Trabalhando com a base Reach RS4
Este guia mostra como receber correções no Reach RX2 a partir da base Reach RS4 utilizando o Emlid Caster.
Visão geral
Certifique-se de que você seja capaz de fornecer acesso à Internet a ambos os receptores.
Com a ajuda do Emlid NTRIP caster, você pode combinar o Reach RS4 como base e o Reach RX2 rover numa única configuração e passar as correções do Reach RS4 para o Reach RX2 através da Internet.
Saiba mais sobre Emlid Caster.
Fluxo de trabalho
Siga os passos abaixo para receber correções da base do Reach RS4 no seu Reach RX2.
Obter acesso às credenciais NTRIP
Primeiro, é necessário obter as credenciais NTRIP para a base Reach RS4 e para o rover Reach RX2. Siga os passos abaixo:
-
Acesse caster.emlid.com.
-
Inscreva-se ou faça login usando a sua conta Emlid.
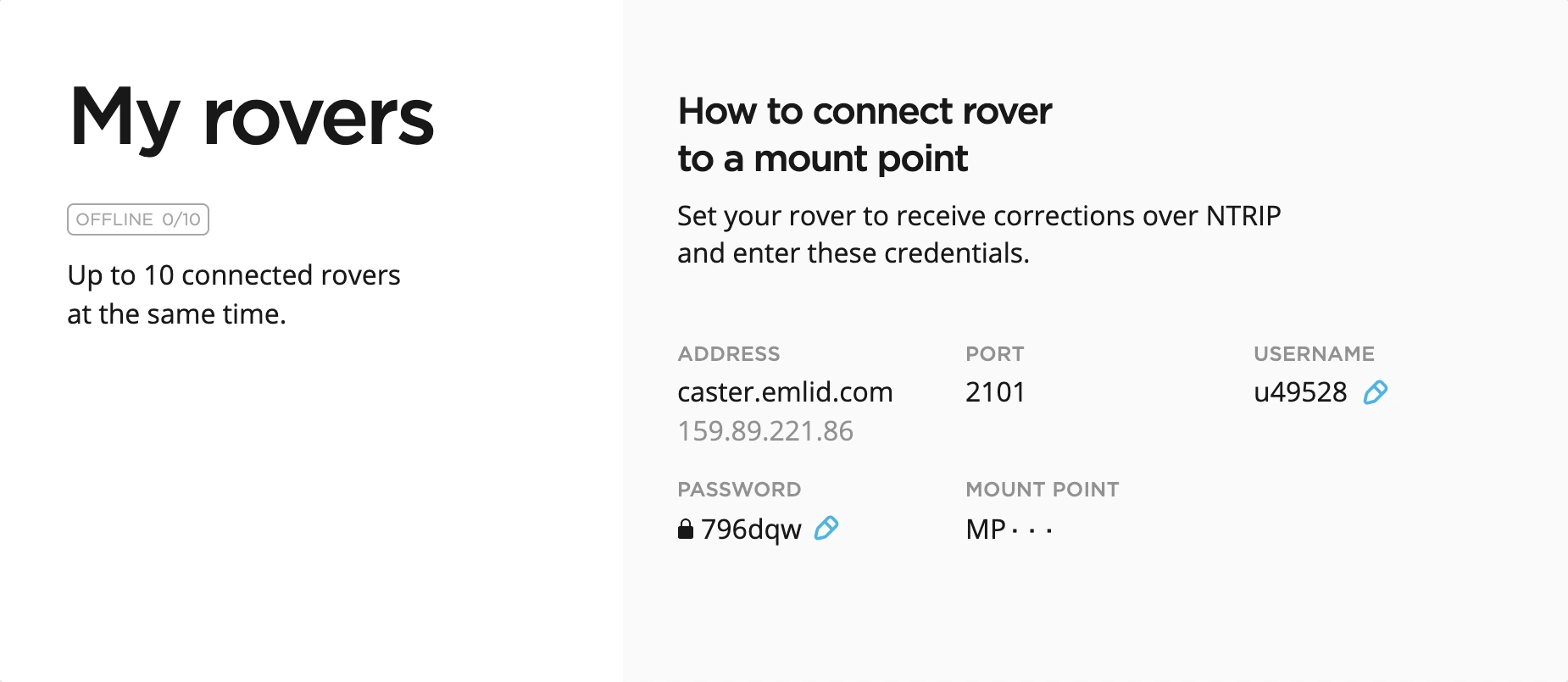
Depois de se registrar, você irá acessar a página com as credenciais NTRIP para a base e para o rover, que são geradas automaticamente. A partir deste momento, você pode utilizar estas credenciais para conectar a base e o rover a uma estação de referência.
