Introducción a los sistemas de coordenadas
Resumen
Para definir la ubicación precisa de los objetos topográficos en el mundo, es necesario configurar un
El sistema de coordenadas es un sistema local, regional o global basado en coordenadas que se utiliza para localizar entidades geográficas. Un sistema de referencia espacial define una proyección cartográfica específica, así como las transformaciones entre diferentes sistemas de referencia espacial.
A la hora de elegir un
El sistema de coordenadas es un sistema local, regional o global basado en coordenadas que se utiliza para localizar entidades geográficas. Un sistema de referencia espacial define una proyección cartográfica específica, así como las transformaciones entre diferentes sistemas de referencia espacial.
El sistema de coordenadas es un sistema local, regional o global basado en coordenadas que se utiliza para localizar entidades geográficas. Un sistema de referencia espacial define una proyección cartográfica específica, así como las transformaciones entre diferentes sistemas de referencia espacial.
El rover es uno de los dos receptores GNSS que se utiliza para la recolección de datos en escenarios RTK o PPK. El rover es una unidad móvil: el topógrafo utiliza el rover para registrar los puntos, mientras que el rover recibe las correcciones de la base estática.
Un desajuste en la configuración del SC entre su
El rover es uno de los dos receptores GNSS que se utiliza para la recolección de datos en escenarios RTK o PPK. El rover es una unidad móvil: el topógrafo utiliza el rover para registrar los puntos, mientras que el rover recibe las correcciones de la base estática.
La base es uno de los receptores que actúan como estación de referencia en escenarios RTK o PPK. Es una unidad estática con las coordenadas determinadas que envía correcciones a la unidad móvil o rover. Si la base se fija sobre el punto conocido, proporciona una exactitud absoluta.
Configurar
Puede configurar el SC para su proyecto de varias maneras.
Elija en la biblioteca
Emlid Flow y Emlid Flow 360 contienen el registro verificado de SC locales para países específicos. Cada
El sistema de coordenadas es un sistema local, regional o global basado en coordenadas que se utiliza para localizar entidades geográficas. Un sistema de referencia espacial define una proyección cartográfica específica, así como las transformaciones entre diferentes sistemas de referencia espacial.
