Integração do drone Skydio X10 RTK e da base Reach RS4 / RS4 Pro
Este guia mostra como configurar seu Reach RS4/RS4 Pro como base para os drones Skydio X10 RTK para georeferenciar imagens de drones para mapeamento posterior em software de fotogrametria.
Saiba mais sobre o RTK no artigo How RTK works.
Visão geral
Os drones Skydio X10 RTK usam NTRIP para receber correções, o que permite que você use o Reach RS4 / RS4 Pro como uma estação base. O Reach pode enviar correções NTRIP através do Emlid Caster através da Internet ou utilizando a opção Local NTRIP no Emlid Flow sem conexão à Internet.
Para configurar o Reach RS4 / RS4 Pro como base para o drone Skydio RTK, você precisará do seguinte:
* Skydio X10 RTK drone attachment with VT300-L or VT300-Z
* Skydio X10 Controller
* Reach RS4 / RS4 Pro as a base
* A smartphone or tablet with the Emlid Flow app installed
* Internet connection on both devices if you use Emlid Caster
* Emlid account to access Emlid Caster
A lista de pacotes de sensores pode mudar à medida que a Skydio adiciona mais gimbals e sensores. Para obter as informações mais precisas, verifique as recomendações mais recentes.
Configure o Reach RS4/RS4 Pro como base usando o NTRIP local
Essa configuração só funcionará com seu drone Skydio RTK se ele for compatível com uma conexão Wi-Fi.
Para configurar seu Reach como uma base para o drone Skydio RTK usando a opção Local NTRIP no Emlid Flow, siga os passos abaixo:
-
Coloque o seu Reach no tripé e garanta que ele tenha uma visão limpa do céu.
dicaSaiba mais sobre a colocação e a configuração da base nos guias Colocação e Escolhendo um método de colocação da base.
-
Abra o Emlid Flow e conecte-se ao seu Reach.
-
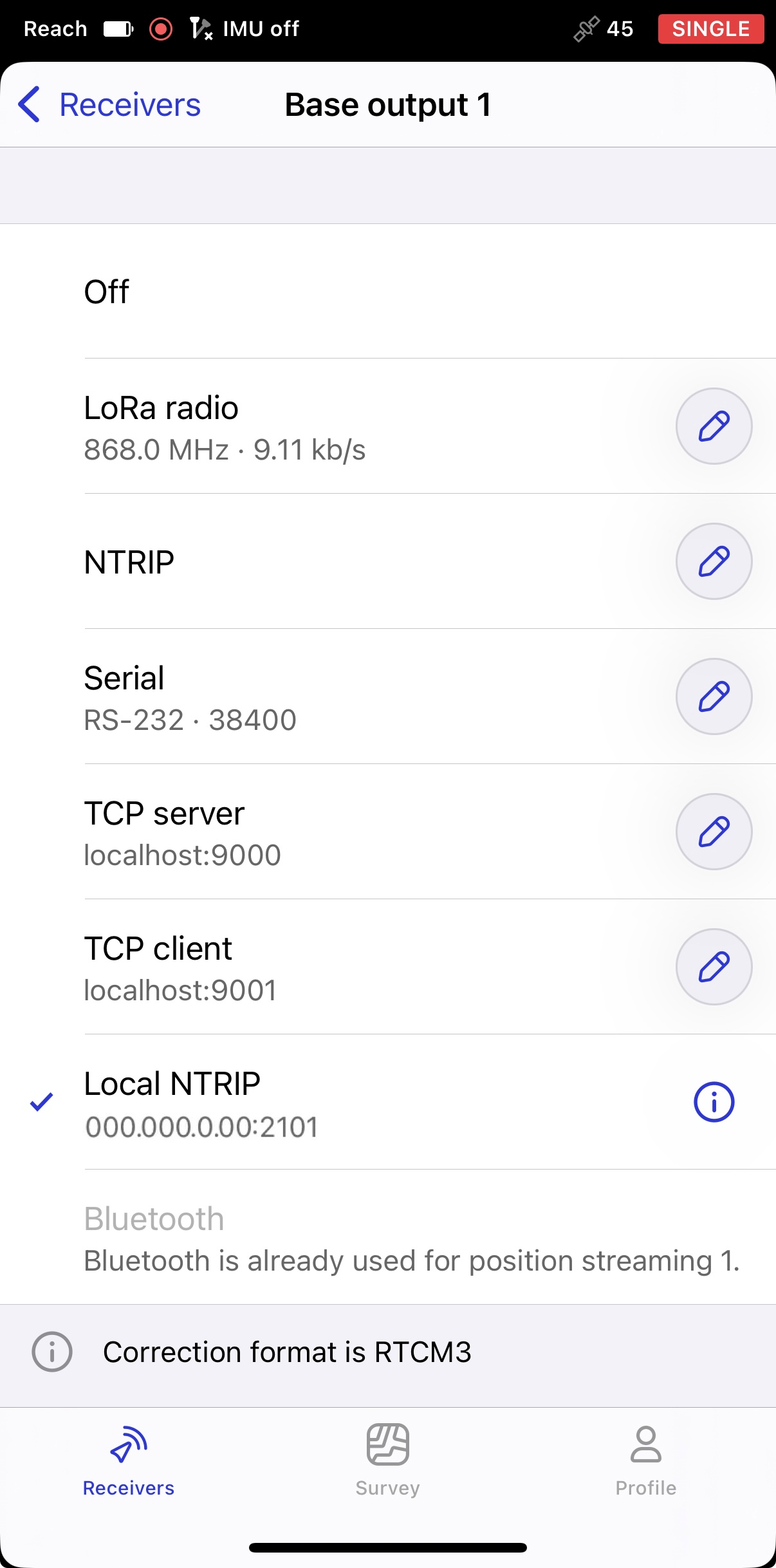
Toque em Base output (Saída de correção) e selecione a opção Local NTRIP (NTRIP local). Você verá as credenciais do seu drone.