Conectar a base a uma estação de referência
Para conectar a base Reach RS4 a uma estação de referência, siga os passos abaixo:
- Ative a estação de referência que você pretende utilizar, ligando o botão de alternância.
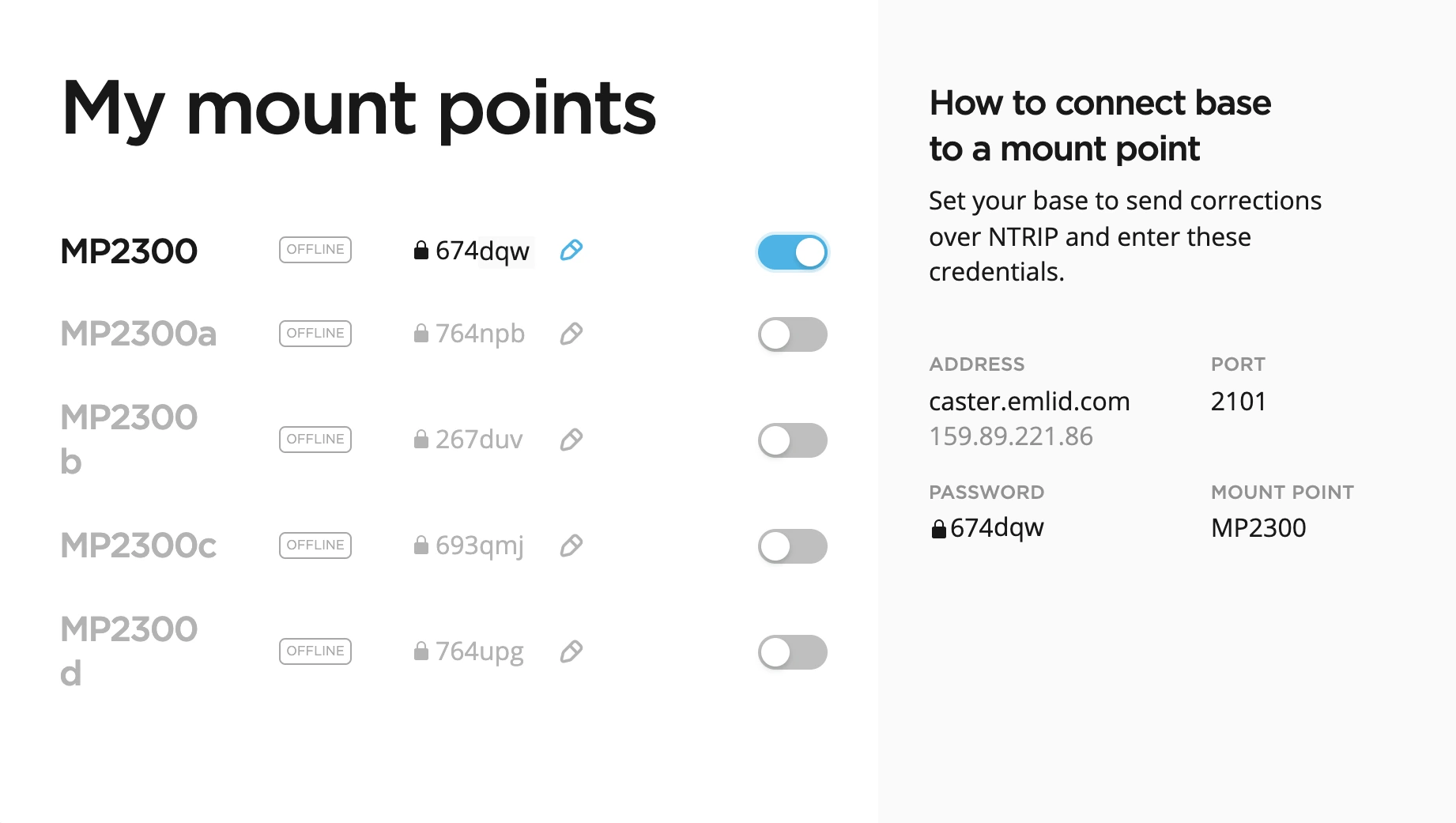
- Conecte-se à sua base através do Emlid Flow, vá para a Base output (Saída