Introdução aos sistemas de coordenadas
Visão geral
Para definir a localização precisa dos objetos pesquisados no mundo, é necessário configurar um
O sistema de coordenadas é um sistema local, regional ou global baseado em coordenadas, utilizado para localizar entidades geográficas. Um sistema de referência espacial define uma projeção cartográfica específica, assim como transformações entre diferentes sistemas de referência espacial.
Ao escolher um
O sistema de coordenadas é um sistema local, regional ou global baseado em coordenadas, utilizado para localizar entidades geográficas. Um sistema de referência espacial define uma projeção cartográfica específica, assim como transformações entre diferentes sistemas de referência espacial.
O sistema de coordenadas é um sistema local, regional ou global baseado em coordenadas, utilizado para localizar entidades geográficas. Um sistema de referência espacial define uma projeção cartográfica específica, assim como transformações entre diferentes sistemas de referência espacial.
O Rover é um dos dois receptores GNSS que é utilizado para coletar dados em cenários RTK ou PPK. O rover é uma unidade móvel: o topógrafo utiliza o rover para registrar os pontos, enquanto o rover recebe as correções da base estática.
Uma incompatibilidade na configuração do SC entre o
O Rover é um dos dois receptores GNSS que é utilizado para coletar dados em cenários RTK ou PPK. O rover é uma unidade móvel: o topógrafo utiliza o rover para registrar os pontos, enquanto o rover recebe as correções da base estática.
A base é um dos receptores que atua como estação de referência em cenários RTK ou PPK. É uma unidade estática com as coordenadas determinadas que envia correções para a unidade móvel ou rover. Se a base for colocada sobre o ponto conhecido, ela vai proporcionar uma exatidão absoluta.
Configuração
Você pode configurar o SC para seu projeto de várias maneiras.
Escolher da biblioteca
O Emlid Flow e o Emlid Flow 360 contêm o registro verificado de SCs locais para países específicos. Todo
