Integración del dron Skydio X10 RTK y la base Reach RS3
Esta guía muestra cómo configurar su Reach RS3 como base para los drones Skydio X10 RTK para geoetiquetar imágenes de drones para su posterior cartografía en software de fotogrametría.
Puede obtener más información sobre RTK en el artículo Cómo funciona RTK.
Resumen
Los drones Skydio X10 RTK utilizan NTRIP para recibir correcciones, lo que permite utilizar Reach RS3 como estación base. Reach puede enviar correcciones NTRIP mediante Emlid Caster a través de Internet o utilizando la opción NTRIP local en Emlid Flow sin conexión a Internet.
Para configurar su Reach RS3 como base para el dron Skydio RTK, necesitará lo siguiente:
- Accesorio para drones Skydio X10 RTK con VT300-L o VT300-Z
- Controlador Skydio X10
- Reach RS3 como base
- Un smartphone o una tableta con la aplicación Emlid Flow instalada
- Conexión a Internet en ambos dispositivos si utiliza Emlid Caster
- Cuenta Emlid para acceder a Emlid Caster
La lista de paquetes de sensores puede cambiar a medida que Skydio añada más cardanes y sensores. Para obtener la información más exacta, consulte las últimas recomendaciones.
Configurar Reach RS3 como base utilizando NTRIP Local
Esta configuración solo funcionará para su drone Skydio RTK si admite una conexión Wi-Fi.
Para configurar su Reach como base para el dron Skydio RTK utilizando la opción NTRIP Local en Emlid Flow, siga estos pasos:
-
Coloque su Reach en el trípode con una vista despejada del cielo.
