Einführung in Koordinatensysteme
Übersicht
Um die genaue Position der vermessenen Objekte in der Welt zu definieren, müssen Sie beim Erstellen eines Projekts ein
Ein Koordinatensystem ist ein koordinatenbasiertes lokales, regionales oder globales System, das zur Lokalisierung geografischer Einheiten verwendet wird. Ein räumliches Bezugssystem definiert eine bestimmte Kartenprojektion sowie Transformationen zwischen verschiedenen räumlichen Bezugssystemen.
Bei der Wahl eines
Ein Koordinatensystem ist ein koordinatenbasiertes lokales, regionales oder globales System, das zur Lokalisierung geografischer Einheiten verwendet wird. Ein räumliches Bezugssystem definiert eine bestimmte Kartenprojektion sowie Transformationen zwischen verschiedenen räumlichen Bezugssystemen.
Ein Koordinatensystem ist ein koordinatenbasiertes lokales, regionales oder globales System, das zur Lokalisierung geografischer Einheiten verwendet wird. Ein räumliches Bezugssystem definiert eine bestimmte Kartenprojektion sowie Transformationen zwischen verschiedenen räumlichen Bezugssystemen.
Der Rover ist einer der beiden GNSS-Empfänger, die für die Datenerfassung in RTK- oder PPK-Szenarien verwendet werden. Der Rover ist eine bewegliche Einheit: Der Vermesser benutzt den Rover zur Aufzeichnung der Punkte, während der Rover die Korrekturen von der statischen Basis erhält.
Wenn die KS-Einstellungen zwischen Ihrem
Der Rover ist einer der beiden GNSS-Empfänger, die für die Datenerfassung in RTK- oder PPK-Szenarien verwendet werden. Der Rover ist eine bewegliche Einheit: Der Vermesser benutzt den Rover zur Aufzeichnung der Punkte, während der Rover die Korrekturen von der statischen Basis erhält.
Die Basis ist einer der Empfänger, die in RTK- oder PPK-Szenarien als Referenzstation dienen. Es ist eine statische Einheit mit den ermittelten Koordinaten, die Korrekturen an die bewegliche Einheit oder an den Rover sendet. Wird die Basis über den bekannten Punkt gesetzt, ist absolute Genauigkeit gewährleistet.
Einrichtung
Sie können das KS für Ihr Projekt auf verschiedene Weise einrichten.
Auswahl aus der Bibliothek
Emlid Flow und Emlid Flow 360 enthalten das geprüfte Register des lokalen KS für bestimmte Länder. Jedes
Ein Koordinatensystem ist ein koordinatenbasiertes lokales, regionales oder globales System, das zur Lokalisierung geografischer Einheiten verwendet wird. Ein räumliches Bezugssystem definiert eine bestimmte Kartenprojektion sowie Transformationen zwischen verschiedenen räumlichen Bezugssystemen.
Der Rover ist einer der beiden GNSS-Empfänger, die für die Datenerfassung in RTK- oder PPK-Szenarien verwendet werden. Der Rover ist eine bewegliche Einheit: Der Vermesser benutzt den Rover zur Aufzeichnung der Punkte, während der Rover die Korrekturen von der statischen Basis erhält.
Das NTRIP-Netz (Networked Transport of RTCM via Internet Protocol) ist eine alternative Quelle für Korrekturen. NTRIP ermöglicht es Ihrem Rover, Korrekturen über das Internet anzunehmen, ohne dass ein zweiter lokaler Empfänger als Basis benötigt wird. Eine Referenzstation erfasst Daten und sendet sie an den NTRIP-Caster, der sie über den Internet-Port an den über einen bestimmten Port angeschlossenen und autorisierten Client-Rover weiterleitet.
