Uso di una base di terze parti
Questa guida mostra come ricevere le correzioni su Reach RX2 da una base di terze parti utilizzando Emlid Caster.
Panoramica
Assicurarsi di poter fornire l'accesso a Internet a entrambi i ricevitori.
Con l'aiuto di Emlid NTRIP caster, è possibile combinare una base di terze parti e un rover Reach RX2 in un'unica configurazione e trasmettere le correzioni dalla base di terze parti al Reach RX2 via Internet.
Per saperne di più su Emlid Caster.
Flusso di lavoro
Seguire i passaggi riportati di seguito per ricevere le correzioni da una base di terze parti sul proprio Reach RX2.
Ottenere l'accesso alle credenziali NTRIP
Innanzitutto, è necessario ottenere le credenziali NTRIP sia per la base di terze parti che per il rover Reach RX2. Seguire i passaggi riportati di seguito:
-
Andare su caster.emlid.com.
-
Registrarsi o accedere utilizzando il proprio account Emlid.
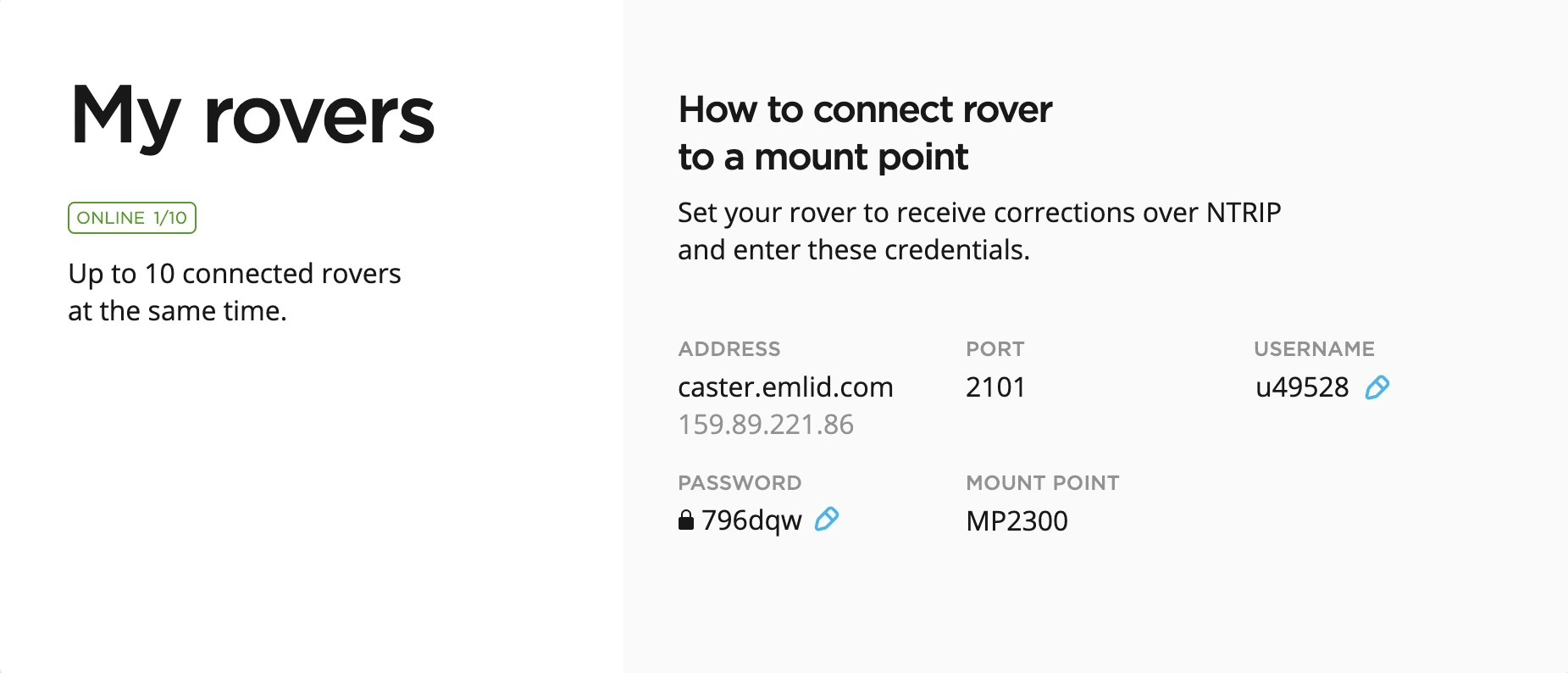
Una volta registrati, si accederà alla pagina con le credenziali NTRIP sia per la base che per il rover, che vengono generate automaticamente. Da questo momento, è possibile utilizzare queste credenziali per collegare la base e il rover a un mount point.
