Integração de base do Autel EVO II Enterprise e Reach RS2/RS2+
Este guia mostra como configurar o Reach RS2/RS2+ como uma base para o drone Autel EVO II Enterprise para georeferenciar imagens de drones para mapeamento posterior em software de fotogrametria.
Também é possível utilizar o drone Autel EVO II RTK Series com a base Reach RS2/RS2+.
Saiba mais sobre RTK e PPK nos guias abaixo:
Visão geral
O Autel EVO II Enterprise utiliza NTRIP para receber correções, o que lhe permite utilizar o Reach como uma estação de base. O Reach pode enviar correções NTRIP através do Emlid Caster através da Internet ou utilizando a opção Local NTRIP no Emlid Flow sem conexão à Internet.
Para utilizar a opção Local NTRIP, a base e o rover devem estar conectados à mesma rede Wi-Fi.
Para configurar o seu Reach como uma base para o drone Autel EVO II Enterprise, você vai precisar do seguinte:
- Drone Autel EVO II Enterprise como rover
- Controlador
- Reach RS2/RS2+ como base
- Um smartphone ou tablet com a aplicação Emlid Flow instalada
- Conexão à Internet no Reach RS2/RS2+ e no Autel Smart Controller se você usa o Emlid Caster
- Acesso ao Emlid Caster
Fluxo de trabalho
Configure o Reach RS2/RS2+ como base
O Reach RS2/RS2+ pode enviar correções NTRIP através do Emlid Caster ou utilizando a opção Local NTRIP no Emlid Flow. A diferença é que o Emlid Caster requer uma conexão à Internet e o Local NTRIP permite configurar o RTK sem uma conexão à Internet. Selecione o método de acordo com o seu caso de uso e siga os passos abaixo.
Configure o Reach RS2/RS2+ como base utilizando o NTRIP local
Para configurar o seu Reach como uma base para o drone Autel EVO II Enterprise utilizando a opção Local NTRIP no Emlid Flow, siga os passos abaixo:
-
Coloque o seu Reach no tripé e garanta que ele tenha uma visão limpa do céu.
tipSaiba mais sobre o posicionamento da base nos artigos Colocação e Escolhendo um método para instalação da base.
