Integrazione del drone Skydio X10 RTK e della base Reach RS3
Questa guida mostra come configurare il proprio Reach RS3 come base per i droni Skydio X10 RTK per georeferenziare le immagini del drone per la mappatura successiva in un software di fotogrammetria.
Ulteriori informazioni su RTK nell'articolo Come funziona l'RTK.
Panoramica
I droni Skydio X10 RTK utilizzano l'NTRIP per ricevere le correzioni, il che consente di utilizzare Reach RS3 come stazione base. Reach può inviare correzioni NTRIP tramite Emlid Caster attraverso Internet o utilizzando l'opzione NTRIP locale in Emlid Flow senza connessione a Internet.
Per configurare il proprio Reach RS3 come base per il drone Skydio RTK, sarà necessario quanto segue:
- Accessorio per drone Skydio X10 RTK con VT300-L o VT300-Z
- Controller Skydio X10
- Reach RS3 come base
- Uno smartphone o un tablet con l'app Emlid Flow installata
- Connessione Internet su entrambi i dispositivi se si utilizza Emlid Caster
- Account Emlid per accedere a Emlid Caster
L'elenco dei pacchetti di sensori può cambiare man mano che Skydio aggiunge altri gimbal e sensori. Per informazioni più precise, consultare le ultime raccomandazioni.
Configurare Reach RS3 come base utilizzando Local NTRIP
Questa configurazione funzionerà solo per il proprio drone Skydio RTK se supporta una connessione Wi-Fi.
Per configurare il proprio Reach come base per il drone Skydio RTK utilizzando l'opzione Local NTRIP in Emlid Flow, seguire i passaggi seguenti:
-
Posizionare il proprio Reach sul treppiede e assicurargli una visuale libera del cielo.
