Cómo configurar Reach RS4/RS4 Pro como base para el dron DJI RTK
Esta guía muestra cómo configurar tu Reach RS4/RS4 Pro como base para drones DJI RTK como Phantom 4 RTK, Mavic 3E y Matrice 300 RTK para geoetiquetar imágenes de drones para después cartografiarlas en un software de fotogrametría.
Obtenga más información sobre RTK y PPK en las siguientes guías:
Resumen
Los drones DJI RTK utilizan NTRIP para recibir correcciones, lo que permite utilizar Reach RS4/RS4 Pro como estación base. Reach puede enviar correcciones NTRIP mediante Emlid Caster a través de Internet o utilizando la opción NTRIP local en Emlid Flow sin conexión a Internet.
Para configurar su Reach RS4/RS4 Pro como base para el dron DJI RTK, necesitará lo siguiente:
- El dron DJI RTK con GS RTK como rover
- Controlador
- Reach RS4/RS4 Pro como base
- Un smartphone o una tableta con la aplicación Emlid Flow instalada
- Conexión a Internet en ambos dispositivos si utiliza Emlid Caster
- Acceso a Emlid Caster
En esta guía utilizaremos el dron DJI Phantom 4 RTK, pero el proceso es el mismo para los demás drones DJI RTK.
Tutorial en vídeo
El siguiente vídeo muestra el proceso de configuración de Reach RS2/RS2+ como base para el dron DJI Phantom 4 RTK con Emlid Caster. El proceso es el mismo para Reach RS4 / RS4 Pro.
Este vídeo no cubre el proceso de configuración de Reach como base para el dron DJI Phantom 4 RTK utilizando la opción NTRIP local. Puede comprobar este flujo de trabajo en la sección a continuación.
Tutorial de texto
El siguiente texto cubre el proceso de configuración del Reach RS4/RS4 Pro como base para el dron DJI RTK utilizando Emlid Caster a través de internet o la opción NTRIP local en Emlid Flow.
Configurar Reach RS4/RS4 Pro como base
Reach RS4/RS4 Pro puede enviar correcciones NTRIP a través de Emlid Caster o utilizando la opción NTRIP local en Emlid Flow. La diferencia es que Emlid Caster requiere una conexión a Internet y NTRIP local permite configurar RTK sin conexión a Internet. Seleccione el método en función de su caso de uso y siga los pasos que se indican a continuación.
Configurar Reach RS4/RS4 Pro como base utilizando el NTRIP local
Esta configuración solo funcionará con su dron DJI RTK si admite una conexión Wi-Fi.
Para configurar su Reach como base para el dron DJI Phantom 4 RTK mediante la opción NTRIP local en Emlid Flow, siga los pasos que se indican a continuación:
-
Coloque su Reach en el trípode con una vista despejada del cielo.
tipObtenga más información sobre la colocación y configuración de la base en los artículos Colocación y Elegir el método de configuración de la base.
-
Abra Emlid Flow y conéctese a su Reach.
