Intégration du drone Skydio X10 RTK et de la base Reach RS3
Ce guide montre comment configurer votre Reach RS3 comme base pour les drones Skydio X10 RTK afin de géotagger les images du drone pour une cartographie ultérieure dans un logiciel de photogrammétrie.
En savoir plus sur le RTK dans l'article Comment fonctionne le RTK.
Vue d'ensemble
Les drones Skydio X10 RTK utilisent NTRIP pour recevoir des corrections, ce qui vous permet d'utiliser Reach RS3 comme station de base. Reach peut envoyer des corrections NTRIP via Emlid Caster à travers internet ou en utilisant l'option NTRIP locale dans Emlid Flow sans connexion internet.
Pour configurer votre Reach RS3 comme base pour le drone Skydio RTK, vous aurez besoin des éléments suivants :
- Fixation du drone Skydio X10 RTK avec VT300-L ou VT300-Z
- Contrôleur Skydio X10
- Reach RS3 comme base
- Un smartphone ou une tablette avec l'application Emlid Flow installée
- Connexion internet sur les deux appareils si vous utilisez Emlid Caster
- Compte Emlid pour accéder à Emlid Caster
La liste des packages de capteurs peut changer lorsque Skydio ajoute plus de cardans et de capteurs. Pour les informations les plus précises, consultez les dernières recommandations.
Configurer Reach RS3 comme base en utilisant Local NTRIP
Cette configuration ne fonctionnera pour votre drone Skydio RTK que s'il supporte une connexion Wi-Fi.
Pour configurer votre Reach comme base pour le drone Skydio RTK en utilisant l'option Local NTRIP dans Emlid Flow, suivez les étapes ci-dessous :
-
Placez votre Reach sur le trépied et assurez-lui une vue dégagée du ciel.