El rover es uno de los dos receptores GNSS que se utiliza para la recolección de datos en escenarios RTK o PPK. El rover es una unidad móvil: el topógrafo utiliza el rover para registrar los puntos, mientras que el rover recibe las correcciones de la base estática.
La Red de transporte de RTCM a través de protocolo de Internet o NTRIP es una fuente alternativa de correcciones. NTRIP permite que tu rover reciba correcciones a través de Internet sin necesidad de que el segundo receptor local actúe como base. Una estación de referencia recoge los datos y los envía al NTRIP caster, donde se retransmiten a través del puerto de Internet al rover cliente conectado a través de un puerto determinado y autorizado.
En este caso, las aplicaciones aplican
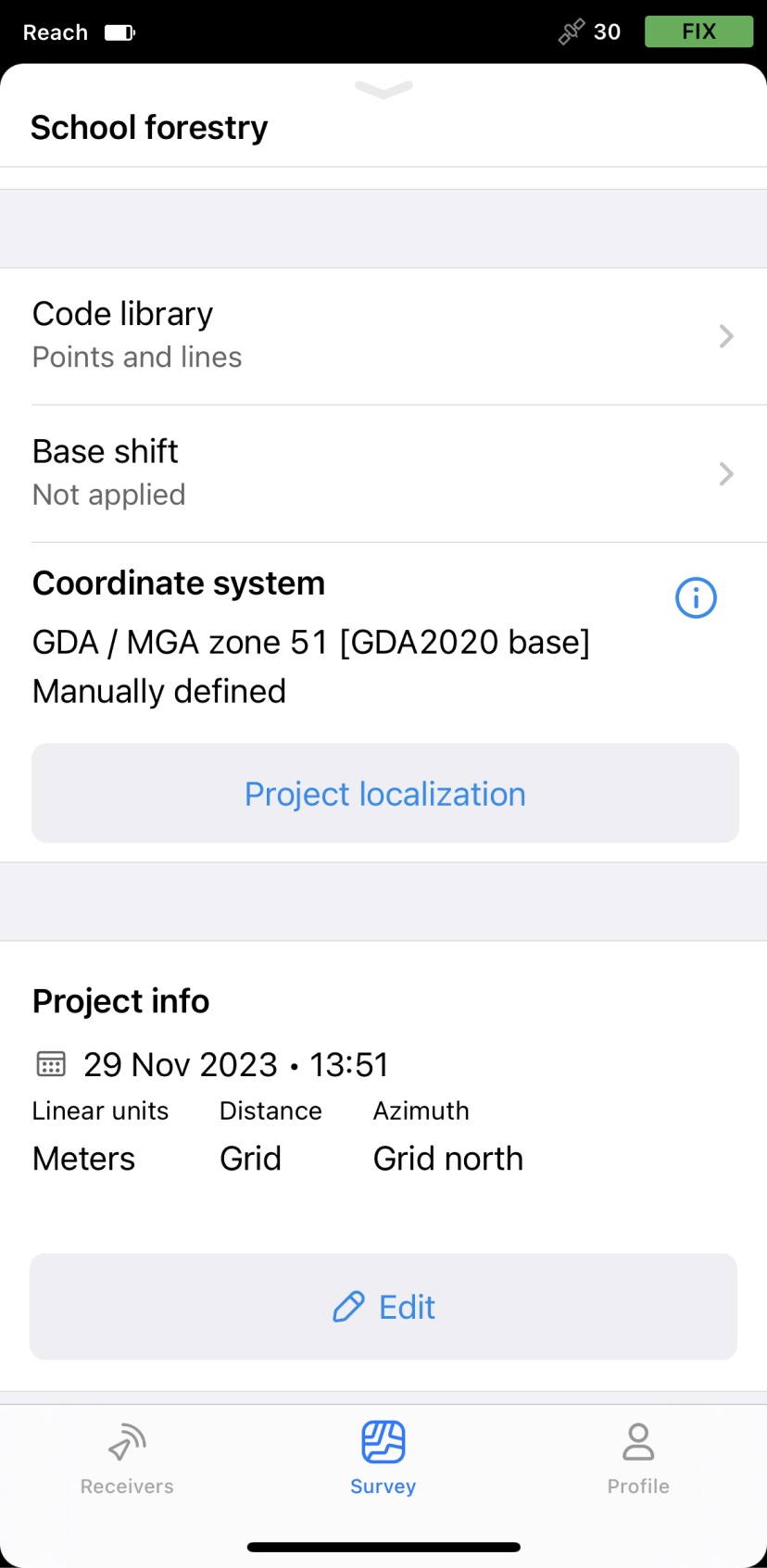
La distancia de cuadrícula es la distancia medida en el plano de proyección.
El acimut norte de cuadrícula es el ángulo medido en el sentido de las agujas del reloj entre una línea paralela al meridiano central y la dirección hacia un punto de interés (una línea recta entre dos puntos del plano de proyección).
A continuación, se muestra un ejemplo de
El sistema de coordenadas es un sistema local, regional o global basado en coordenadas que se utiliza para localizar entidades geográficas. Un sistema de referencia espacial define una proyección cartográfica específica, así como las transformaciones entre diferentes sistemas de referencia espacial.
El rover es uno de los dos receptores GNSS que se utiliza para la recolección de datos en escenarios RTK o PPK. El rover es una unidad móvil: el topógrafo utiliza el rover para registrar los puntos, mientras que el rover recibe las correcciones de la base estática.
La Red de transporte de RTCM a través de protocolo de Internet o NTRIP es una fuente alternativa de correcciones. NTRIP permite que tu rover reciba correcciones a través de Internet sin necesidad de que el segundo receptor local actúe como base. Una estación de referencia recoge los datos y los envía al NTRIP caster, donde se retransmiten a través del puerto de Internet al rover cliente conectado a través de un puerto determinado y autorizado.
