Integração do drone Skydio X10 RTK e da base Reach RS3
Este guia mostra como configurar seu Reach RS3 como base para os drones Skydio X10 RTK para georeferenciar imagens de drones para mapeamento posterior em software de fotogrametria.
Saiba mais sobre o RTK no artigo [How RTK works] (/rtk-quickstart/rtk-introduction).
Visão geral
Os drones Skydio X10 RTK usam NTRIP para receber correções, o que permite usar o Reach RS3 como estação base. O Reach pode enviar correções NTRIP através do Emlid Caster através da Internet ou utilizando a opção Local NTRIP no Emlid Flow sem conexão à Internet.
Para configurar o Reach RS3 como uma base para o drone Skydio RTK, você precisará do seguinte:
- Acessório para drone Skydio X10 RTK com VT300-L ou VT300-Z
- Controlador Skydio X10
- Reach RS3 como base
- Um smartphone ou tablet com a aplicação Emlid Flow instalada
- Conexão à Internet em ambos os dispositivos se utilizar o Emlid Caster
- Conta Emlid para acessar o Emlid Caster
A lista de pacotes de sensores pode mudar à medida que a Skydio adiciona mais gimbals e sensores. Para obter as informações mais precisas, verifique as [recomendações mais recentes] (https://support.skydio.com/hc/en-us/articles/27959034202523-Getting-Started-with-the-X10-RTK-attachment).
Configurar o Reach RS3 como base usando o NTRIP local
Essa configuração só funcionará com seu drone Skydio RTK se ele for compatível com uma conexão Wi-Fi.
Para configurar seu Reach como uma base para o drone Skydio RTK usando a opção Local NTRIP no Emlid Flow, siga os passos abaixo:
-
Coloque o seu Reach no tripé e garanta que ele tenha uma visão limpa do céu.
dicaSaiba mais sobre a colocação e a configuração da base nos guias Colocação e Escolhendo um método de colocação da base.
-
Abra o Emlid Flow e conecte-se ao seu Reach.
-
Toque em Base output (Saída de correção) e selecione a opção Local NTRIP (NTRIP local). Você verá as credenciais do seu drone.
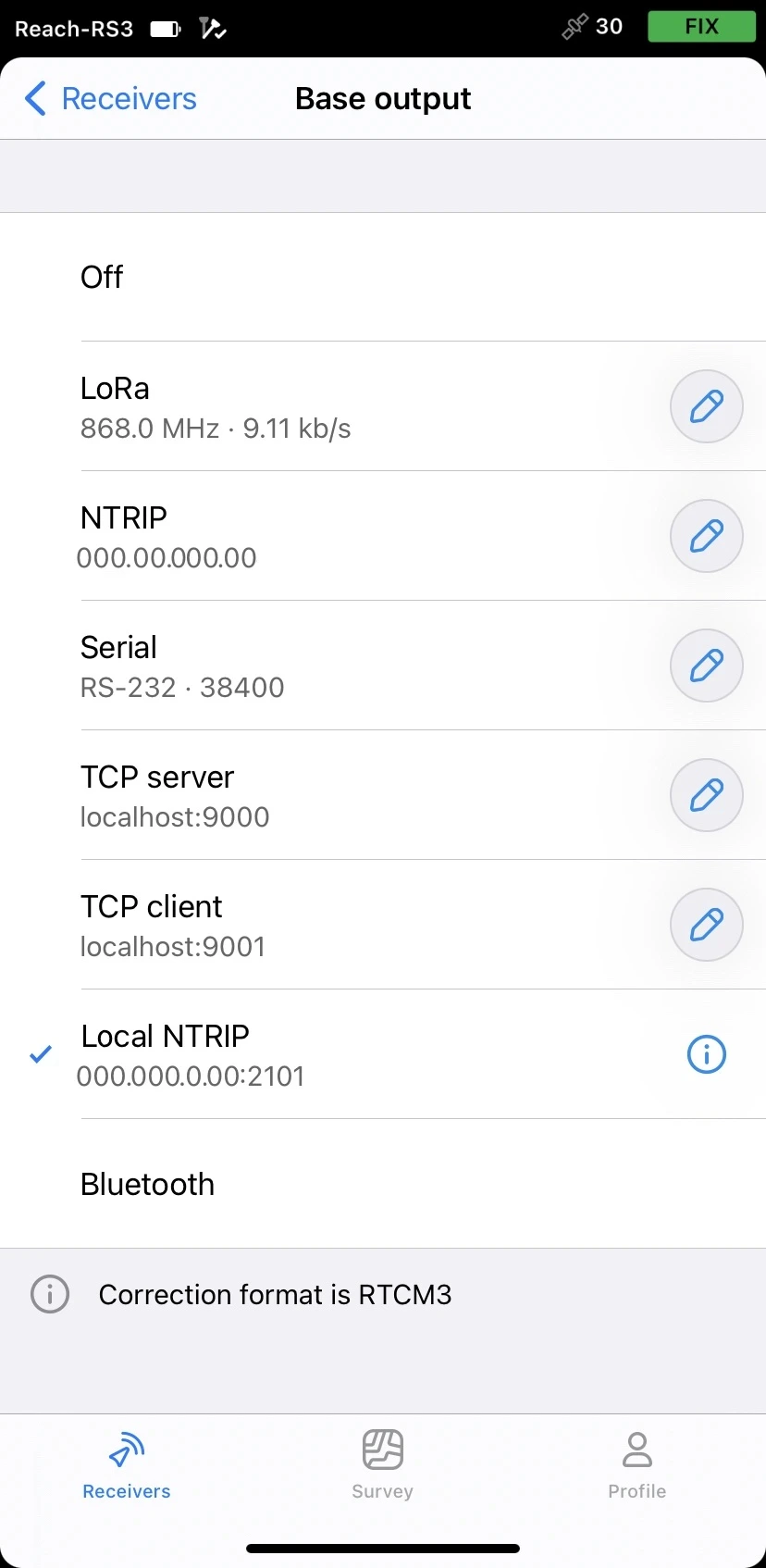

Agora, você precisa conectar o controlador do drone ao ponto de acesso do Reach e inserir as credenciais obtidas para estabelecer a transmissão de correções.
Configurar o Reach RS3 como base usando o Emlid Caster
Essa configuração só funcionará com seu drone Skydio RTK se ele suportar uma conexão com a Internet.
Para configurar o Reach RS3 como base para o drone Skydio RTK usando o Emlid Caster, é necessário acessar o Emlid Caster e obter as credenciais NTRIP. Siga os passos abaixo:
-
Acesse Emlid Caster e obtenha as credenciais NTRIP para a base e o rover.
dicaPara saber mais, consulte a documentação do Emlid Caster.
-
Coloque o seu Reach no tripé e garanta que ele tenha uma visão limpa do céu.
dicaSaiba mais sobre a colocação e a configuração da base nos guias Colocação e Escolhendo um método de colocação da base.
-
Abra o Emlid Flow e conecte-se ao seu receptor.
-
Conecte o seu Reach à Internet.
dicaPara saber mais sobre como conectar o Reach RS3 à Internet, consulte os guias a seguir:
-
Na tela Receptores (Receivers), toque em Saída da base (Base output) e selecione a opção NTRIP.