astuceApprenez-en plus sur le placement et la configuration de la base dans les guides Placement et Choisir la méthode de configuration de la base.
-
Ouvrez Emlid Flow et connectez-vous à votre Reach.
-
Appuyez sur Base output et sélectionnez l'option Local NTRIP. Vous verrez les identifiants pour votre drone.
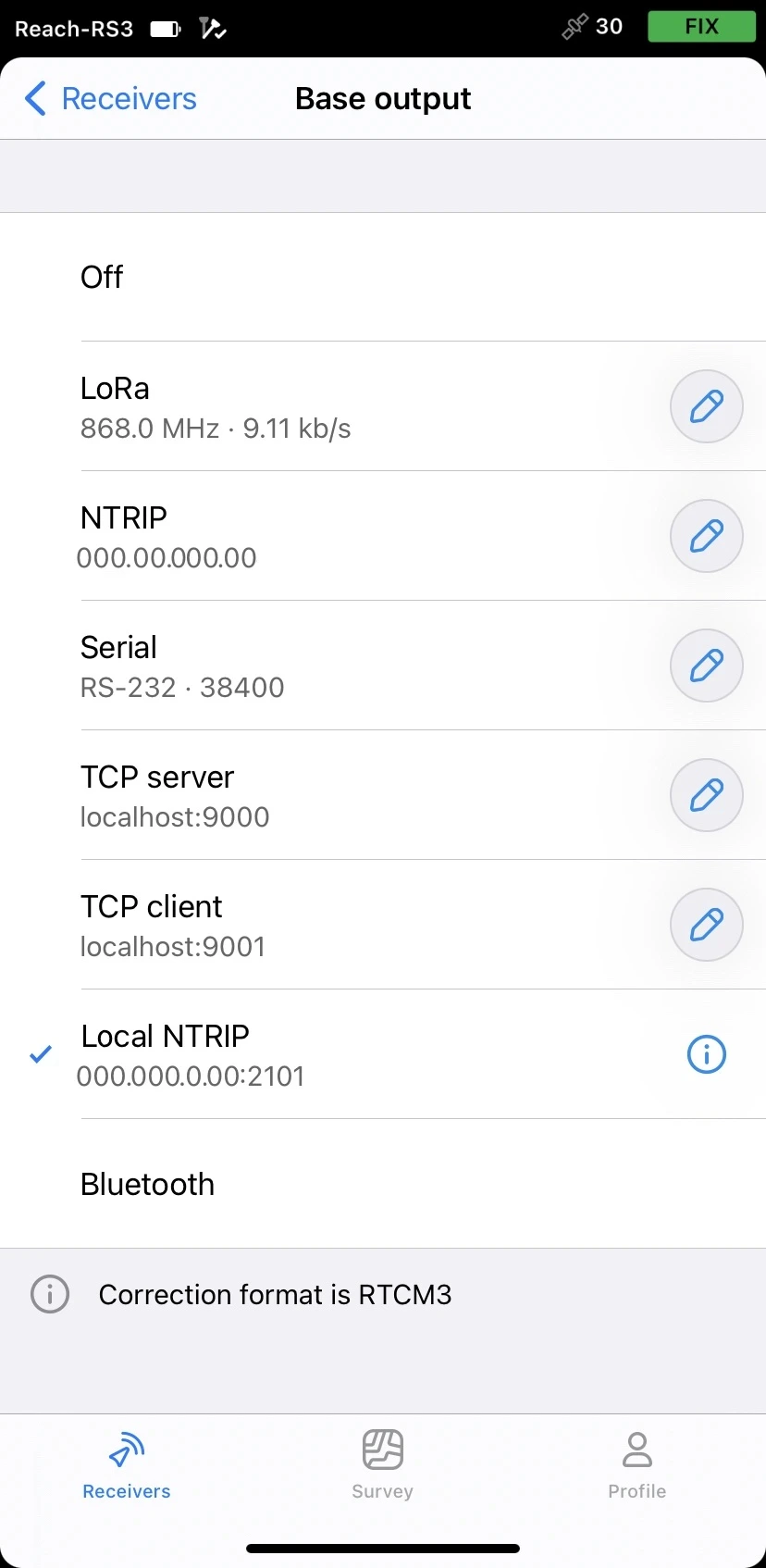

Maintenant, vous devez connecter le contrôleur de votre drone au point d'accès de Reach et entrer les identifiants que vous avez obtenus pour établir la transmission des corrections.
Configurer Reach RS3 comme base en utilisant Emlid Caster
Cette configuration ne fonctionnera pour votre drone Skydio RTK que s'il supporte une connexion Internet.
Pour configurer votre Reach RS3 comme base pour le drone Skydio RTK en utilisant Emlid Caster, vous devez accéder à Emlid Caster et obtenir les identifiants NTRIP. Suivez les étapes ci-dessous :
-
Accédez à Emlid Caster et obtenez les identifiants NTRIP pour la base et le rover.
astucePour en savoir plus, consultez la documentation d'Emlid Caster.
-
Placez votre Reach sur le trépied et assurez-lui une vue dégagée du ciel.
astuceApprenez-en plus sur le placement et la configuration de la base dans les guides Placement et Choisir la méthode de configuration de la base.
-
Ouvrez Emlid Flow et connectez-vous à votre récepteur.
-
Connectez votre Reach à internet.
astucePour en savoir plus sur la connexion de votre Reach RS3 à Internet, consultez les guides suivants :
-
Sur l'écran *Receivers (Récepteurs), appuyez sur Base output (Sortie de base) et sélectionnez l'option NTRIP.