suggerimentoPer saperne di più sul posizionamento e la configurazione della base, consultare le guide Posizionamento e Scelta del metodo di configurazione della base.
-
Aprire Emlid Flow e connettersi al proprio Reach.
-
Toccare Base output (Output base) e selezionare l'opzione Local NTRIP (NTRIP locale). Verranno visualizzate le credenziali per il proprio drone.
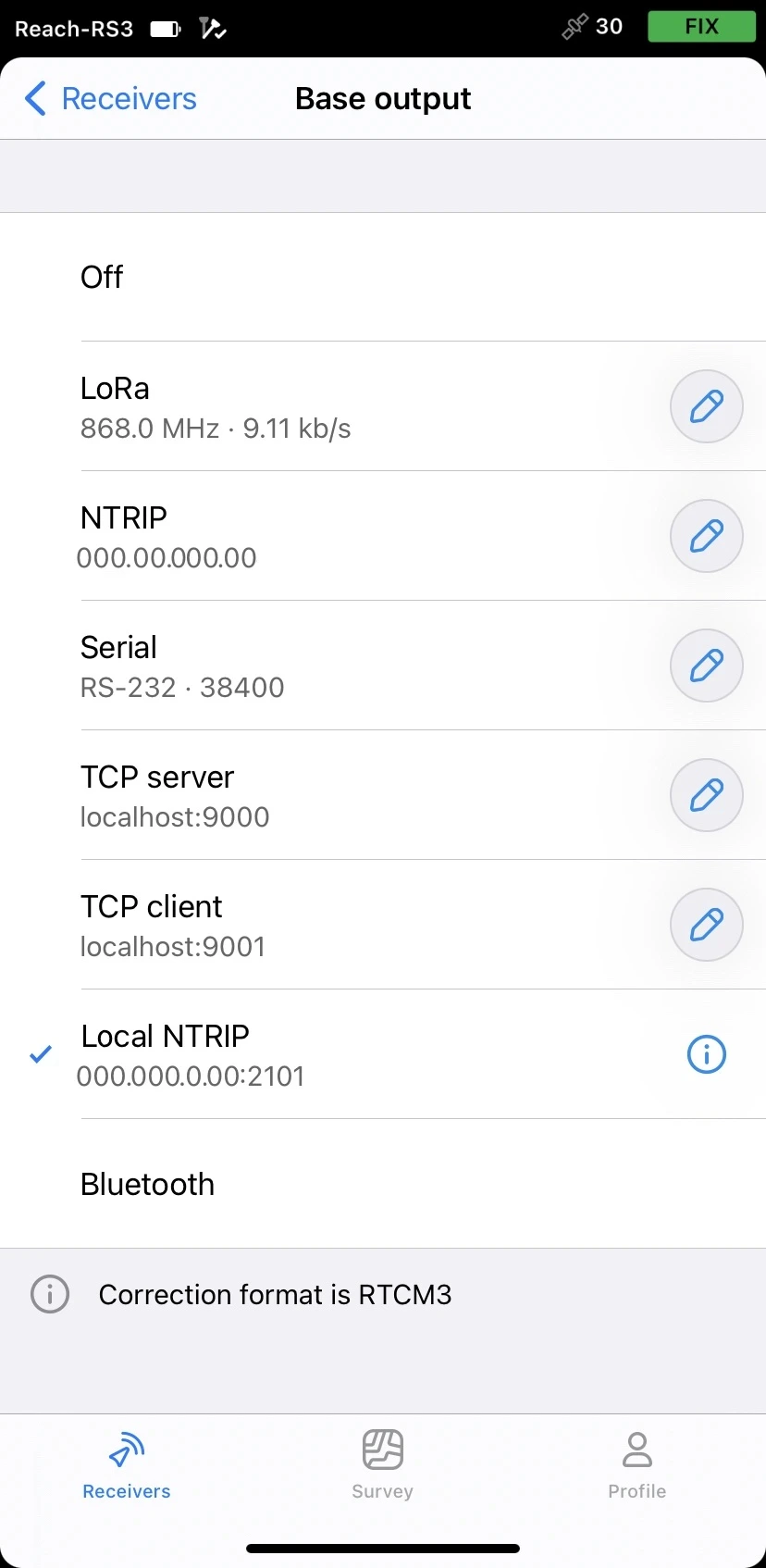

Ora è necessario connettere il controller del proprio drone all'hotspot del Reach e inserire le credenziali ottenute per stabilire la trasmissione delle correzioni.
Configurare Reach RS3 come base utilizzando Emlid Caster
Questa configurazione funzionerà solo per il proprio drone Skydio RTK se supporta una connessione a Internet.
Per configurare il proprio Reach RS3 come base per il drone Skydio RTK utilizzando Emlid Caster, è necessario accedere a Emlid Caster e ottenere le credenziali NTRIP. Seguire i passaggi riportati di seguito:
-
Accedere a Emlid Caster e ottenere le credenziali NTRIP sia per la base che per il rover.
suggerimentoPer saperne di più, consultare la documentazione di Emlid Caster.
-
Posizionare il proprio Reach sul treppiede e assicurargli una visuale libera del cielo.
suggerimentoPer saperne di più sul posizionamento e la configurazione della base, consultare le guide Posizionamento e Scelta del metodo di configurazione della base.
-
Aprire Emlid Flow e connettersi al proprio ricevitore.
-
Collegare il proprio Reach a Internet.