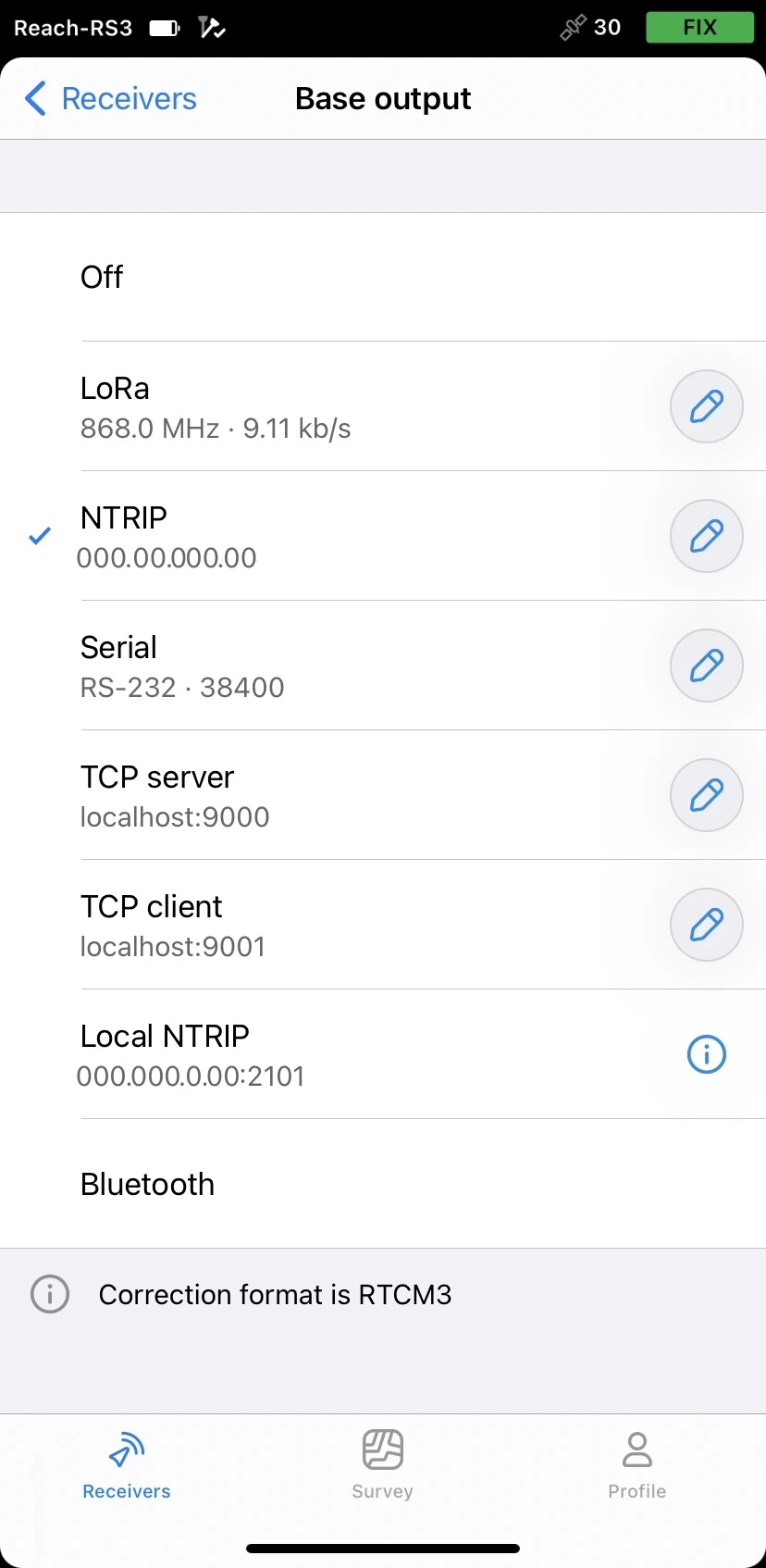
-
Toque no botão Edit (Editar) e insira as credenciais NTRIP da base que você obteve anteriormente:
-
Endereço: A URL ou o endereço IP do transmissor NTRIP.
-
Porta: A porta usada para se conectar ao transmissor. O valor padrão geralmente é 2101, a menos que seu provedor especifique uma porta diferente.
-
Nome de usuário: O nome de usuário utilizado para autenticação no serviço NTRIP. Em alguns casos, pode ser o seu nome ou endereço de e-mail.
-
Senha: A senha associada ao nome de usuário.
-
Estação de referência: O nome do fluxo de correção fornecido pelo serviço NTRIP.
dicaPara saber qual a estação de referência mais adequada, consulte o site do seu fornecedor NTRIP. Em geral, distâncias mais curtas até a estação de referência melhoram o desempenho do RTK.

notaPara garantir o sucesso da transmissão das correções, verifique novamente as credenciais introduzidas.
-
Agora, você precisa inserir as credenciais do rover no controlador do drone para estabelecer uma transmissão de correções.
Configure o drone Skydio como rover
Para configurar o drone Skydio usando o controlador X10, siga os passos abaixo:
-
Instale o acessório RTK/PPK em seu drone. Saiba mais sobre o processo na documentação do Skydio.
-
Ligue o drone e o controle.