Collegare la base a un punto di montaggio
Per collegare la propria base di terze parti a un punto di montaggio, seguire i passaggi seguenti:
- Attivare il punto di montaggio che si desidera utilizzare attivando il relativo interruttore.
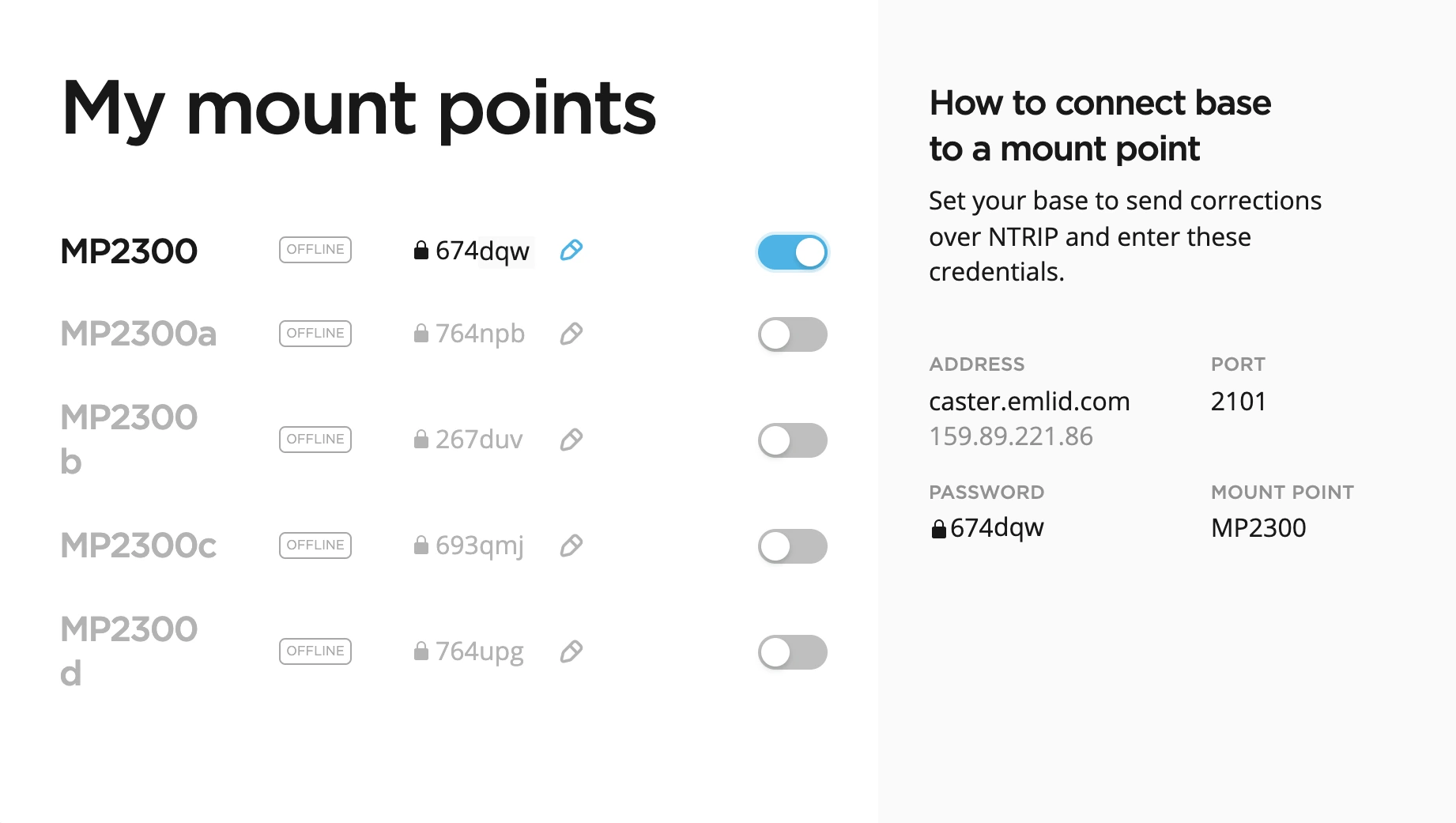
- Configurare la base per inviare le correzioni tramite NTRIP utilizzando le credenziali ottenute:
- Address
- Port
- Password
- Mount point
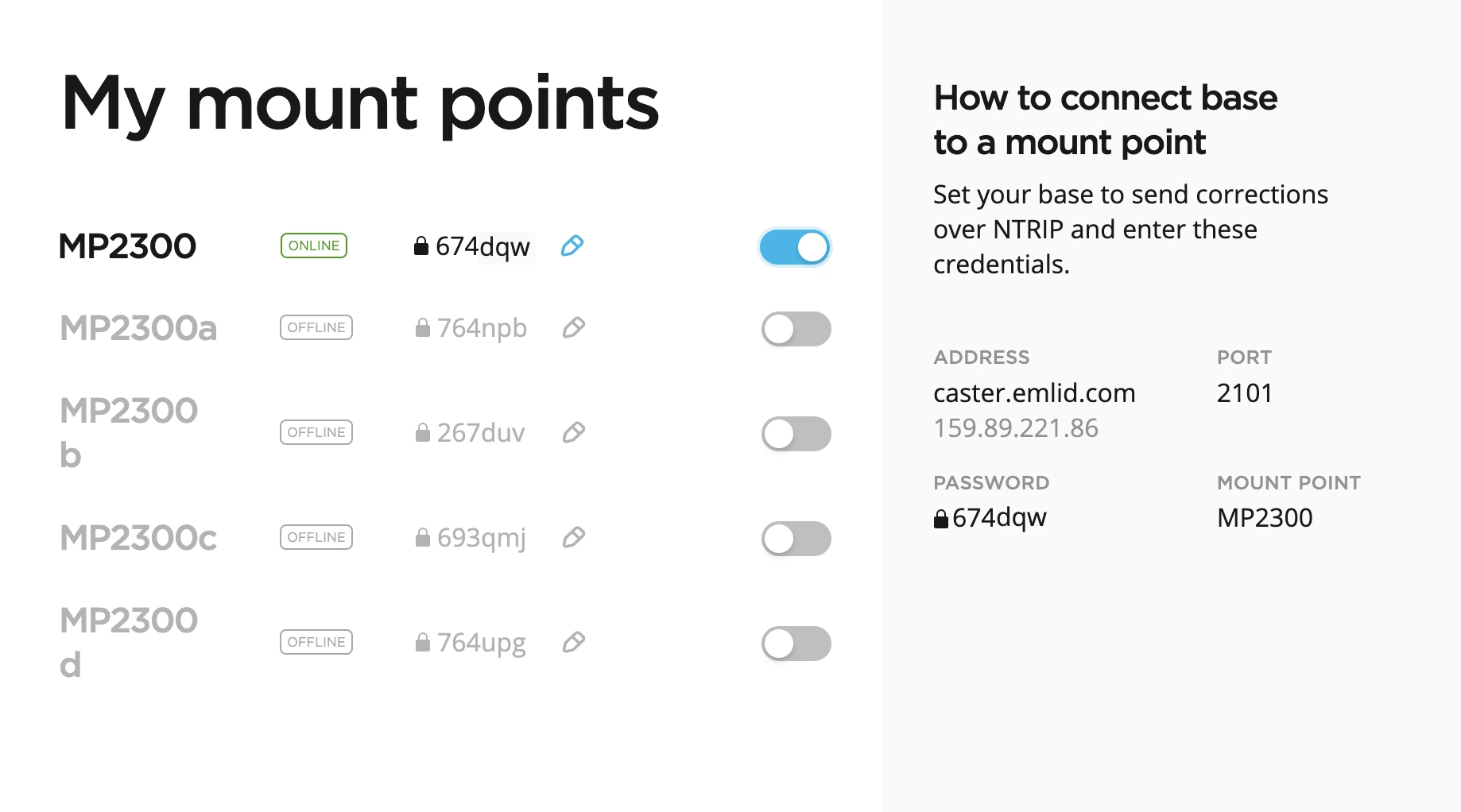
Assicurarsi di aver configurato la base per l'output delle correzioni tramite NTRIP.
Una volta collegata la base, verrà visualizzata la notifica ONLINE accanto al nome del punto di montaggio.
Collegare il rover a un punto di montaggio