In diesem Fall wenden die Apps
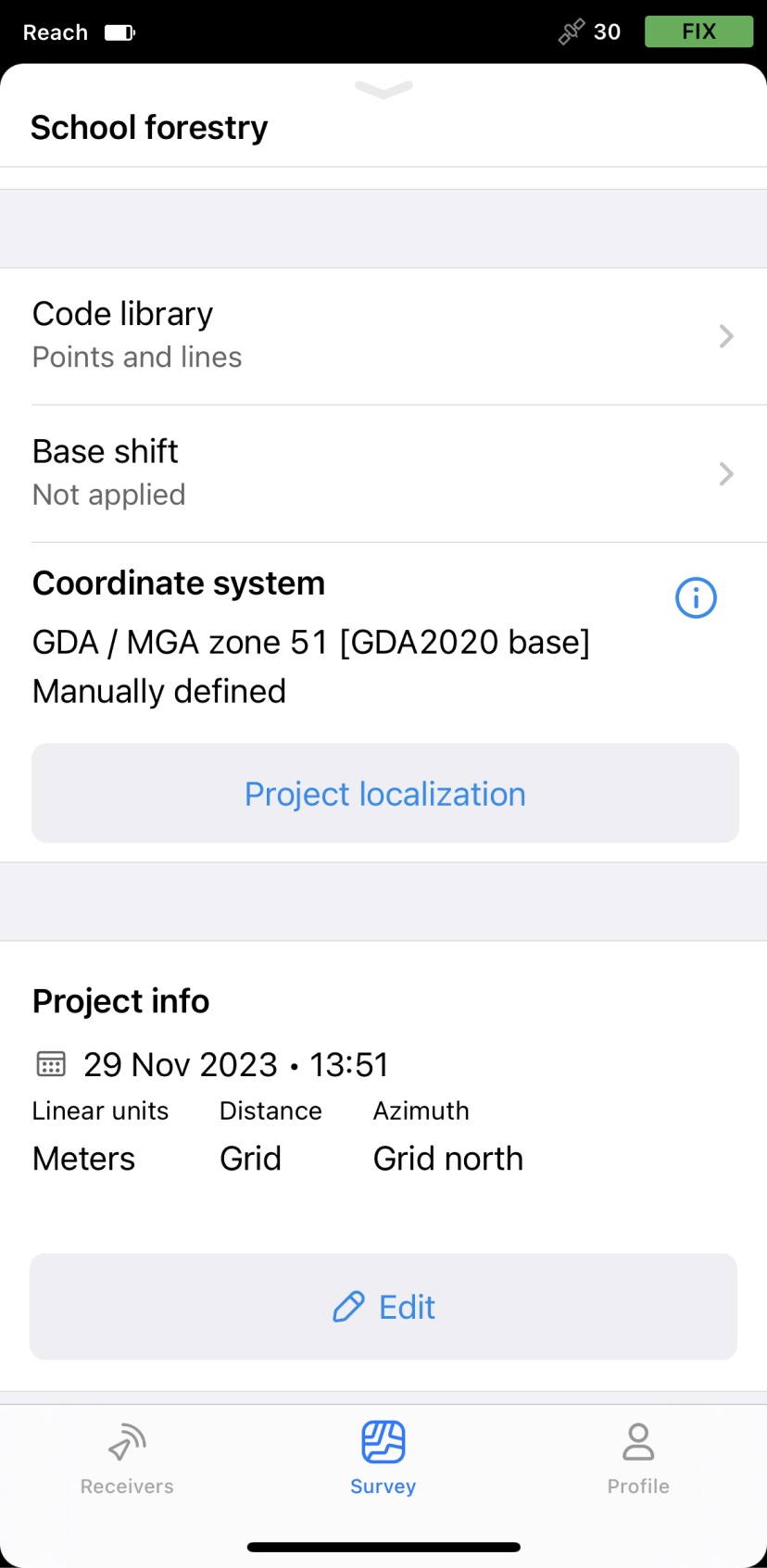
Der Gitterabstand ist der auf der ebenen Projektionsfläche gemessene Abstand.
Der Gitternord-Azimut ist der im Uhrzeigersinn gemessene Winkel zwischen einer zum Zentralmeridian parallelen Linie und der Richtung zu einem Punkt von Interesse (eine gerade Linie zwischen zwei Punkten auf der Projektionsebene).
