Coletar pontos
Este guia mostra como coletar pontos para armazenar as suas posições num projeto utilizando o Emlid Flow.
Visão geral
O Coletor é uma ferramenta de levantamento do Emlid Flow que permite fazer a coleta de pontos com base em projetos. Utilizando a ferramenta Collector, você pode colocar
O Ponto de Controle Terrestre é um ponto numa superfície com coordenadas conhecidas. Os GCPs são utilizados ativamente na cartografia aérea e na fotogrametria. Os topógrafos definem os GCPs sobre a área e os marcam para que sejam visíveis a partir do drone. Os GCPs são então levantados para encontrar as suas coordenadas exatas e utilizados como pontos de referência para posterior processamento dos dados.
Coletando pontos
- Emlid Flow
Para coletar um ponto utilizando o Emlid Flow, siga os passos abaixo:
-
Abra o Emlid Flow e conecte-se ao seu Reach.
-
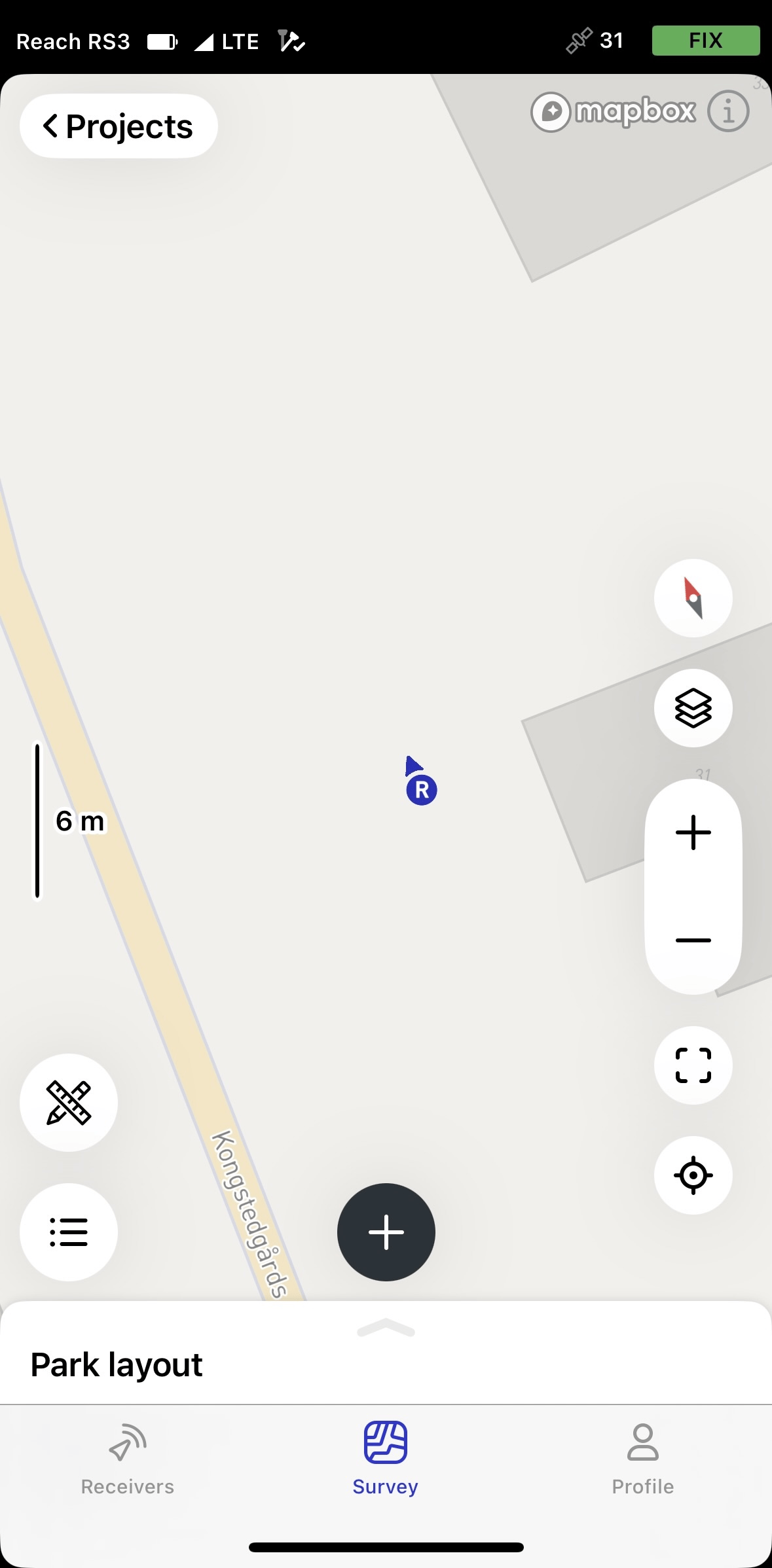
Acesse a aba Levantamento e abra ou crie um projeto.
tipPara saber como criar um projeto, consulte o guia Criar ou importar projeto.