Per collegare il proprio Rover Reach RX2 a un mount point, seguire i passaggi seguenti:
- Accedere alle credenziali del rover.
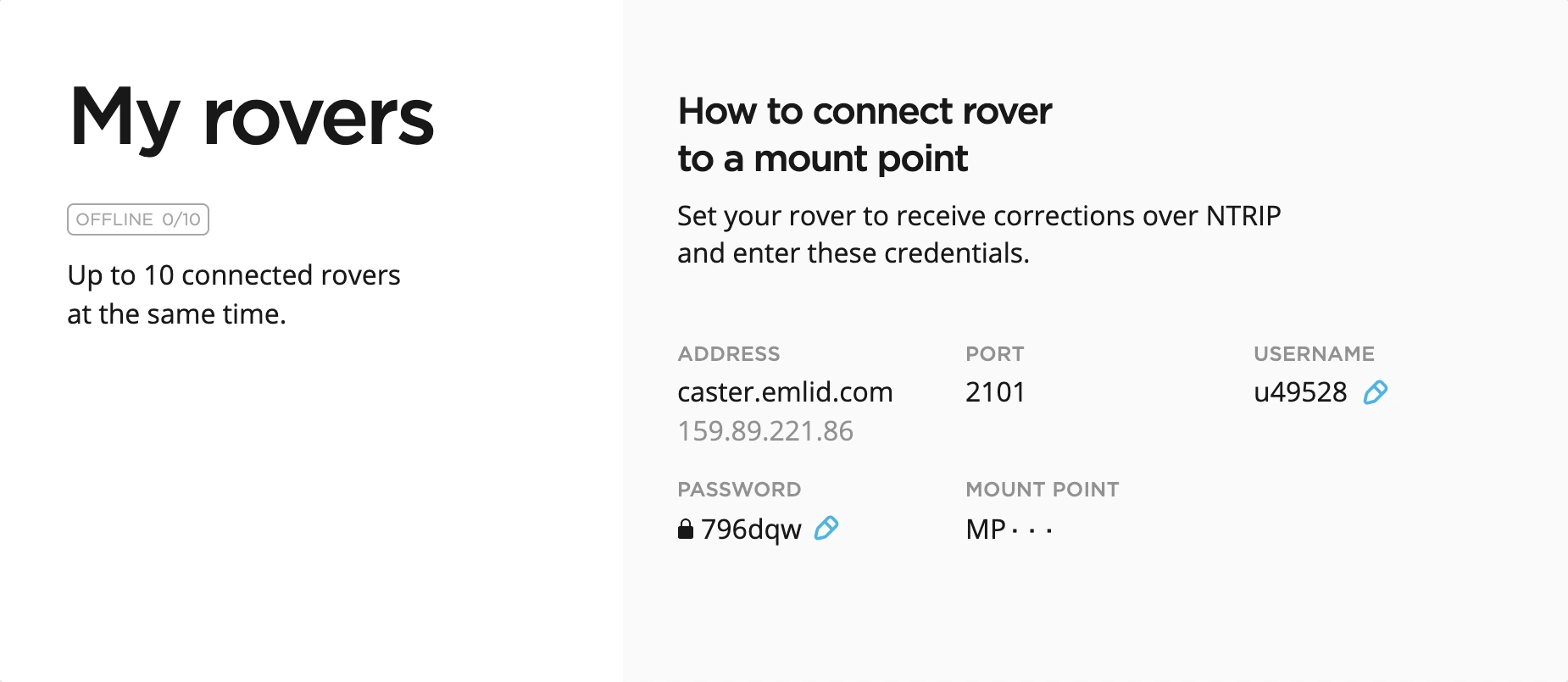
Una volta attivato il punto di montaggio per la base, lo si vedrà nelle credenziali del rover.
-
Collegarsi al proprio rover tramite Emlid Flow, andare su Correction input (Correzione in ingresso) e configurarlo per ricevere le correzioni tramite NTRIP utilizzando le credenziali ottenute per il rover:
- Indirizzo
- Porta
- Nome utente
- Password
- Punto di montaggio
Assicurarsi di aver configurato il rover per ricevere le correzioni dalla base tramite NTRIP.
Se si desidera aggiungere altri rover, ripetere i passaggi precedenti.
