Travailler avec une station de base tierce
Ce guide montre comment recevoir des corrections sur Reach RX2 à partir d'une station de base tierce en utilisant Emlid Caster.
Vue d'ensemble
Assurez-vous de pouvoir fournir un accès Internet aux deux récepteurs.
Avec l'aide du caster NTRIP Emlid, vous pouvez combiner une base tierce et un rover Reach RX2 dans une seule installation et transmettre les corrections de la base tierce à Reach RX2 via Internet.
Apprenez-en plus sur Emlid Caster.
Flux de travail
Suivez les étapes ci-dessous pour recevoir des corrections de la station de base tierce sur votre Reach RX2.
Accéder aux identifiants NTRIP
Tout d'abord, vous devez obtenir vos identifiants NTRIP pour la station de base tierce et le rover Reach RX2. Suivez les étapes ci-dessous :
-
Allez sur caster.emlid.com.
-
Inscrivez-vous ou connectez-vous en utilisant votre compte Emlid.
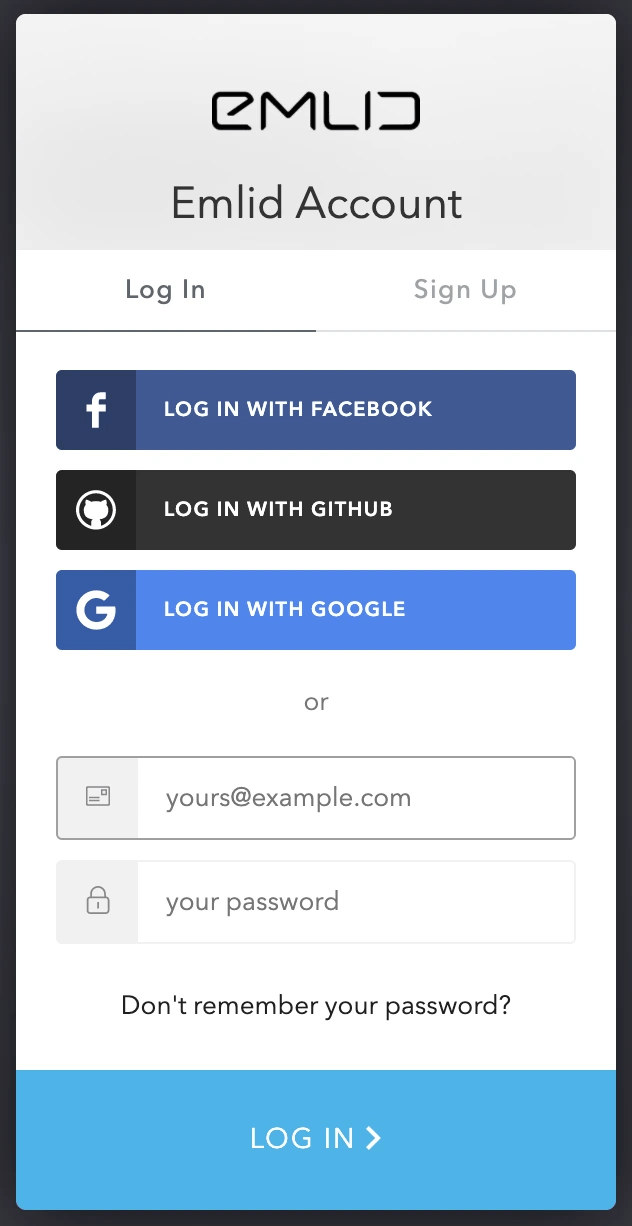
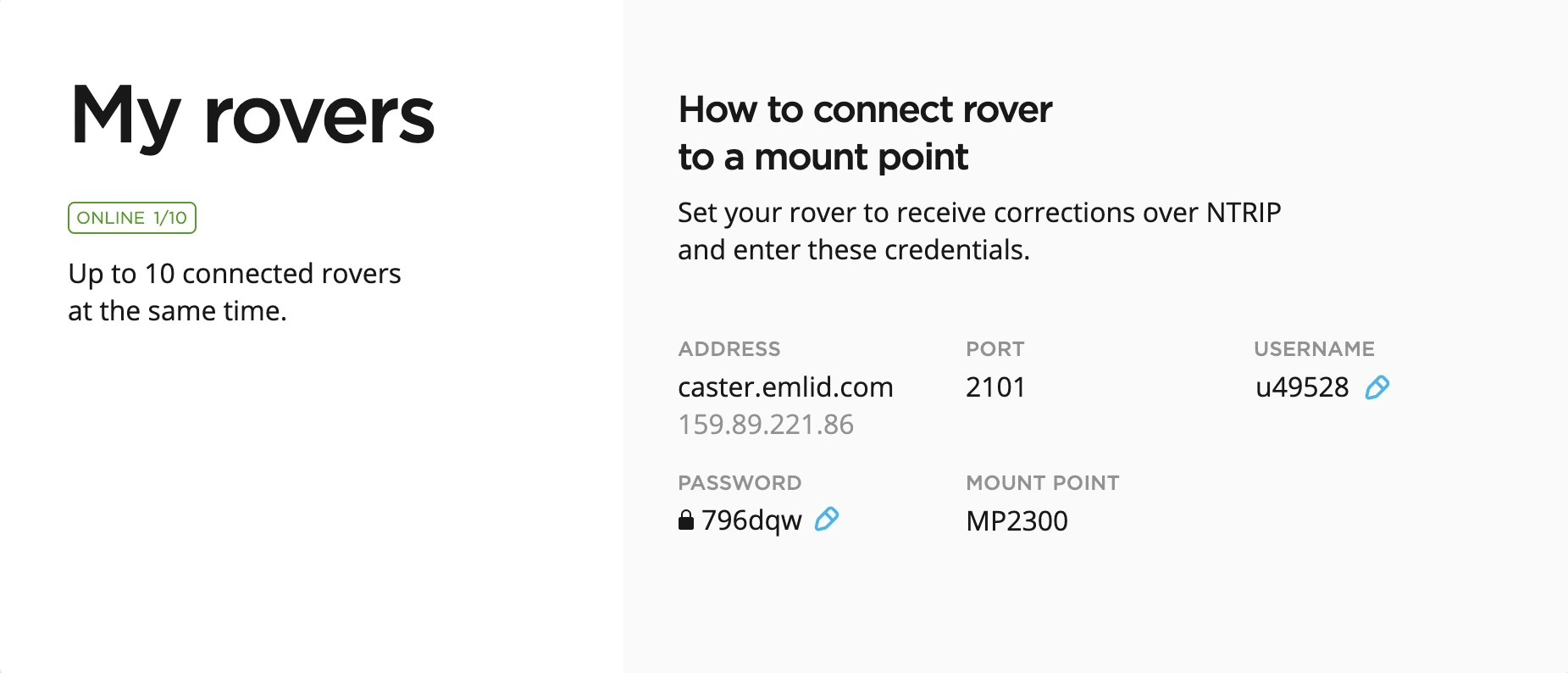
Une fois inscrit, vous accéderez à la page avec les identifiants NTRIP pour la station de base et le rover, qui sont générés automatiquement. À partir de ce moment, vous pouvez utiliser ces identifiants pour connecter votre base et votre rover à un point de montage.
Connecter la station de base à un point de montage
Pour connecter votre station de base tierce à un point de montage, suivez les étapes ci-dessous :
- Activez le point de montage que vous souhaitez utiliser en activant l'interrupteur.