-
Abra o Emlid Flow e conecte-se ao seu Reach.
-
Toque em Saída da base (Base output) e selecione a opção Local NTRIP.
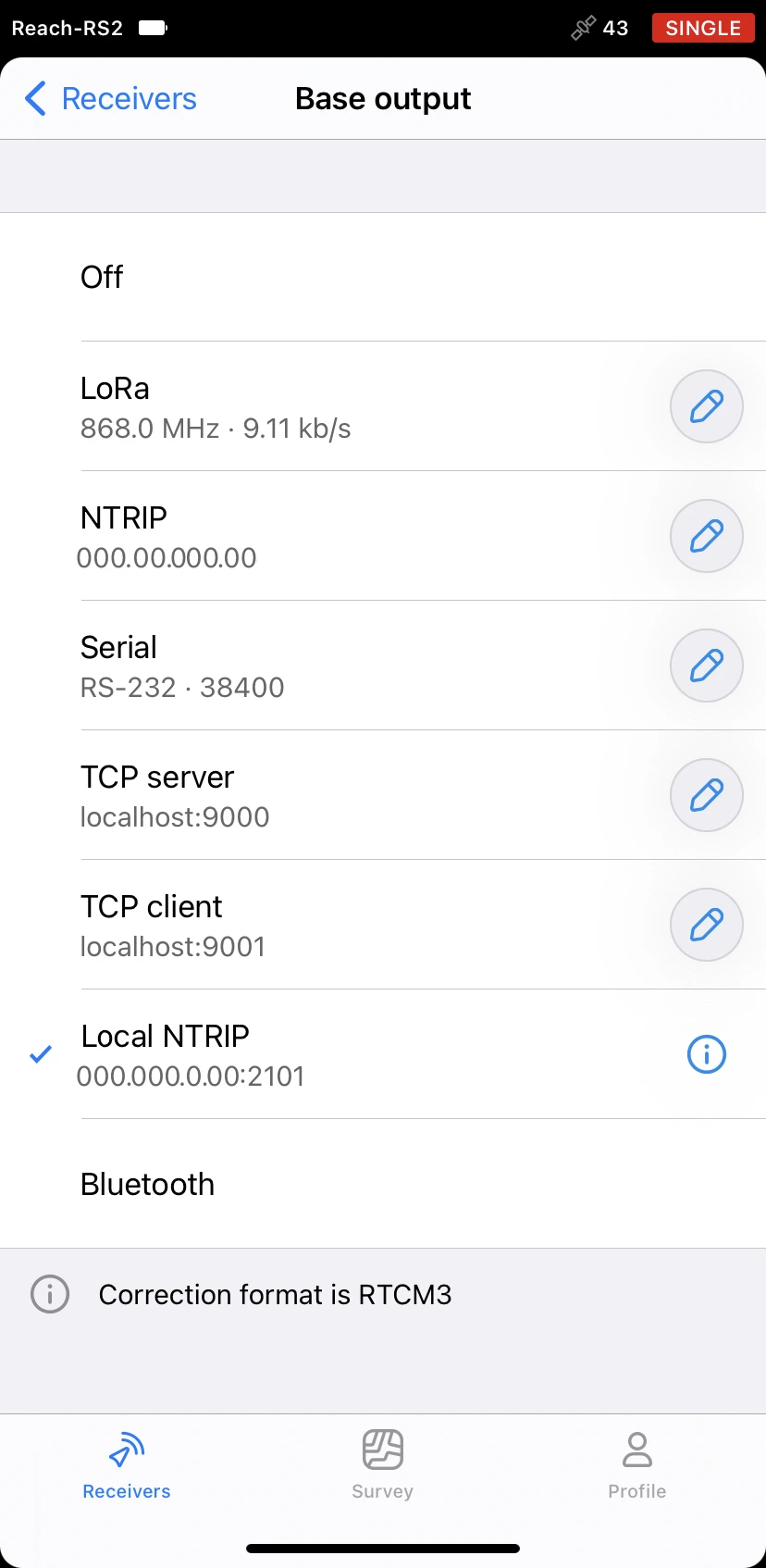
-
Toque no botão Informações (Information) para acessar a página com as credenciais do rover.
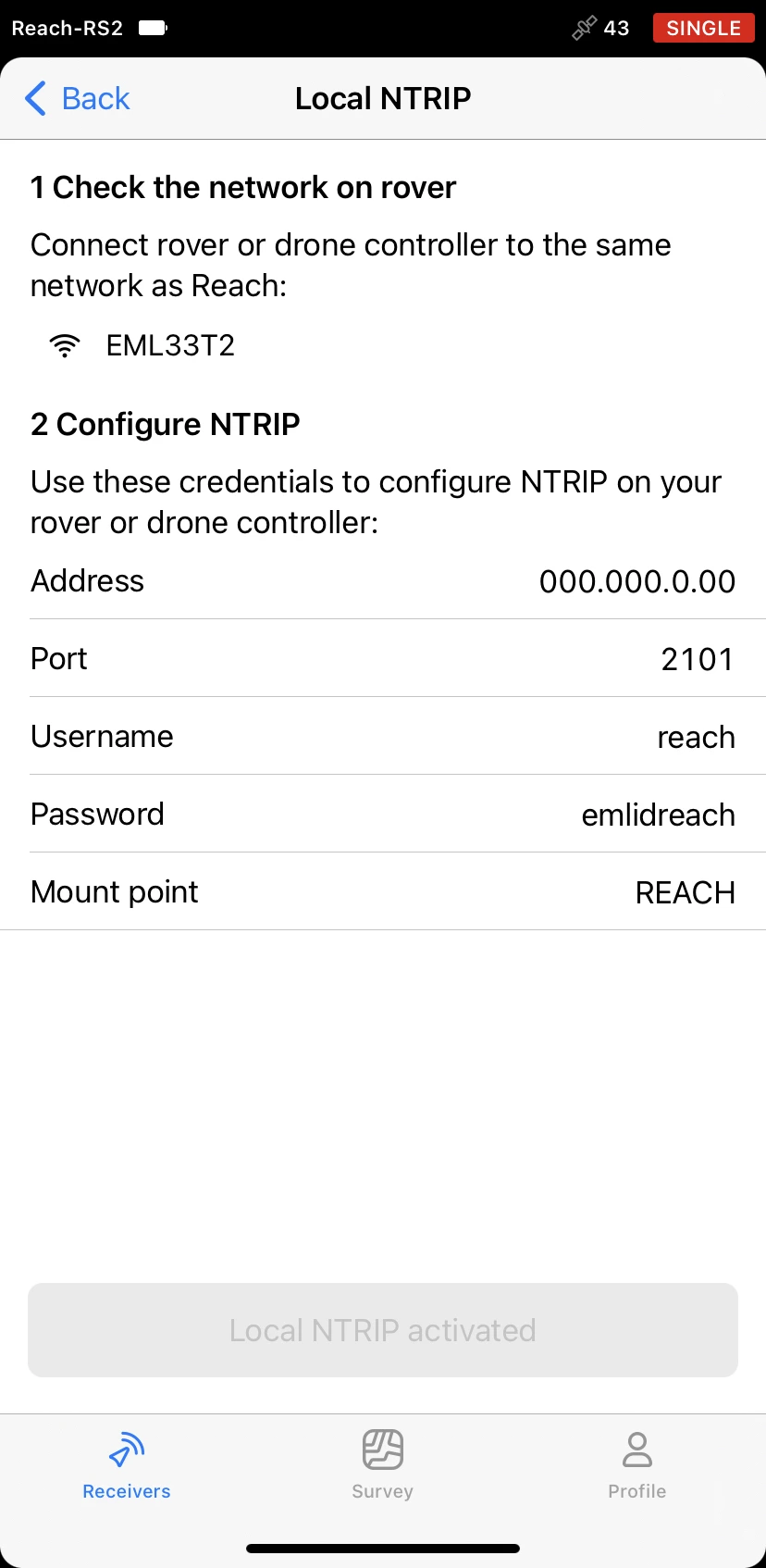
-
Conecte o Autel Smart Controller à mesma rede Wi-Fi que o seu Reach.
notePara garantir uma ligação correta, mantenha a distância entre o controlador do drone e a sua base dentro de alguns metros.
Configure o Reach RS2/RS2+ como base utilizando o Emlid Caster
Para configurar o seu Reach como base para o Autel EVO II Enterprise utilizando o Emlid Caster, é necessário obter acesso ao Emlid Caster e obter credenciais NTRIP. Siga os passos abaixo:
-
Acesse Emlid Caster e obtenha as credenciais NTRIP para a base e o rover.
tipPara saber mais, consulte a documentação do Emlid Caster.
-