Una volta collegato il rover, verrà visualizzata la notifica ONLINE e il numero di rover collegati nella sezione My rovers (I miei rover).
Per garantire una trasmissione corretta delle correzioni, verificare le credenziali inserite sia sulla base che sul rover.
Una volta configurati e collegati sia la base che il rover al punto di montaggio, si è pronti per il rilievo.
Posizionamento
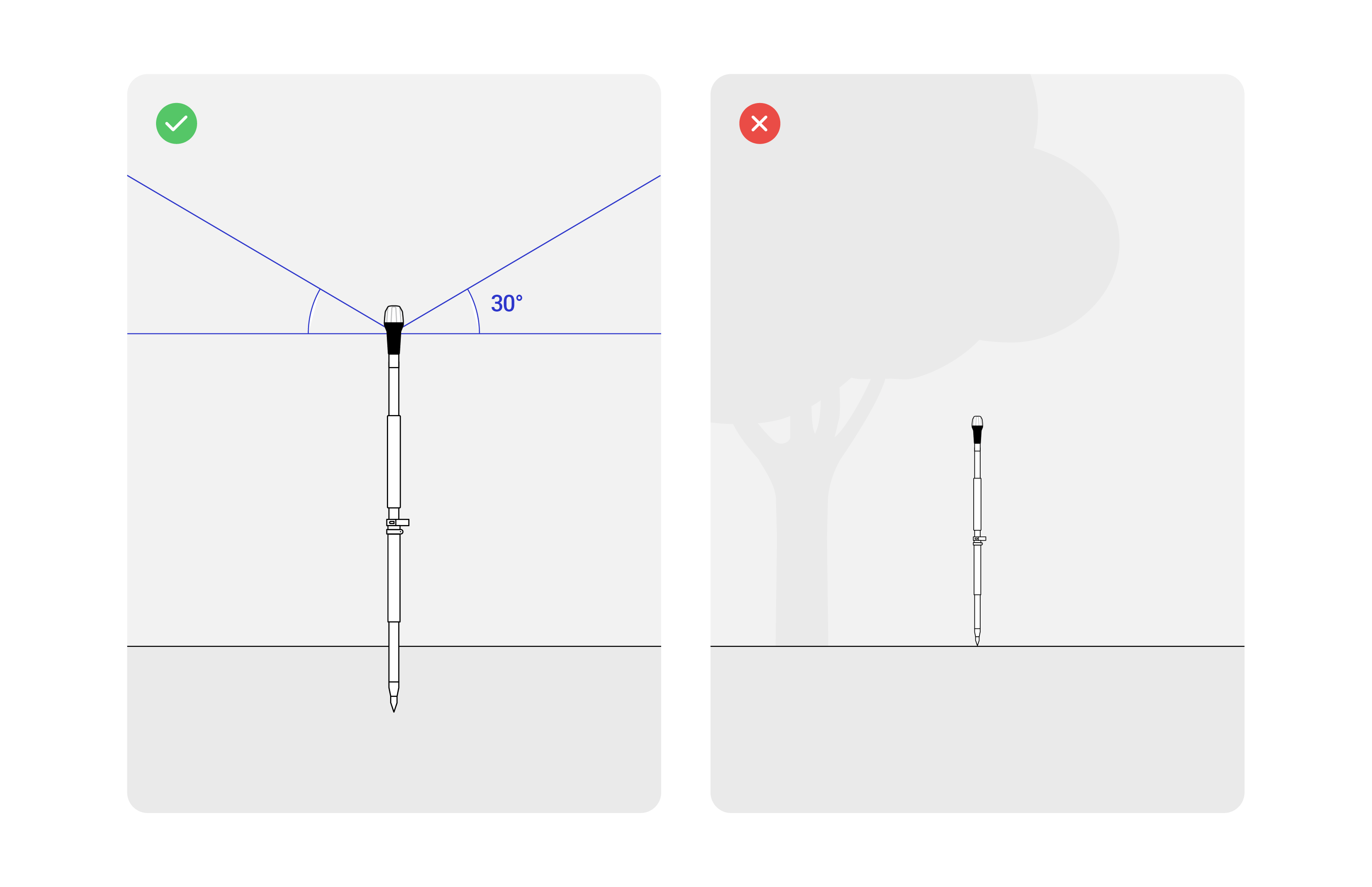
Posizionamento del Rover Reach RX2
Prima di effettuare il rilievo, assicurarsi che il Reach abbia una visuale libera del cielo di almeno 30° sopra l'orizzonte. Non devono essere presenti ostacoli che potrebbero bloccare la visuale, come edifici, alberi, automobili, persone, computer portatili, ecc.
Posizionamento della base di terze parti