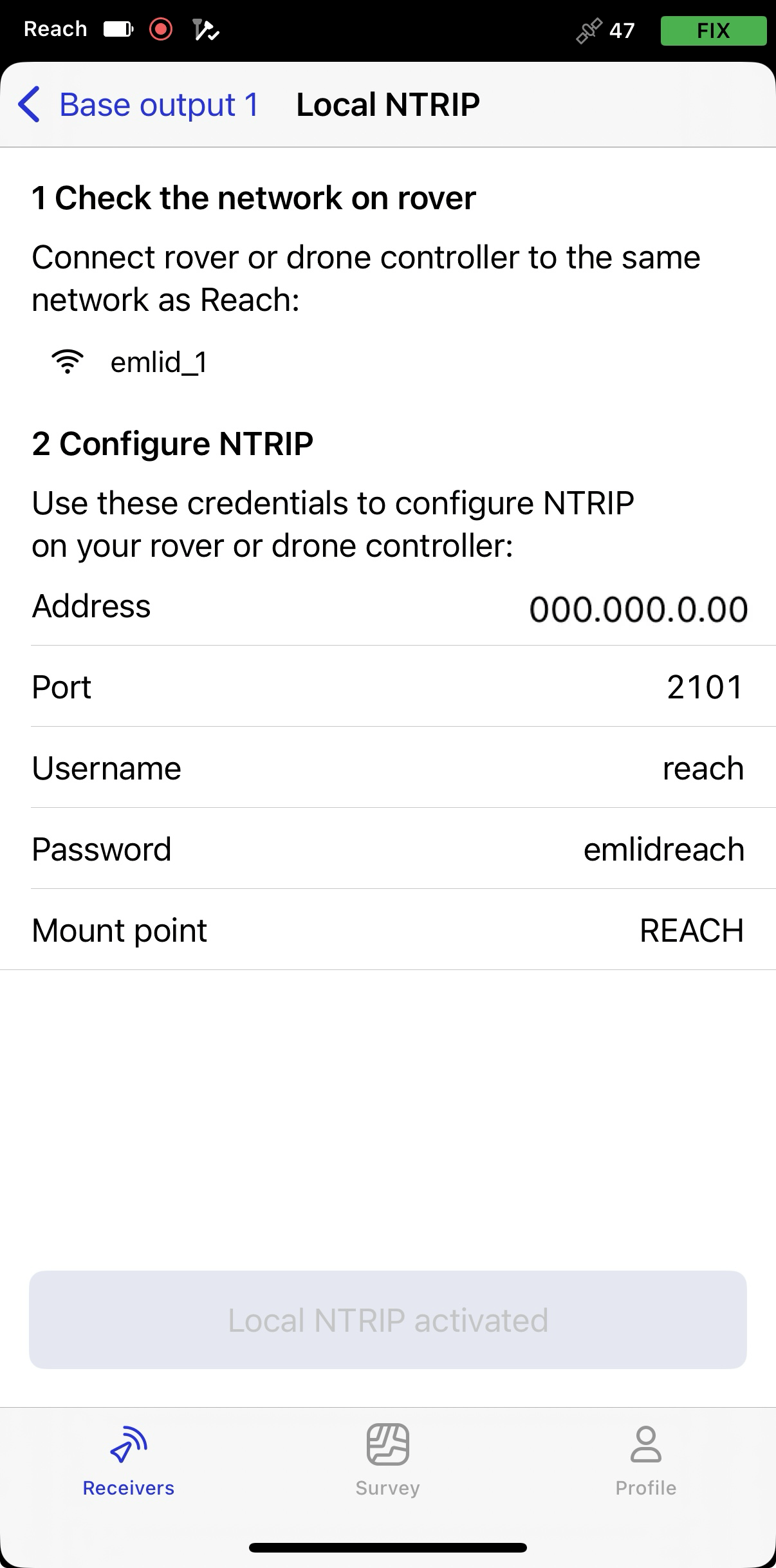
Agora, você precisa conectar o controlador do drone ao ponto de acesso do Reach e inserir as credenciais obtidas para estabelecer a transmissão de correções.