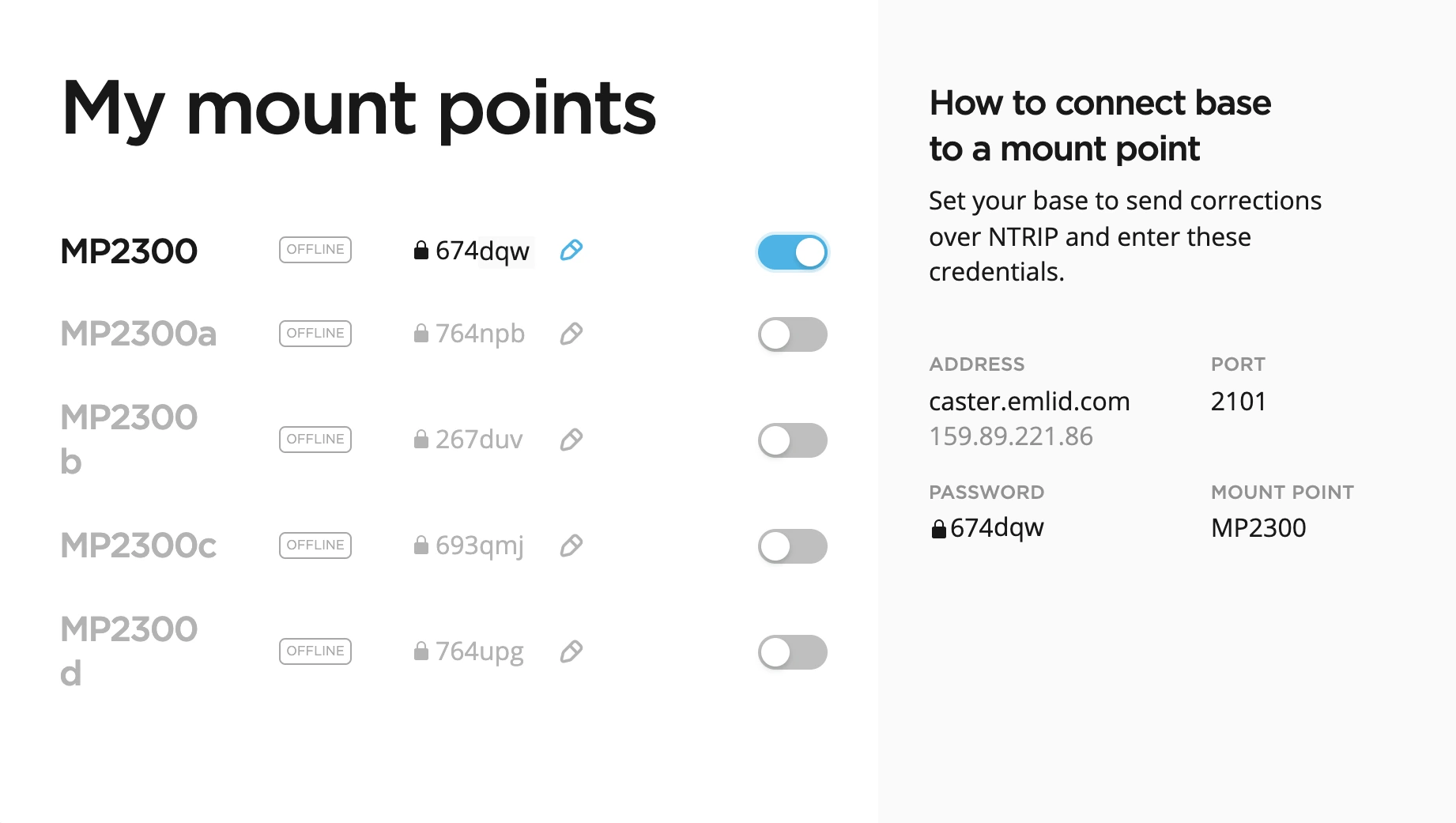
- Configurez votre base pour envoyer des corrections via NTRIP en utilisant les identifiants obtenus :
- Address
- Port
- Password
- Mount point
Assurez-vous d'avoir configuré votre base pour émettre des corrections via NTRIP.
Une fois que vous avez connecté votre base avec succès, vous verrez la notification ONLINE (EN LIGNE) à côté du nom du point de montage.
