Introduction aux systèmes de coordonnées
Vue d'ensemble
Pour définir l'emplacement précis des objets arpentés dans le monde, vous devez configurer un
Coordinate system is a coordinate-based local, regional or global system used to locate geographical entities. A spatial reference system defines a specific map projection, as well as transformations between different spatial reference systems.
Lors du choix d'un
Coordinate system is a coordinate-based local, regional or global system used to locate geographical entities. A spatial reference system defines a specific map projection, as well as transformations between different spatial reference systems.
Coordinate system is a coordinate-based local, regional or global system used to locate geographical entities. A spatial reference system defines a specific map projection, as well as transformations between different spatial reference systems.
Rover is one of the two GNSS receivers that is used for collecting data in RTK or PPK scenarios. Rover is a moving unit: the surveyor uses rover to record the points, while rover receives the corrections from the static base.
Une incompatibilité dans la configuration du SC entre votre
Rover is one of the two GNSS receivers that is used for collecting data in RTK or PPK scenarios. Rover is a moving unit: the surveyor uses rover to record the points, while rover receives the corrections from the static base.
Base is one of the receivers that act as a reference station in RTK or PPK scenarios. It is a static unit with the determined coordinates that sends corrections to the moving unit or rover. If the base is set over the known point, it provides absolute accuracy.