-
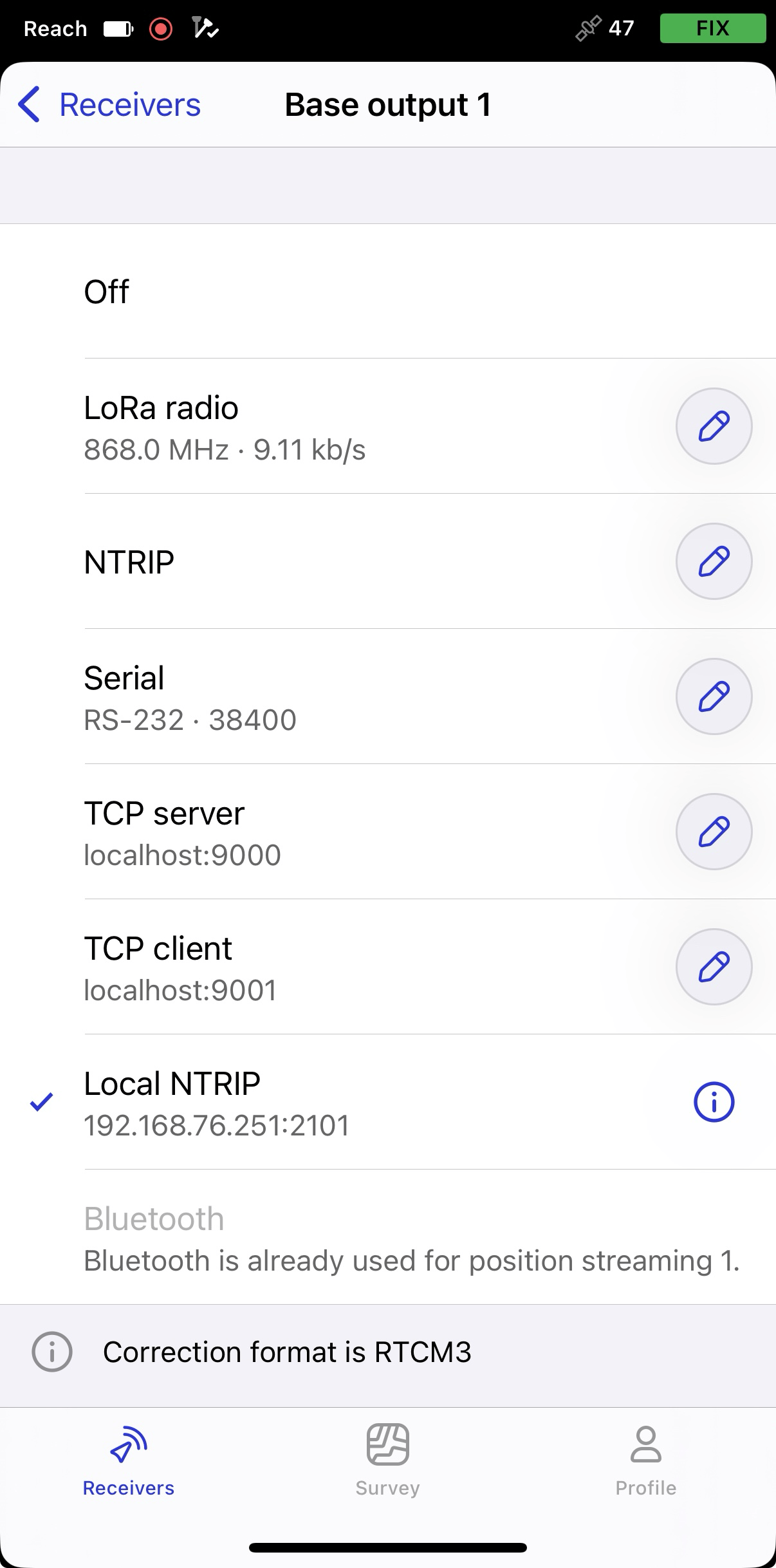
Pulse Salida de la base y seleccione la opción NTRIP local.