Configure o Reach RS4/RS4 Pro como base usando o Emlid Caster
Essa configuração só funcionará com seu drone Skydio RTK se ele suportar uma conexão com a Internet.
Para configurar o Reach RS4/RS4 Pro como base para o drone Skydio RTK usando o Emlid Caster, é necessário acessar o Emlid Caster e obter as credenciais NTRIP. Siga os passos abaixo:
-
Acesse Emlid Caster e obtenha as credenciais NTRIP para a base e o rover.
dicaPara saber mais, consulte a documentação do Emlid Caster.
-
Coloque o seu Reach no tripé e garanta que ele tenha uma visão limpa do céu.
dicaSaiba mais sobre a colocação e a configuração da base nos guias Colocação e Escolhendo um método de colocação da base.
-
Abra o Emlid Flow e conecte-se ao seu receptor.
-
Conecte o seu Reach à Internet.
dicaPara saber mais sobre como conectar seu Reach RS4 / RS4 Pro à Internet, consulte os guias a seguir:
-
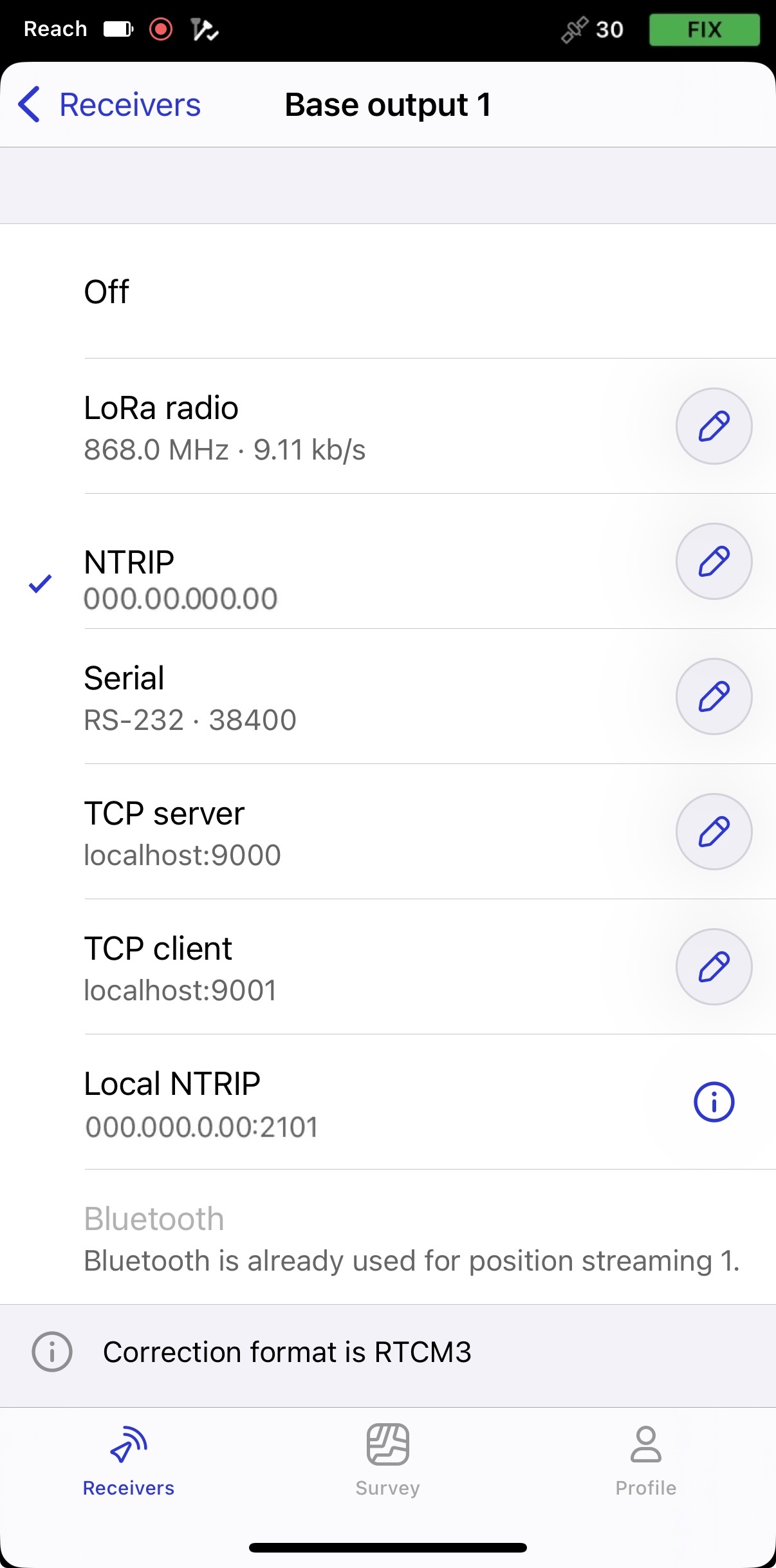
Na tela Receptores (Receivers), toque em Saída da base (Base output) e selecione a opção NTRIP.