tipObtenga más información sobre la colocación y configuración de la base en las guías Colocación y Elegir el método de configuración de la base.
-
Abra Emlid Flow y conéctese a su Reach.
-
Pulse Base Output (Salida de la base) y seleccione la opción Local NTRIP (NTRIP local). Verá las credenciales de su dron.
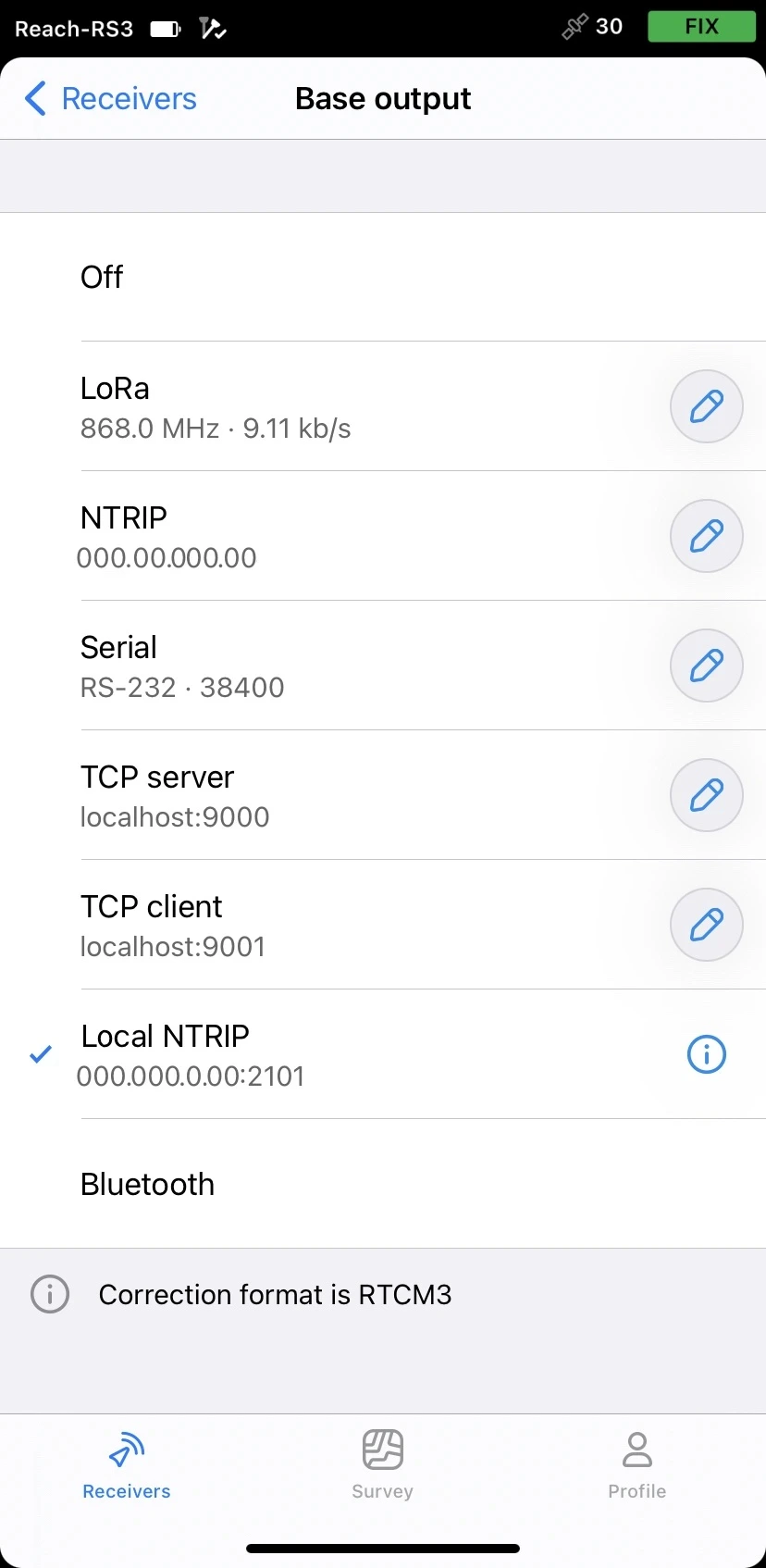

Ahora, tiene que conectar el controlador de su dron al punto de acceso de Reach e introducir las credenciales que obtuvo para establecer la transmisión de correcciones.
Configurar Reach RS3 como base usando Emlid Caster
Esta configuración solo funcionará para su drone Skydio RTK si admite una conexión a Internet.
Para configurar su Reach RS3 como base para el dron Skydio RTK usando Emlid Caster, necesita acceder a Emlid Caster y obtener las credenciales de NTRIP. Siga los pasos que se indican a continuación:
-
Acceda a Emlid Caster y consiga las credenciales de NTRIP tanto para la base como para el rover.
tipPara obtener más información, consulte la [documentación] de Emlid Caster (https://docs.emlid.com/emlid-caster/getting-started-emlid-caster).
-
Coloque su Reach en el trípode con una vista despejada del cielo.
tipObtenga más información sobre la colocación y configuración de la base en las guías Colocación y Elegir el método de configuración de la base.
-
Abra Emlid Flow y conéctese a su receptor.
-
Conecte su Reach a Internet.
tipPara obtener más información sobre cómo conectar su Reach RS3 a Internet, consulte las siguientes guías:
-