-
Toque no botão Mais para abrir o menu Coletor.

-
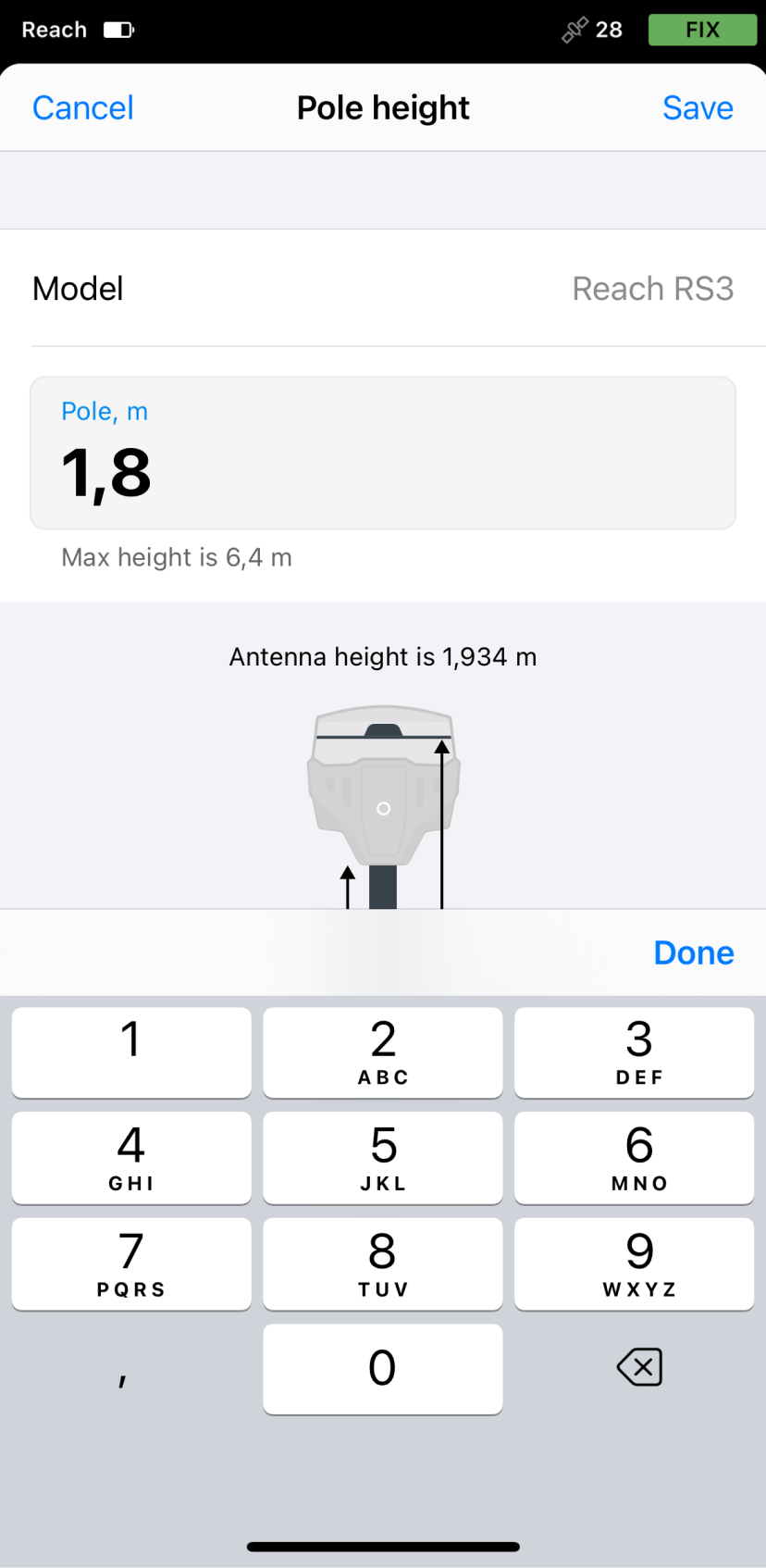
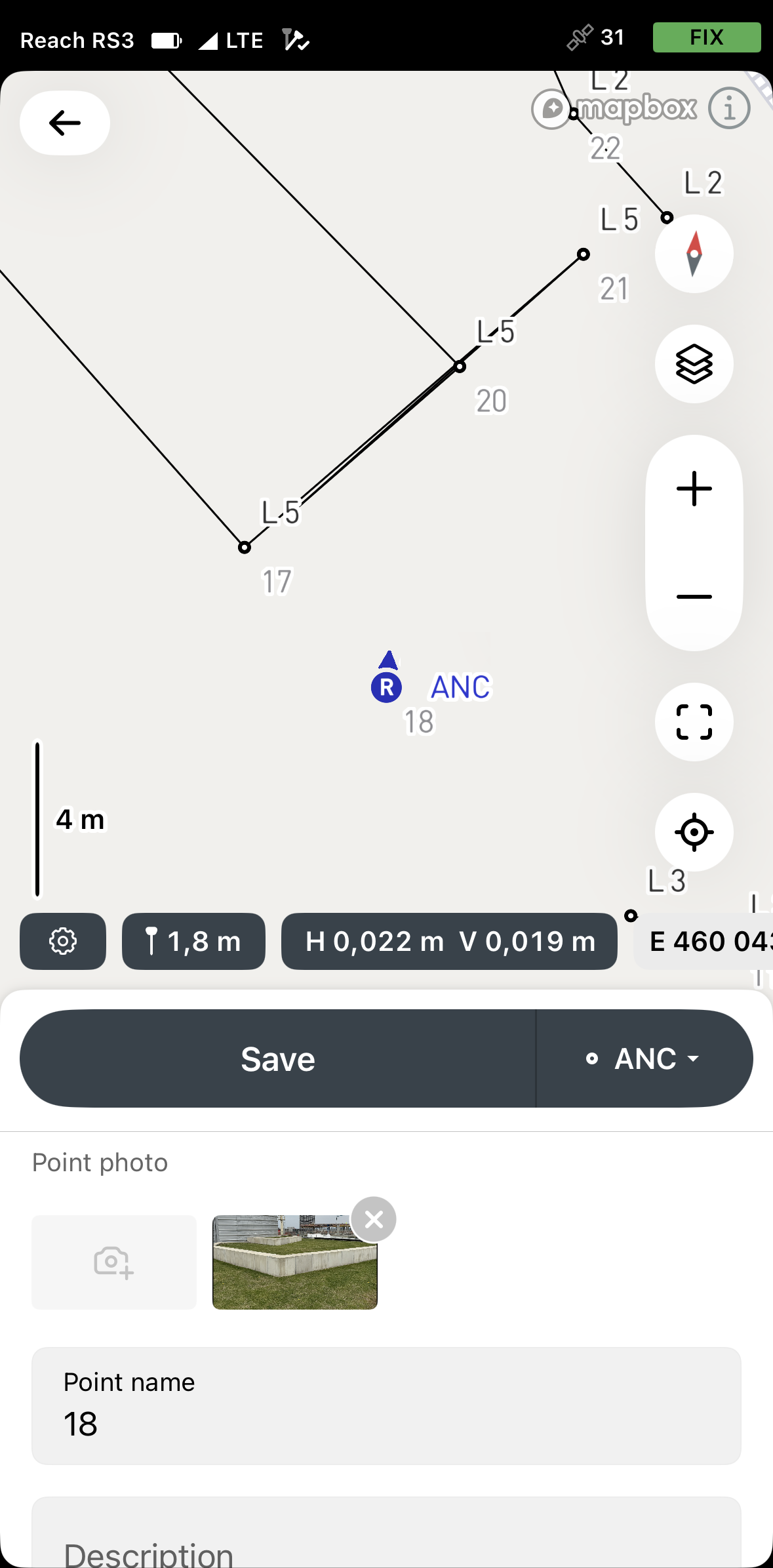
Defina a
altura do bastão. Por padrão, este parâmetro está definido para 1,8 m.Ao se preparar para a coleta de pontos, configure a altura do seu bastão topográfico no Emlid Flow. Ajudará a aplicação a calcular automaticamente a altura da antena.
-
Para ajustar as configurações da pesquisa, toque no ícone de engrenagem e ative ou configure as seguintes opções:
- Somente para o Reach RS3: compensação de inclinação. Você pode ativar e desativar a compensação de inclinação.
- Controle de precisão. Você pode configurar o seu receptor para recolher dados apenas quando o seu Reach tiver FIX solution status.