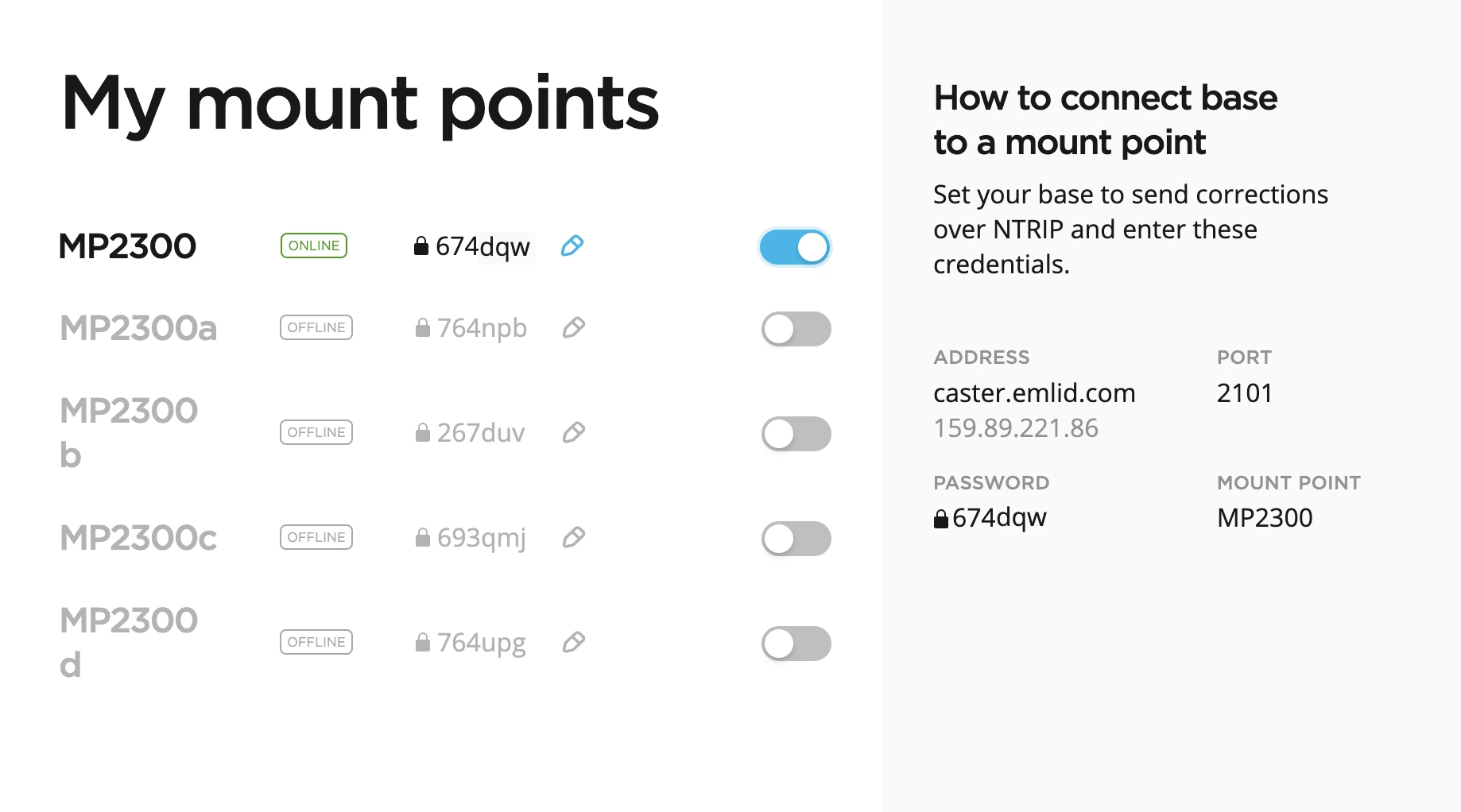
Connecter votre rover à un point de montage
Pour connecter votre rover Reach RX2 à un point de montage, suivez les étapes ci-dessous :
- Accédez aux identifiants du rover.
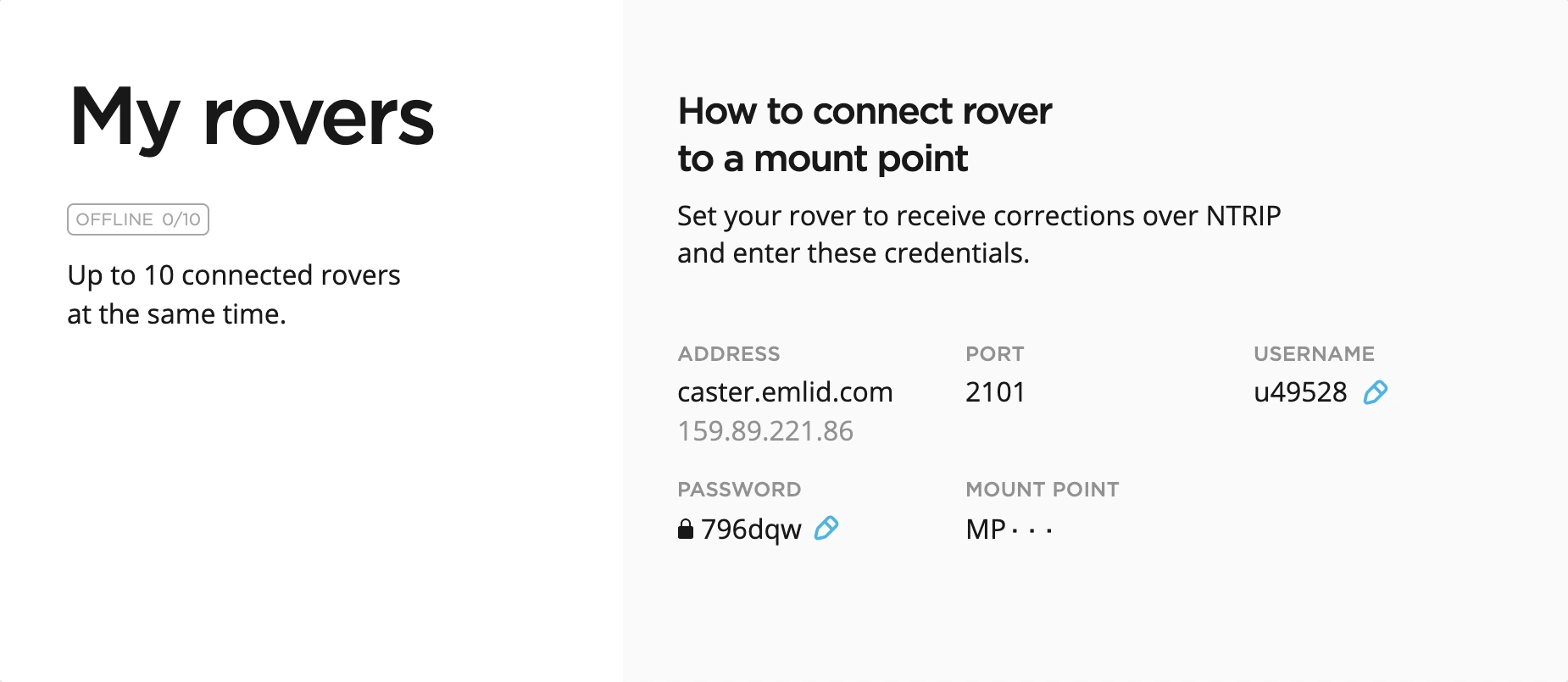
Une fois que vous activez le point de montage pour la base, vous le verrez dans les identifiants du rover.
-
Connectez-vous à votre rover via Emlid Flow, allez dans Correction input (Entrée de correction), et configurez-le pour obtenir des corrections via NTRIP en utilisant les identifiants obtenus pour le rover :
- Adresse
- Port
- Nom d'utilisateur
- Mot de passe
- Point de montage
Assurez-vous d'avoir configuré votre rover pour recevoir des corrections de la base via NTRIP.
Si vous souhaitez ajouter plus de rovers, répétez les étapes ci-dessus.
Une fois votre rover connecté avec succès, vous verrez la notification ONLINE (EN LIGNE) et le nombre de rovers connectés dans la section My rovers (Mes rovers).