-
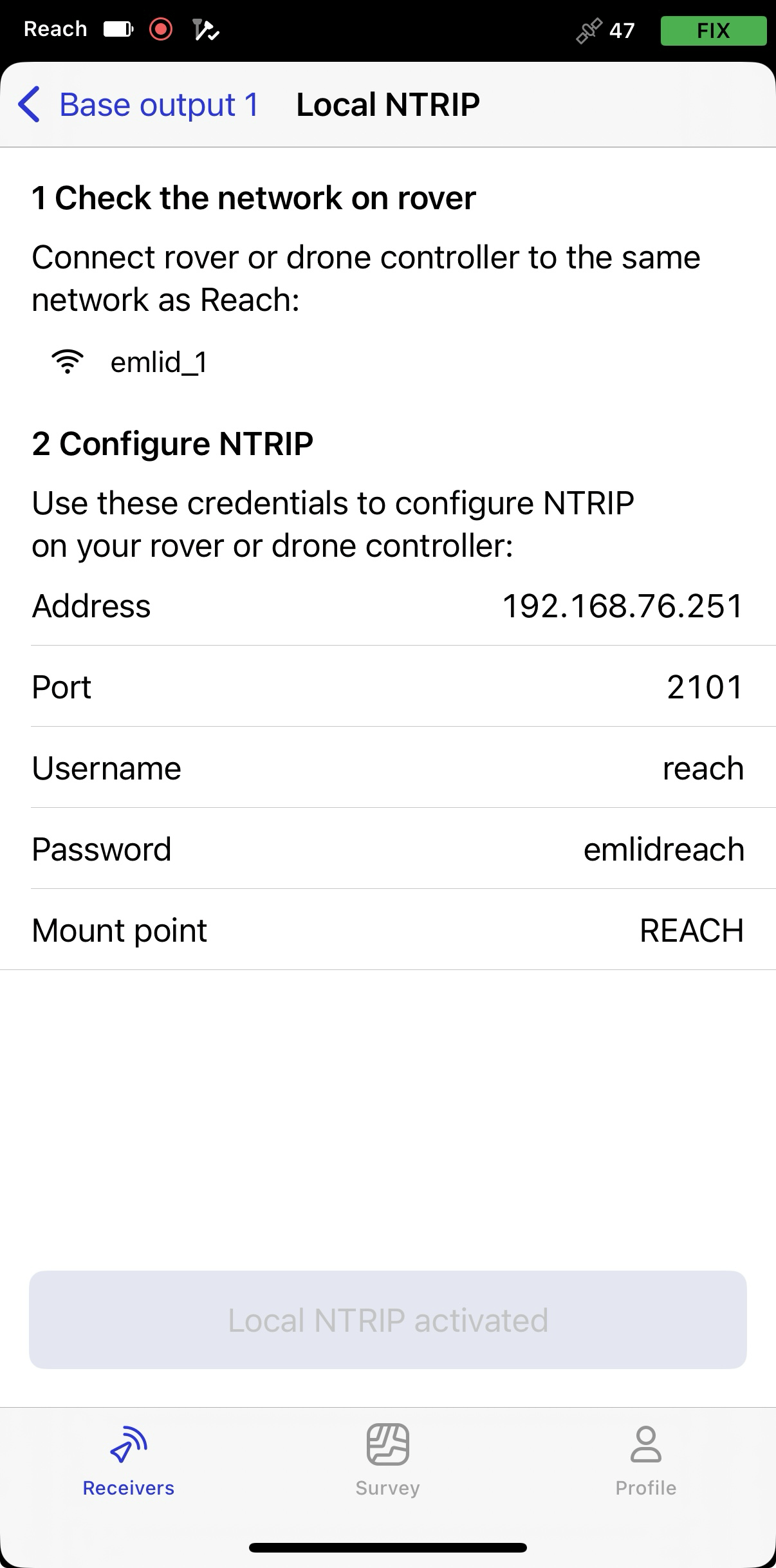
Pulse el botón Información para acceder a la página con las credenciales del rover.
-
Conecte su mando a la misma red Wi-Fi que su Reach.
notaPara garantizar una conexión adecuada, mantenga una distancia de varios metros entre el controlador del dron y su base.
Configurar Reach RS4/RS4 Pro como base utilizando Emlid Caster
Para configurar su Reach RS4 / RS4 Pro como base para su dron DJI RTK utilizando Emlid Caster, necesita acceder a Emlid Caster y obtener credenciales NTRIP. Siga los pasos que se indican a continuación:
-
Acceda a Emlid Caster y consiga las credenciales de NTRIP tanto para la base como para el rover.
tipPara obtener más información, consulte la [documentación] de Emlid Caster (https://docs.emlid.com/emlid-caster/getting-started-emlid-caster).
-
Coloque su Reach en el trípode con una vista despejada del cielo.
tipObtenga más información sobre la colocación y configuración de la base en las guías Colocación y Elegir el método de configuración de la base.