Coloque o seu Reach no tripé e garanta que ele tenha uma visão limpa do céu.
tipSaiba mais sobre o posicionamento da base nos guias Colocação e Escolhendo um método para instalação da base.
-
Abra o Emlid Flow e conecte-se ao seu receptor.
-
Conecte o seu Reach à Internet.
tipPara saber mais sobre como conectar o Reach RS2/RS2+ à Internet, consulte os seguintes guias:
-
Na tela Receptores (Receivers), toque em Saída da base (Base output) e selecione a opção NTRIP.
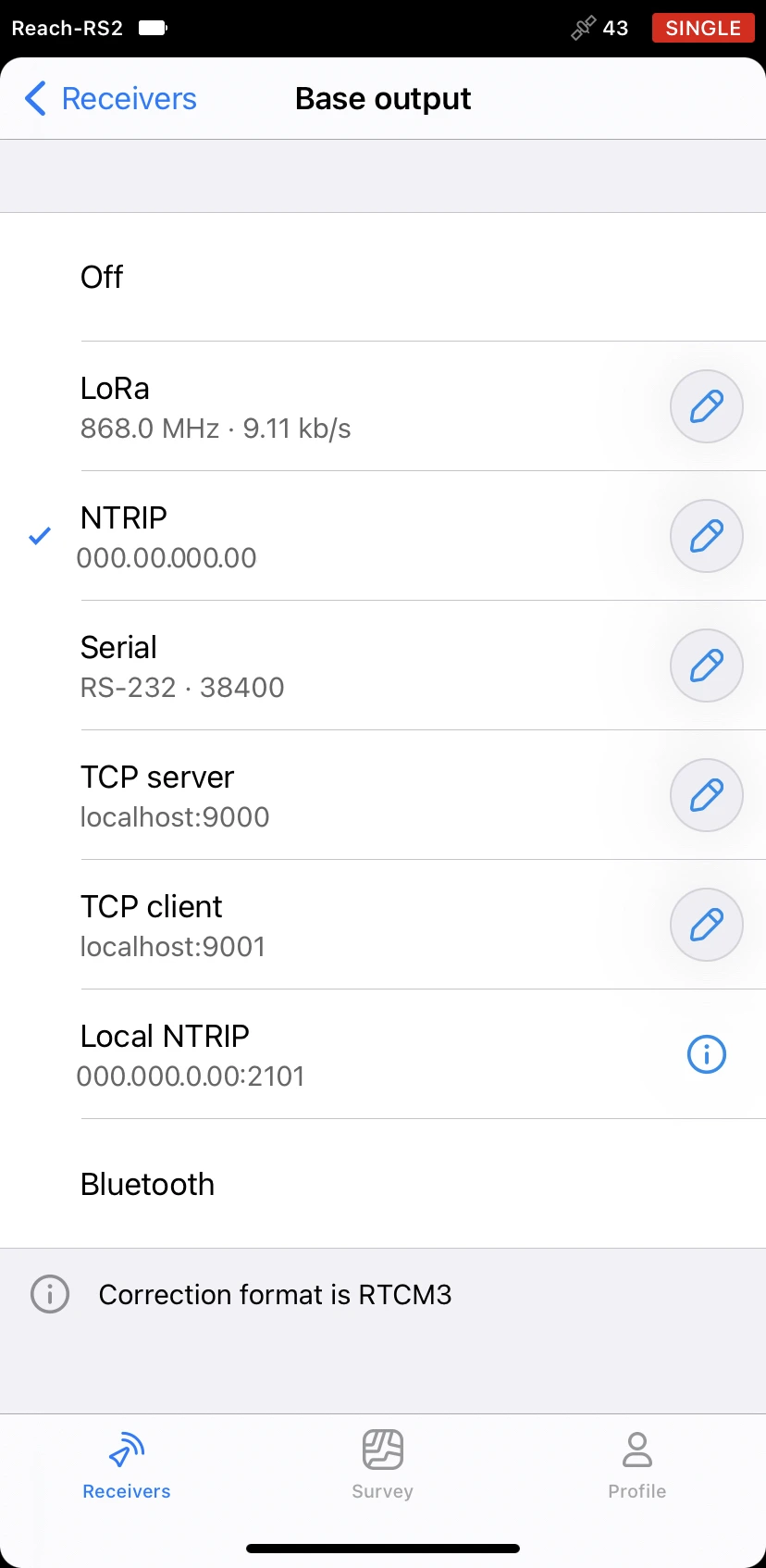
-
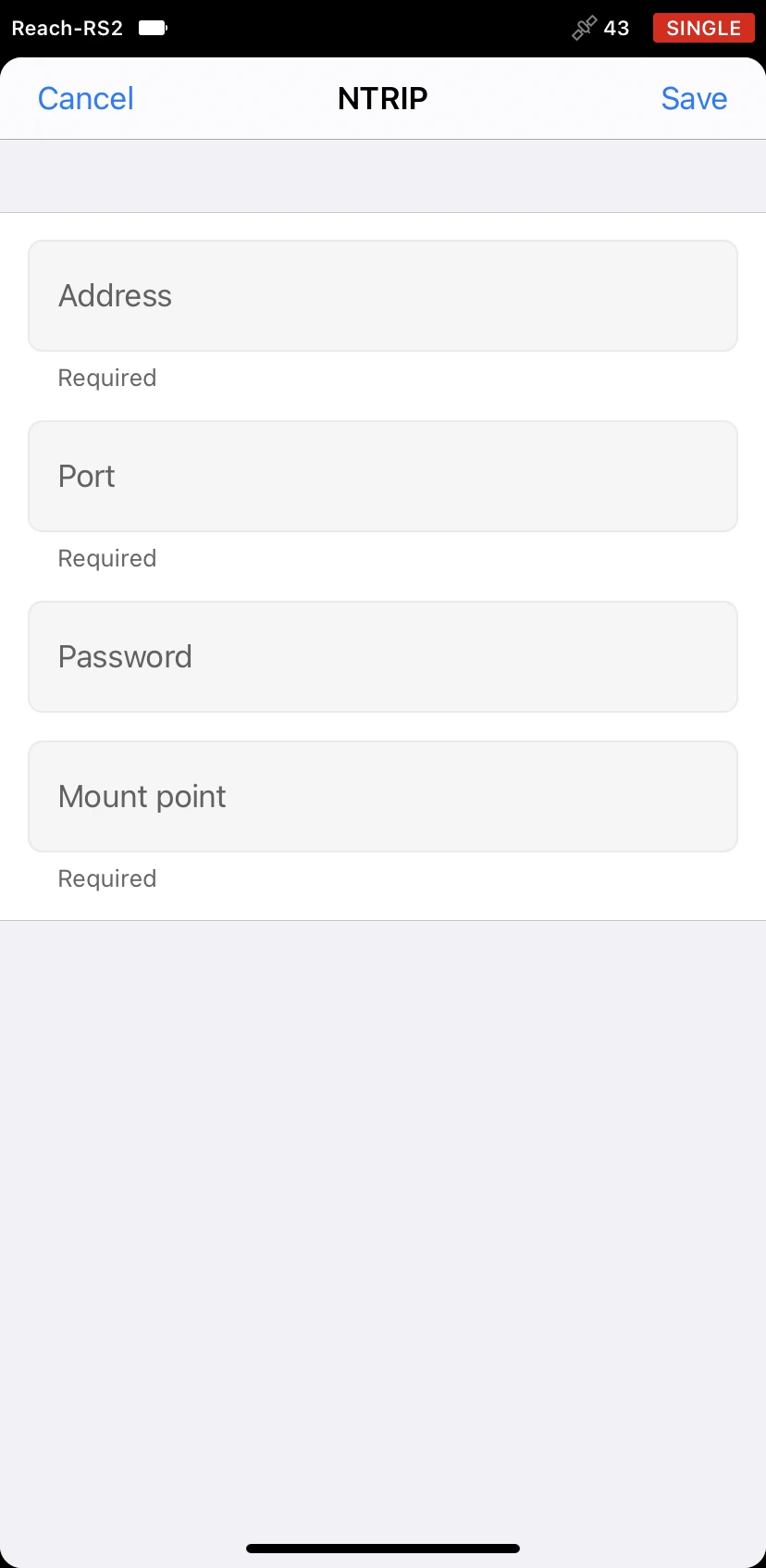
Toque no botão Edit (Editar) e insira as credenciais NTRIP da base:
-
Endereço: A URL ou o endereço IP do transmissor NTRIP.
-
Porta: A porta usada para se conectar ao transmissor. O valor padrão geralmente é 2101, a menos que seu provedor especifique uma porta diferente.
-
Nome de usuário: O nome de usuário utilizado para autenticação no serviço NTRIP. Em alguns casos, pode ser o seu nome ou endereço de e-mail.
-
Senha: A senha associada ao nome de usuário.
-
Estação de referência: O nome do fluxo de correção fornecido pelo serviço NTRIP.
tipPara saber qual a estação de referência mais adequada, consulte o site do seu fornecedor NTRIP. Em geral, distâncias mais curtas até a estação de referência melhoram o desempenho do RTK.
notePara garantir o sucesso da transmissão das correções, verifique novamente as credenciais introduzidas.
-
Depois de colocar e configurar a sua base, você pode proceder para a configuração do drone.
Configure o Autel EVO II Enterprise como rover
Para configurar o Autel EVO II Enterprise como um rover, siga os passos abaixo:
-
Fixe o módulo RTK ao seu drone.
tipPule esta etapa, se você estiver usando o drone Autel EVO II RTK Series.
-
Conecte o controlador ao seu drone.
-
Abra a aplicação Autel Explorer. Toque no botão Câmera.
-
Para abrir a tela Configurações, toque no ícone de engrenagem no canto superior direito.
