appliqué, vous verrez qu'il est actif dans l'aperçu du projet, et l'icône du rover sur la carte apparaît décalée.
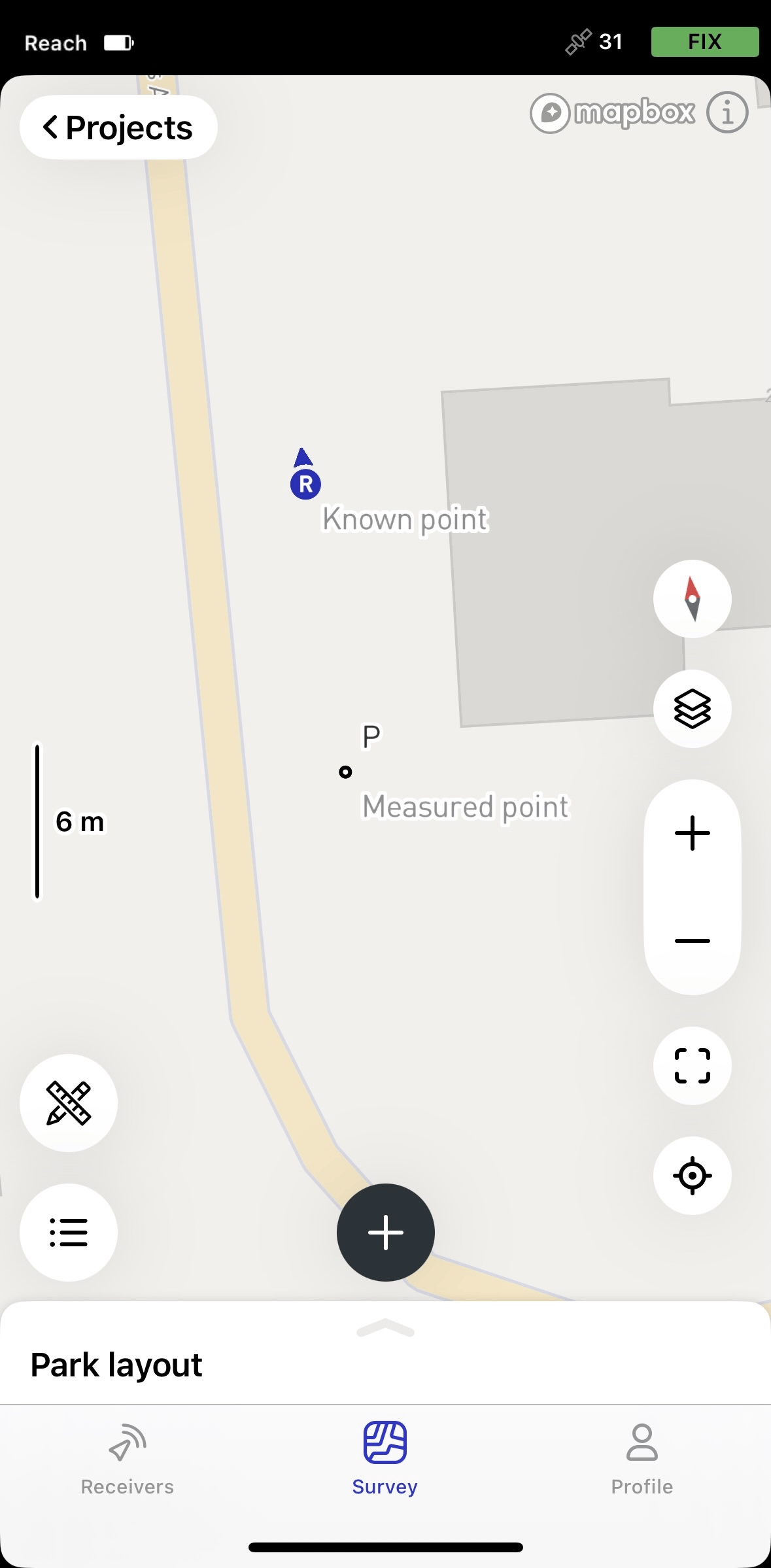
À partir de ce moment, Emlid Flow commence à appliquer le décalage de base à tous les points que vous collectez ensuite. Dans notre cas, cela signifie que tous les points collectés après le décalage de base seront positionnés exactement par rapport à la marque de levé permanente.