da base), e configure-a para enviar correções através do NTRIP utilizando as credenciais obtidas:
- Address
- Port
- Password
- Mount point
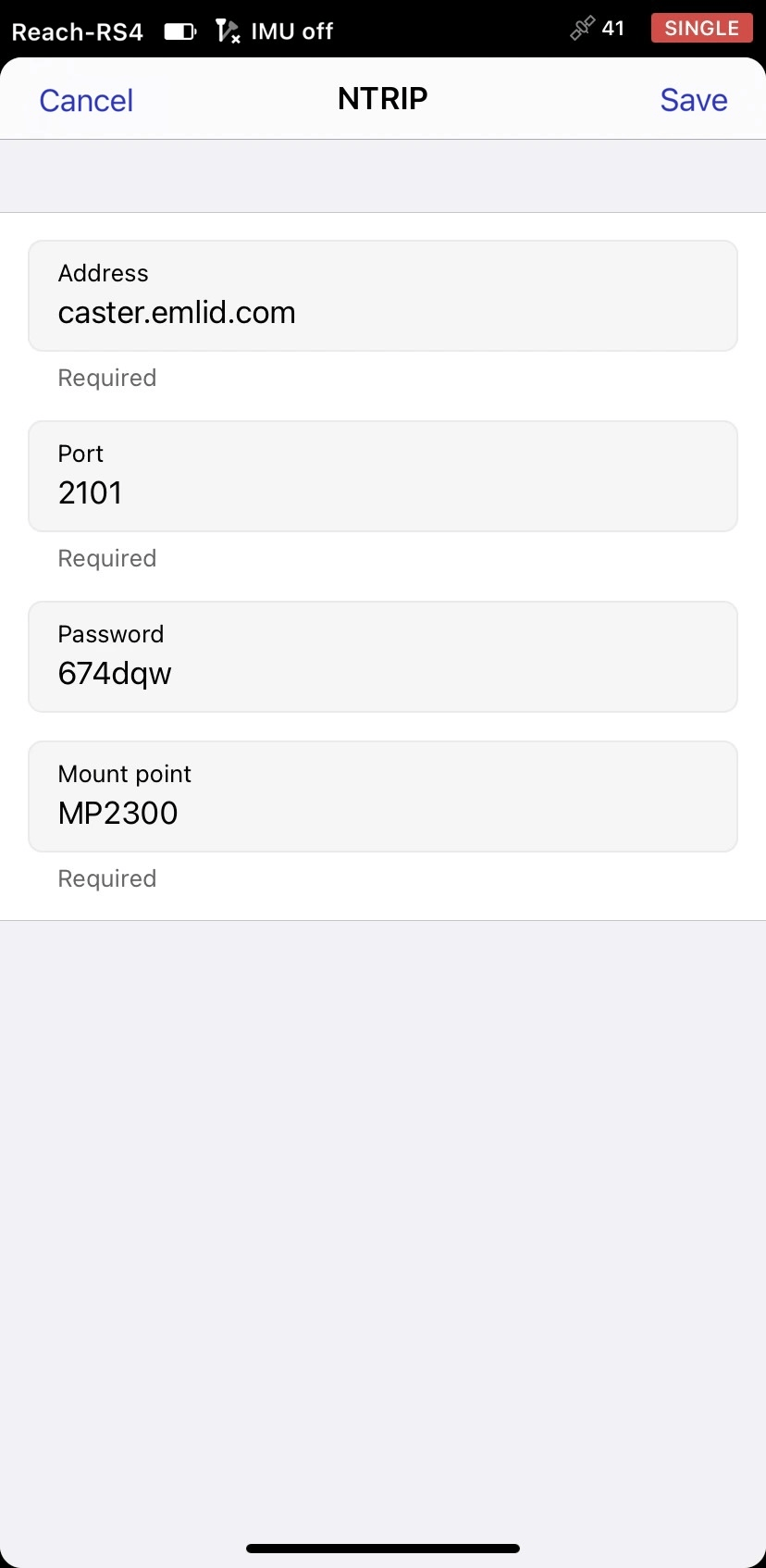
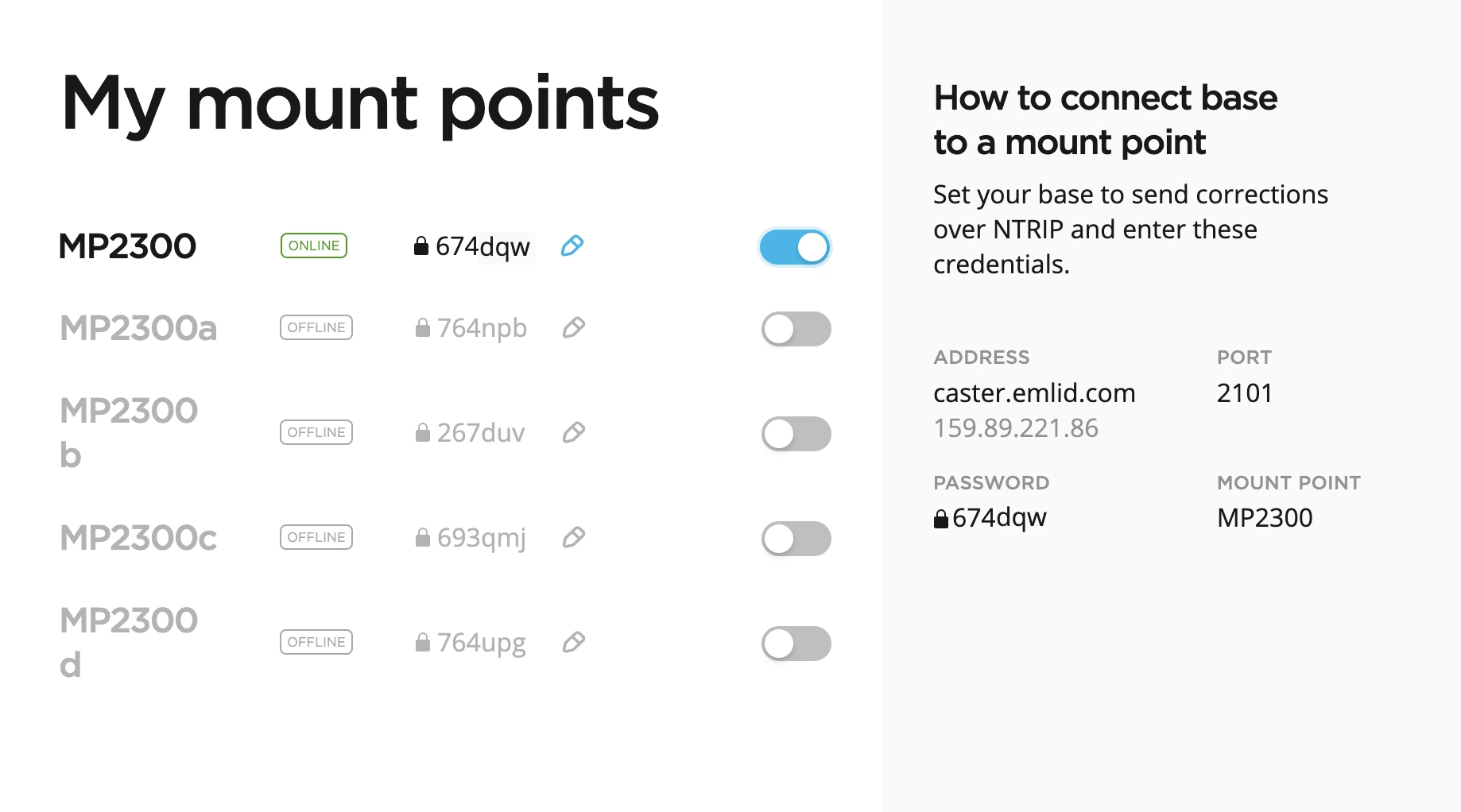
Certifique-se de que configurou a sua base para emitir correções via NTRIP.
Depois de conectar sua base com sucesso, você verá a notificação ONLINE ao lado do nome da estação de referência.
Conecte seu rover a uma estação de referência
Para conectar seu rover Reach RX2 a uma estação de referência, siga os passos abaixo:
- Acesse as credenciais do rover.
Depois de ativar a estação de referência para a base, você vai vê-la nas credenciais do rover.