-
Abra Emlid Flow y conéctese a su receptor.
-
Conecte su Reach a Internet.
tipPara obtener más información sobre cómo conectar su Reach RS4/RS4 Pro a Internet, consulte las siguientes guías:
-
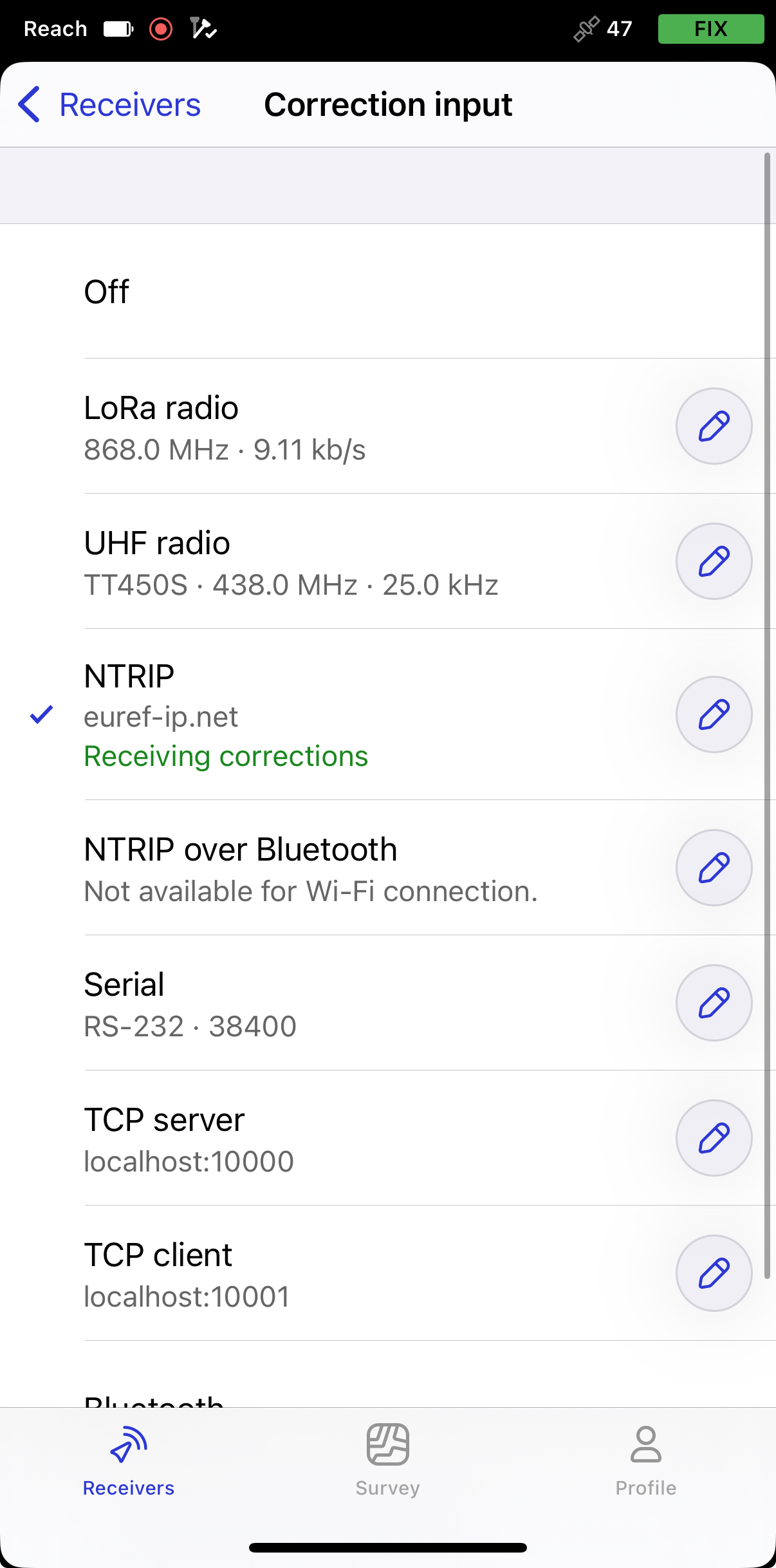
En la pantalla Receptores, pulse Salida de la base y seleccione la opción NTRIP.