suggerimentoPer saperne di più su come connettere il Reach RS3 a Internet, consultare le seguenti guide:
-
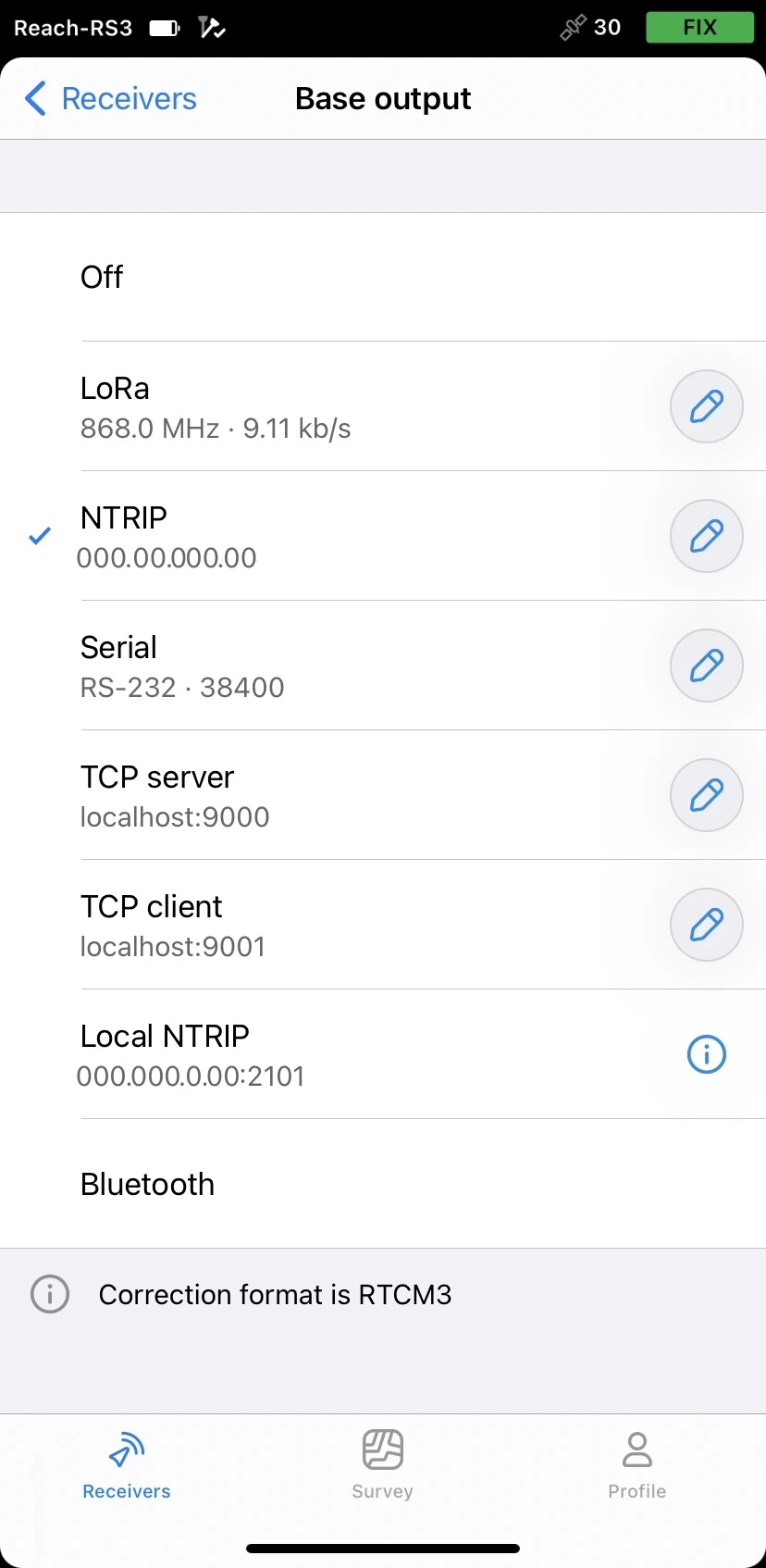
Nella schermata Receivers (Ricevitori), toccare Base output (Output base) e selezionare l'opzione NTRIP.
-
Toccare il pulsante Edit (Modifica) e inserire le credenziali NTRIP per la base ottenute in precedenza:
-
Address (Indirizzo): L'URL o l'indirizzo IP del server NTRIP.
-
Port (Porta): La porta utilizzata per connettersi al server NTRIP. Il valore di Default è solitamente 2101, a meno che il provider non specifichi una porta diversa.
-
Username: Il nome utente utilizzato per l'autenticazione con il servizio NTRIP. In alcuni casi, potrebbe essere il proprio nome o indirizzo e-mail.
-
Password: La password associata al nome utente.
-
Mount Point (Punto di montaggio): Il nome del flusso di correzione fornito dal servizio NTRIP.
suggerimentoPer scoprire quale punto di montaggio è più adatto, controllare il sito web del proprio fornitore NTRIP. In generale, distanze più brevi dalla stazione di riferimento migliorano le prestazioni RTK.

notePer garantire una trasmissione corretta delle correzioni, ricontrollare le credenziali inserite.
-
Ora è necessario inserire le credenziali del rover sul controller del proprio drone per stabilire una trasmissione di correzioni.
Configurare il drone Skydio come rover
Per configurare il drone Skydio utilizzando il controller X10, seguire i passaggi seguenti:
-
Installare l'accessorio RTK/PPK sul proprio drone. Per saperne di più sul processo, consultare la documentazione di Skydio.