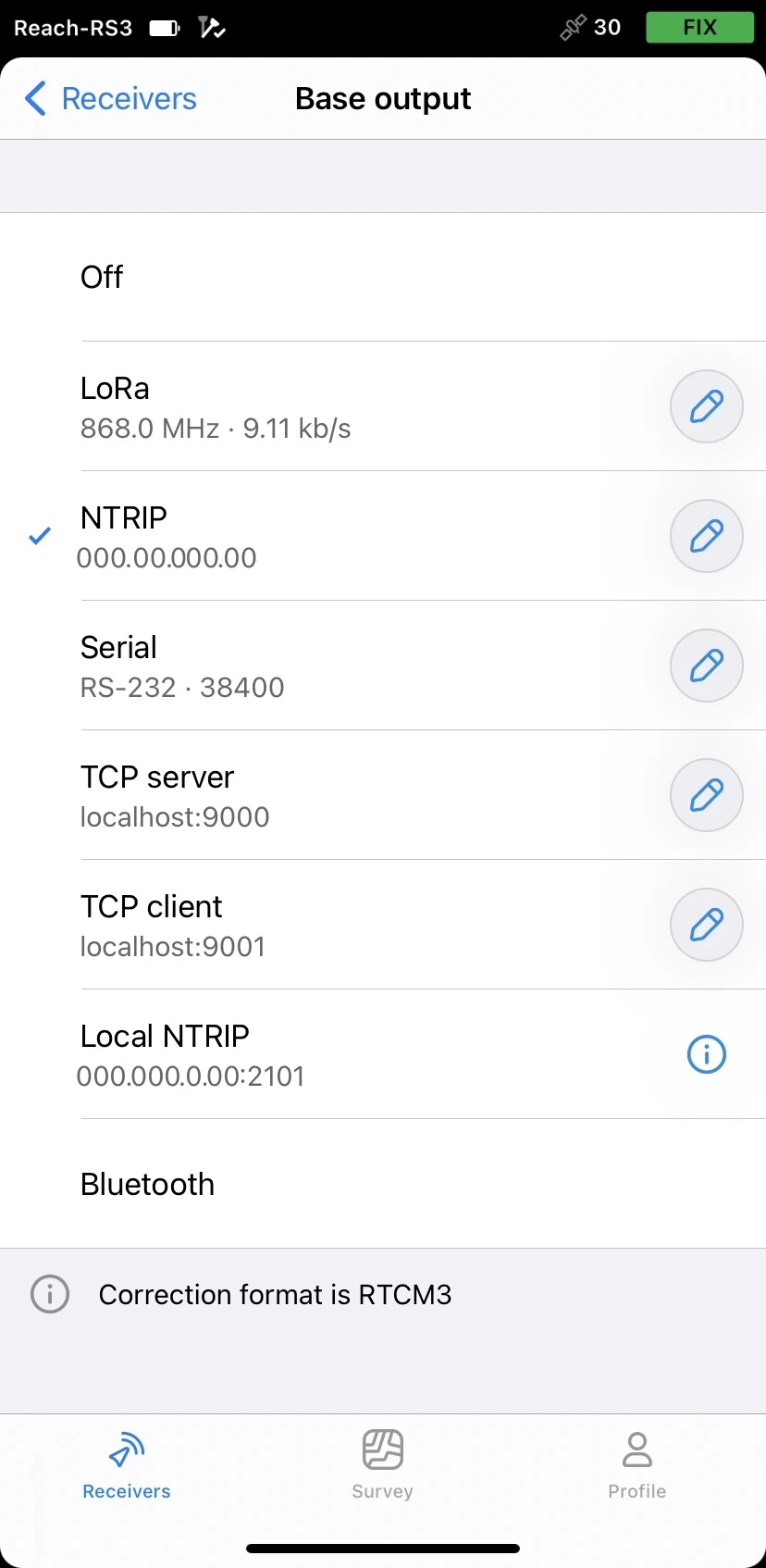
-
Appuyez sur le bouton Edit (Modifier) et insérez les identifiants NTRIP pour la base que vous avez obtenus précédemment :
-
Adresse : l'URL ou l'adresse IP du diffuseur NTRIP.
-
Port : le port utilisé pour se connecter au diffuseur. La valeur par défaut est généralement 2101, sauf si votre fournisseur spécifie un port différent.
-
Nom d'utilisateur : le nom d'utilisateur utilisé pour s'authentifier auprès du service NTRIP. Dans certains cas, il peut s'agir de votre nom ou de votre adresse e-mail.
-
Mot de passe : le mot de passe associé au nom d'utilisateur.
-
Point de montage : le nom du flux de corrections fourni par le service NTRIP.
astucePour savoir quel point de montage vous convient le mieux, consultez le site Web de votre fournisseur NTRIP. En général, des distances plus courtes par rapport à la station de référence améliorent les performances RTK.

remarquePour assurer une transmission correcte des corrections, vérifiez les identifiants que vous avez entrés.
-
Maintenant, vous devez entrer les identifiants du rover sur le contrôleur de votre drone pour établir une transmission de corrections.
Configurer le drone Skydio comme rover
Pour configurer le drone Skydio en utilisant le contrôleur X10, suivez les étapes ci-dessous :
-
Installez la fixation RTK/PPK sur votre drone. En savoir plus sur le processus dans la documentation Skydio.
