Elegir el método de configuración de la base
Resumen
La cinemática en tiempo real (RTK) es una técnica que mejora la precisión del posicionamiento GNSS utilizando dos receptores: una base fija con coordenadas conocidas y un vehículo móvil. El rover mide su posición respecto a la base. Esto significa que, aunque se midan con precisión centimétrica, las coordenadas del rover solo son precisas si la colocación de la base también lo es. Cualquier cambio en la posición base absoluta también estará presente en las mediciones del rover.
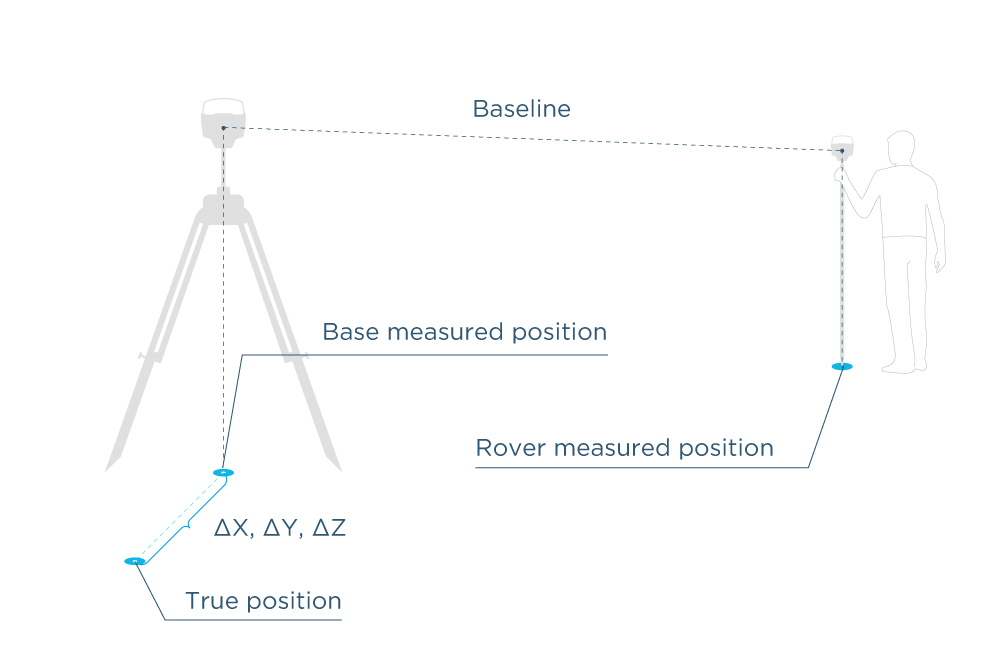
Para algunas aplicaciones, basta con que la posición de un objeto solo sea precisa en relación con la estación base, pero para la topografía y la cartografía es fundamental conocer la posición real con una gran exactitud absoluta. Para lograrlo, hay que evitar o reducir el error en la posición de la estación base situándola sobre un punto conocido o determinando cuidadosamente sus coordenadas.
Por eso es importante prestar mucha atención a la posición correcta al colocar la base. Echemos un vistazo a los conceptos clave que le ayudarán a entender cómo configurar correctamente la base para sus necesidades.
Sistemas de coordenadas y datums
Lo primero que hay que tener en cuenta antes de configurar la base para RTK es el sistema de coordenadas que se va a utilizar para las mediciones.