-
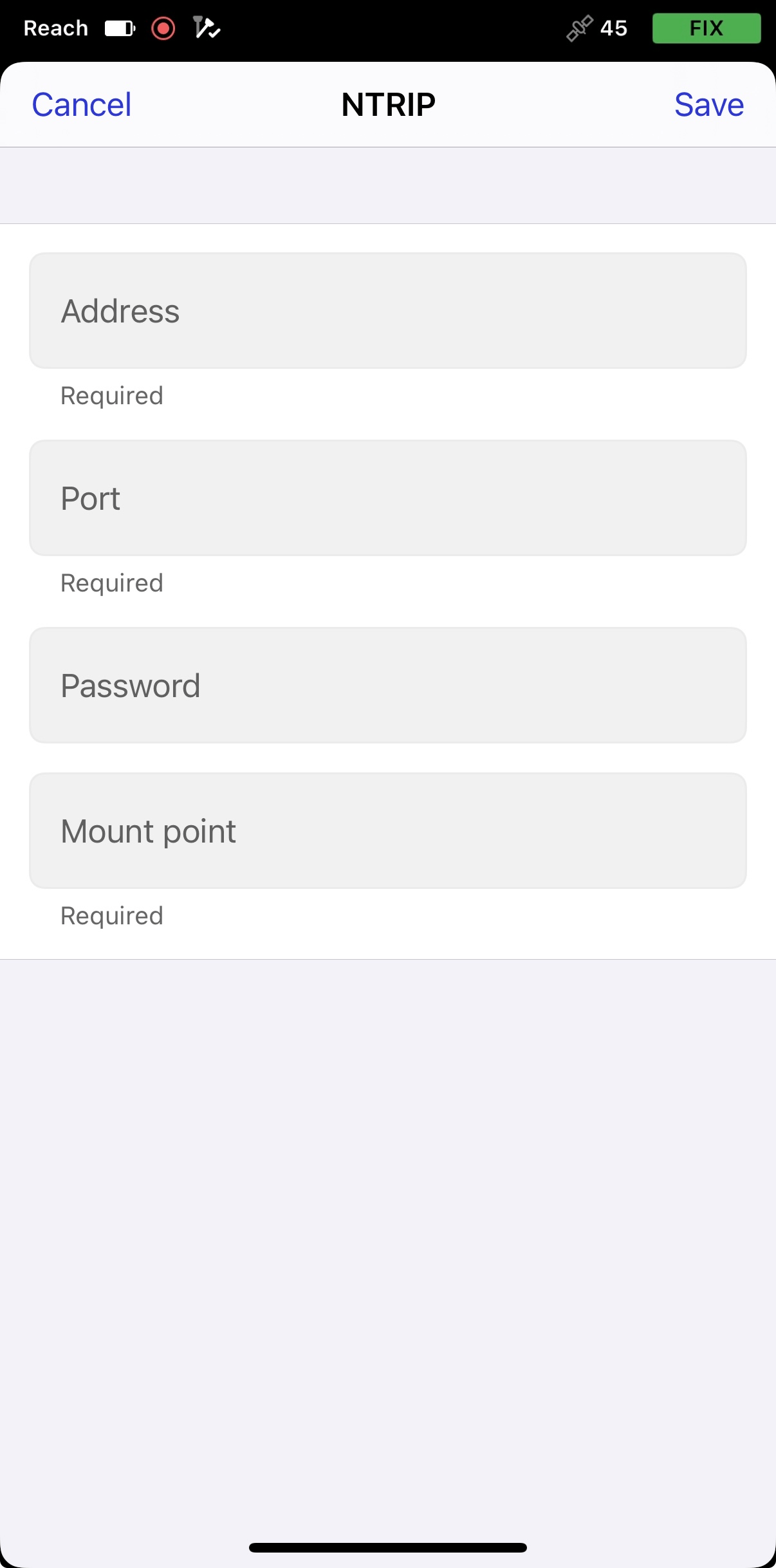
Toque no botão Edit (Editar) e insira as credenciais NTRIP da base que você obteve anteriormente:
-
Endereço: A URL ou o endereço IP do transmissor NTRIP.
-
Porta: A porta usada para se conectar ao transmissor. O valor padrão geralmente é 2101, a menos que seu provedor especifique uma porta diferente.
-
Nome de usuário: O nome de usuário utilizado para autenticação no serviço NTRIP. Em alguns casos, pode ser o seu nome ou endereço de e-mail.
-
Senha: A senha associada ao nome de usuário.
-
Estação de referência: O nome do fluxo de correção fornecido pelo serviço NTRIP.
dicaPara saber qual a estação de referência mais adequada, consulte o site do seu fornecedor NTRIP. Em geral, distâncias mais curtas até a estação de referência melhoram o desempenho do RTK.
notaPara garantir o sucesso da transmissão das correções, verifique novamente as credenciais introduzidas.
-
Agora, você precisa inserir as credenciais do rover no controlador do drone para estabelecer uma transmissão de correções.