-
Accendere il drone e il controller.
-
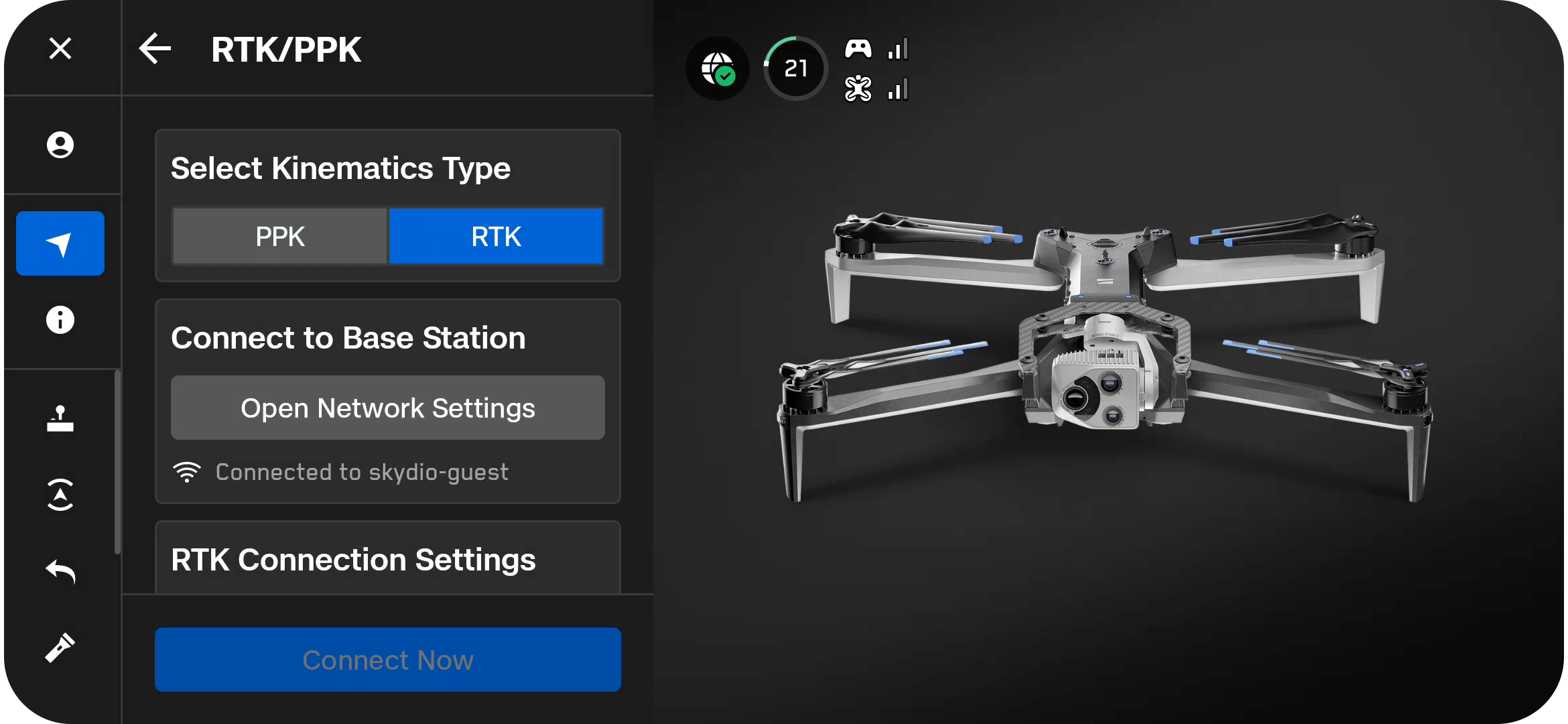
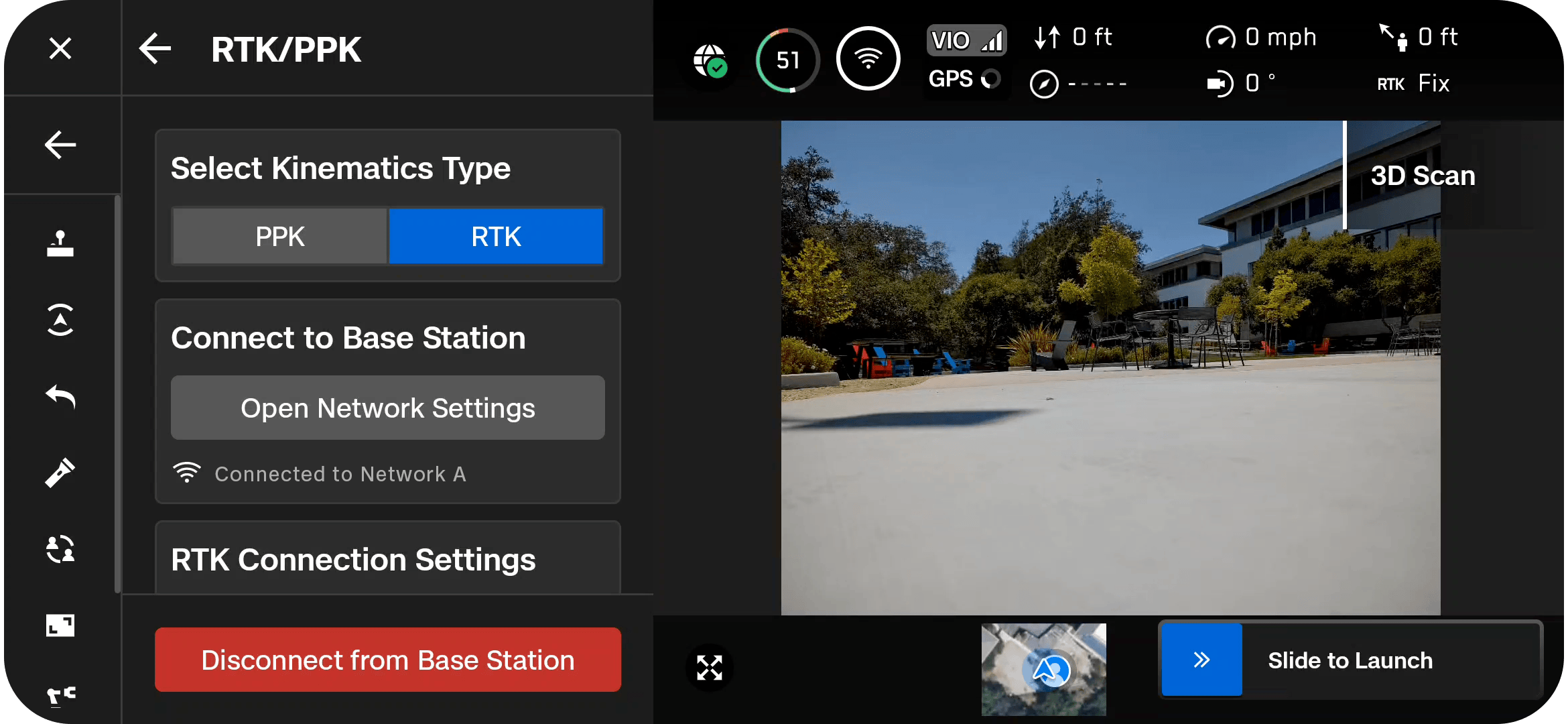
Una volta collegato l'accessorio, selezionare Set Up RTK (Configura RTK) nel controller.

-
In Connect to Base Station (Connetti alla stazione base), toccare Open Network Settings (Apri impostazioni di rete) per connettersi alla propria stazione base.
-
Inserire le credenziali ottenute quando si è effettuato l'accesso a Emlid Caster o si è abilitata l'opzione Local NTRIP (NTRIP locale) in Emlid Flow:
- NTRIP Host: L'URL o l'indirizzo IP del server NTRIP.
- Port (Porta): La porta utilizzata per connettersi al server NTRIP. Il valore di Default è solitamente 2101, a meno che il provider non specifichi una porta diversa.
- Account: Il nome utente utilizzato per autenticarsi con il servizio NTRIP. In alcuni casi, potrebbe essere il proprio nome o indirizzo e-mail.
- Password: La password associata al nome utente.
- Mount Point (Punto di montaggio): Il nome del flusso di correzione fornito dal servizio NTRIP.