-
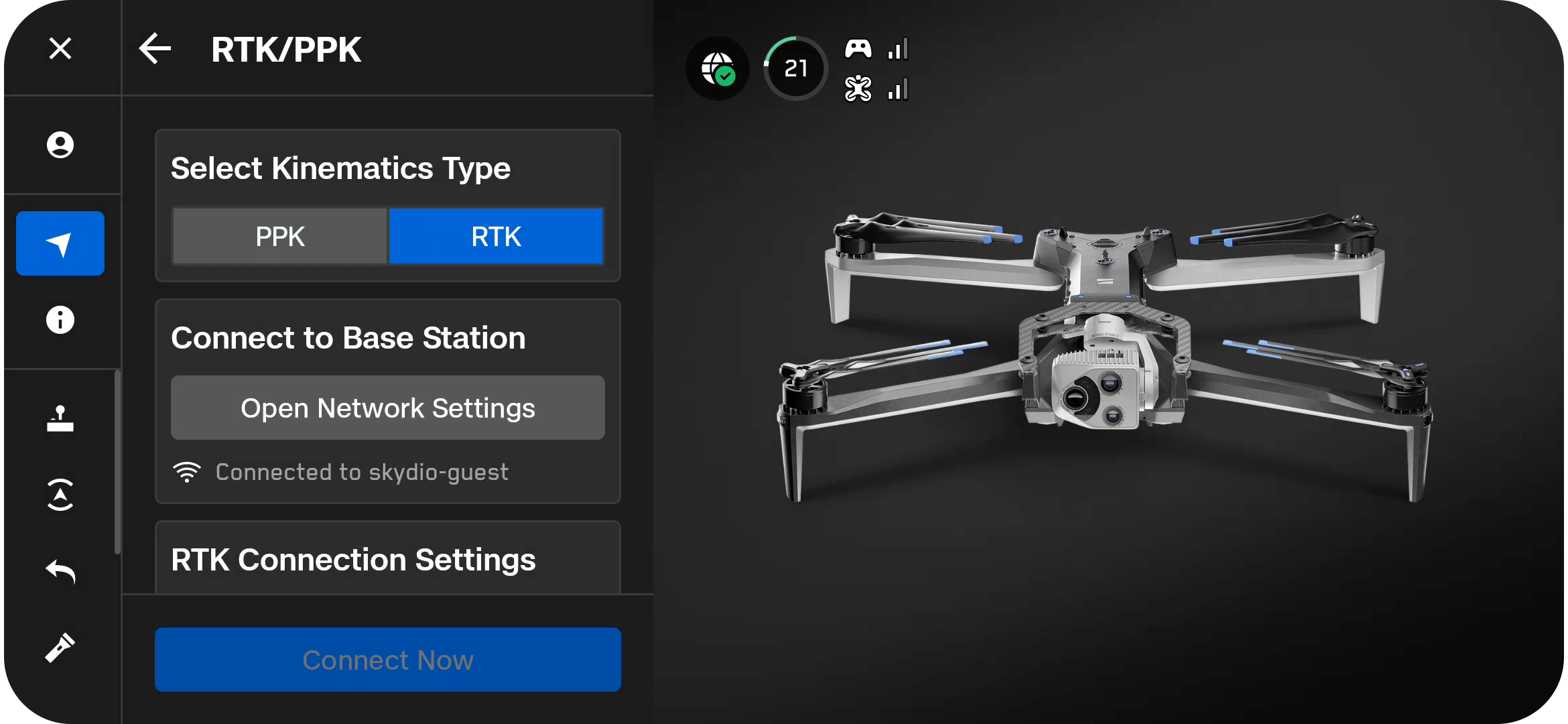
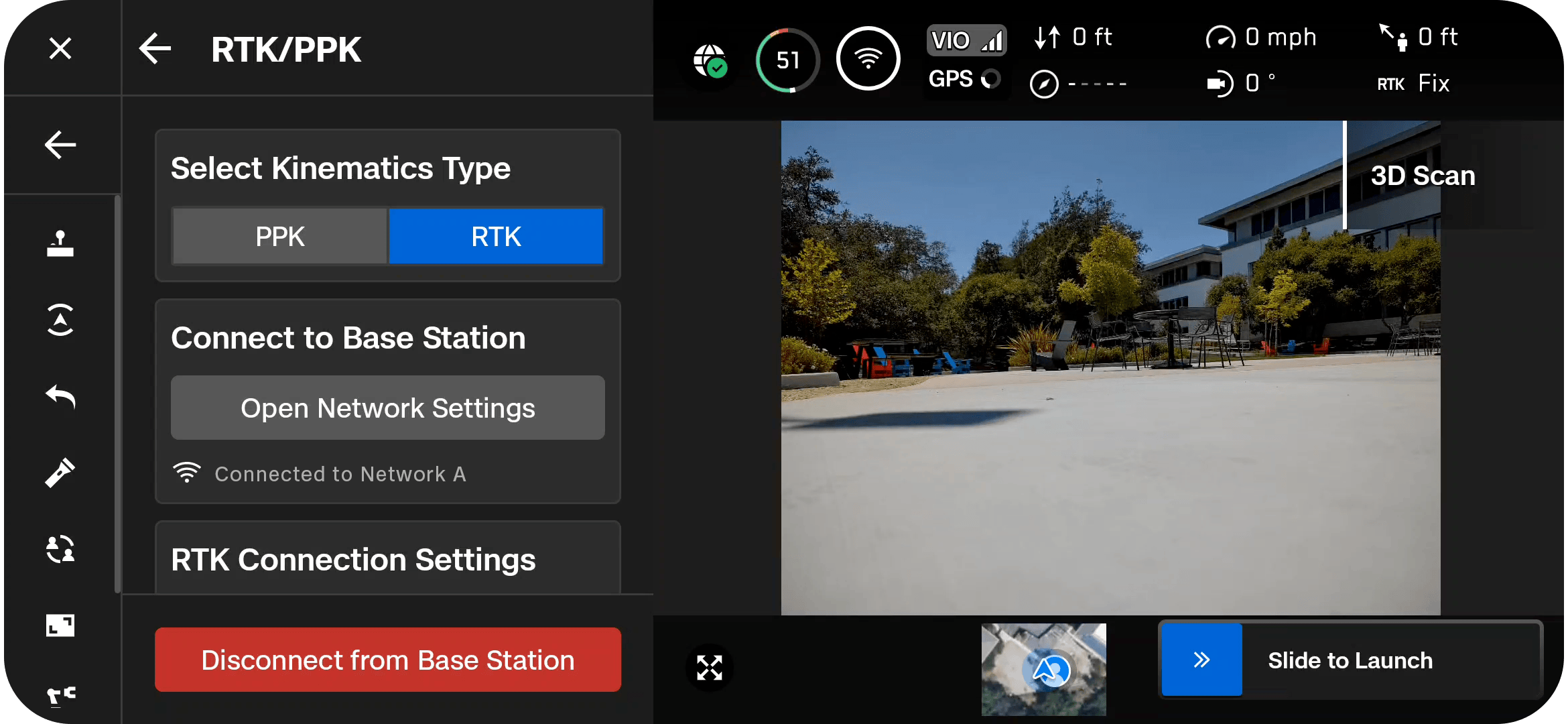
Quando o acessório estiver conectado, selecione Set Up RTK (Configurar o RTK) no controlador.

-
Em Connect to Base Station (Conectar à estação base), toque em Open Network Settings (Abrir configurações de rede) para se conectar à estação base.
-
Digite as credenciais obtidas ao acessar o Emlid Caster ou ao ativar a opção Local NTRIP (NTRIP local) no Emlid Flow:
- Host NTRIP: A URL ou o endereço IP do servidor NTRIP.
- Porta: A porta usada para se conectar ao transmissor. O valor padrão geralmente �é 2101, a menos que seu provedor especifique uma porta diferente.
- Conta: O nome de usuário utilizado para autenticação no serviço NTRIP. Em alguns casos, pode ser o seu nome ou endereço de e-mail.
- Senha: A senha associada ao nome de usuário.
- Estação de referência: O nome do fluxo de correção fornecido pelo serviço NTRIP.