Configure o drone Skydio como rover
Para configurar o drone Skydio usando o controlador X10, siga os passos abaixo:
-
Instale o acessório RTK/PPK em seu drone. Saiba mais sobre o processo na documentação do Skydio.
-
Ligue o drone e o controle.
-
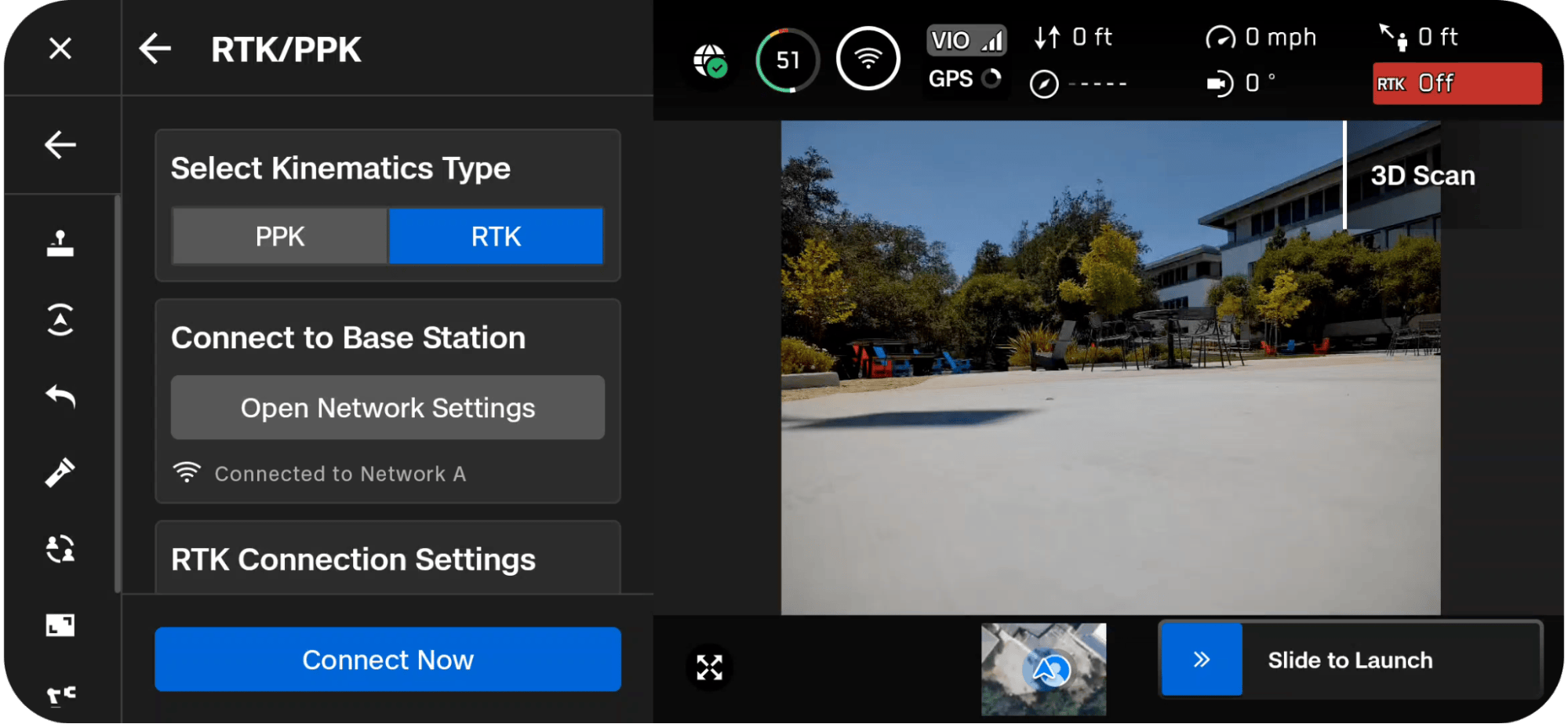
Quando o acessório estiver conectado, selecione Set Up RTK (Configurar o RTK) no controlador.