-
Allumez votre drone et le contrôleur.
-
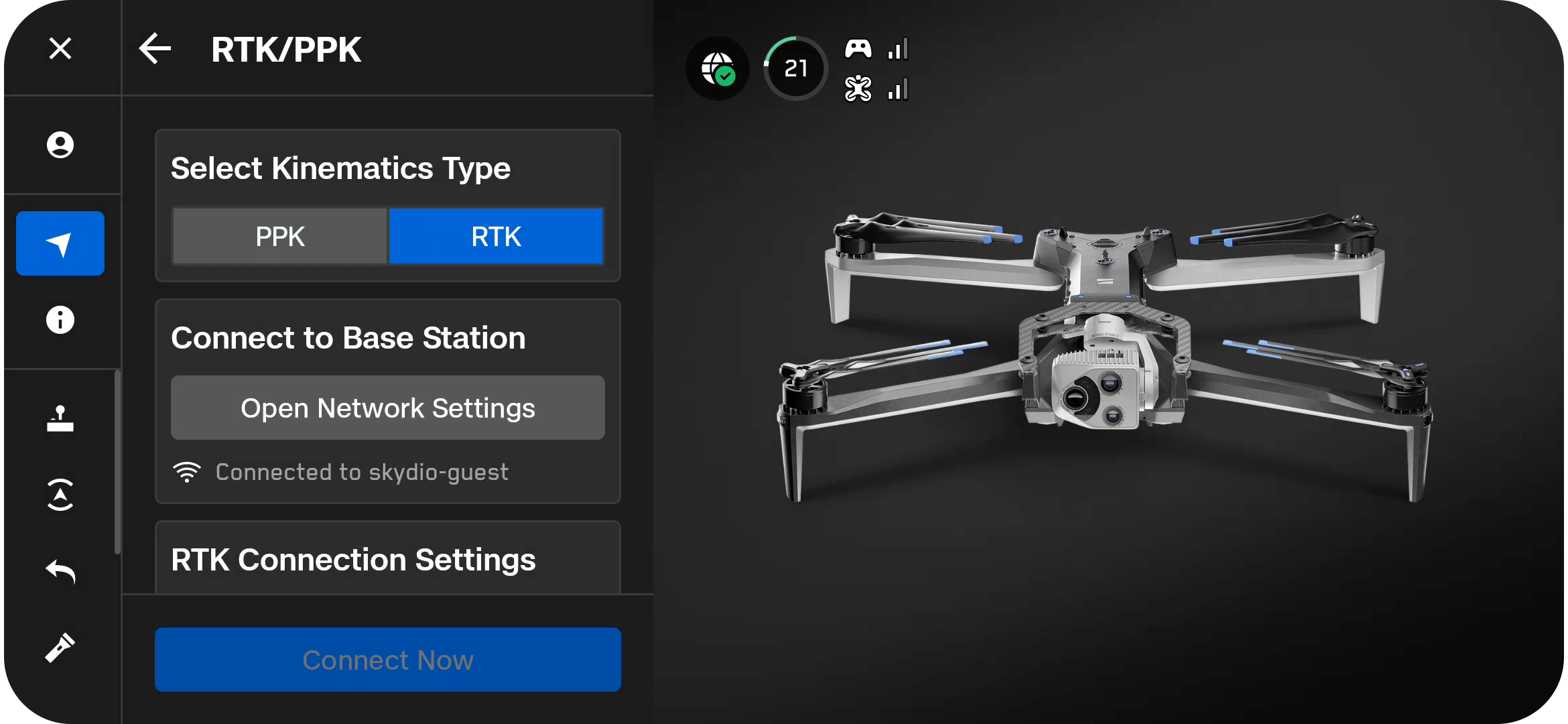
Une fois la fixation connectée, sélectionnez Set Up RTK (Configurer RTK) dans le contrôleur.

