Escolha do método de configuração da base
Visão geral
Cinemática em Tempo Real (RTK) é uma técnica que aumenta a exatidão do posicionamento GNSS usando dois receptores: uma base estacionária com coordenadas conhecidas e um rover em movimento. O rover mede sua posição em relação à base. Isso significa que, embora medidas com precisão centimétrica, as coordenadas do rover são apenas tão exatas quanto a colocação da base. Qualquer deslocamento na posição da base absoluta também estará presente nas medições do rover.
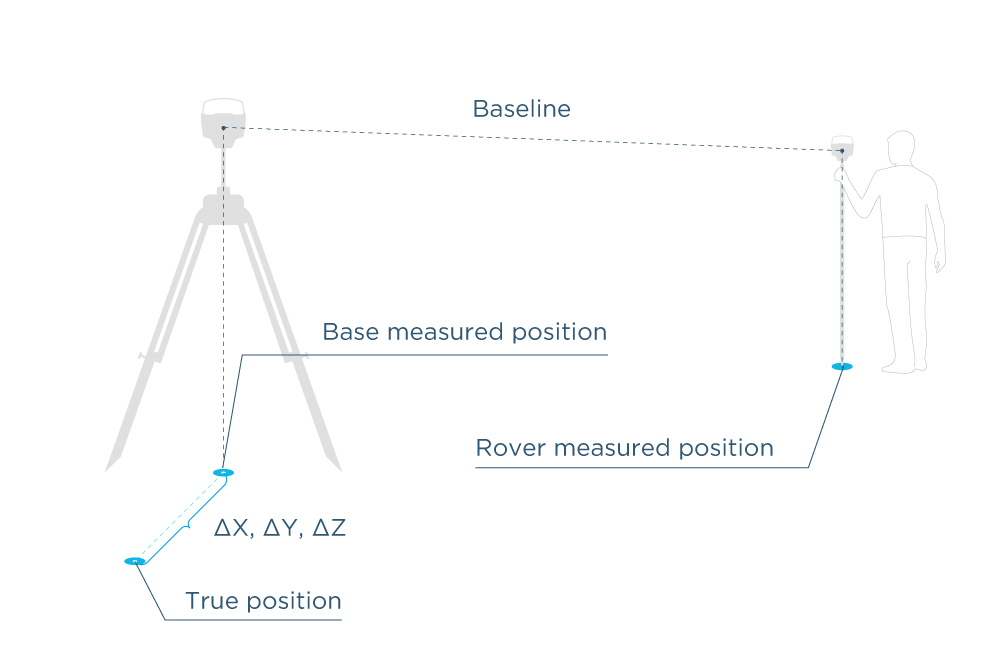
Para alguns aplicativos, é suficiente que a posição de um objeto seja exata apenas em relação à estação base, mas, para levantamento e mapeamento, é fundamental saber a posição real com alta exatidão absoluta. Para isso, o erro na posição da estação base deve ser evitado ou reduzido, colocando-a sobre um ponto conhecido ou determinando cuidadosamente suas coordenadas.
Por isso, é importante prestar muita atenção ao posicionamento adequado ao montar a base. Vamos dar uma olhada nos principais conceitos que o ajudarão a entender como configurar adequadamente a base para suas necessidades.
Sistemas de coordenadas e datums
A primeira coisa a considerar antes de configurar a base para RTK é o sistema de coordenadas que você usará para as medições.