Pour vous assurer que la transmission des corrections est réussie, vérifiez à nouveau les identifiants que vous avez entrés sur la base et le rover.
Lorsque vous avez configuré et connecté la station de base et le rover au point de montage, vous êtes prêt pour l'arpentage.
Placement
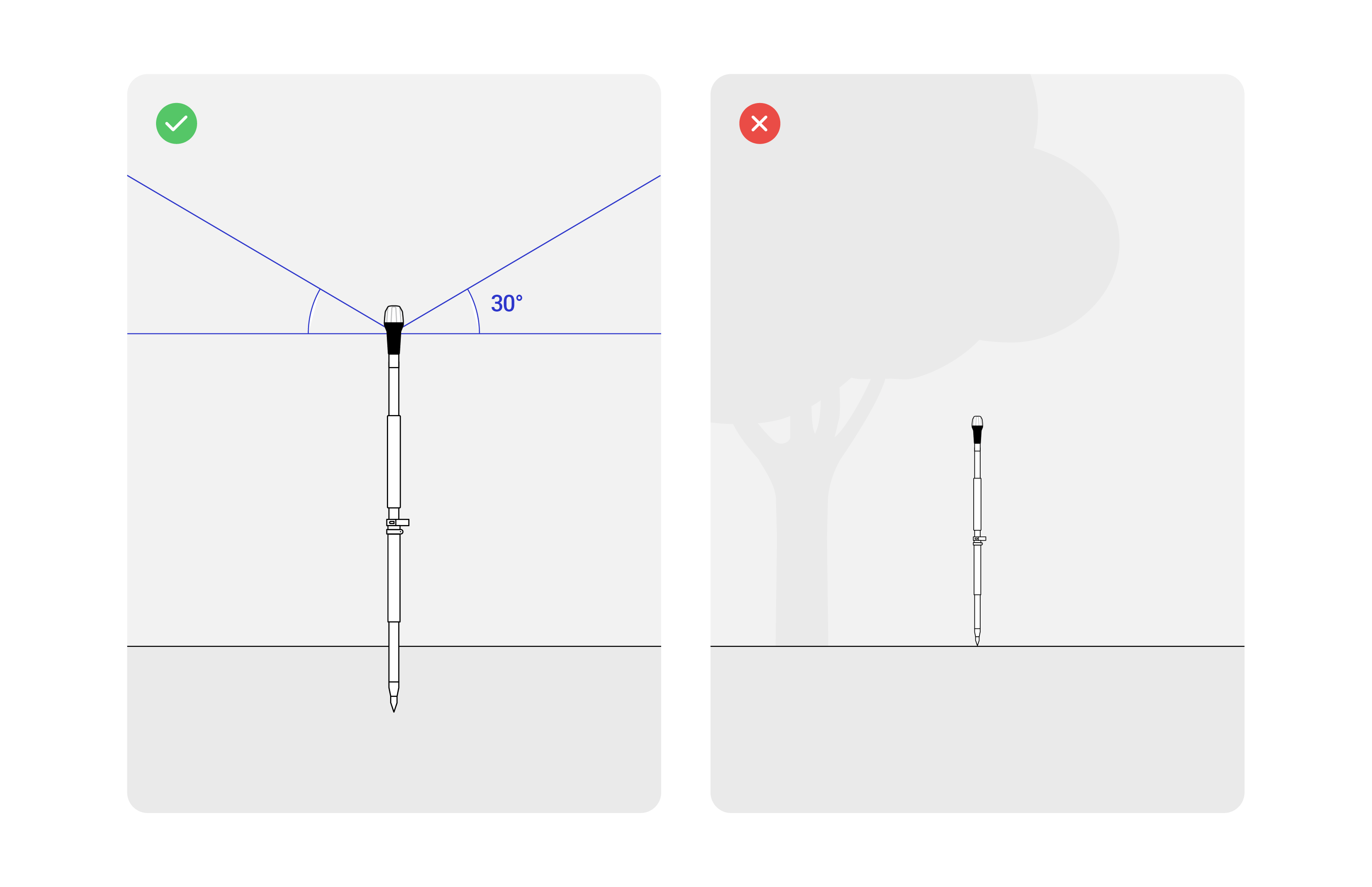
Placement du rover Reach RX2
Avant de faire des relevés, assurez-vous que votre Reach a une vue dégagée du ciel d'au moins 30° au-dessus de l'horizon. Il ne doit y avoir aucun obstacle pouvant bloquer la vue comme des bâtiments, des arbres, des voitures, des humains, des ordinateurs portables, etc.
Placement de la station de base tierce
Pour placer correctement votre station de base tierce, suivez ces instructions :
-
Suivez les instructions du fabricant de votre station de base.
-
Assurez-vous qu'il n'y a pas d'obstacles qui pourraient bloquer la vue comme des bâtiments, des arbres, des voitures, des humains, des ordinateurs portables, etc.
-
Veillez à ce qu'il n'y ait pas d'appareils électroniques à proximité.
Affichage des résultats
Lorsque vous avez terminé votre configuration RTK, vous pouvez regarder l'état actuel de la solution dans le coin supérieur droit de l'application Emlid Flow ou regarder le voyant d'état sur votre Reach RX2 :

SINGLE signifie que Reach a trouvé une solution en ne s'appuyant que sur les signaux satellites. Dans ce cas, la précision est généralement au niveau du mètre.

FLOAT signifie que Reach reçoit des corrections de la station de base mais a besoin de plus de temps pour calculer la solution. Dans ce cas, la précision est généralement de moins d'un mètre.

FIX signifie que Reach a calculé une solution avec une précision centimétrique avec les corrections de base.
Reach RX2 obtient une solution fixe dans un court laps de temps. Dans de bons environnements, cela prendra quelques secondes. Dans des conditions difficiles, cela peut prendre un peu plus de temps. Une fois que le rover obtient FIX, vous êtes prêt pour les relevés.
Vous pouvez également trouver l'état actuel de la solution ainsi que votre position en temps réel sur l'écran Status (État).