-
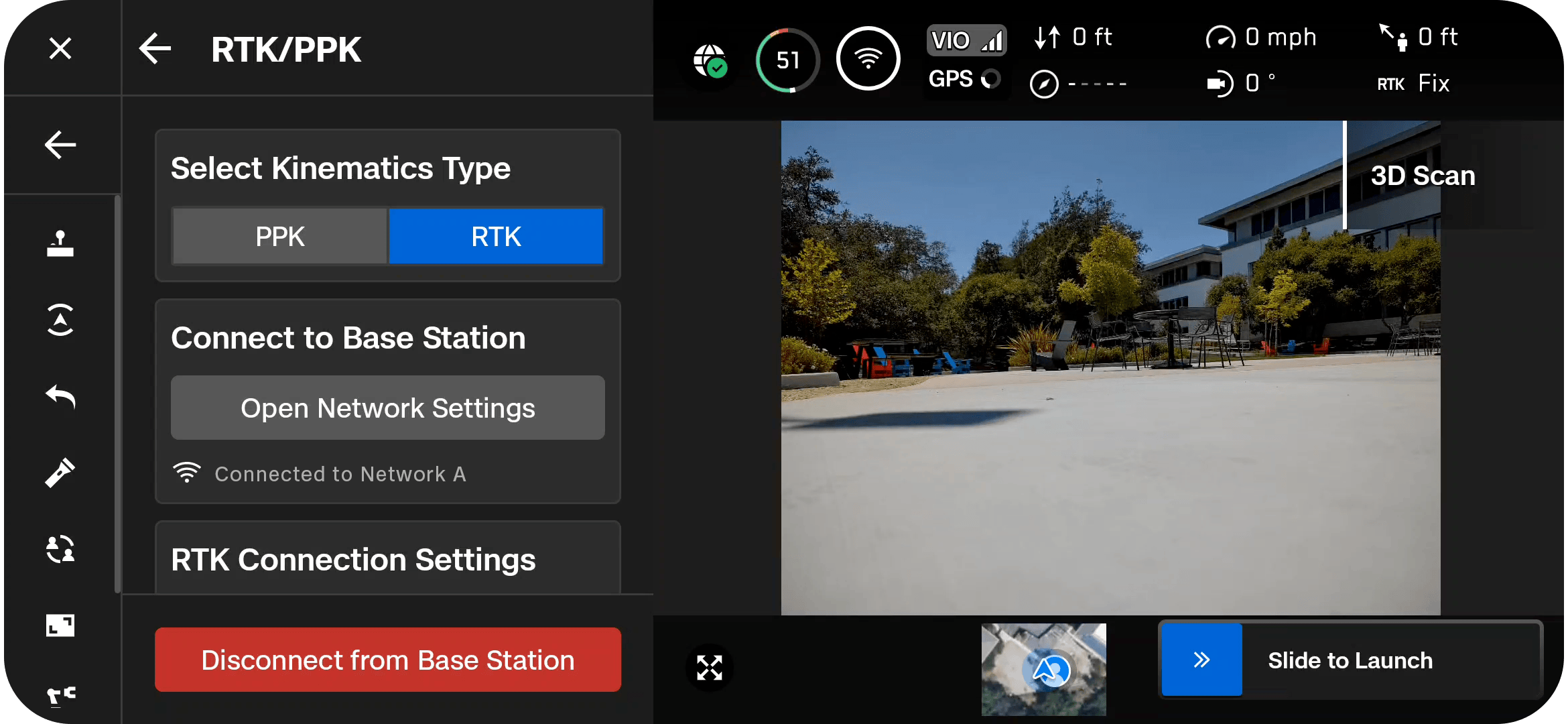
Sous Connect to Base Station (Connexion à une station de base), appuyez sur Open Network Settings (Ouvrir les paramètres réseau) pour vous connecter à votre station de base.
-
Entrez les identifiants que vous avez obtenus en accédant à Emlid Caster ou en activant l'option Local NTRIP (NTRIP local) dans Emlid Flow :
- Hôte NTRIP : l'URL ou l'adresse IP du diffuseur NTRIP.
- Port : le port utilisé pour se connecter au diffuseur. La valeur par défaut est généralement 2101, sauf si votre fournisseur spécifie un port différent.
- Compte : le nom d'utilisateur utilisé pour s'authentifier auprès du service NTRIP. Dans certains cas, il peut s'agir de votre nom ou de votre adresse e-mail.
- Mot de passe : le mot de passe associé au nom d'utilisateur.
- Point de montage : le nom du flux de corrections fourni par le service NTRIP.