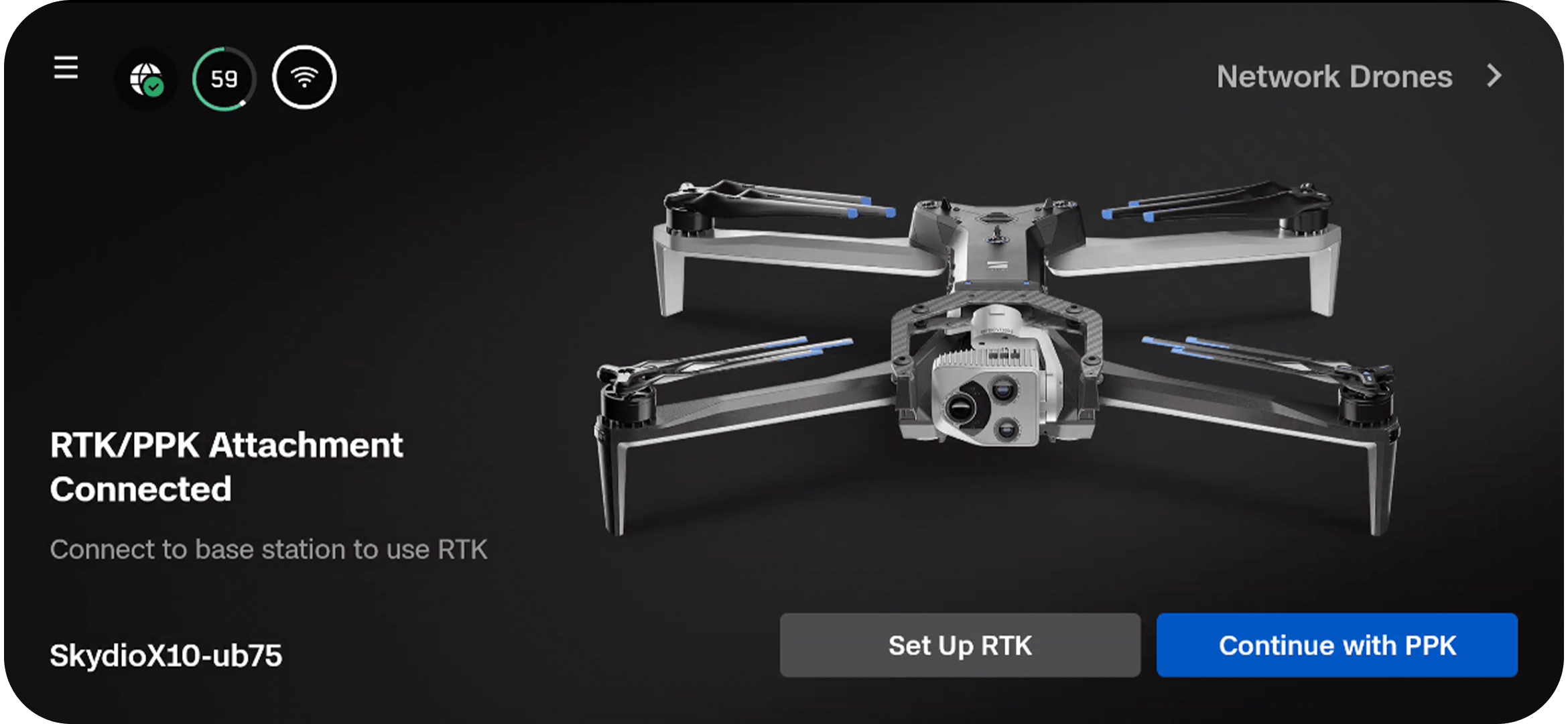
-
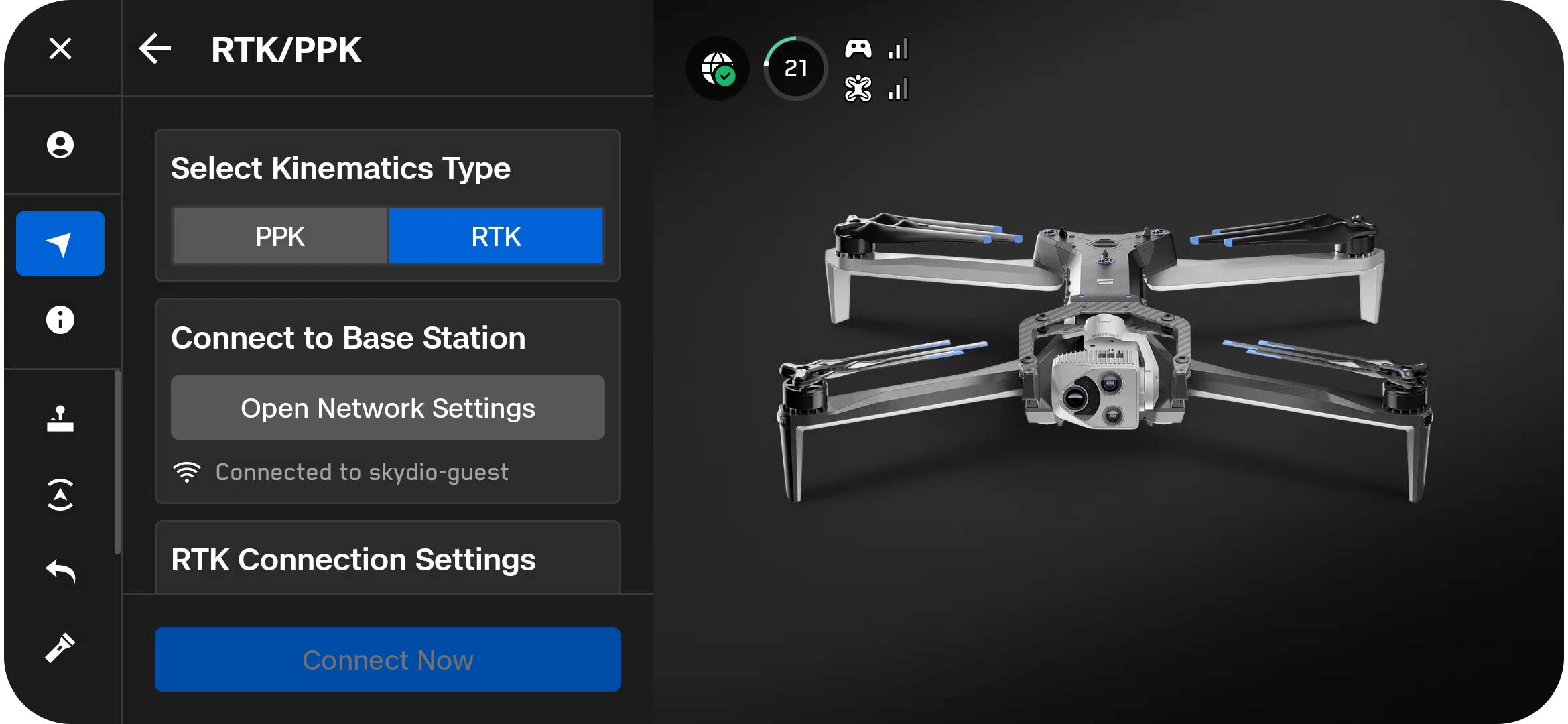
Em Connect to Base Station (Conectar à estação base), toque em Open Network Settings (Abrir configurações de rede) para se conectar à estação base.