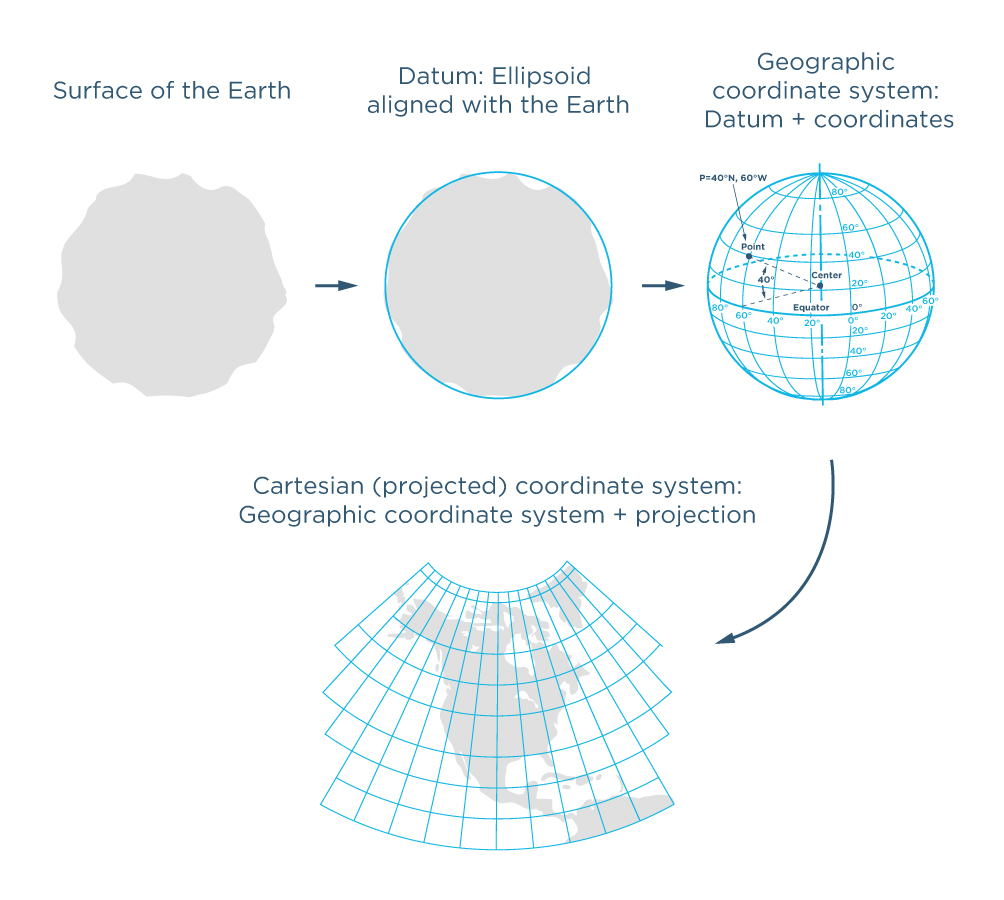
No levantamento topográfico, a posição de um objeto no espaço é definida por um sistema de coordenadas. Há muitos sistemas de coordenadas projetados para diferentes aplicações e países. A base de todo sistema de coordenadas é o datum.
O Datum contém as informações sobre o modelo matemático da Terra (elipsoide) e como ele está alinhado com a superfície da Terra, fornecendo o quadro de referência para as medições. Um sistema de coordenadas é então usado para descrever as posições relativas ao datum com latitude e longitude. Para uma representação cartesiana achatada das coordenadas, é aplicada uma projeção cartográfica.
É importante escolher o datum e o sistema de coordenadas corretos para a área em que está trabalhando se quiser que suas medições sejam compatíveis com os outros dados existentes. Misturar datums é como misturar quilômetros e milhas - suas medições não farão sentido.
O datum e o sistema de coordenadas necessários geralmente são fornecidos no trabalho técnico ou na documentação oficial. Em alguns casos, é possível procurar o sistema de coordenadas otimizado para a sua área no EPSG Geodetic Parameter Dataset (também conhecido como registro EPSG).
Toda a configuração termina com a configuração do projeto em seu rover, o que requer a especificação de um sistema de coordenadas que geralmente se baseia no datum de sua base.
Saiba mais sobre a configuração do sistema de coordenadas no Emlid Flow e no Emlid Flow 360 no artigo Introdução aos sistemas de coordenadas.