Im Folgenden finden Sie ein Beispiel für ein lokales
Ein Koordinatensystem ist ein koordinatenbasiertes lokales, regionales oder globales System, das zur Lokalisierung geografischer Einheiten verwendet wird. Ein räumliches Bezugssystem definiert eine bestimmte Kartenprojektion sowie Transformationen zwischen verschiedenen räumlichen Bezugssystemen.
Der Rover ist einer der beiden GNSS-Empfänger, die für die Datenerfassung in RTK- oder PPK-Szenarien verwendet werden. Der Rover ist eine bewegliche Einheit: Der Vermesser benutzt den Rover zur Aufzeichnung der Punkte, während der Rover die Korrekturen von der statischen Basis erhält.
Das NTRIP-Netz (Networked Transport of RTCM via Internet Protocol) ist eine alternative Quelle für Korrekturen. NTRIP ermöglicht es Ihrem Rover, Korrekturen über das Internet anzunehmen, ohne dass ein zweiter lokaler Empfänger als Basis benötigt wird. Eine Referenzstation erfasst Daten und sendet sie an den NTRIP-Caster, der sie über den Internet-Port an den über einen bestimmten Port angeschlossenen und autorisierten Client-Rover weiterleitet.
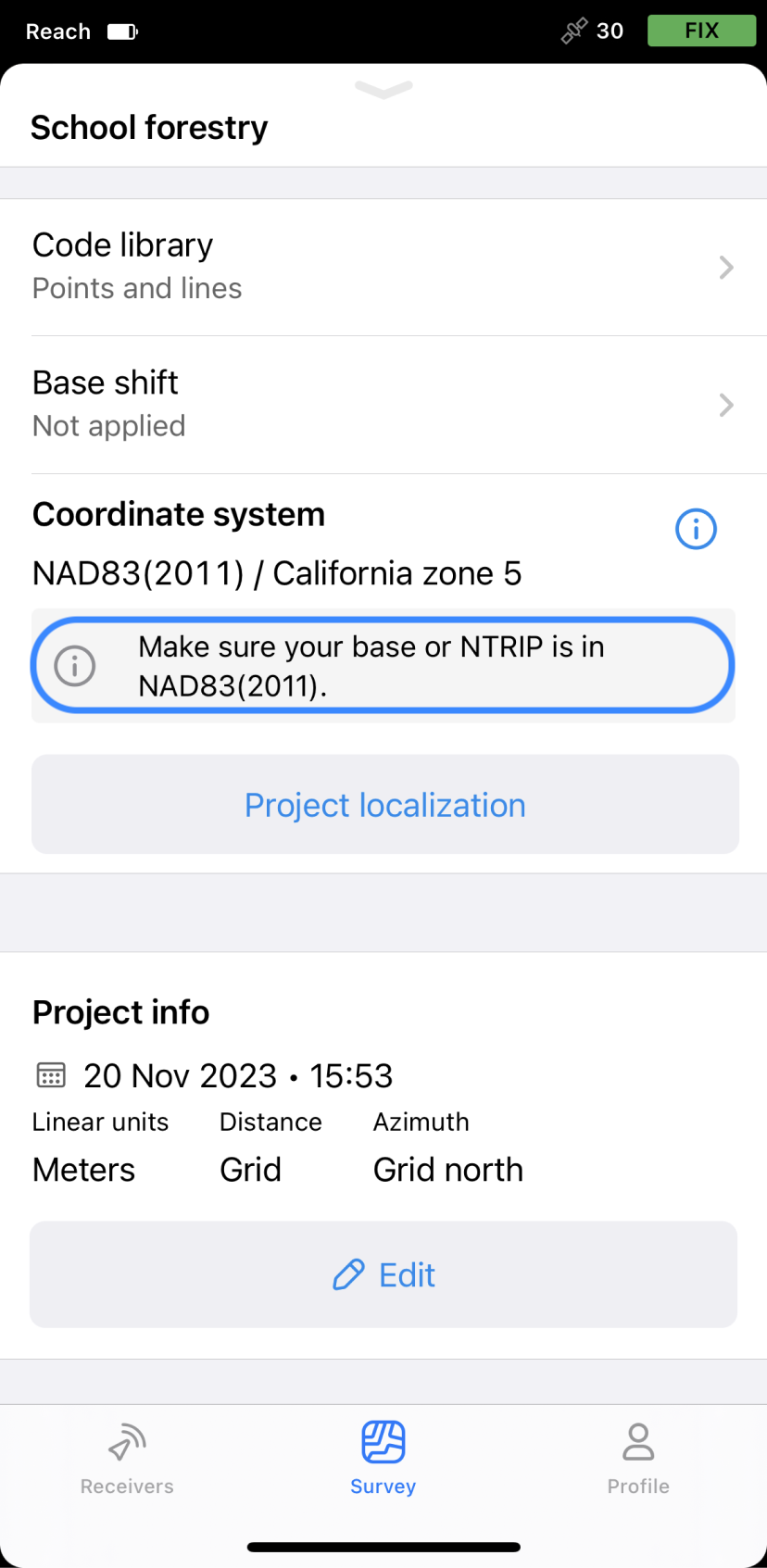
Kalifornien Zone 5-a Projektion.