O sistema de coordenadas é um sistema local, regional ou global baseado em coordenadas, utilizado para localizar entidades geográficas. Um sistema de referência espacial define uma projeção cartográfica específica, assim como transformações entre diferentes sistemas de referência espacial.
O Rover é um dos dois receptores GNSS que é utilizado para coletar dados em cenários RTK ou PPK. O rover é uma unidade móvel: o topógrafo utiliza o rover para registrar os pontos, enquanto o rover recebe as correções da base estática.
A rede NTRIP (Networked Transport of RTCM via Internet Protocol) é uma fonte alternativa de correções. O NTRIP permite que o seu rover aceite correções através da Internet, sem a necessidade de um segundo receptor local funcionando como base. Uma estação de referência colhe os dados e envia-os para o NTRIP caster, onde são retransmitidos através da porta Internet para o rover cliente conectado através de uma porta específica e autorizada.
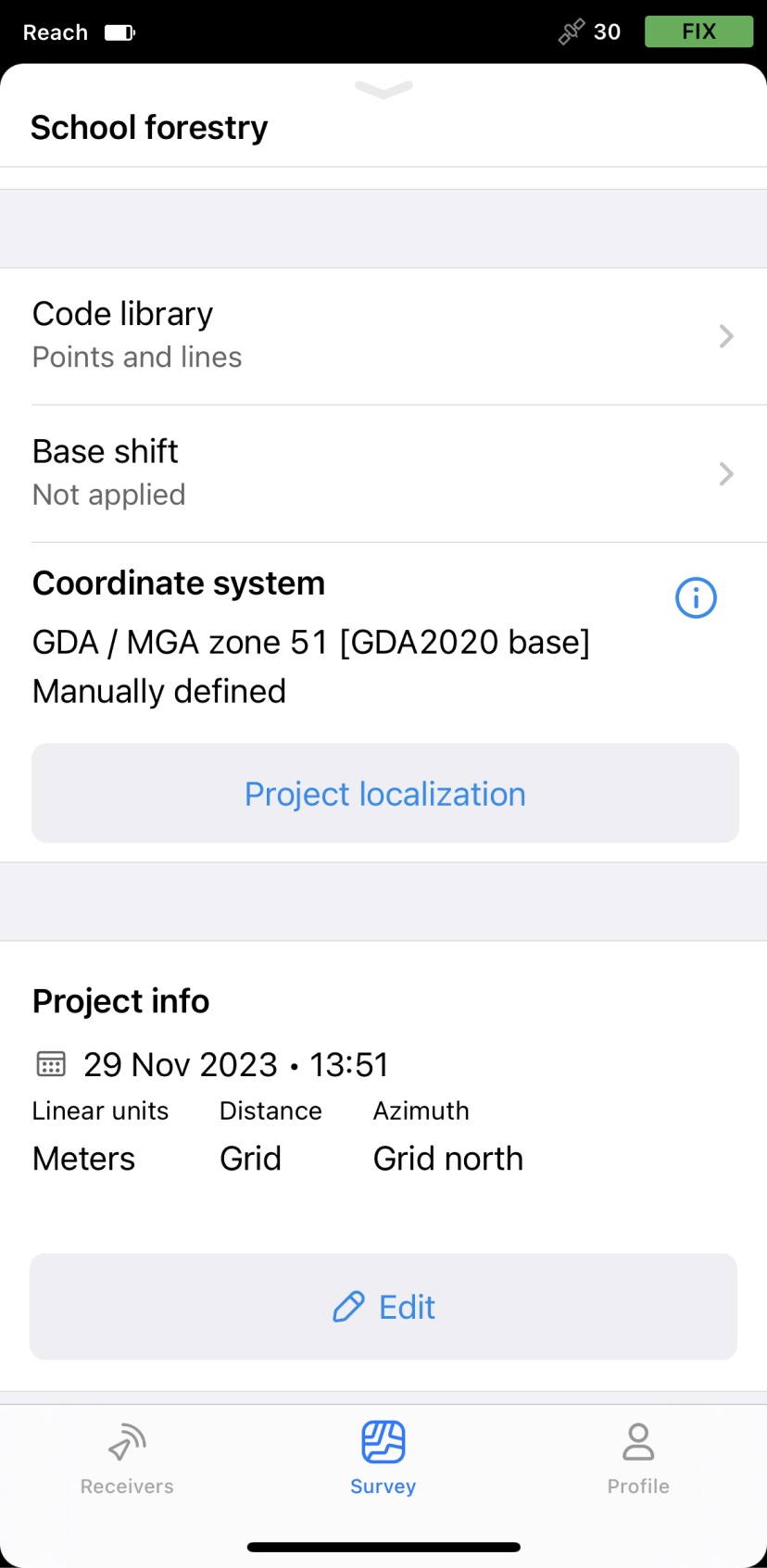
Nesse caso, os aplicativos aplicam a
A distância cartográfica é a distância medida no plano da projeção.
O azimute norte cartográfico é o ângulo medido no sentido horário entre uma linha paralela ao meridiano central e a direção de um ponto de interesse (uma linha reta entre dois pontos no plano da projeção).
Abaixo está um exemplo de um
O sistema de coordenadas é um sistema local, regional ou global baseado em coordenadas, utilizado para localizar entidades geográficas. Um sistema de referência espacial define uma projeção cartográfica específica, assim como transformações entre diferentes sistemas de referência espacial.
O Rover é um dos dois receptores GNSS que é utilizado para coletar dados em cenários RTK ou PPK. O rover é uma unidade móvel: o topógrafo utiliza o rover para registrar os pontos, enquanto o rover recebe as correções da base estática.
A rede NTRIP (Networked Transport of RTCM via Internet Protocol) é uma fonte alternativa de correções. O NTRIP permite que o seu rover aceite correções através da Internet, sem a necessidade de um segundo receptor local funcionando como base. Uma estação de referência colhe os dados e envia-os para o NTRIP caster, onde são retransmitidos através da porta Internet para o rover cliente conectado através de uma porta específica e autorizada.