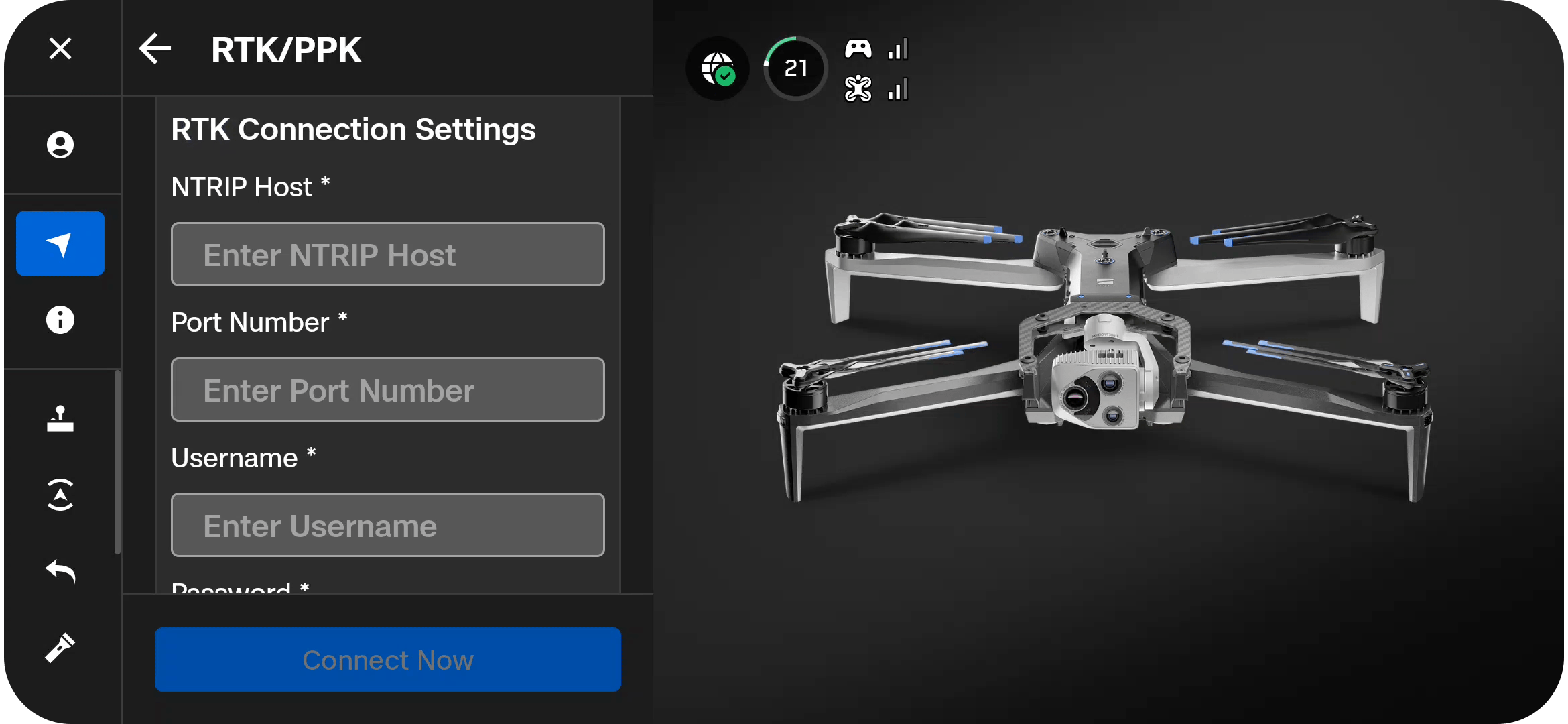
Certifique-se de estar usando as credenciais para o rover.
- Toque em Connect Now (Conectar agora). Depois de conectado, a opção Disconnect from Base Station (Desconectar da estação base) será exibida, e o indicador de telemetria no canto superior direito mostrará o status da solução. É necessário um status FIX para prosseguir com o voo.

Realizar voo
Depois que a comunicação entre o Reach RS3 e o drone Skydio for estabelecida, você poderá prosseguir com a configuração da missão de voo e a realização do voo.
Saiba mais sobre a configuração da missão de voo seguindo a seção Complete a Map Capture (Completando uma captura de mapa) na documentação do Skydio.