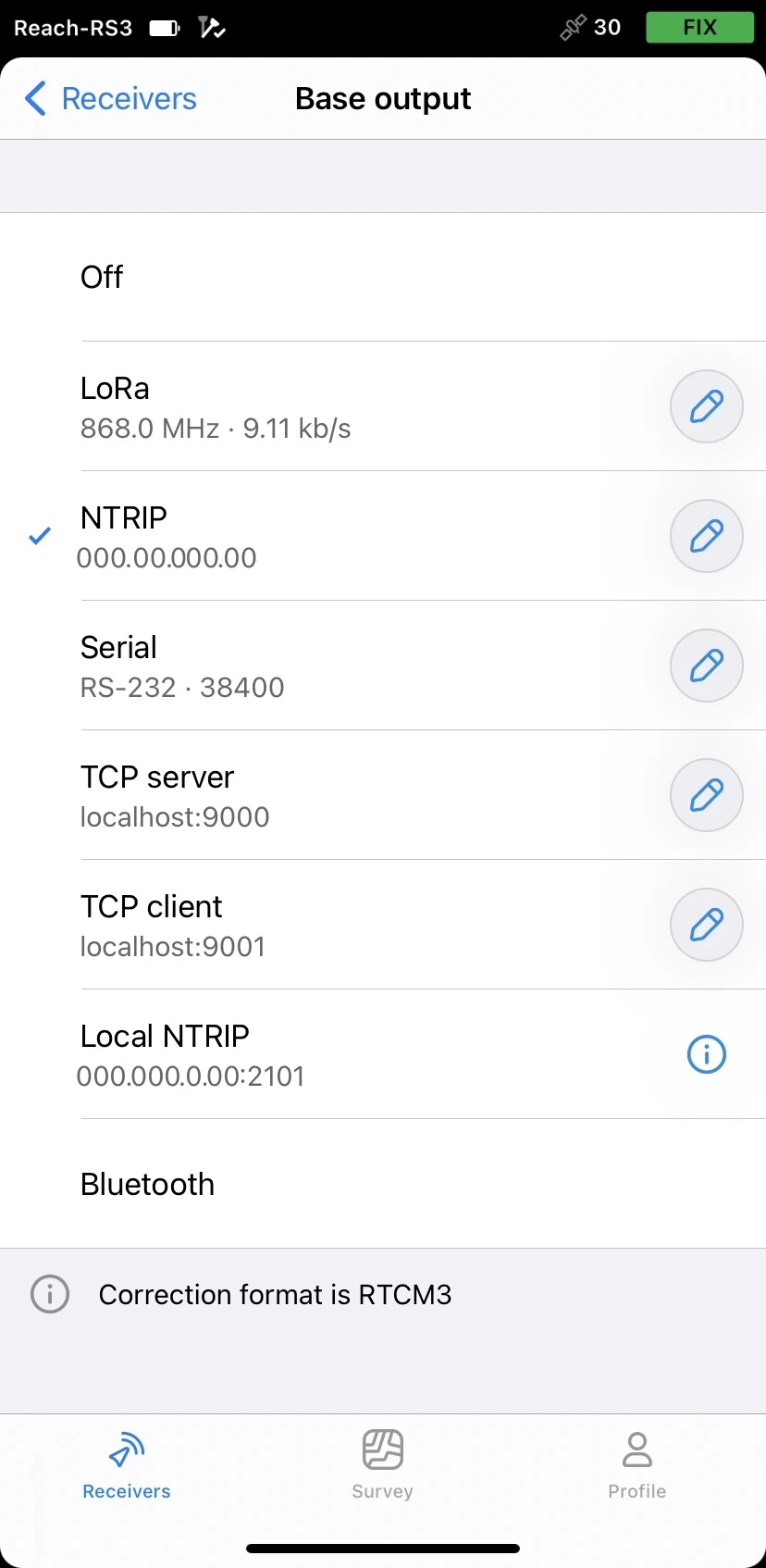
En la pantalla Receptores, pulse Salida de la base y seleccione la opción NTRIP.
-
Pulse el botón Edit (Editar) e introduzca las credenciales de NTRIP de la base que obtuvo anteriormente:
-
Dirección: la URL o la dirección IP del caster NTRIP.
-
Puerto: el puerto utilizado para conectarse al emisor. El valor predeterminado suele ser 2101, a menos que su proveedor especifique un puerto diferente.
-
Nombre de usuario: el nombre de usuario que se utiliza para autenticarse en el servicio NTRIP. En algunos casos, puede tratarse de su nombre o su dirección de correo electrónico.
-
Contraseña: la contraseña asociada al nombre de usuario.
-
Punto de montaje: el nombre del flujo de corrección proporcionado por el servicio NTRIP.
tipPara saber qué punto de montaje le conviene más, consulte el sitio web de su proveedor NTRIP. En general, las distancias más cortas a la estación de referencia mejoran el rendimiento de RTK.

notePara garantizar el éxito de la transmisión de las correcciones, vuelva a comprobar las credenciales introducidas.
-
Ahora, tiene que introducir las credenciales del rover en el controlador de su dron para establecer una transmisión de correcciones.
Configurar el dron Skydio como rover
Para configurar el dron Skydio utilizando el controlador X10, siga los pasos que se indican a continuación:
-
Instale el accesorio RTK/PPK en su dron. Obtenga más información sobre el proceso en la documentación de Skydio.
-
Encienda el dron y el controlador.