-
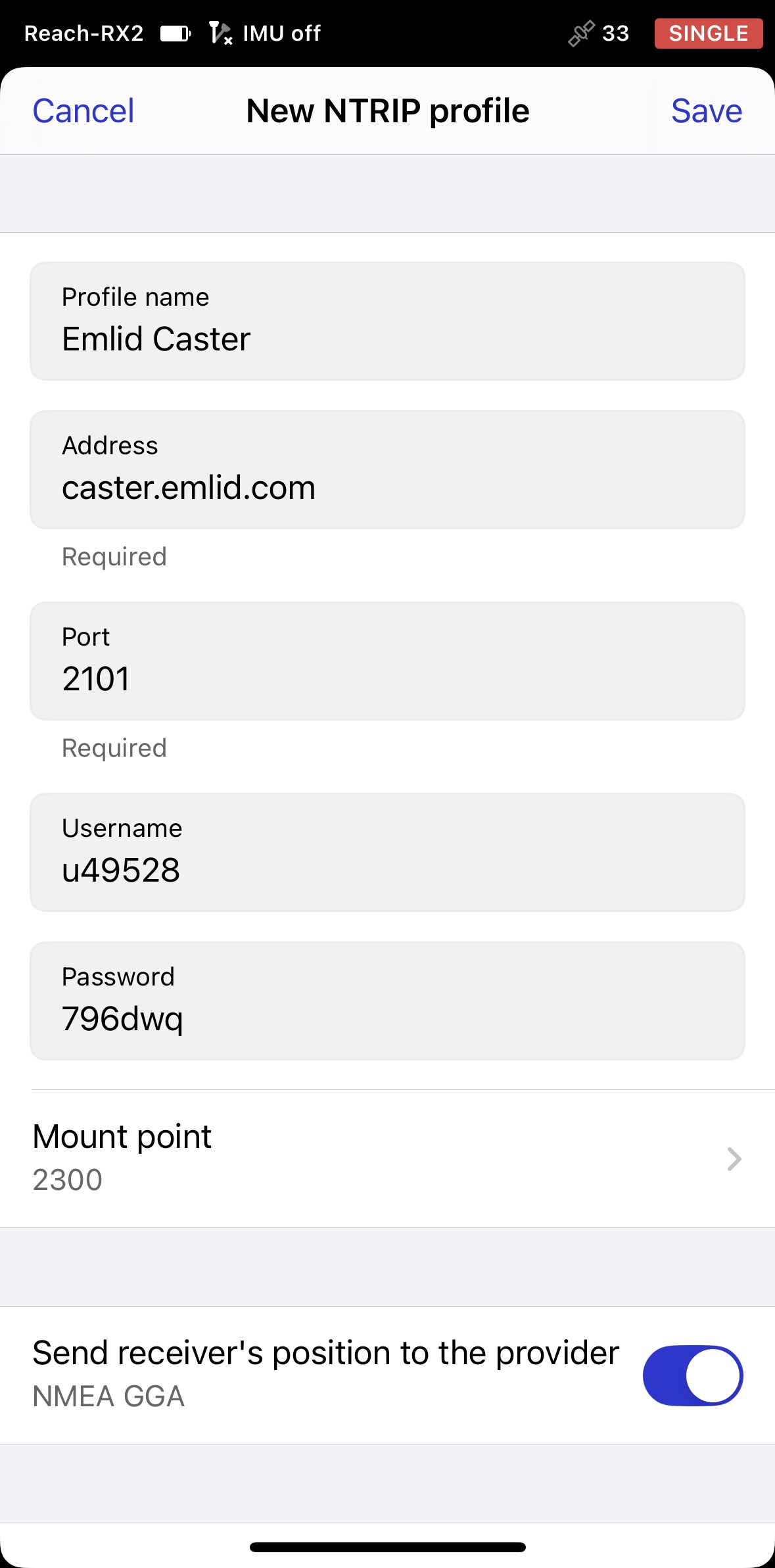
Conecte-se ao seu rover através do Emlid Flow, vá para Correction input (Entrada de correção) e configure-o para obter correções através do NTRIP utilizando as credenciais obtidas para o rover:
- Endereço
- Porta
- Usuário
- Senha
- Estação de referência
Certifique-se de que você configurou o rover para receber as correções da base através do NTRIP.
Se você quiser adicionar mais rovers, repita os passos acima.