O status da solução define a precisão que pode ser alcançada no momento. Existem três status de solução que você poderá ver ao trabalhar com dispositivos Reach.
SINGLE significa que o rover encontrou uma solução com base no seu próprio receptor e que não serão aplicadas correções de base. A precisão em modo standalone situa-se geralmente no nível de vários metros.
FLOAT significa que o rover recebe correções da base, mas não consegue resolver todas as ambiguidades e, neste caso, a precisão geralmente fica em nível submétrico.
FIX significa que o rover, utilizando as correções da base, resolveu as ambiguidades no seu cálculo posicional e obteve a solução com uma precisão de centimetros.
- Limite de precisão. Você pode definir valores de tolerância de precisão horizontal e vertical. As unidades para esses valores são as mesmas definidas para seu projeto.
- Modo de coleta. Você pode especificar o intervalo de tempo da coleta de dados - selecione o modo instantâneo, defina o tempo médio ou aplique o modo de coleta automática por tempo ou por distância. A coleta automática está disponível no plano
 .
.


-
Com o plano Pro, você pode selecionar o código da pesquisa tocando no botão Code selector (Seletor de código).

-
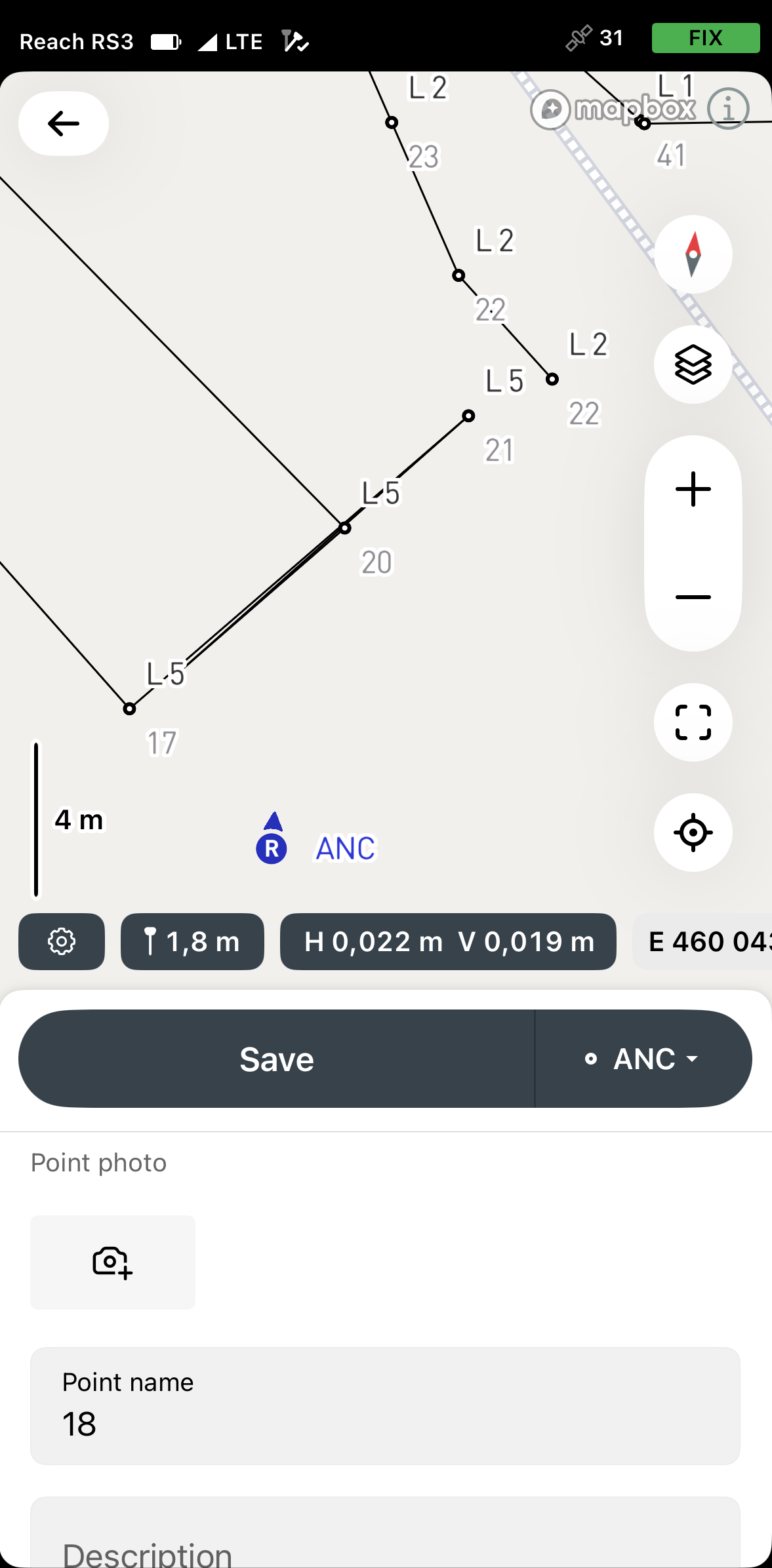
Com o plano Pro, você pode anexar uma foto ao ponto de duas maneiras:
-
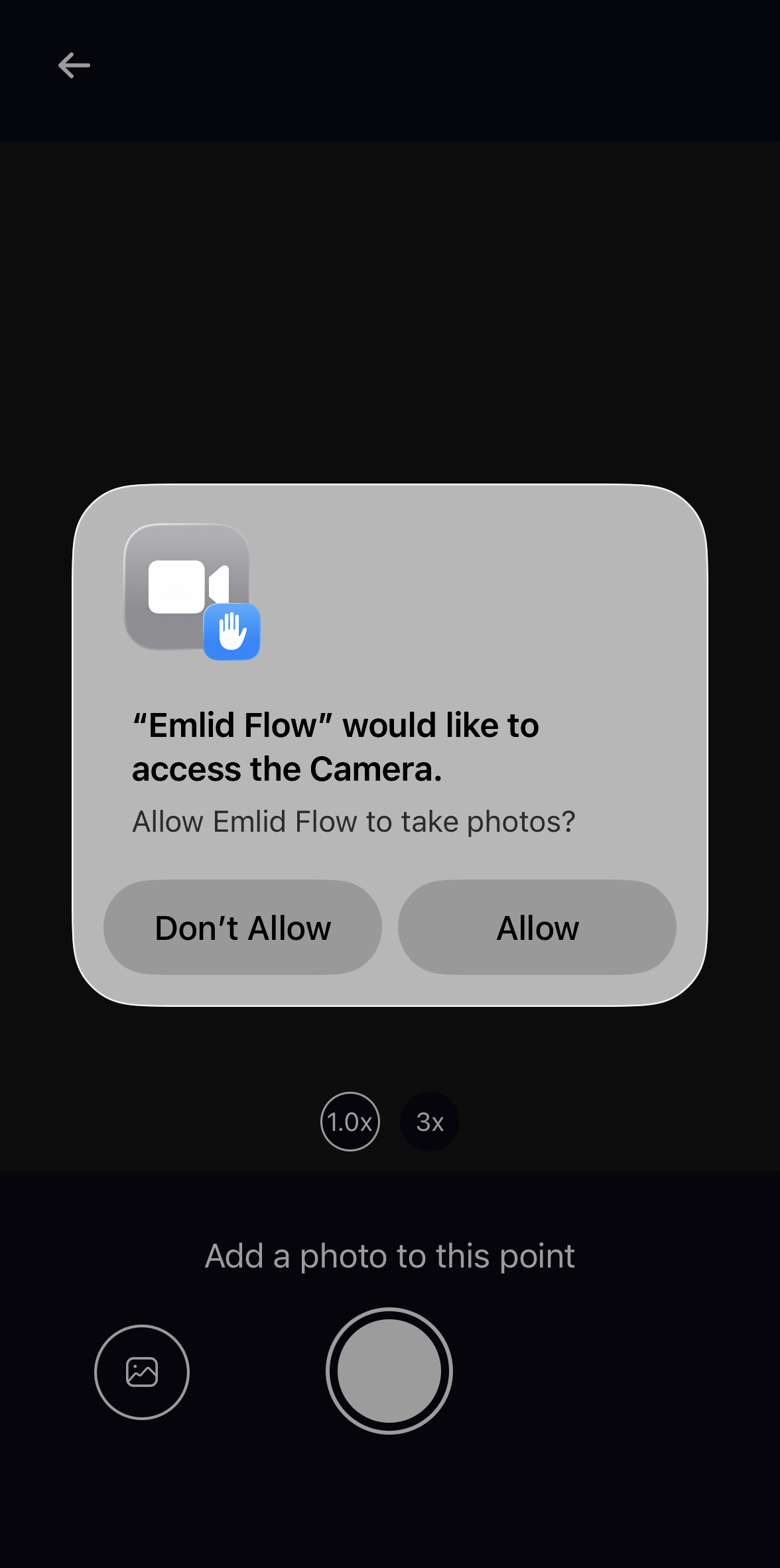
Tire uma foto diretamente no Emlid Flow. Navegue até o objeto, toque no botão Câmera, forneça acesso à câmera e tire uma foto do ponto.