-
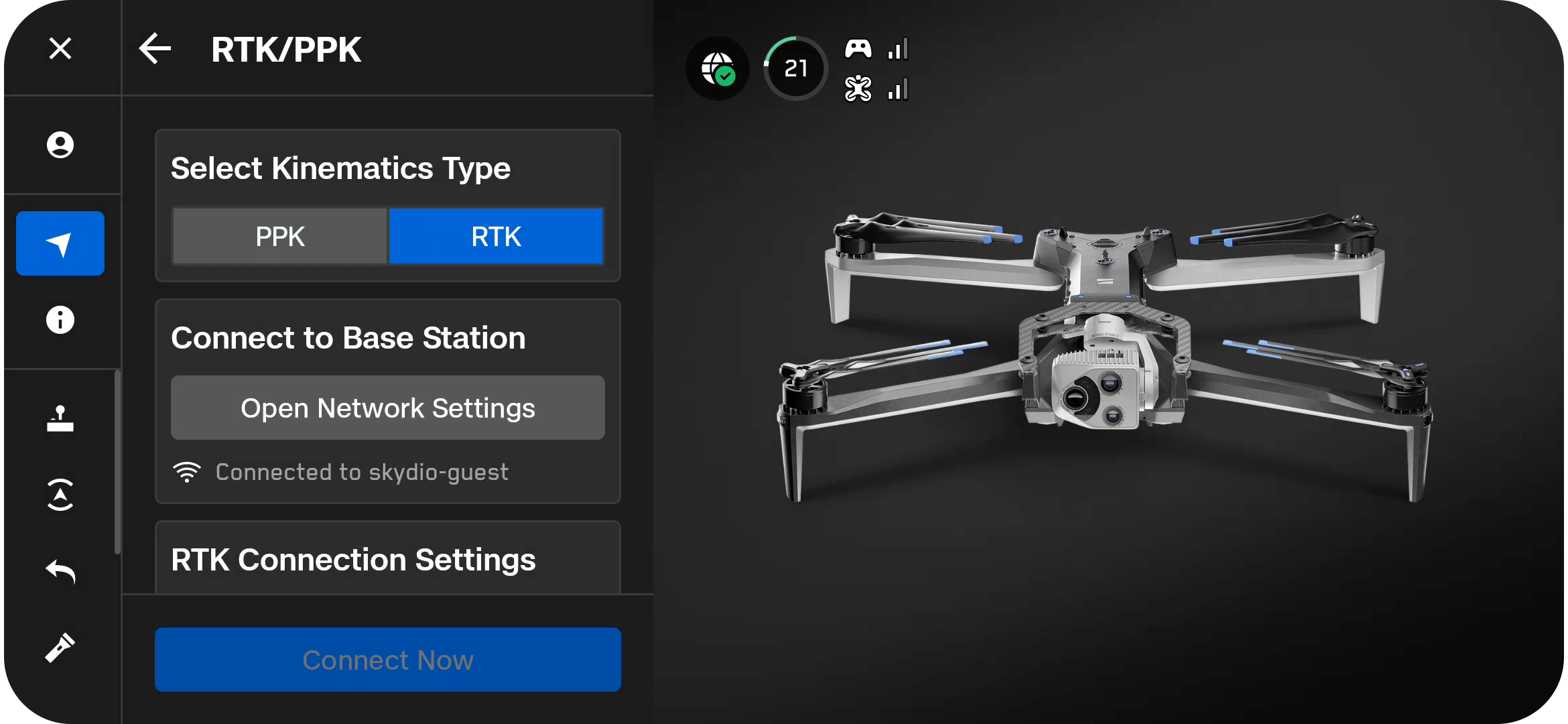
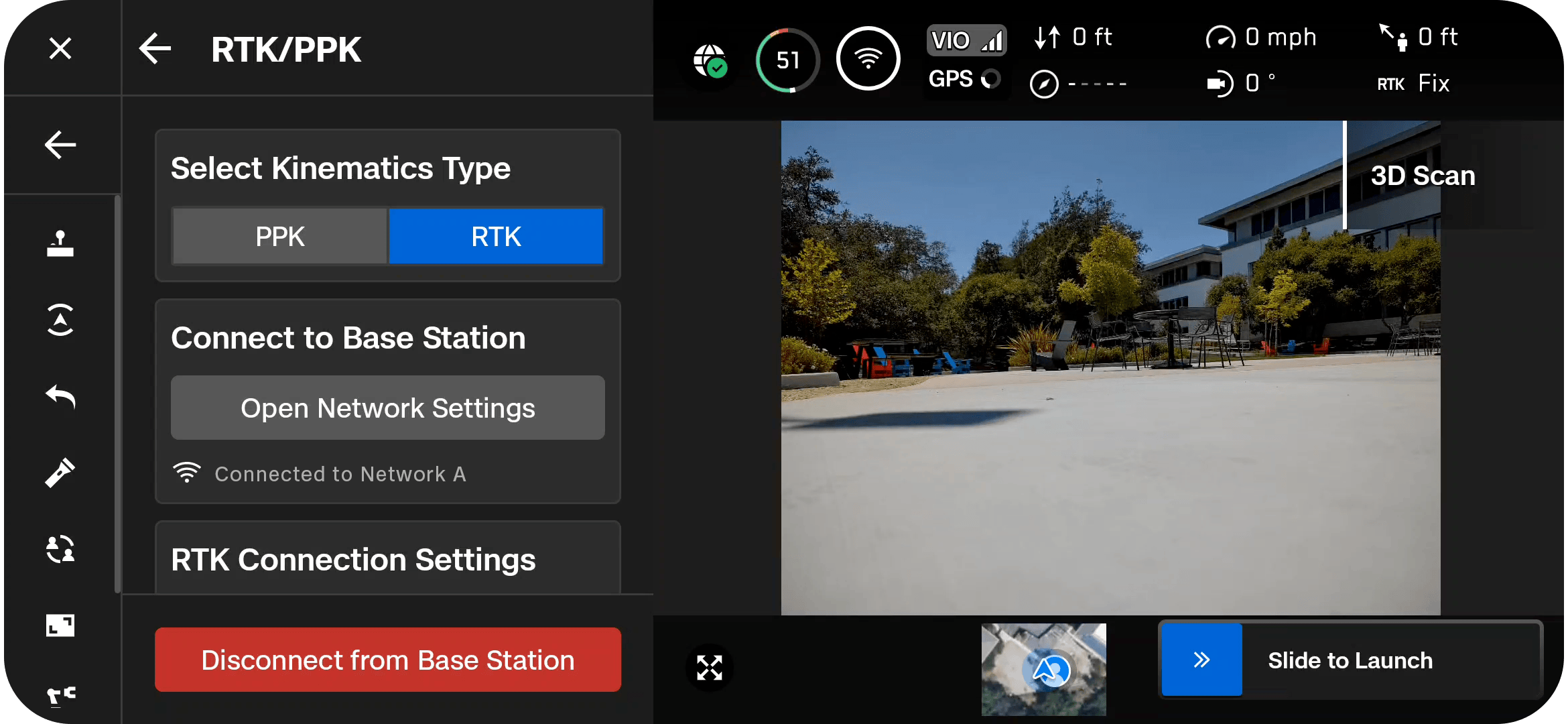
Una vez conectado el accesorio, seleccione Set Up RTK (Configurar RTK) en el controlador.

-
En Connect to Base Station (Conectarse a la estación base), pulse Open Network Settings (Abrir configuración de red) para conectarse a su estación base.
-
Introduzca las credenciales que obtuvo al acceder a Emlid Caster o al activar la opción Local NTRIP (NTRIP local) en Emlid Flow:
- Servidor NTRIP: la URL o la dirección IP del servidor NTRIP.
- Puerto: el puerto utilizado para conectarse al emisor. El valor predeterminado suele ser 2101, a menos que su proveedor especifique un puerto diferente.
- Cuenta: el nombre de usuario que se utiliza para autenticarse en el servicio NTRIP. En algunos casos, puede tratarse de su nombre o su dirección de correo electrónico.
- Contraseña: la contraseña asociada al nombre de usuario.
- Punto de montaje: el nombre del flujo de corrección proporcionado por el servicio NTRIP.