-
Digite as credenciais obtidas ao acessar o Emlid Caster ou ao ativar a opção Local NTRIP (NTRIP local) no Emlid Flow:
- Host NTRIP: A URL ou o endereço IP do servidor NTRIP.
- Porta: A porta usada para se conectar ao transmissor. O valor padrão geralmente é 2101, a menos que seu provedor especifique uma porta diferente.
- Conta: O nome de usuário utilizado para autenticação no serviço NTRIP. Em alguns casos, pode ser o seu nome ou endereço de e-mail.
- Senha: A senha associada ao nome de usuário.
- Estação de referência: O nome do fluxo de correção fornecido pelo serviço NTRIP.
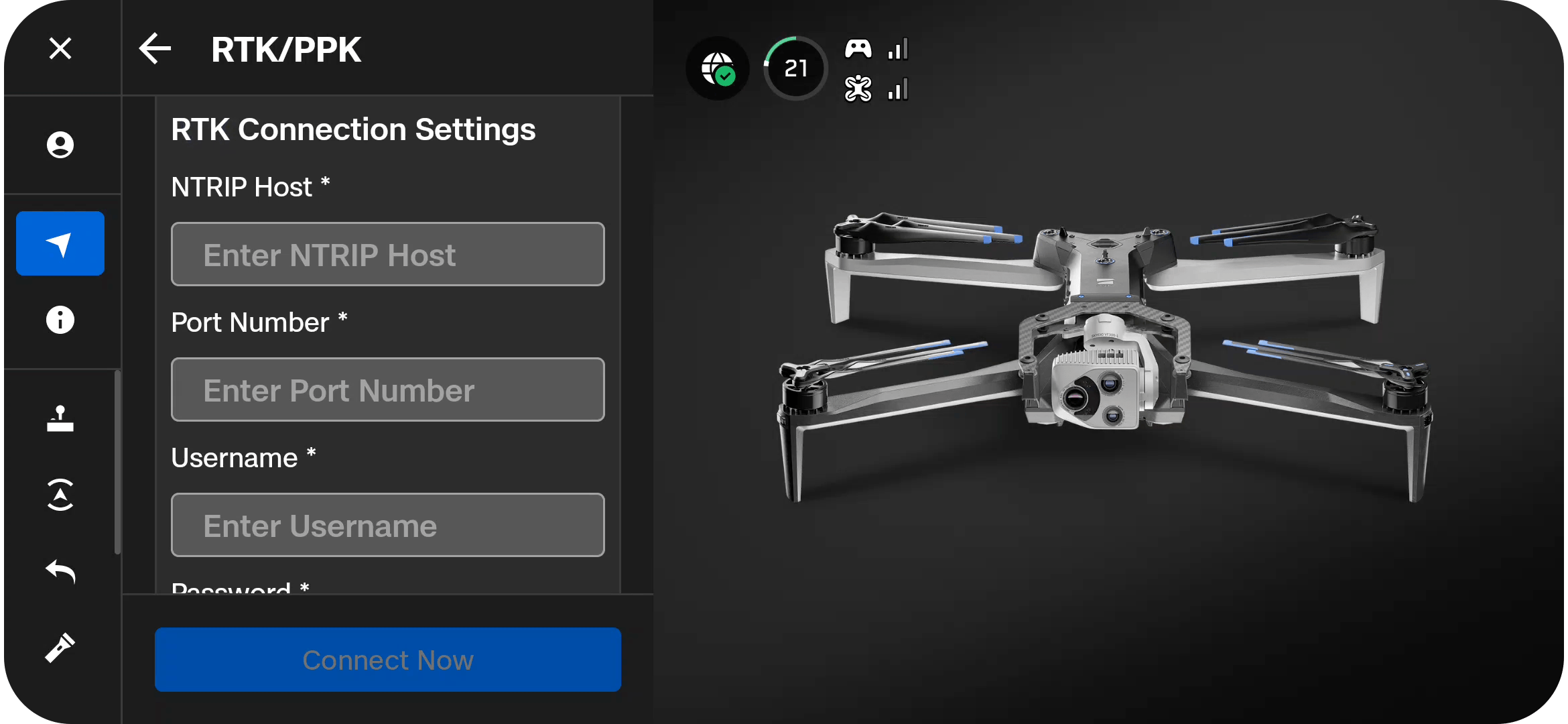
Certifique-se de estar usando as credenciais para o rover.