-
Adicione uma foto de sua galeria. Toque no botão Câmera, forneça acesso à galeria do seu dispositivo e selecione a foto desejada.
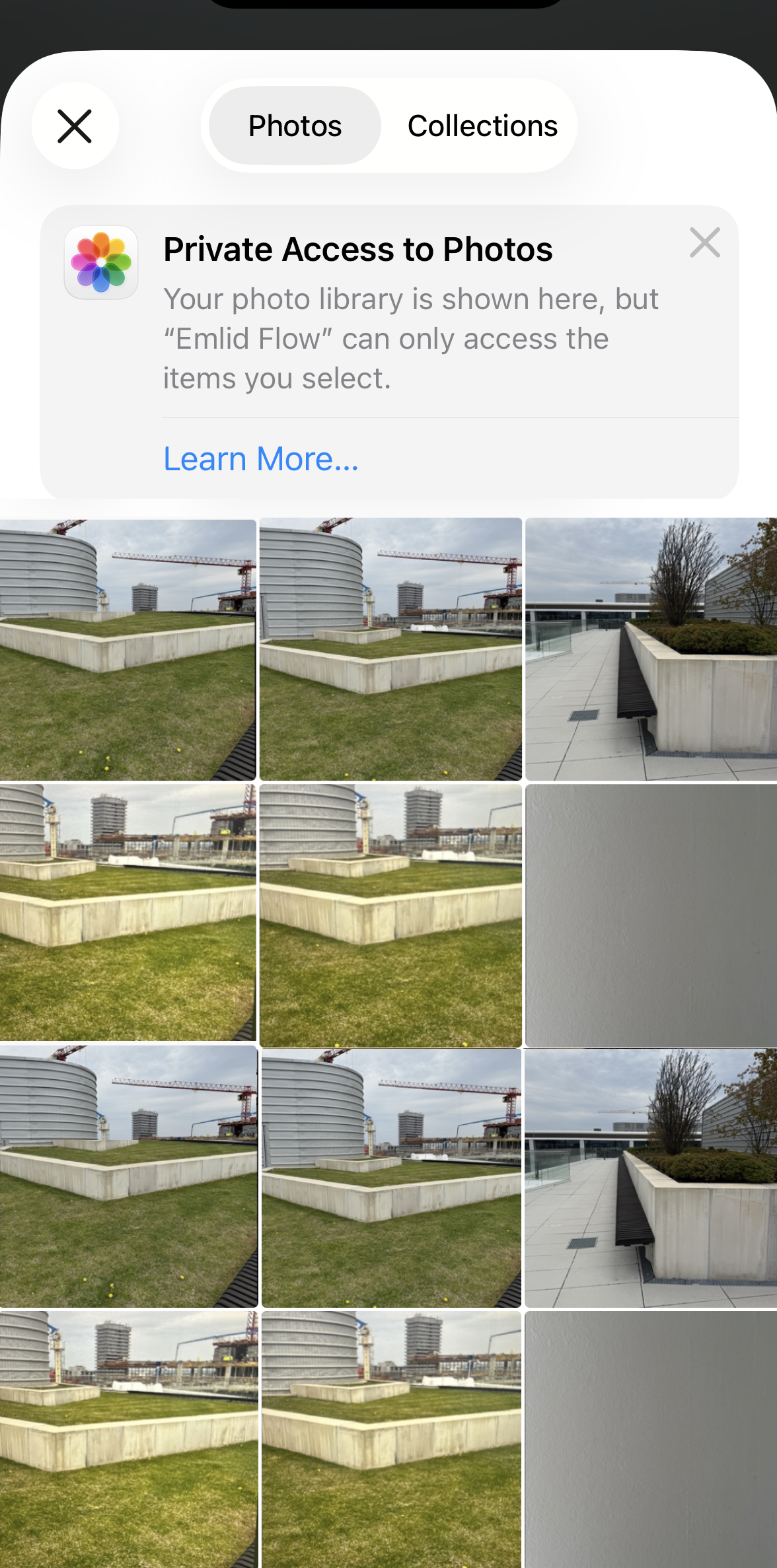

A foto anexada aparecerá no campo Point photo (Foto do ponto). Se necessário, você pode excluí-lo e substituí-lo por um novo.