Posicionamento
Depois de configurar um sistema de coordenadas, você precisa decidir como definirá as coordenadas da base. Em geral, há duas maneiras de definir a posição de sua base - especificar as coordenadas do ponto conhecido ou calcular a média da posição de sua base em SINGLE.
Em ambos os casos, as medições do rover serão precisas em centímetros, mas a exatidão absoluta sempre dependerá da exatidão da posição da base. Dependendo do método de configuração da base, é possível obter alta exatidão relativa (cálculo da média em SINGLE) ou absoluta (usando as coordenadas conhecidas).
Saiba mais sobre a exatidão absoluta e relativa no artigo Introdução simples à exatidão e precisão em nosso blog.
Posicionamento relativo
Como mencionado anteriormente, no RTK, a base serve como o principal ponto de referência para o rover. As coordenadas coletadas pelo rover são sempre exatas em relação à base, mas podem não ser exatas em relação ao sistema de coordenadas selecionado. Isso é chamado de posicionamento relativo e ocorre quando a posição da estação base não é definida com exatidão no quadro de referência selecionado.
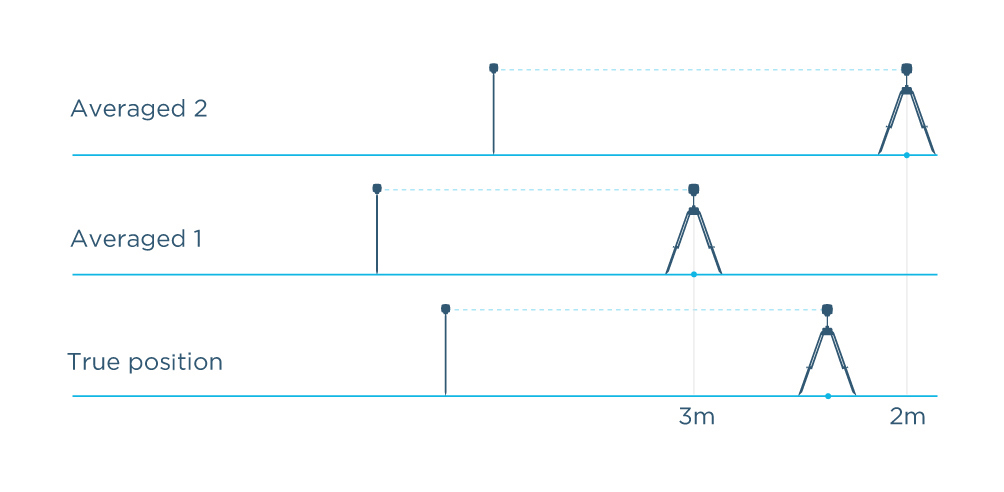
Por exemplo, quando você não sabe a posição da base, pode calcular a média em SINGLE. A média é feita no modo autônomo sem o uso de correções, e a posição é determinada com a exatidão de vários metros. Cada vez que você calcula a média da posição da base a partir do mesmo ponto, as coordenadas medidas podem diferir em vários metros dos resultados anteriores e da posição real. Assim, a exatidão real (absoluta) das medições do rover será no nível do metro. Veja a Figura 1 abaixo.
Esse tipo de configuração é adequado quando você precisa medir os objetos em relação uns aos outros. Por exemplo, esse método pode ser usado para medir áreas e distâncias ou para manter um trator autônomo no caminho certo. Para reutilizar a configuração e obter as mesmas coordenadas para os mesmos pontos, você precisará posicionar a base sobre o mesmo ponto (usar uma marca no chão é uma boa ideia) e inserir manualmente as mesmas coordenadas de base determinadas anteriormente ou escolhê-las entre as salvas no Emlid Flow. Caso contrário, você poderá acabar com uma posição de base diferente que não se encaixará em seu projeto e levará a uma incompatibilidade de coordenadas.