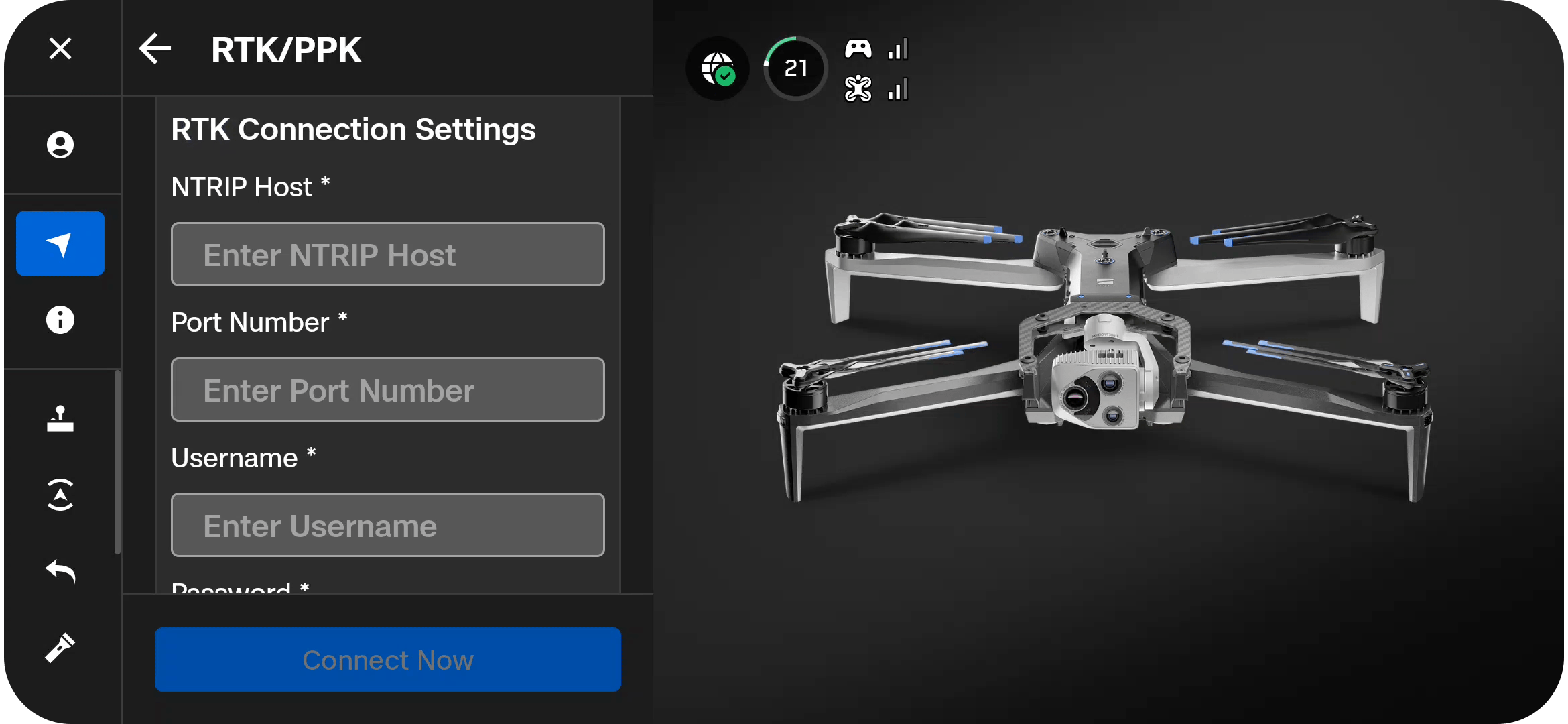
Assurez-vous d'utiliser les identifiants pour le rover.
- Appuyez sur Connect Now (Se connecter maintenant). Une fois connecté, l'option Disconnect from Base Station (Se déconnecter de la station de base) apparaîtra, et l'indicateur de télémétrie dans le coin supérieur droit affichera l'état de la solution. Un statut FIX est requis pour procéder au vol.

Effectuer le vol
Une fois la communication établie entre votre Reach RS3 et le drone Skydio, vous pouvez procéder à la configuration de la mission de vol et effectuer le vol.
En savoir plus sur la configuration de la mission de vol en suivant la section Compléter une capture de carte dans la documentation Skydio.