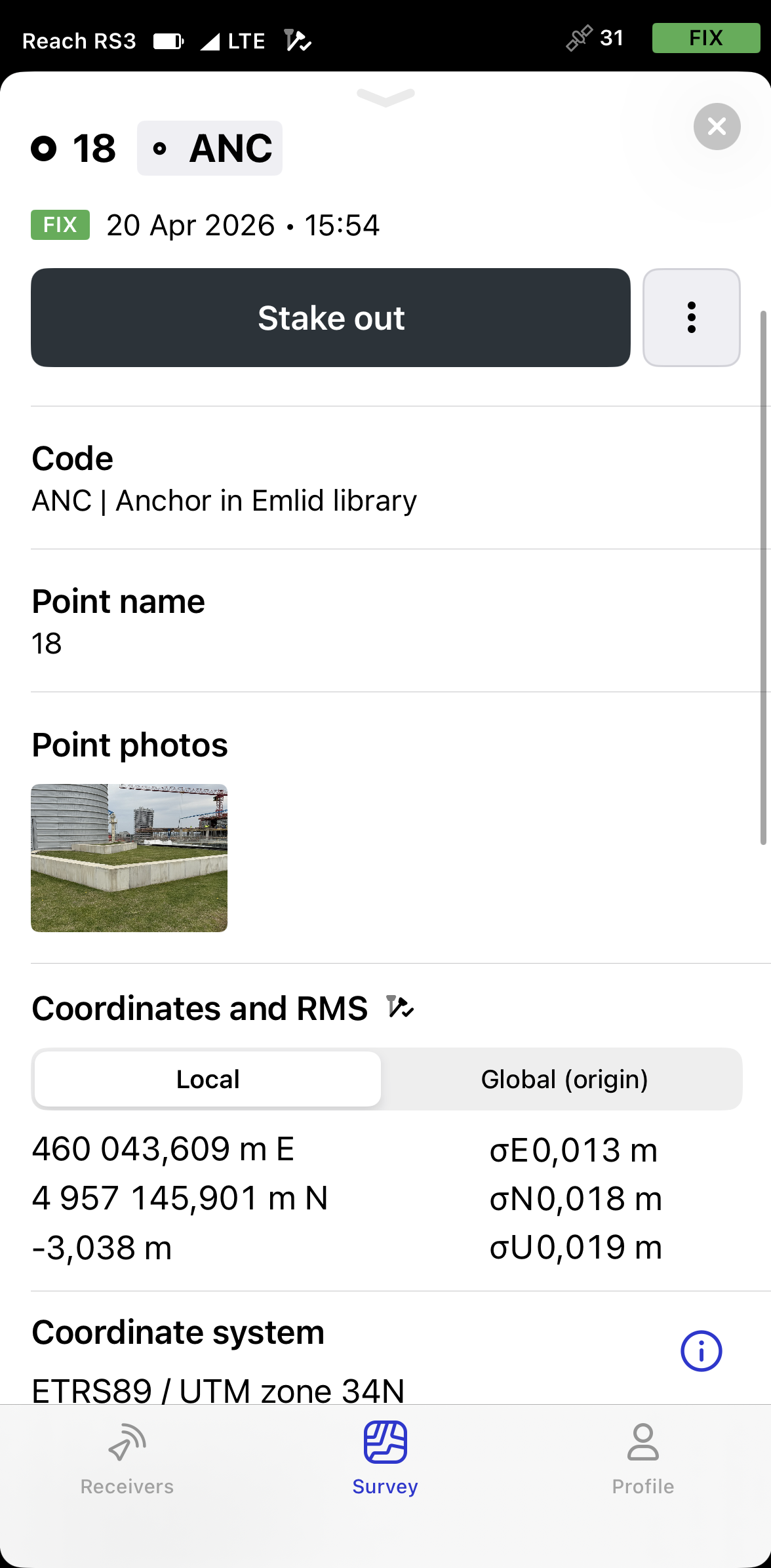
Depois que você coletar o ponto, a foto anexada aparecerá nas informações do ponto. No Android, um ícone de foto também aparecerá ao lado dos pontos com fotos anexadas, tanto na lista de objetos quanto nas informações do ponto. Esse recurso também estará disponível no iOS em breve.