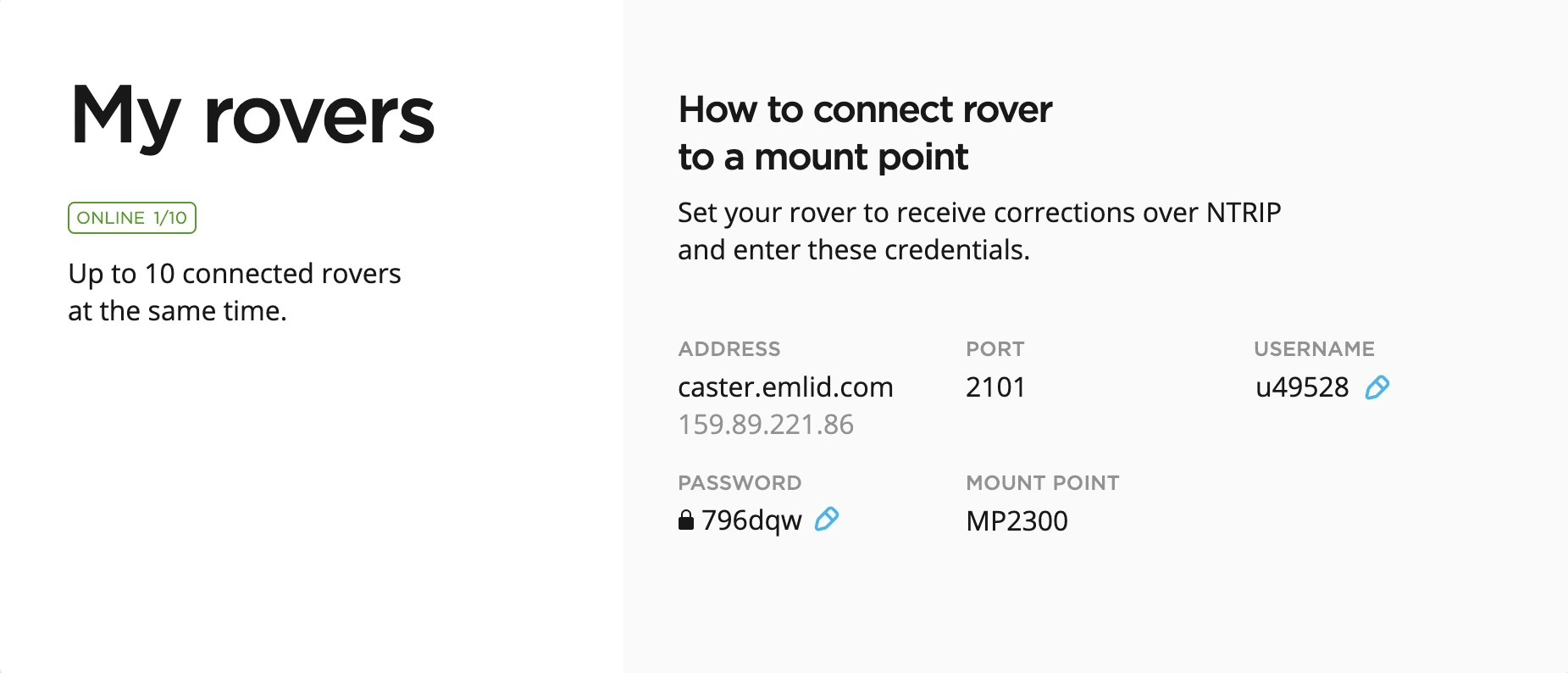
Depois de conectar seu rover com sucesso, você verá a notificação ONLINE e o número de rovers conectados na seção My rovers (Meus rovers).
Para garantir o sucesso da transmissão das correções, verifique novamente as credenciais introduzidas na base e no rover.
Depois que a base e o rover estiverem configurados e conectados à estação de referência, estará tudo pronto para o levantamento.