-
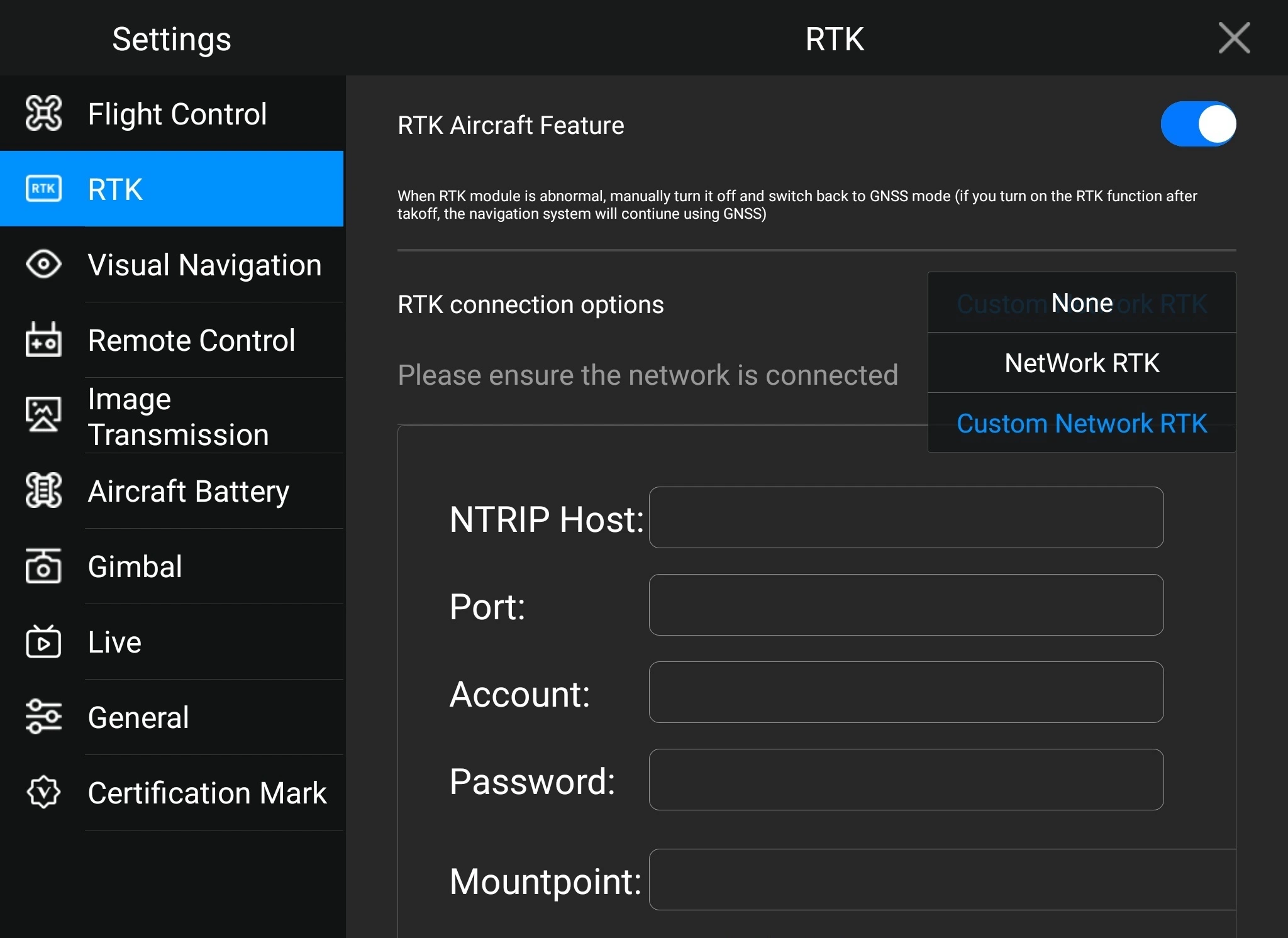
Vá para a tela RTK.