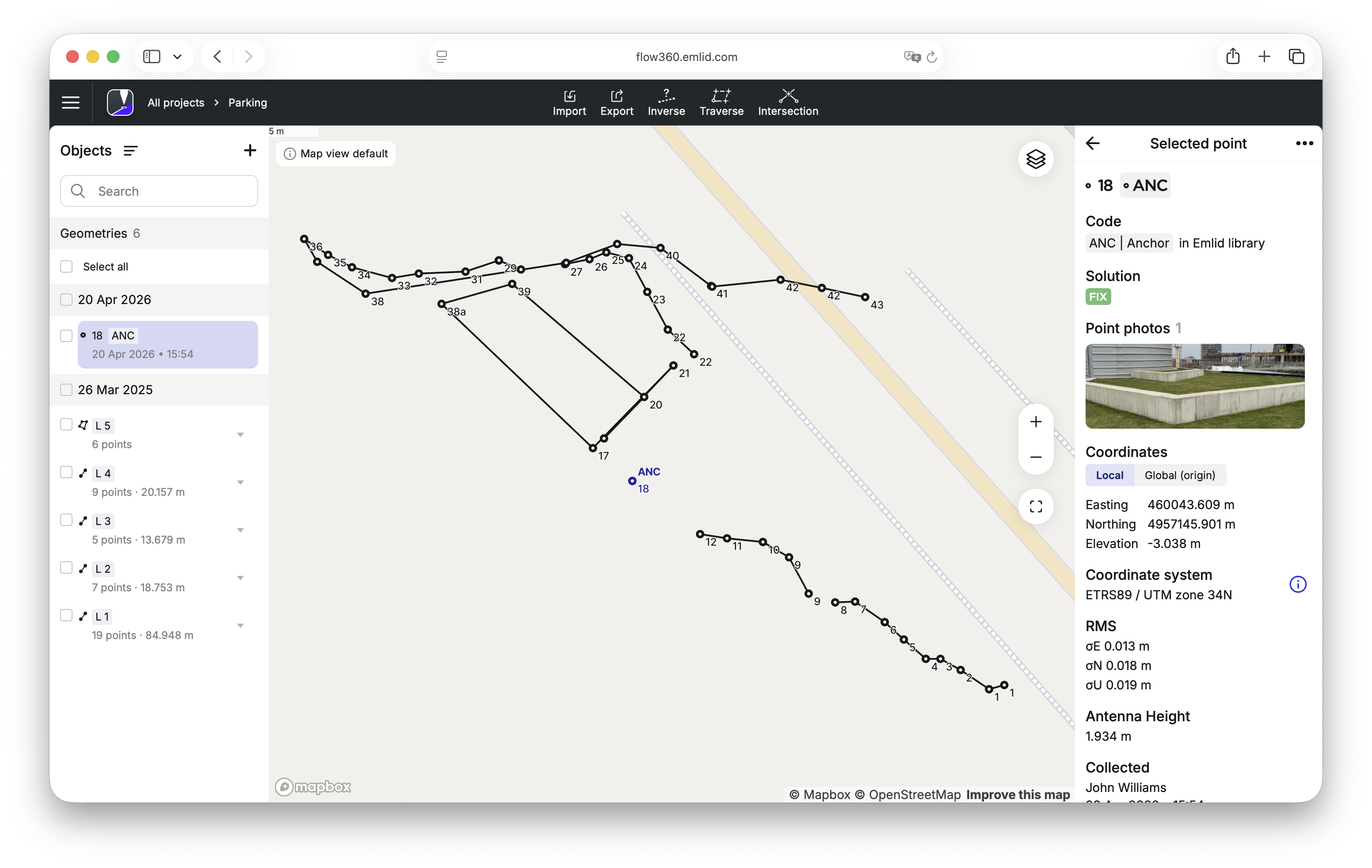
A foto anexada também aparecerá no Emlid Flow 360 quando você estiver conectado à sua conta e tiver uma conexão ativa com a Internet, bastando atualizar a página.
noteSe você adicionar fotos no Android, reinicie o aplicativo Emlid Flow para sincronizá-las com o Emlid Flow 360. Isso será resolvido na próxima versão.
 caution
cautionA exclusão de fotos só está disponível no Emlid Flow.
-
-
Se necessário, renomeie o ponto e adicione uma descrição.
-
Ganhe o ponto tocando no botão Save (Salvar). Uma vez terminado o processo, o ponto coletado aparecerá no mapa.
Agora, você pode continuar coletando pontos para armazenar suas posições no projeto.
Ler mais
- Locação de pontos
- Preparação de relatórios de locação
- [Colocação de GCPs no modo RTK com o Reach RS2/RS2+] (https://docs.emlid.com/reachrs2/tutorials/basics/placing-gcps)
- [Colocação de GCPs no modo RTK com o Reach RX] (https://docs.emlid.com/reachrx/tutorials/basics/placing-gcps)
- [Colocação de GCPs no modo RTK com o Reach RS/RS+] (https://docs.emlid.com/reachrs/tutorials/basics/placing-gcps)