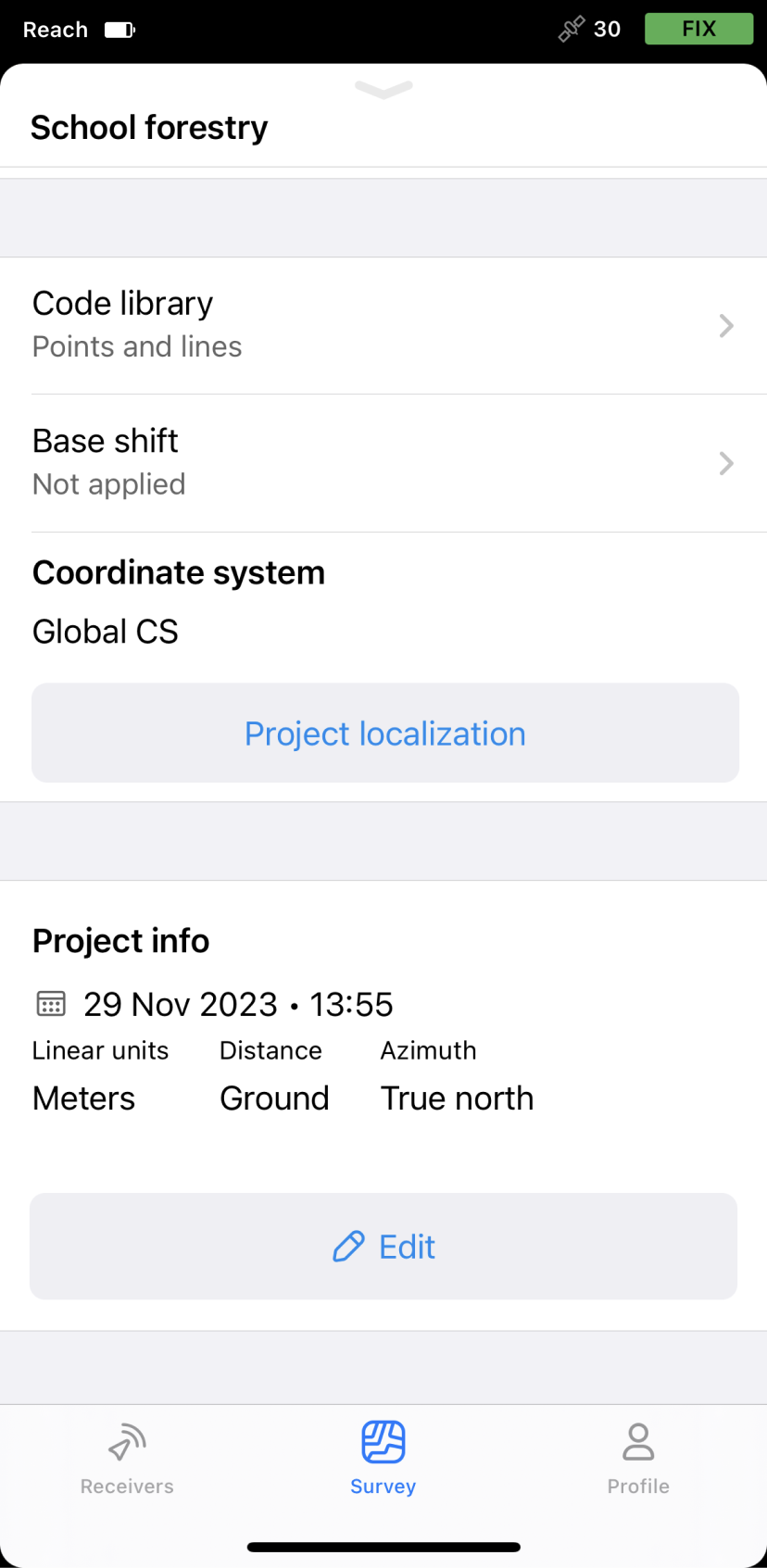
Globales KS anwenden
Diese Option wird für die ersten Schritte mit der Emlid Flow App und für schnelle Tests vor Ort verwendet. Als Ergebnis erhalten Sie geografische Koordinaten – Breitengrad, Längengrad, Ellipsoidische Höhe – als Datum für Ihre Basis.
In diesem Fall gelten die Anwendungen
Die Bodenentfernung ist die auf der tatsächlichen Erdoberfläche gemessene Entfernung, wobei die mittlere Höhe der gemessenen Punkte berücksichtigt wird.
Der Nordazimut ist der im Uhrzeigersinn gemessene Winkel von 0 bis 360 Grad zwischen Norden und der Richtung zu einem Punkt von Interesse.
Im Folgenden finden Sie ein Beispiel für die Verwendung des Option Global KS in Emlid Flow & Emlid Flow 360. Wenn Sie die Basiskoordinaten in NAD83(2011) in den Basiseinstellungen eingeben, erhalten Sie mit dem
Der Rover ist einer der beiden GNSS-Empfänger, die für die Datenerfassung in RTK- oder PPK-Szenarien verwendet werden. Der Rover ist eine bewegliche Einheit: Der Vermesser benutzt den Rover zur Aufzeichnung der Punkte, während der Rover die Korrekturen von der statischen Basis erhält.
Benutzerdefinierte KS verwenden