-
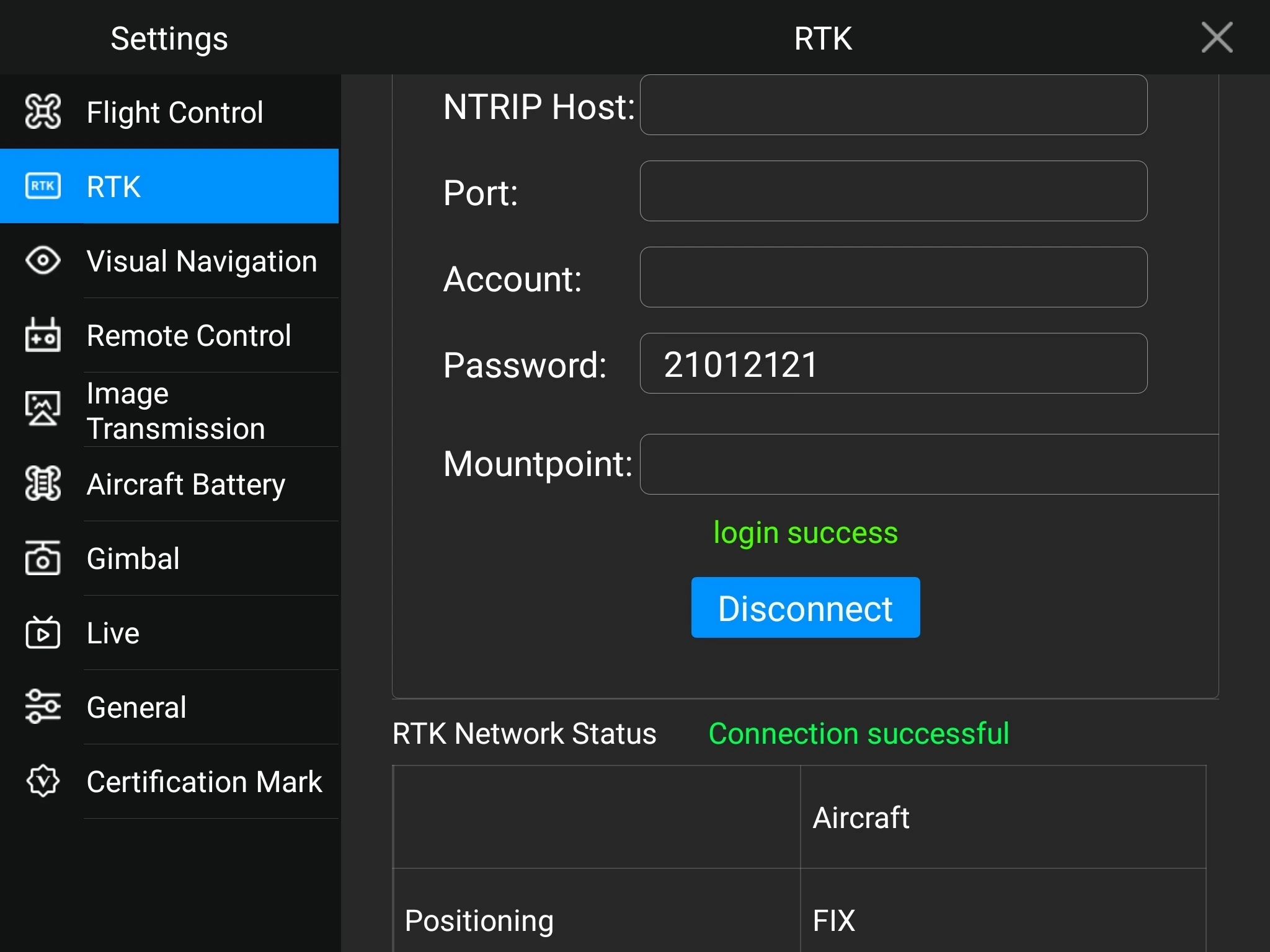
Ative a opção Característica de aeronave RTK (RTK Aircraft Feature). Em RTK connection options (Opções de conexão RTK), escolha a opção Custom Network RTK (RTK de rede personalizada) e preencha as credenciais NTRIP:
- Host NTRIP: A URL ou o endereço IP do servidor NTRIP.
- Porta: A porta usada para se conectar ao transmissor. O valor padrão geralmente é 2101, a menos que seu provedor especifique uma porta diferente.
- Conta: O nome de usuário utilizado para autenticação no serviço NTRIP. Em alguns casos, pode ser o seu nome ou endereço de e-mail.
- Senha: A senha associada ao nome de usuário.
- Estação de referência: O nome do fluxo de correção fornecido pelo serviço NTRIP.
notePreencha as credenciais que você obteve ao acessar o Emlid Caster ou ao ativar a opção NTRIP local no Emlid Flow. Certifique-se de estar usando as credenciais para o rover.