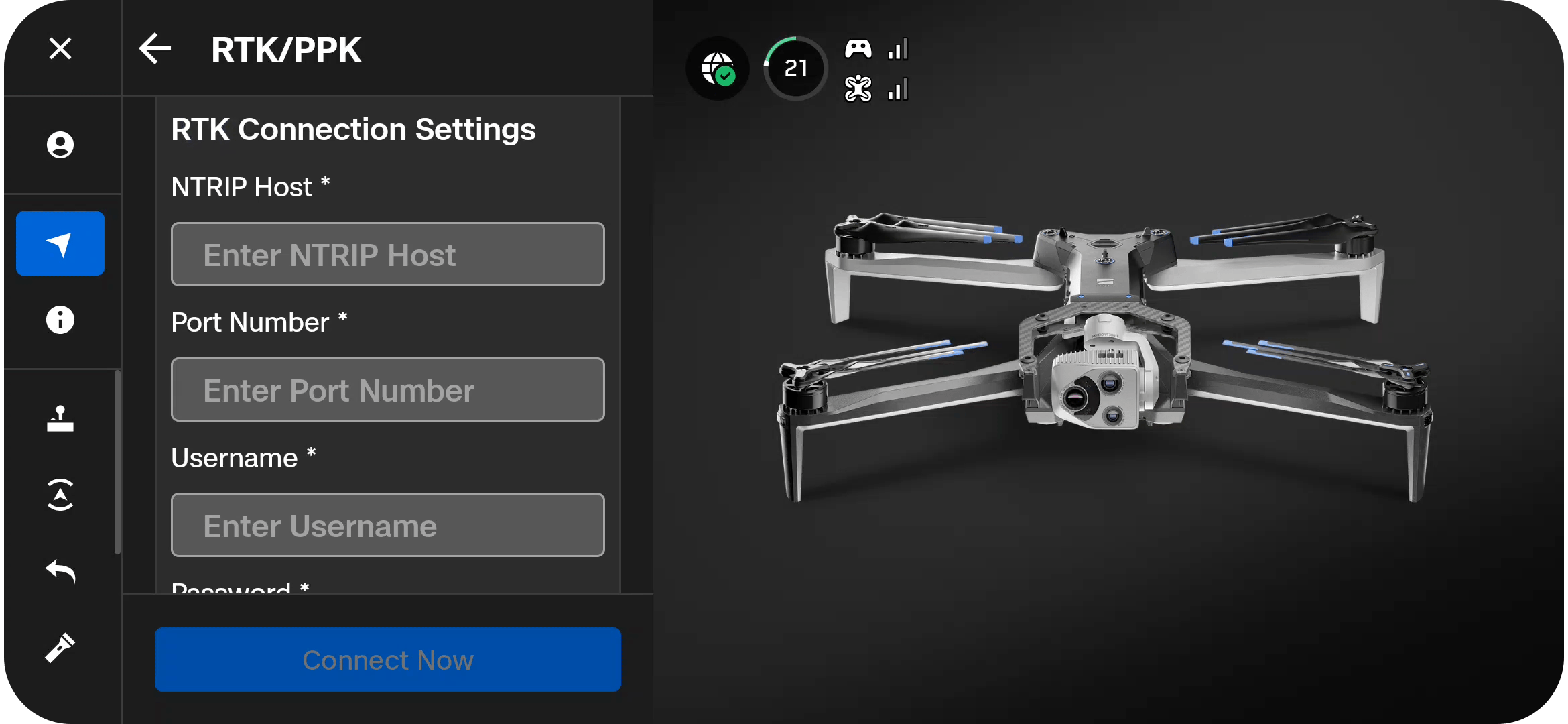
Asegúrese de que usa las credenciales para el rover.
- Pulse Connect Now (Conectar ahora). Una vez conectado, aparecerá la opción Disconnect from Base Station (Desconectar de la estación base), y el indicador de telemetría de la esquina superior derecha mostrará el estado de la solución. Se requiere un estado FIX para proceder con el vuelo.

Realizar vuelo
Una vez establecida la comunicación entre su Reach RS3 y el dron Skydio, puede proceder a configurar la misión de vuelo y realizar el vuelo.
Obtenga más información sobre la configuración de misiones de vuelo en la sección Completar una captura de mapa de la documentación de Skydio.