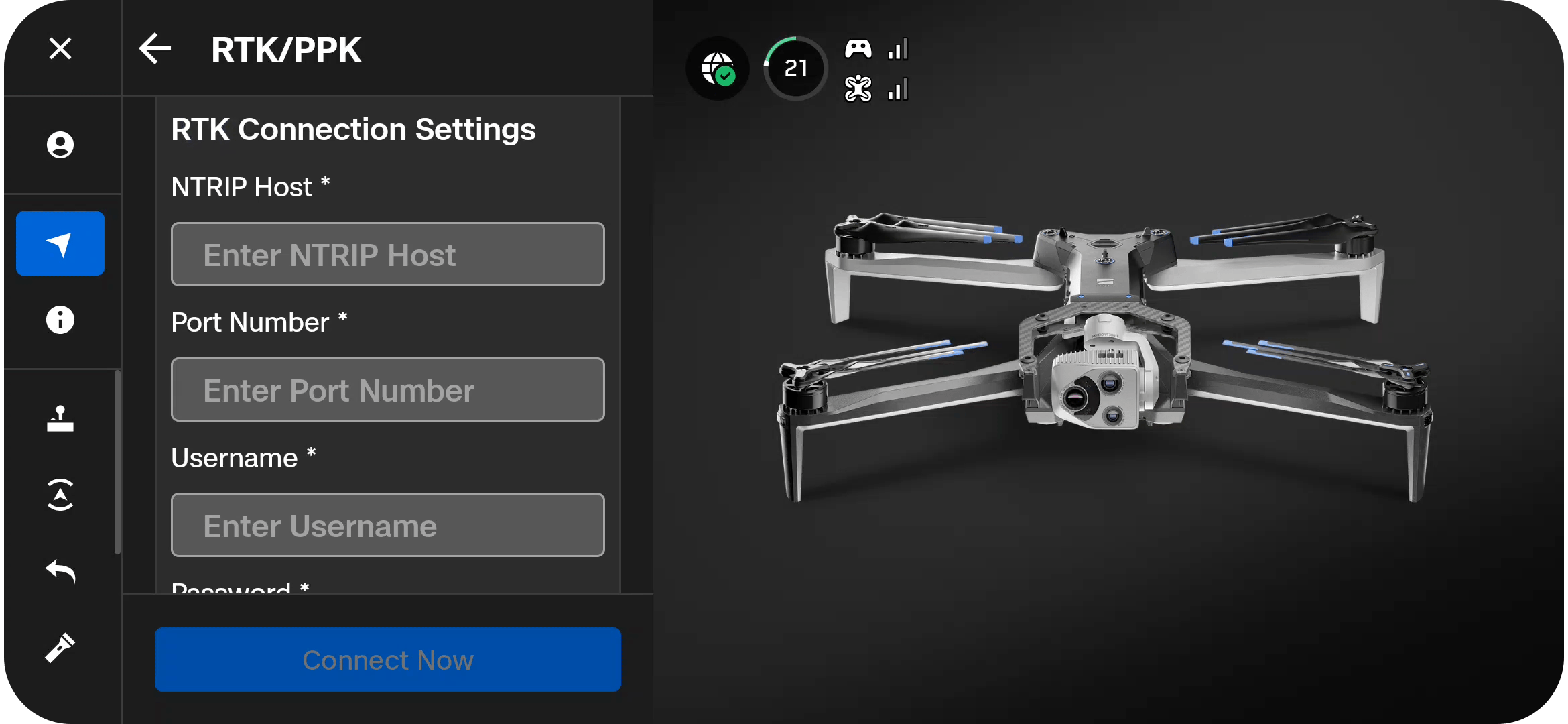
Assicurarsi di utilizzare le credenziali per il rover.
- Toccare Connect Now (Connetti ora). Una volta connessi, apparirà l'opzione Disconnect from Base Station (Disconnetti dalla stazione base) e l'indicatore di telemetria nell'angolo in alto a destra visualizzerà lo stato della soluzione. Lo stato FIX è necessario per procedere con il volo.

Eseguire il volo
Una volta stabilita la comunicazione tra il proprio Reach RS3 e il drone Skydio, è possibile procedere con la configurazione della missione di volo e con l'esecuzione del volo.
Per saperne di più sulla configurazione della missione di volo, seguire la sezione Complete a Map Capture nella documentazione di Skydio.