Configuration
Vous pouvez configurer le SC pour votre projet de plusieurs façons.
Choisir dans la bibliothèque
Emlid Flow et Emlid Flow 360 contiennent le registre vérifié des SC locaux pour des pays spécifiques. Chaque
Coordinate system is a coordinate-based local, regional or global system used to locate geographical entities. A spatial reference system defines a specific map projection, as well as transformations between different spatial reference systems.
Rover is one of the two GNSS receivers that is used for collecting data in RTK or PPK scenarios. Rover is a moving unit: the surveyor uses rover to record the points, while rover receives the corrections from the static base.
The Networked Transport of RTCM via Internet Protocol or NTRIP network is an alternative source of corrections. NTRIP allows your rover to accept corrections over the Internet with no need for the second local receiver acting as a base. A reference station collects data, then sends it to NTRIP caster, where it is retransmitted through the Internet port to the client rover connected via a particular port and authorized.
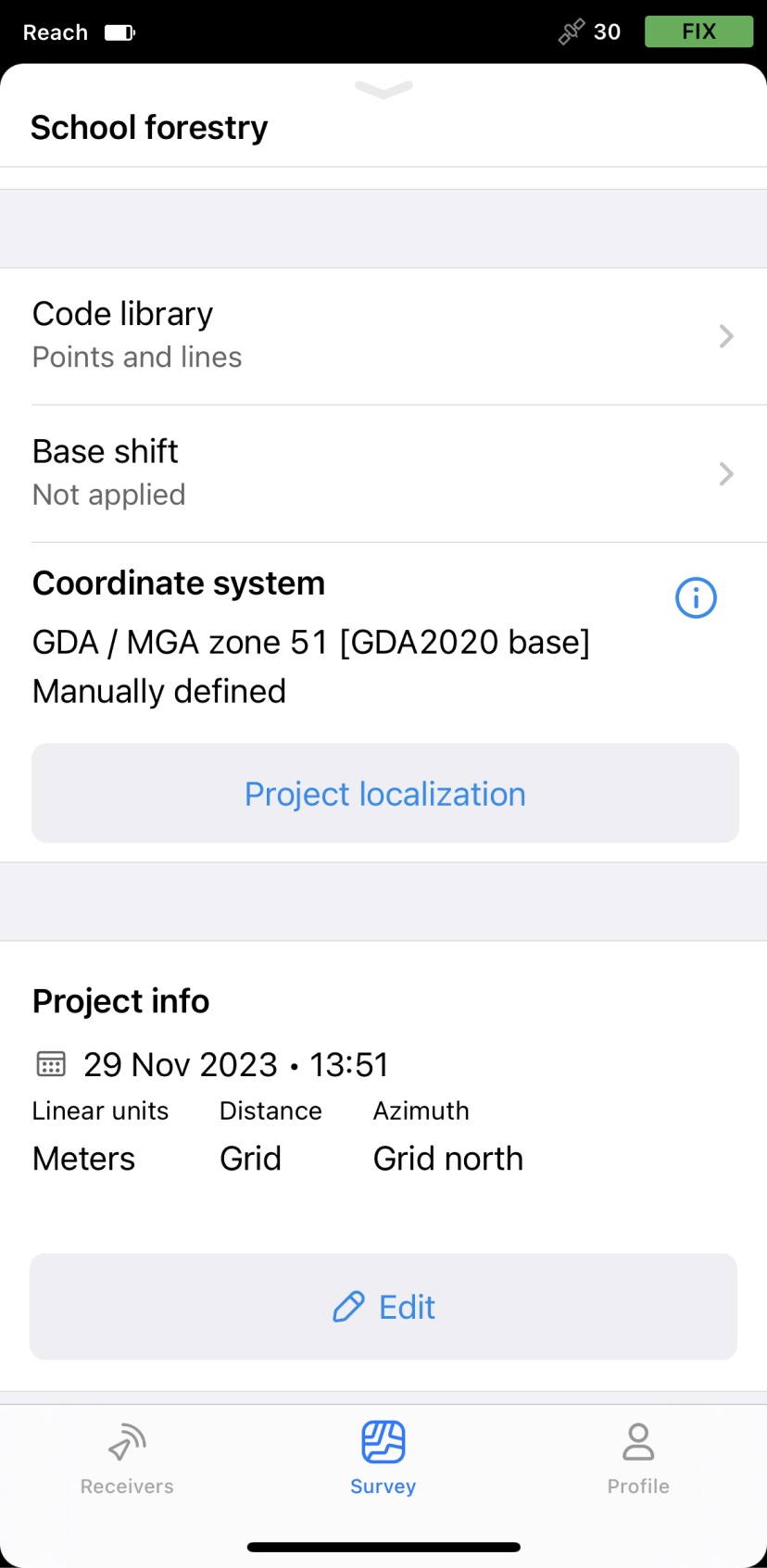
Dans ce cas, les applications appliquent la
Grid distance is the distance measured on the projection flat plane.
Grid North azimuth is the angle measured clockwise between a line parallel to the central meridian, and the direction to a point of interest (a straight line between two points on the projection flat plane).
Voici un exemple de