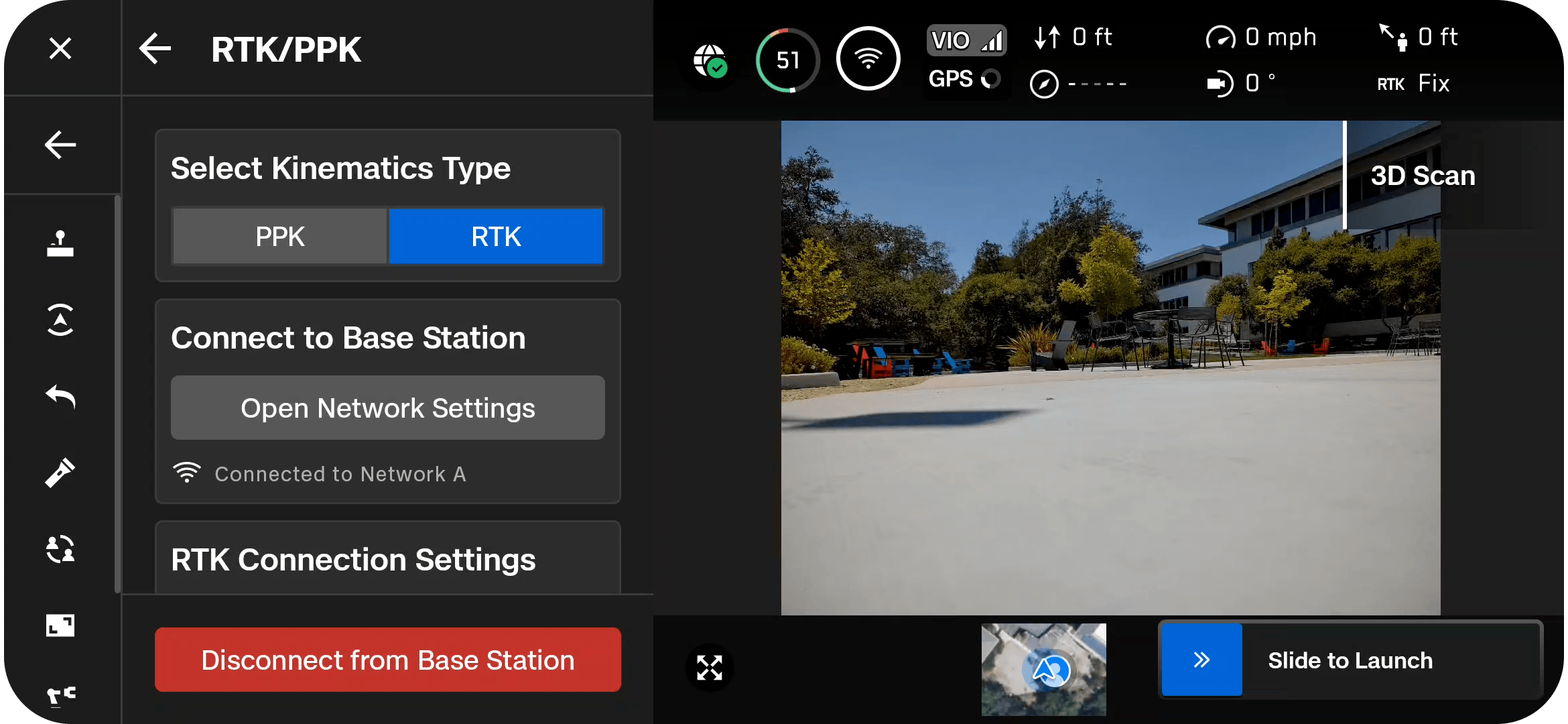
- Toque em Connect Now (Conectar agora). Depois de conectado, a opção Disconnect from Base Station (Desconectar da estação base) será exibida, e o indicador de telemetria no canto superior direito mostrará o status da solução. É necessário um status FIX para prosseguir com o voo.
Realizar voo
Depois que a comunicação entre o Reach RS4/RS4 Pro e o drone Skydio for estabelecida, você poderá prosseguir com a configuração da missão de voo e a realização do voo.
Saiba mais sobre a configuração da missão de voo seguindo a seção Complete a Map Capture (Completando uma captura de mapa) na documentação do Skydio.