-
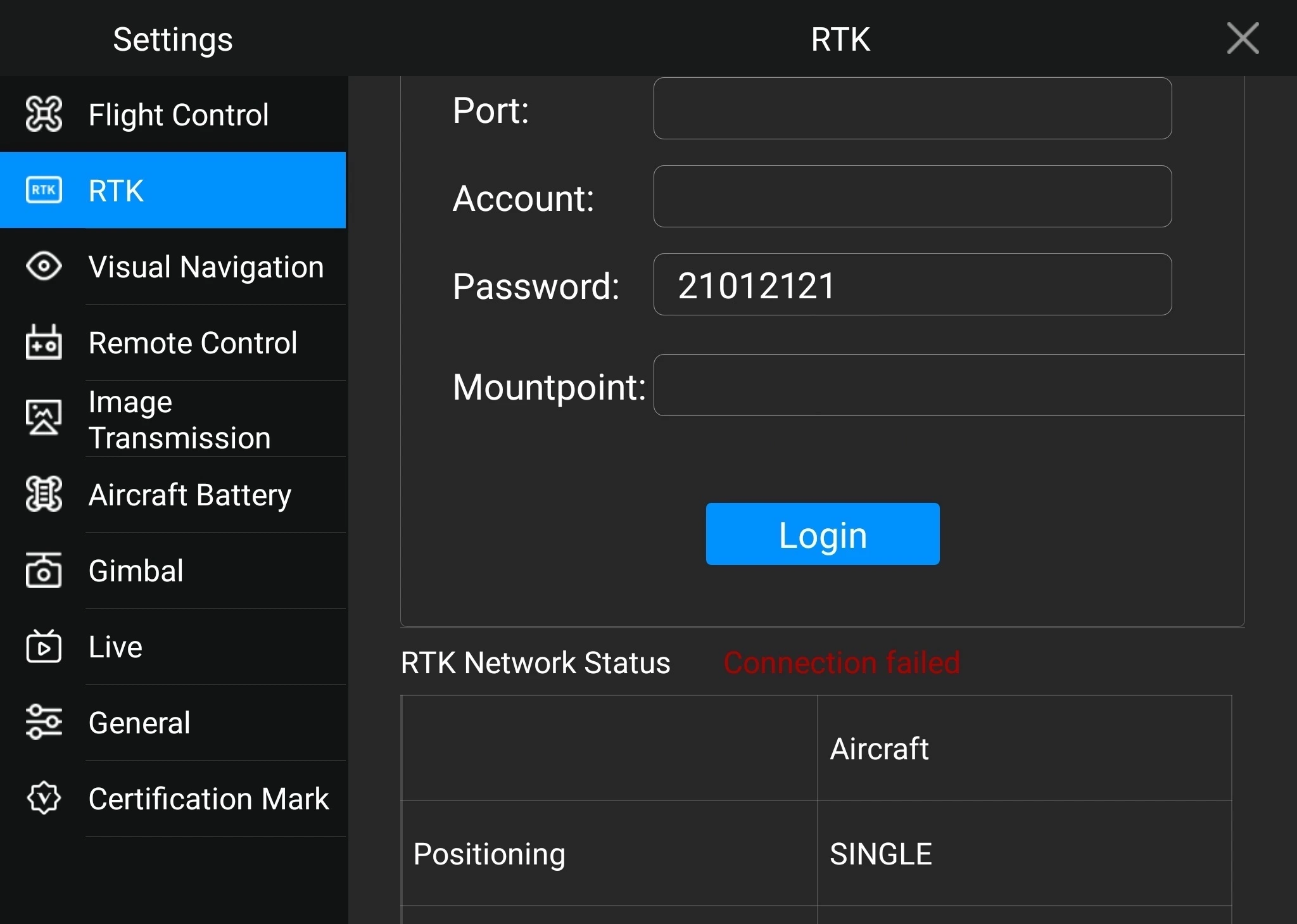
Toque em Entrar.
-
A mensagem sessão iniciada com sucesso (login success) será exibida se a base for conectada com sucesso. O Status da rede RTK (RTK Network Status) deve mudar para o estado Conexão bem-sucedida (Connection successful).
Efetuar o voo
Quando você estabelecer a comunicação entre o seu Reach e um drone, poderá efetuar o voo. Forneça ao Autel EVO II Enterprise uma visão limpa do céu e prossiga para a missão.
Uma vez concluído o voo, você pode baixar as imagens georeferenciadas e utilizá-las para mapeamento posterior em software de fotogrametria.
Para criar um mapa usando o Pix4DMapper, consulte o tutorial [Criando o mapa] (https://docs.emlid.com/reach/tutorials/post-processing-workflow/pix4d-tutorial).
Créditos
Gostaríamos de agradecer a Dave Pitman por compartilhar sua experiência de uso do drone da Autel Robotics como ferramenta de levantamento com o Reach RS2/RS2+.