Coordinate system is a coordinate-based local, regional or global system used to locate geographical entities. A spatial reference system defines a specific map projection, as well as transformations between different spatial reference systems.
Rover is one of the two GNSS receivers that is used for collecting data in RTK or PPK scenarios. Rover is a moving unit: the surveyor uses rover to record the points, while rover receives the corrections from the static base.
The Networked Transport of RTCM via Internet Protocol or NTRIP network is an alternative source of corrections. NTRIP allows your rover to accept corrections over the Internet with no need for the second local receiver acting as a base. A reference station collects data, then sends it to NTRIP caster, where it is retransmitted through the Internet port to the client rover connected via a particular port and authorized.
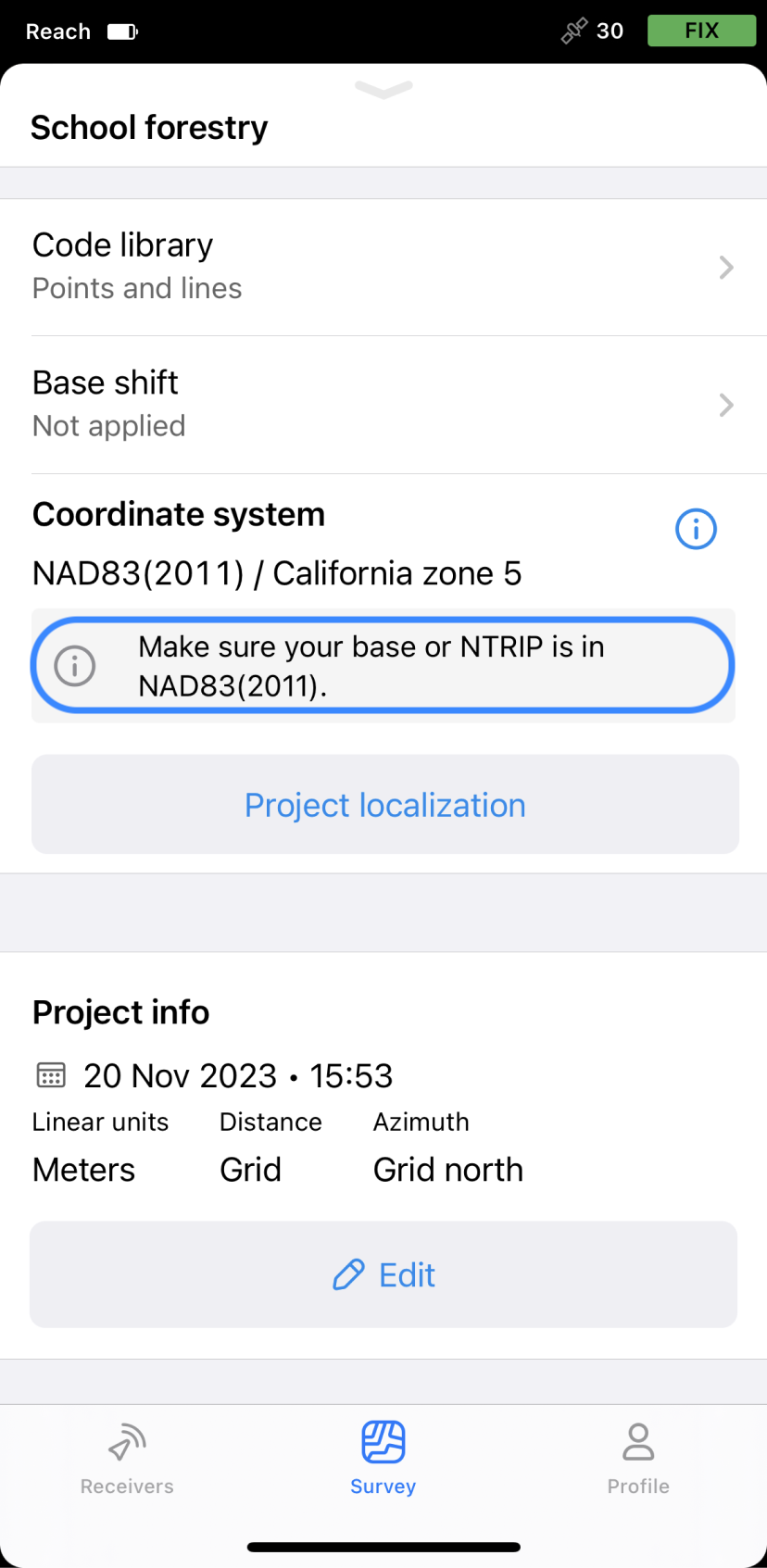
California zone 5 — une projection.
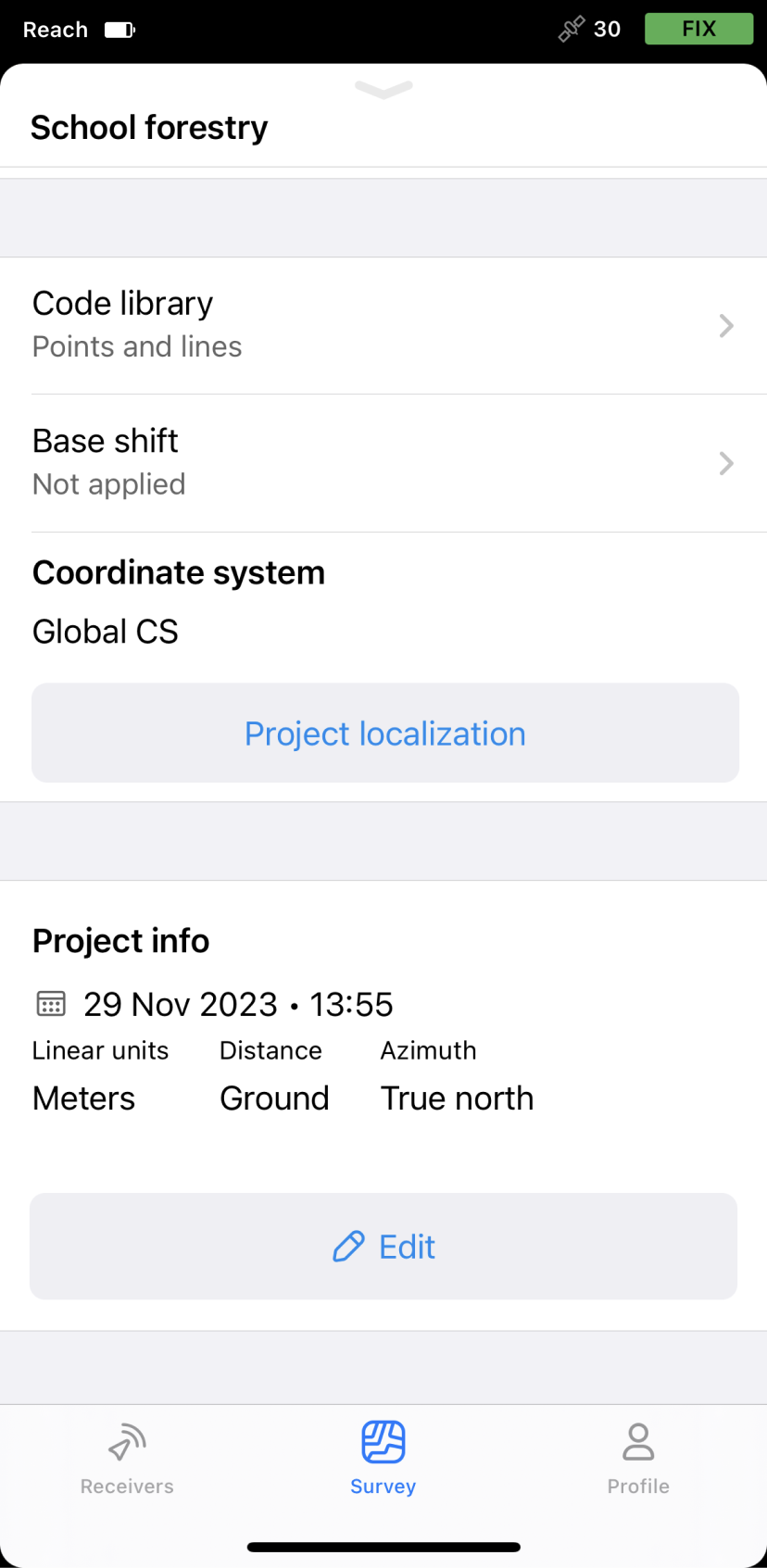
Appliquer le SC global
Cette option est utilisée pour démarrer avec l'application Emlid Flow et effectuer des tests rapides sur le terrain. En conséquence, vous obtenez des coordonnées géographiques (latitude, longitude, hauteur ellipsoïdale) dans le datum de votre base.
Dans ce cas, les applications appliquent la
Ground distance is the distance measured on the actual surface of the Earth, taking the mean elevation of the measured points into account.
True North azimuth is the angle ranging from 0 to 360 degrees measured clockwise between True North and the direction to a point of interest.