-
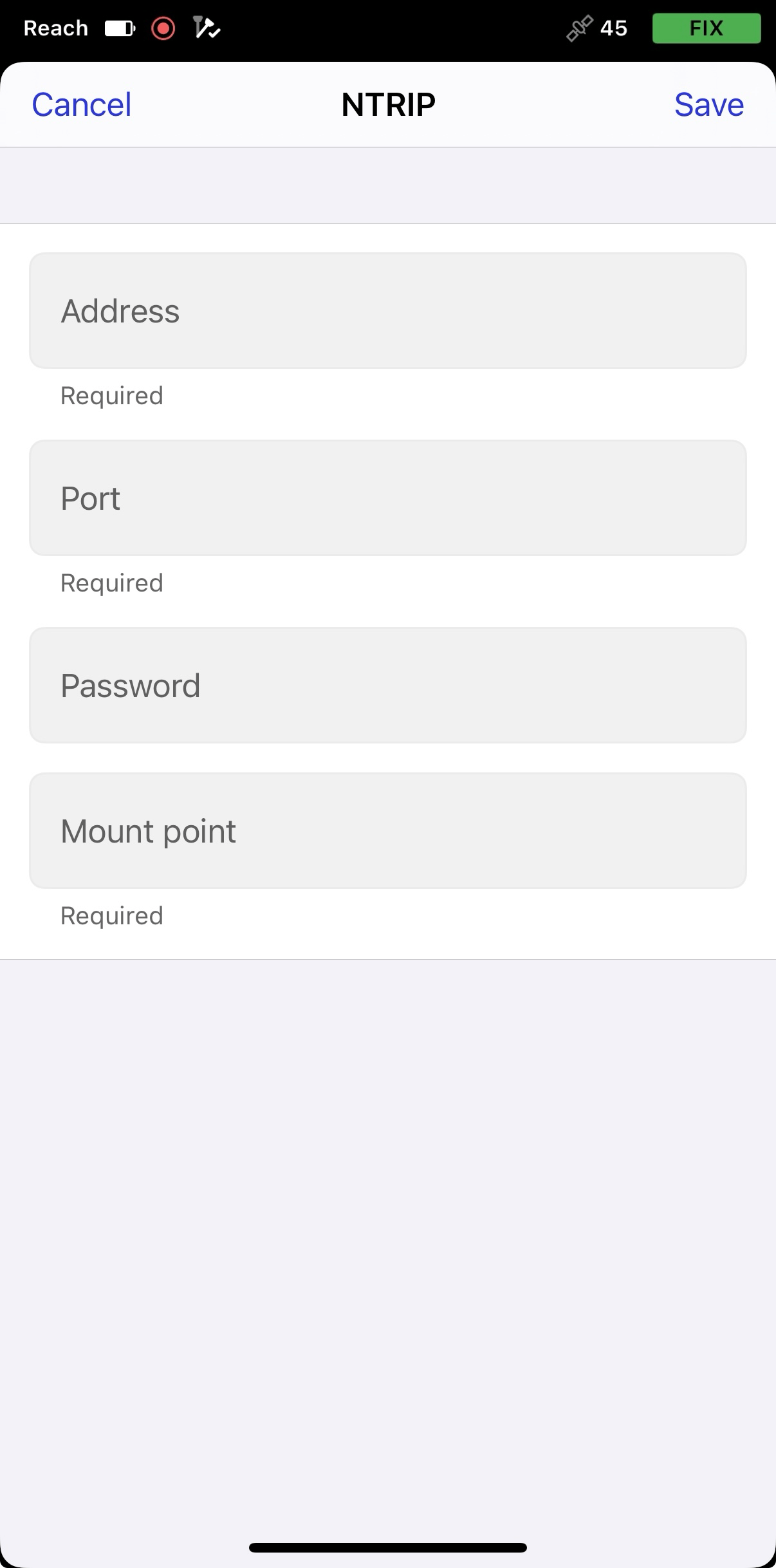
Pulse el botón Edit (Editar) e introduzca las credenciales NTRIP de la base:
-
Dirección: la URL o la dirección IP del caster NTRIP.