Wenn Sie die Projektionsparameter kennen und das gewünschte lokale Koordinatensystem in Emlid Flow und Emlid Flow 360 nicht unterstützt wird, können Sie Ihr eigenes CS hinzufügen, indem Sie die folgenden Parameter eingeben:
Da nicht jede Gruppe von Parametern für eine
Ein Koordinatensystem ist ein koordinatenbasiertes lokales, regionales oder globales System, das zur Lokalisierung geografischer Einheiten verwendet wird. Ein räumliches Bezugssystem definiert eine bestimmte Kartenprojektion sowie Transformationen zwischen verschiedenen räumlichen Bezugssystemen.
- Ellipsoid, auf dem Ihr Datum basiert
- Projektionsart und ihre Parameter
- Transformationsart und ihre Parameter
- Geoid-Modell
In diesem Fall wenden die Apps
Der Gitterabstand ist der auf der ebenen Projektionsfläche gemessene Abstand.
Der Gitternord-Azimut ist der im Uhrzeigersinn gemessene Winkel zwischen einer zum Zentralmeridian parallelen Linie und der Richtung zu einem Punkt von Interesse (eine gerade Linie zwischen zwei Punkten auf der Projektionsebene).
Nachfolgend sehen Sie ein Beispiel für ein benutzerdefiniertes KS, das in Emlid Flow eingerichtet wurde.