Per posizionare correttamente la propria base di terze parti, seguire queste istruzioni:
-
Seguire le istruzioni del produttore della propria base.
-
Assicurarsi che non ci siano ostacoli che possano ostruire la vista, come edifici, alberi, automobili, persone, laptop, ecc.
-
Assicurarsi che non ci siano dispositivi elettronici nelle vicinanze.
Visualizzazione dei risultati
Una volta completata la configurazione RTK, è possibile osservare lo stato attuale della soluzione nell'angolo in alto a destra dell'app Emlid Flow o guardare il LED di stato sul proprio Reach RX2:

SINGLE significa che Reach ha trovato una soluzione basandosi solo sui segnali satellitari. In questo caso, la precisione è solitamente a livello di metro.

FLOAT significa che Reach riceve le correzioni dalla stazione base, ma ha bisogno di più tempo per calcolare la soluzione. In questo caso, la precisione è solitamente a livello submetrico.

FIX significa che Reach, utilizzando le correzioni della base, ha calcolato una soluzione con precisione centimetrica.
Reach RX2 ottiene una soluzione fissa in un breve periodo di tempo. In ambienti favorevoli, ci vorranno pochi secondi. In condizioni difficili, potrebbe essere necessario un po' più di tempo. Una volta che il rover ottiene lo stato FIX, si è pronti per il rilievo.
È inoltre possibile trovare lo stato corrente della soluzione e la propria posizione in tempo reale nella schermata Status (Stato).