Colocação
Colocação do rover Reach RX2
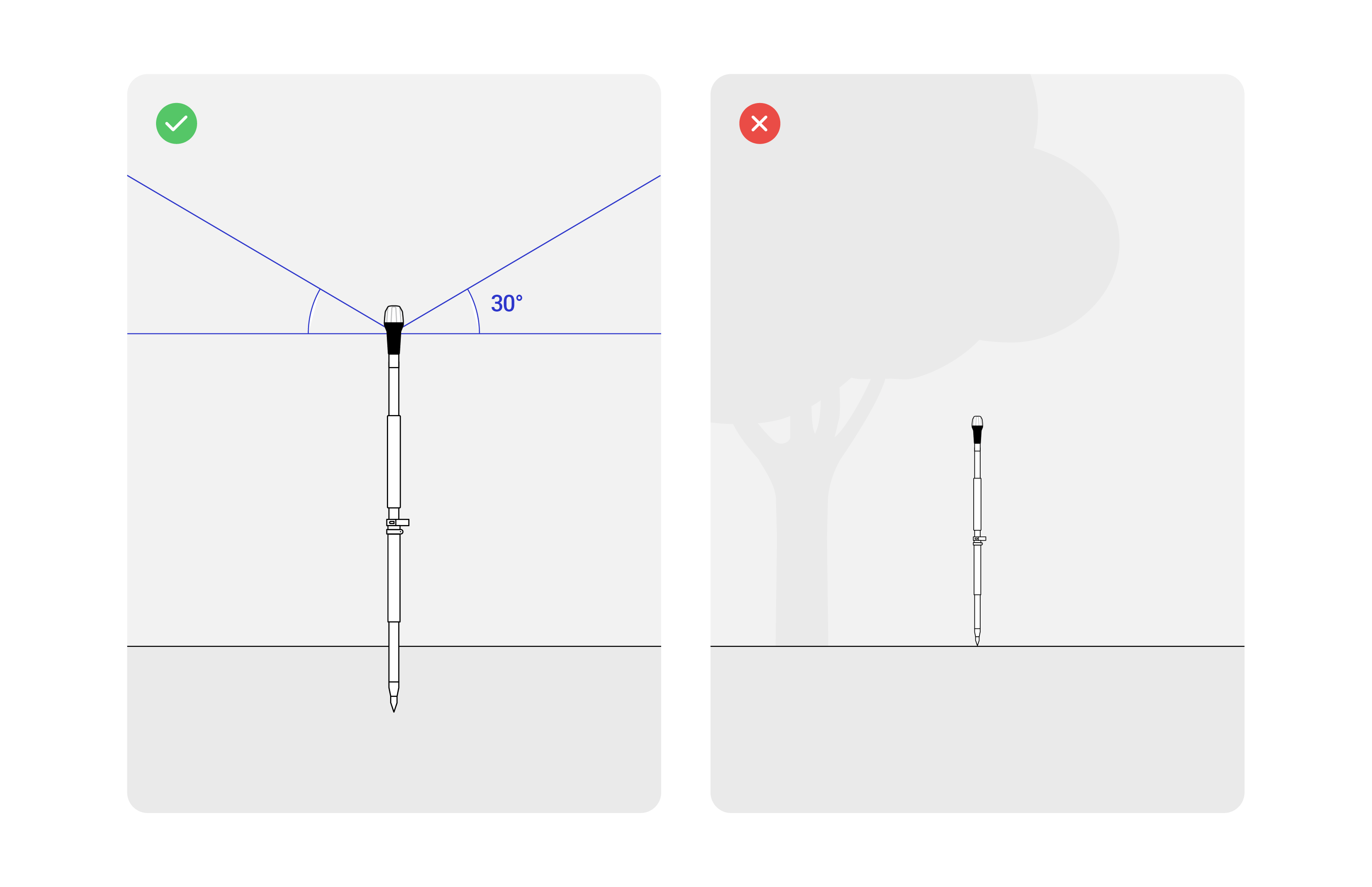
Antes de realizar o levantamento, certifique-se de que seu Reach tenha uma visão clara do céu de, pelo menos, 30° acima do horizonte. Não deve haver obstáculos que possam bloquear a visão, como edifícios, árvores, carros, seres humanos, notebooks, etc.
Colocação da base Reach RS4
Para colocar corretamente a base Reach RS4, consulte os guias a seguir:
Visualizando resultados
Quando tiver concluído a configuração RTK, pode ver o estado atual da solução no canto superior direito da aplicação Emlid Flow ou ver o LED de estado no seu Reach RX2:

SINGLE significa que o Reach encontrou uma solução que depende apenas dos sinais de satélite. Neste caso, a precisão situa-se normalmente no nível métrico.

FLOAT significa que o Reach recebe correções da estação base, mas precisa de mais tempo para calcular a solução. Neste caso, a precisão situa-se normalmente em nível submétrica.

FIX significa que o Reach, usando as correções básicas, calculou uma solução com precisão de centímetros.
O Reach RX2 obtém uma solução fixa num curto espaço de tempo. Em bons ambientes, demorará alguns segundos. Em condições difíceis, pode demorar um pouco mais. Assim que o rover receber o FIX, estará tudo pronto para o levantamento topográfico.
Você também pode ver o status atual da solução, assim como a sua posição em tempo real, na tela Status.