Voici un exemple d'utilisation de l'option SC global dans Emlid Flow & Emlid Flow 360. Si vous entrez les coordonnées de la base en NAD83(2011) dans les paramètres de la base, vous obtiendrez par défaut les coordonnées NAD83(2011) avec le
Rover is one of the two GNSS receivers that is used for collecting data in RTK or PPK scenarios. Rover is a moving unit: the surveyor uses rover to record the points, while rover receives the corrections from the static base.
Utiliser un SC personnalisé
Si vous connaissez les paramètres de projection et que le système de coordonnées local requis n'est pas supporté dans Emlid Flow et Emlid Flow 360, vous pouvez ajouter votre propre SC en entrant les paramètres suivants :
Étant donné que tous les groupes de paramètres ne sont pas nécessaires pour la configuration d'un
Coordinate system is a coordinate-based local, regional or global system used to locate geographical entities. A spatial reference system defines a specific map projection, as well as transformations between different spatial reference systems.
- Ellipsoïde sur lequel votre datum est basé
- Type de projection et ses paramètres
- Type de transformation et ses paramètres
- Modèle géoïde
Dans ce cas, les applications appliquent la
Grid distance is the distance measured on the projection flat plane.
Grid North azimuth is the angle measured clockwise between a line parallel to the central meridian, and the direction to a point of interest (a straight line between two points on the projection flat plane).
Voici un exemple de configuration d'un SC personnalisé dans Emlid Flow.