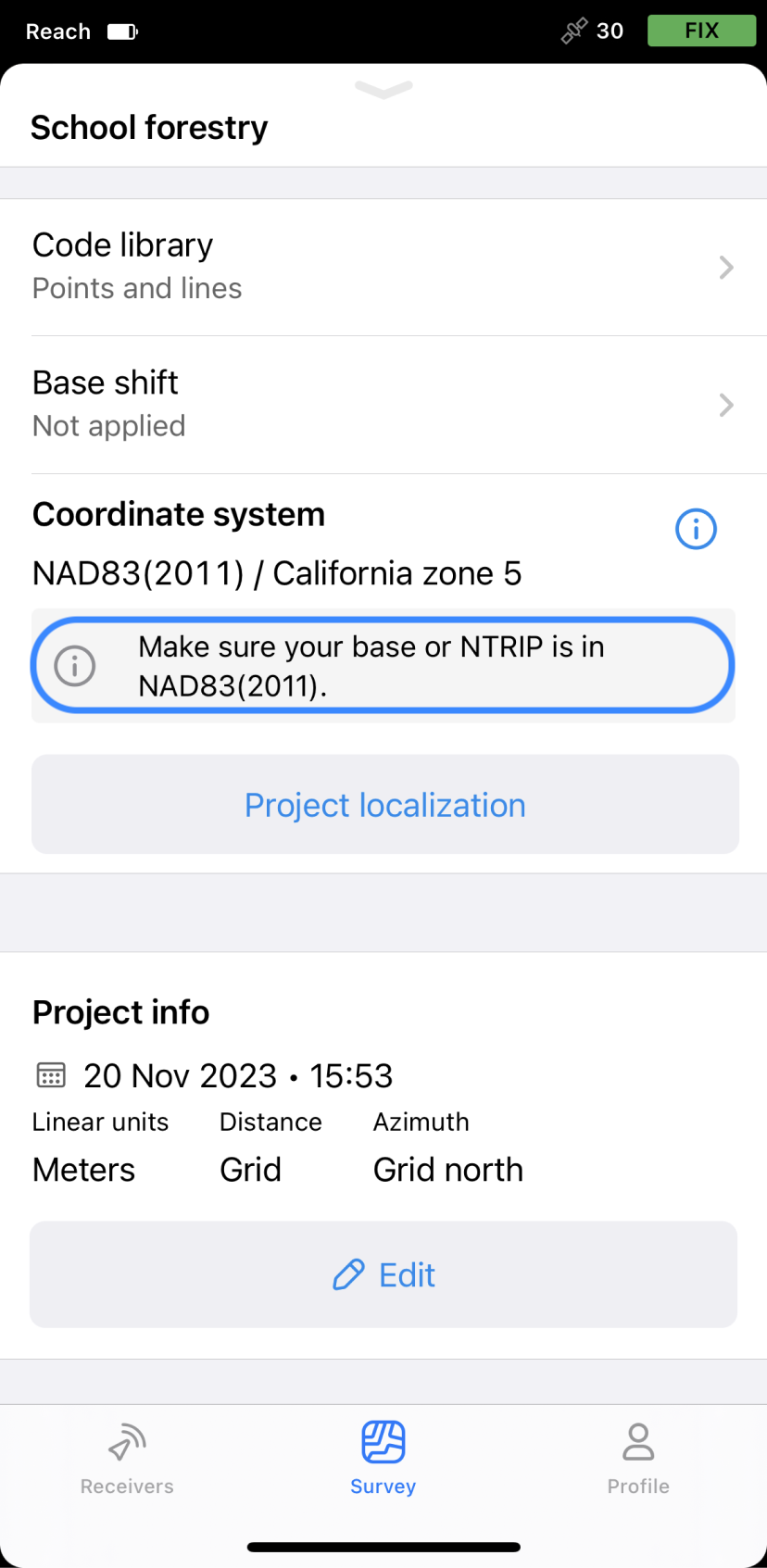
Projeção da zona 5-a da Califórnia.
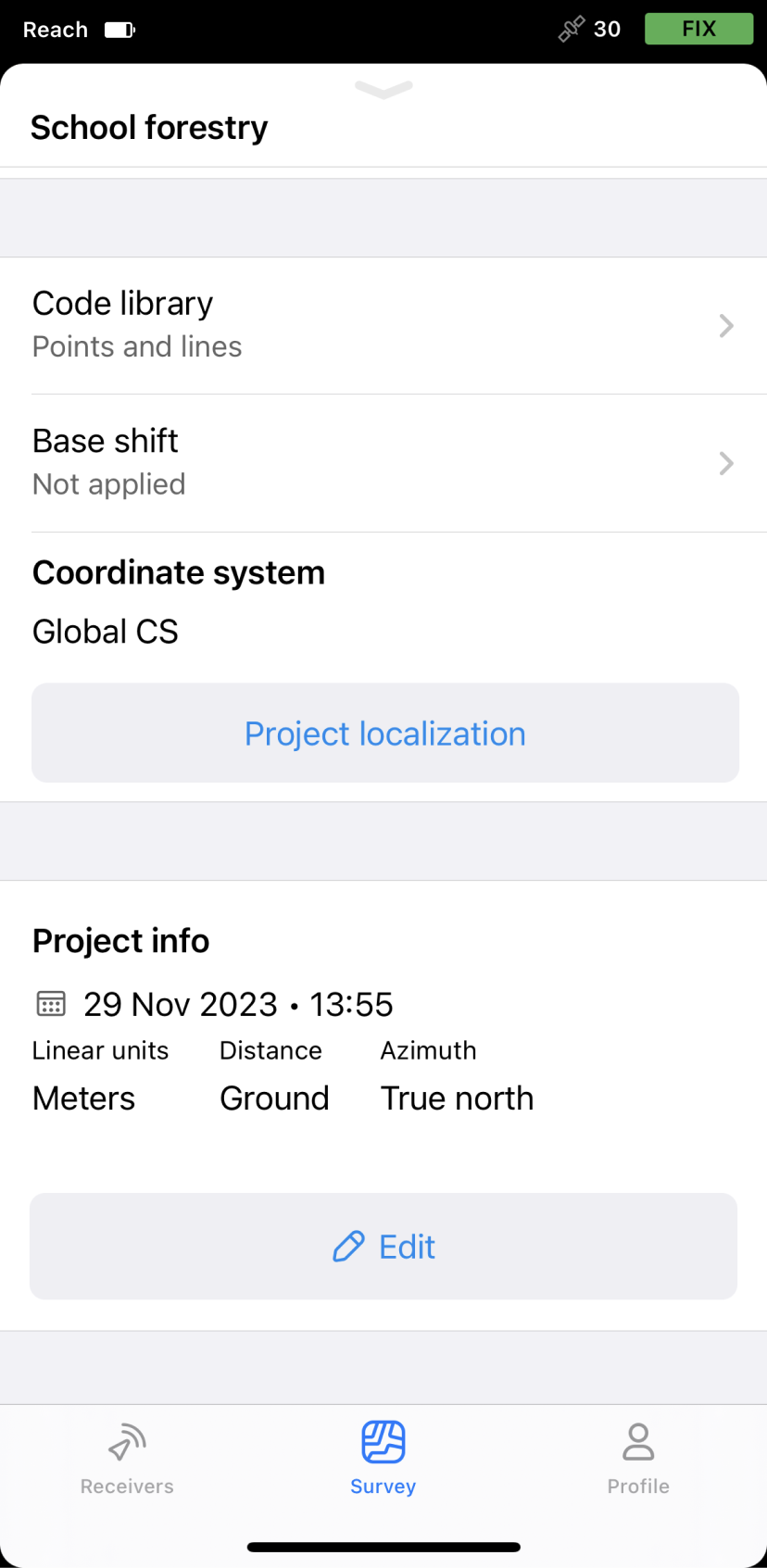
Aplicar SC global
Essa opção é usada para começar a usar o aplicativo Emlid Flow e fazer testes rápidos no campo. Como resultado, você obtém coordenadas geográficas - latitude, longitude, altura do elipsoide - no datum de sua base.
Nesse caso, os aplicativos aplicam a
A distância terrestre é a distância medida na superfície real da Terra, levando em conta a elevação média dos pontos medidos.
O azimute norte verdadeiro é o ângulo que varia de 0 a 360 graus, medido no sentido horário, entre o norte verdadeiro e a direção de um ponto de interesse.
Veja a seguir um exemplo de uso da opção Global SC no Emlid Flow & Emlid Flow 360. Se você inserir as coordenadas de base em NAD83(2011) nas configurações da Base, obterá as coordenadas NAD83(2011) com o
O Rover é um dos dois receptores GNSS que é utilizado para coletar dados em cenários RTK ou PPK. O rover é uma unidade móvel: o topógrafo utiliza o rover para registrar os pontos, enquanto o rover recebe as correções da base estática.
Usar SC personalizado
Se você conhece os parâmetros de projeção e o sistema de coordenadas local necessário não é compatível com o Emlid Flow e o Emlid Flow 360, você pode adicionar seu próprio SC inserindo os seguintes parâmetros:
Como nem todos os grupos de parâmetros são necessários para a configuração de um
O sistema de coordenadas é um sistema local, regional ou global baseado em coordenadas, utilizado para localizar entidades geográficas. Um sistema de referência espacial define uma projeção cartográfica específica, assim como transformações entre diferentes sistemas de referência espacial.
- Elipsoide no qual seu datum se baseia
- Tipo de projeção e seus parâmetros
- Tipo de transformação e seus parâmetros
- Modelo geoide
Nesse caso, os aplicativos aplicam a
A distância cartográfica é a distância medida no plano da projeção.
O azimute norte cartográfico é o ângulo medido no sentido horário entre uma linha paralela ao meridiano central e a direção de um ponto de interesse (uma linha reta entre dois pontos no plano da projeção).
Abaixo está o exemplo de um SC personalizado configurado no Emlid Flow.