Depois que a posição da estação base é definida, a estação base transmite suas coordenadas conhecidas e os dados observados dos satélites para o rover. Nesse caso, a estação base apresenta uma solução SINGLE, pois não calcula sua própria posição e apenas fornece dados de referência ao rover. O rover combina os dados recebidos da base com suas próprias observações por satélite para calcular uma solução RTK e, normalmente, apresenta uma solução FIX.
Se você quiser saber mais sobre esse método, consulte nosso guia sobre o uso do método de entrada de coordenadas Média SINGLE no Emlid Flow.
Posicionamento absoluto
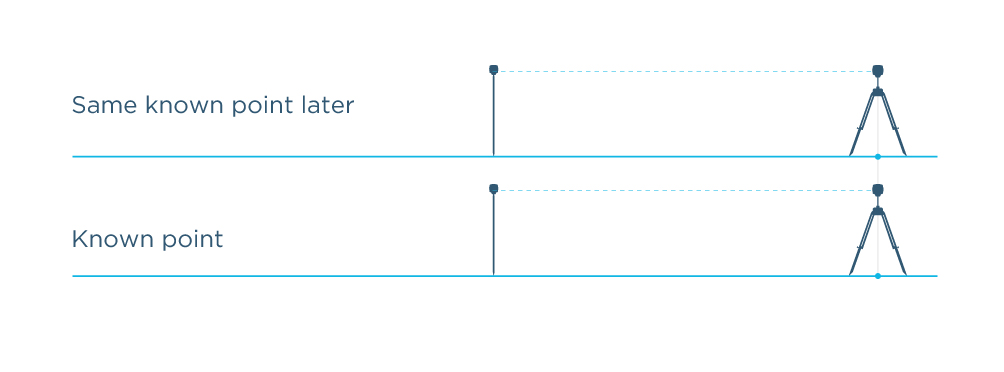
Quando as posições coletadas no RTK são exatas em relação à base e ao sistema de coordenadas selecionado, isso é chamado de posicionamento absoluto. Para isso, as coordenadas da base devem ser conhecidas e definidas manualmente. A inserção da posição conhecida da base "fixa" a configuração do RTK no local correto no solo. Dessa forma, as posições medidas com o rover serão precisas e exatas no sistema de coordenadas selecionado até o nível de centímetro. Veja a Figura 2 abaixo.
Recomendamos configurar a base usando o método de entrada manual de coordenadas se quiser obter resultados precisos e repetíveis em um sistema de coordenadas selecionado. Trabalhar com uma posição de base conhecida é necessário quando se planeja usar as medições coletadas com outros dados, por exemplo, enviar os limites das parcelas levantadas para o registro terrestre. Há várias maneiras de obter coordenadas conhecidas para configurar a base:
- Posicione a base sobre o ponto conhecido ou referência existente usando o método Método manual de entrada de coordenadas no aplicativo Emlid Flow;
- Se a referência estiver localizada em um ponto de difícil acesso, mas você estiver por perto, poderá usar as coordenadas da referência para aplicar o recurso deslocamento da base no Emlid Flow;
- Defina as coordenadas de sua base com exatidão absoluta de centímetros usando o Método de entrada de coordenadas Média FIX, configurando-a como um rover e recebendo correções do serviço NTRIP;
- Determine as coordenadas de um ponto usando o Fluxo de trabalho de processamento estático no Emlid Studio ou serviços de pós-processamento on-line, como OPUS, AUSPOS, NRCAN, IBGE.
Leia mais:
- Configurando a posição da base manualmente
- Cálculo médio da posição da base em FIX
- Aplicando o deslocamento da base
- Serviço de processamento de GPS on-line da AUSPOS
- Serviço de Usuário para Posicionamento Online (OPUS) da NOAA
- Posicionamento por Ponto Preciso do Sistema Canadense de Referência Espacial (CSRS-PPP)
- IBGE-PPP - Serviço on-line para pós-processamento de dados GNSS
- Cálculo médio da posição da base em SINGLE