-
Puerto: el puerto utilizado para conectarse al emisor. El valor predeterminado suele ser 2101, a menos que su proveedor especifique un puerto diferente.
-
Nombre de usuario: el nombre de usuario que se utiliza para autenticarse en el servicio NTRIP. En algunos casos, puede tratarse de su nombre o su dirección de correo electrónico.
-
Contraseña: la contraseña asociada al nombre de usuario.
-
Punto de montaje: el nombre del flujo de corrección proporcionado por el servicio NTRIP.
tipPara saber qué punto de montaje le conviene más, consulte el sitio web de su proveedor NTRIP. En general, las distancias más cortas a la estación de referencia mejoran el rendimiento de RTK.
notaPara garantizar el éxito de la transmisión de las correcciones, vuelva a comprobar las credenciales introducidas.
-
Una vez coloque y configure su base, puede proceder a la configuración del dron.
Configurar DJI Phantom 4 RTK como rover
Para configurar su DJI Phantom 4 RTK como rover, siga los pasos que se indican a continuación:
-
Conecte el controlador a su dron.
-
Abrir GS RTK.
-
Seleccione el menú Planificar o Volar. Si elige Planificar, seleccione un método de planificación.
-
Abra Configuración tocando el icono de los 3 puntos en la esquina superior derecha.
-
Vaya a la pestaña Configuración del RTK.
-
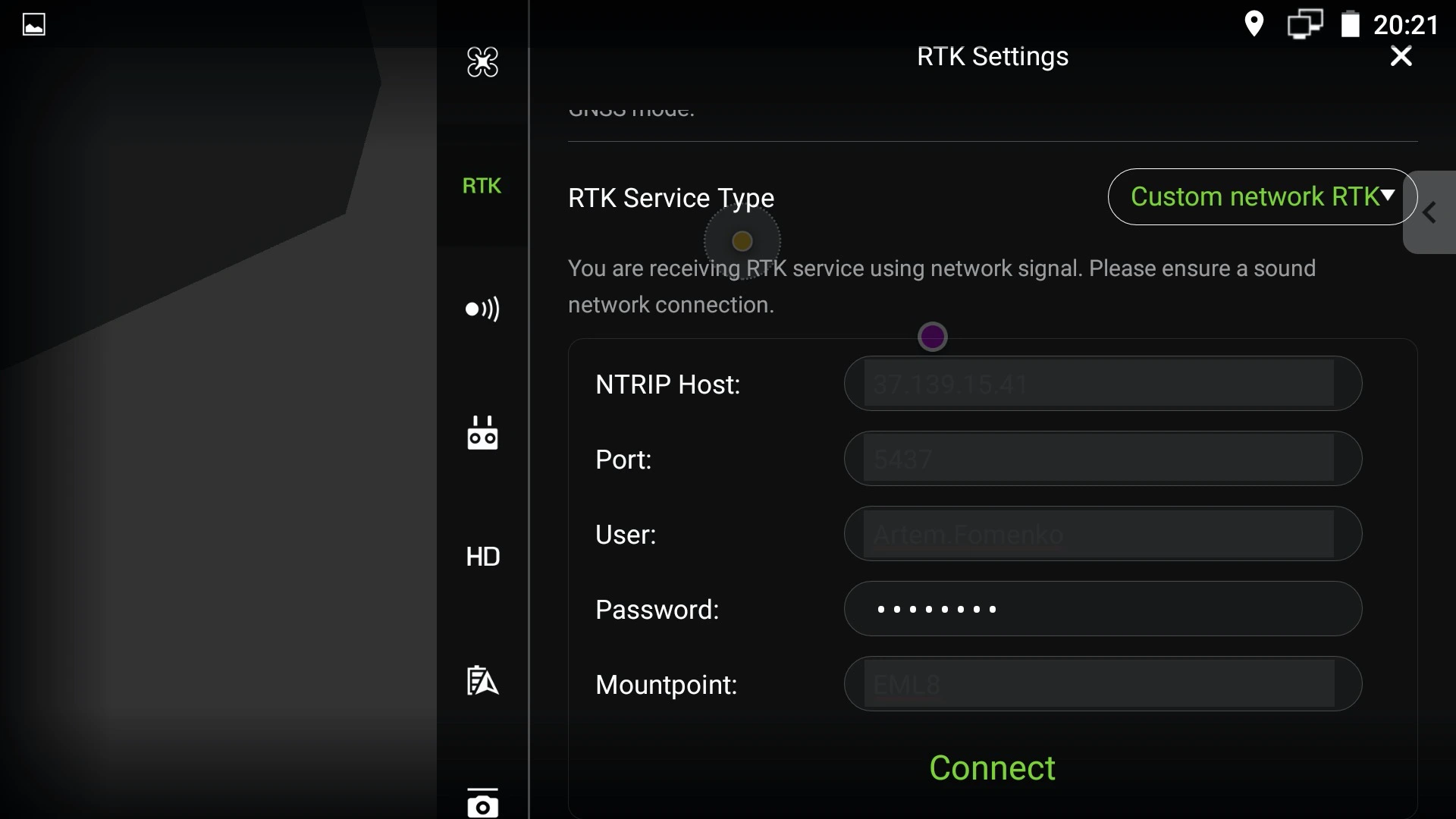
En RTK Service Type (Tipo de servicio RTK), elija Custom network RTK (Red RTK personalizada) y rellene el formulario de credenciales NTRIP:
- Servidor NTRIP: la URL o la dirección IP del servidor NTRIP.
- Puerto: el puerto utilizado para conectarse al emisor. El valor predeterminado suele ser 2101, a menos que su proveedor especifique un puerto diferente.
- Cuenta: el nombre de usuario que se utiliza para autenticarse en el servicio NTRIP. En algunos casos, puede tratarse de su nombre o su dirección de correo electrónico.
- Contraseña: la contraseña asociada al nombre de usuario.
- Punto de montaje: el nombre del flujo de corrección proporcionado por el servicio NTRIP.
notaIntroduzca las credenciales obtenidas al acceder a Emlid Caster o al activar la opción NTRIP local en Emlid Flow. Asegúrese de que usa las credenciales para el rover.
-
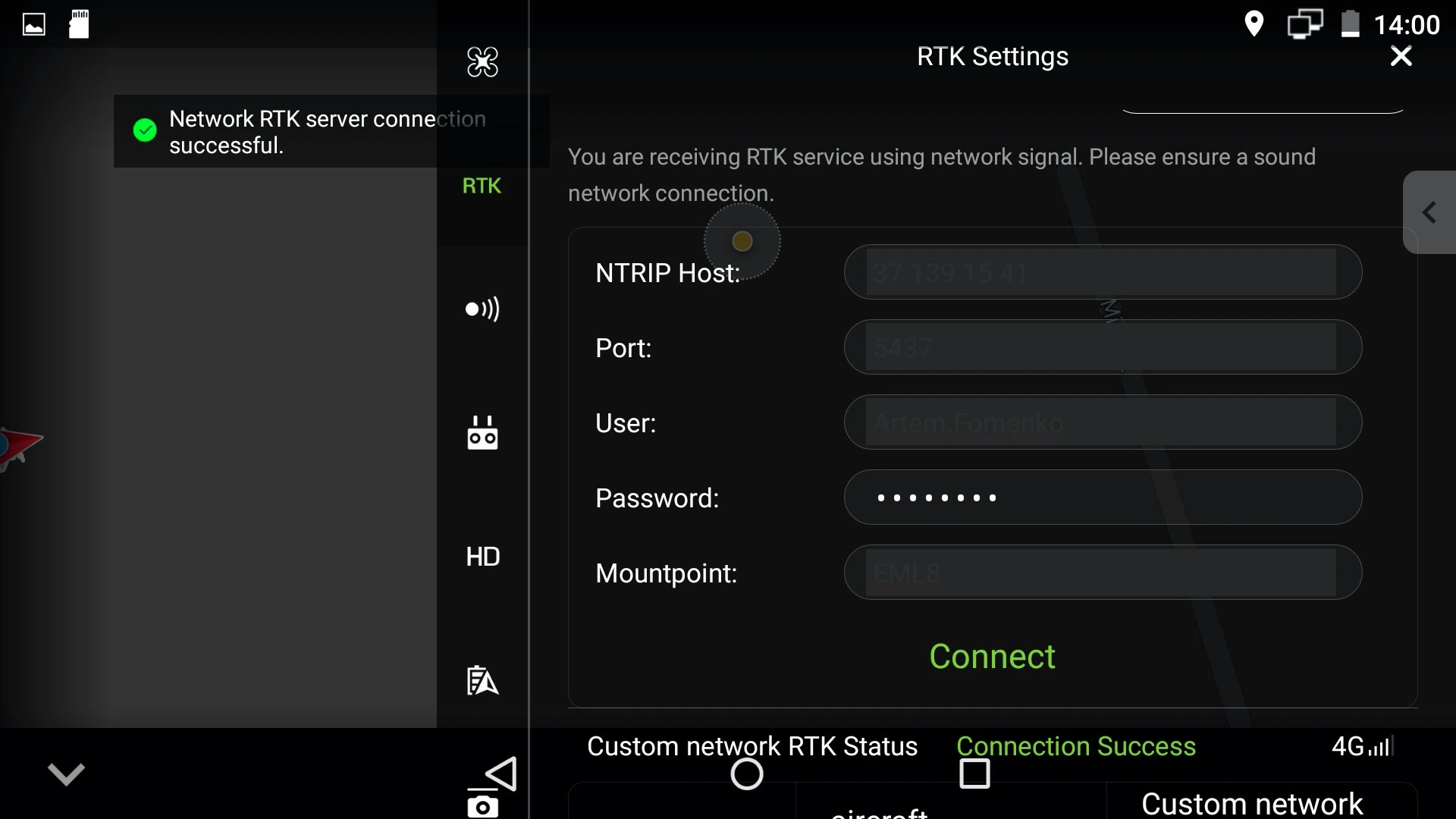
Pulse el botón Conectar (Connect). Aparecerá el mensaje "Network RTK server connection successful" (Network RTK server connection successful). Esto significa que la base se ha conectado correctamente.
Configurar otros drones DJI como rover en Pilot 2
Para configurar sus rovers DJI RTK , siga los pasos que se indican a continuación:
-
Conecte el controlador a su dron.
-
Abra Pilot 2.
-
En el menú Drone Settings (Configuración del dron) de Flight Dashboard (Panel de vuelo), pulse RTK.
-
Elija Custom Network RTK (Red RTK personalizada) o D-RTK 2 Mobile Station (Estación móvil D-RTK 2) como fuente RTK. Si está usando un servicio RTK personalizado, introduzca los detalles de conexión necesarios y pulse Start Transmitting (Iniciar transmisión).
Cuando la conexión RTK se establece correctamente, todos los indicadores de estado se vuelven verdes, incluido el icono RTK.
Realizar el vuelo
Cuando establezca la comunicación entre su Reach RS4/RS4 Pro y un dron, podrá llevar a cabo el vuelo. Proporcione a su dron DJI RTK una vista despejada del cielo y siga con la misión.

Una vez finalizado el vuelo, puede descargar las imágenes geoetiquetadas y utilizarlas para cartografiarlas con un software de fotogrametría.
Para crear un mapa con Pix4DMapper, consulte el tutorial Crear el mapa.