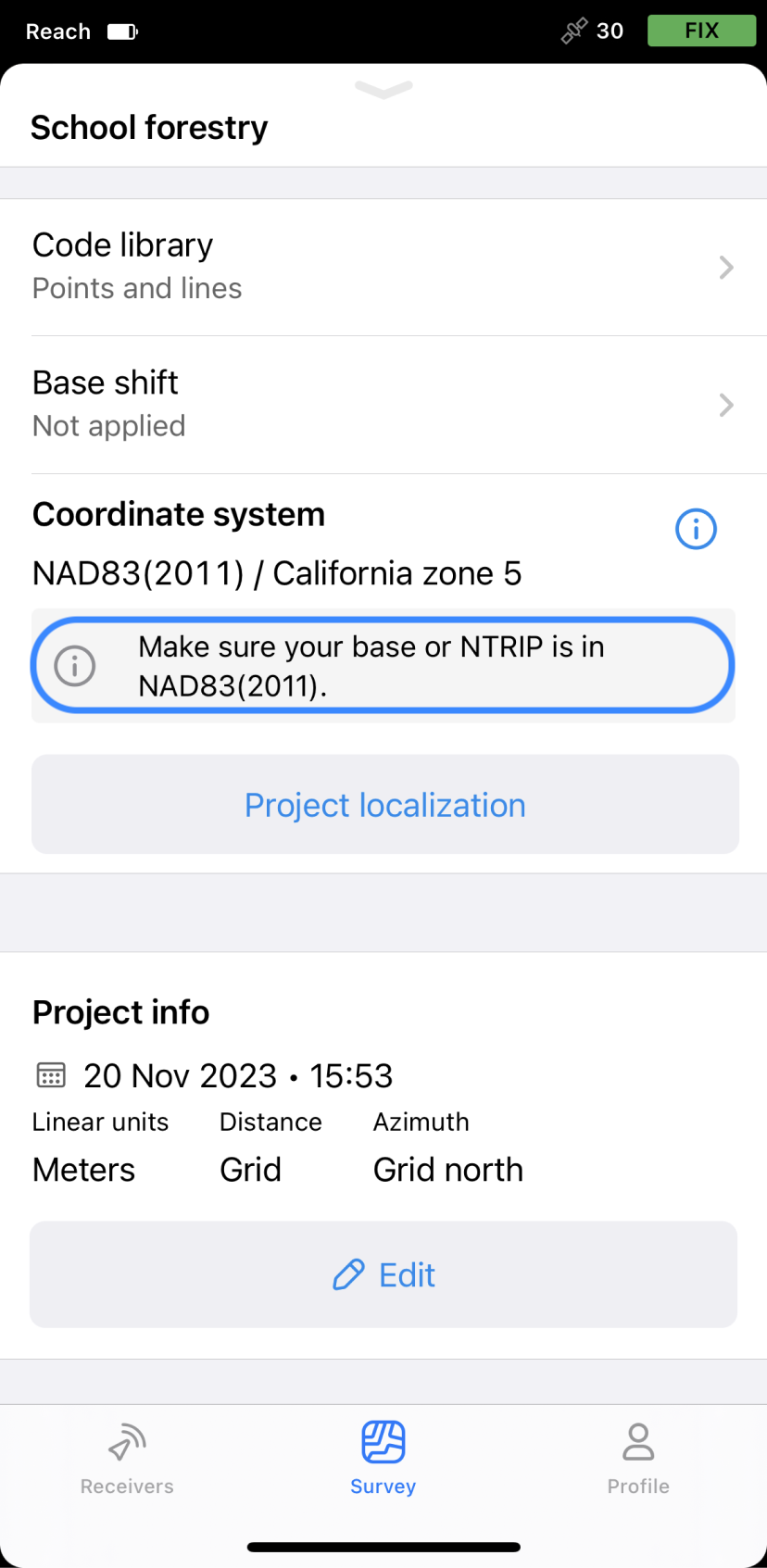
California zone 5-a projection.
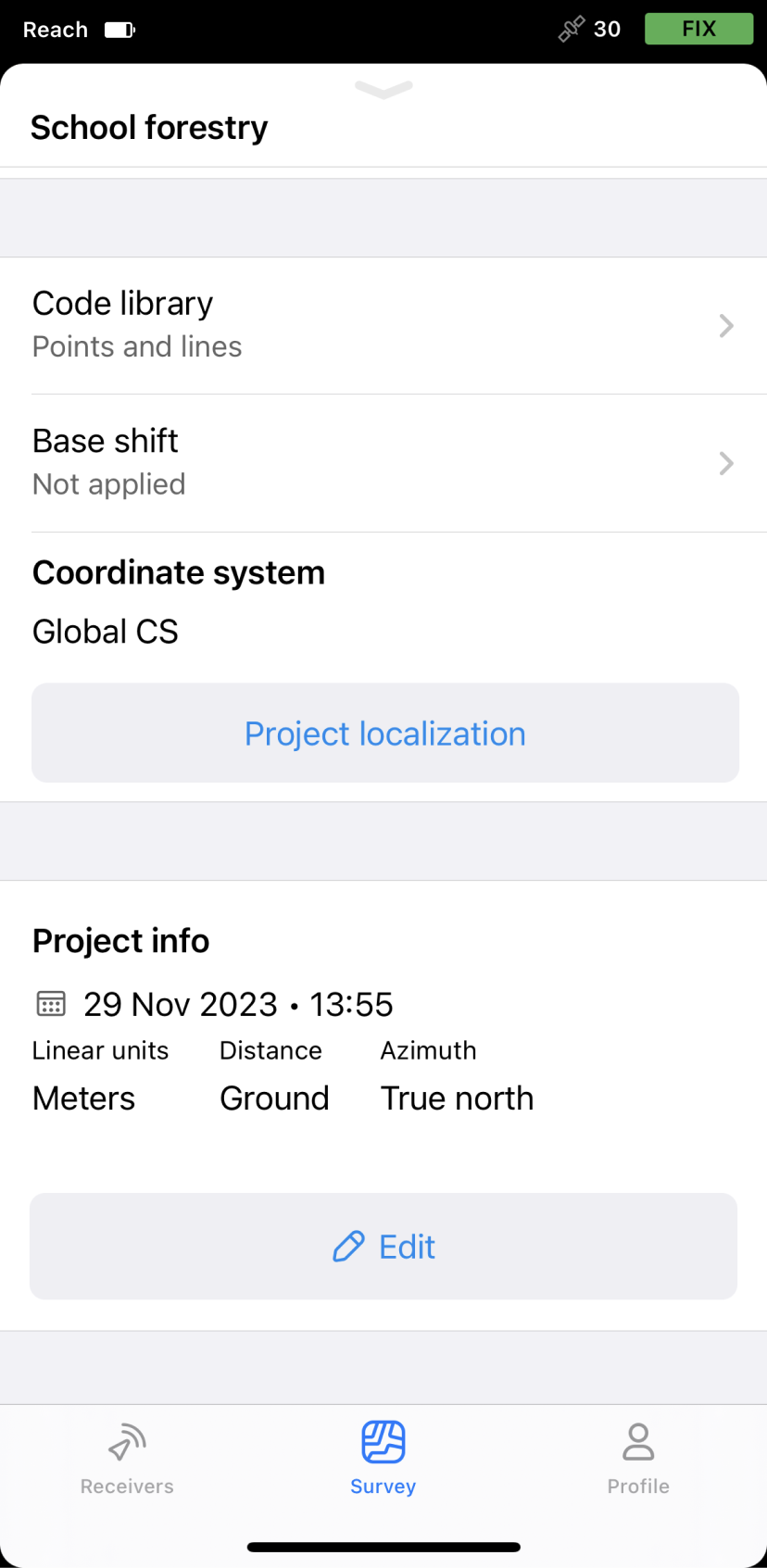
Aplicar SC global
Esta opción se aplica al empezar a utilizar la aplicación Emlid Flow y llevar a cabo pruebas rápidas sobre el terreno. Como resultado, obtendrá coordenadas geográficas (latitud, longitud y altura del elipsoide) en los datos de su base.
En este caso, las aplicaciones aplican
La distancia al suelo es la distancia medida sobre la superficie real de la Tierra, teniendo en cuenta la elevación media de los puntos medidos.
El acimut norte real es el ángulo comprendido entre 0 y 360 grados medido en el sentido de las agujas del reloj entre el norte real y la dirección hacia un punto de interés.
A continuación, se muestra un ejemplo de uso de la opción SC global en Emlid Flow & Emlid Flow 360. Si introduce las coordenadas base en NAD83(2011) en la configuración de la base, obtendrá las coordenadas de NAD83(2011) con el
El rover es uno de los dos receptores GNSS que se utiliza para la recolección de datos en escenarios RTK o PPK. El rover es una unidad móvil: el topógrafo utiliza el rover para registrar los puntos, mientras que el rover recibe las correcciones de la base estática.
Utilizar SC personalizados
Si conoce los parámetros de proyección y el sistema de coordenadas local necesario no es compatible con Emlid Flow y Emlid Flow 360, puede añadir su propio SC introduciendo los siguientes parámetros:
Dado que no todos los grupos de parámetros son necesarios para la configuración de un
El sistema de coordenadas es un sistema local, regional o global basado en coordenadas que se utiliza para localizar entidades geográficas. Un sistema de referencia espacial define una proyección cartográfica específica, así como las transformaciones entre diferentes sistemas de referencia espacial.
- Elipsoide en el que se basan sus datos
- Tipo de proyección y sus parámetros
- Tipo de transformación y sus parámetros
- Modelo geoide
En este caso, las aplicaciones aplican
La distancia de cuadrícula es la distancia medida en el plano de proyección.
El acimut norte de cuadrícula es el ángulo medido en el sentido de las agujas del reloj entre una línea paralela al meridiano central y la dirección hacia un punto de interés (una línea recta entre dos puntos del plano de proyección).
A continuación, se muestra un ejemplo de un SC personalizado configurado en Emlid Flow.