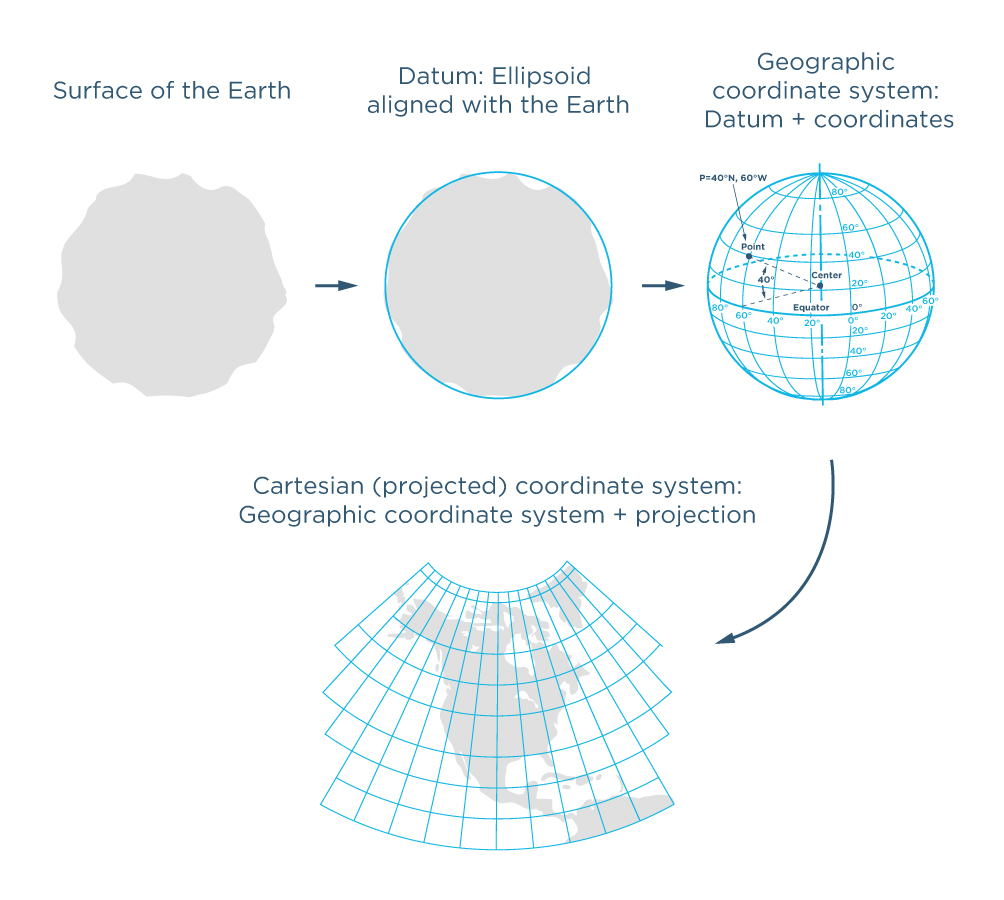
En topografía, la posición de un objeto en el espacio se define mediante un sistema de coordenadas. Existen muchos sistemas de coordenadas diseñados para diferentes aplicaciones y países. La base de todo sistema de coordenadas es el datum.
El datum contiene la información sobre el modelo matemático de la Tierra (elipsoide) y cómo está alineado con la superficie terrestre, lo cual proporciona el marco de referencia para las mediciones. A continuación, se utiliza un sistema de coordenadas para describir las posiciones relativas al datum con latitud y longitud. Para obtener una representación cartesiana aplanada de las coordenadas, se aplica una proyección cartográfica.
Es importante elegir el datum y el sistema de coordenadas correctos para la zona en la que se trabaja si se desea que las mediciones sean compatibles con los demás datos existentes. Mezclar puntos de referencia es como mezclar kilómetros y millas: las mediciones no tendrán sentido.
El datum y el sistema de coordenadas requeridos suelen figurar en el encargo técnico o en la documentación oficial. En algunos casos, puede buscar el sistema de coordenadas optimizado para su zona en el conjunto de datos de parámetros geodésicos de la EPSG (también conocido como registro EPSG).
La configuración completa termina con la configuración del proyecto en el rover, lo que requiere especificar un sistema de coordenadas que normalmente se basa en el datum de la base.
Obtenga más información sobre la configuración del sistema de coordenadas en Emlid Flow y Emlid Flow 360 en el artículo Introducción a los sistemas de coordenadas.
Posicionamiento
Después de establecer un sistema de coordenadas, debe decidir cómo va a establecer las coordenadas base. En general, hay dos formas de establecer la posición de su base: especificar las coordenadas del punto conocido o promediar la posición de tu base en SINGLE.
En ambos casos, las mediciones del rover tendrán una precisión centimétrica, pero la precisión absoluta dependerá siempre de la exactitud de la posición de la base. Dependiendo del método de configuración de la base, puede obtener una gran exactitud relativa (promediando en SINGLE) o absoluta (utilizando las coordenadas conocidas).
Obtenga más información sobre la precisión absoluta y relativa en el artículo Introducción sencilla a la precisión y exactitud de nuestro blog.
Posicionamiento relativo
Como ya se ha mencionado, en RTK, la base sirve como punto de referencia principal para el rover. Las coordenadas recogidas por el rover son siempre precisas con respecto a la base, pero pueden no serlo con respecto al sistema de coordenadas seleccionado. Esto se denomina posicionamiento relativo y se produce cuando la posición de la estación base no está definida con precisión en el marco de referencia seleccionado.
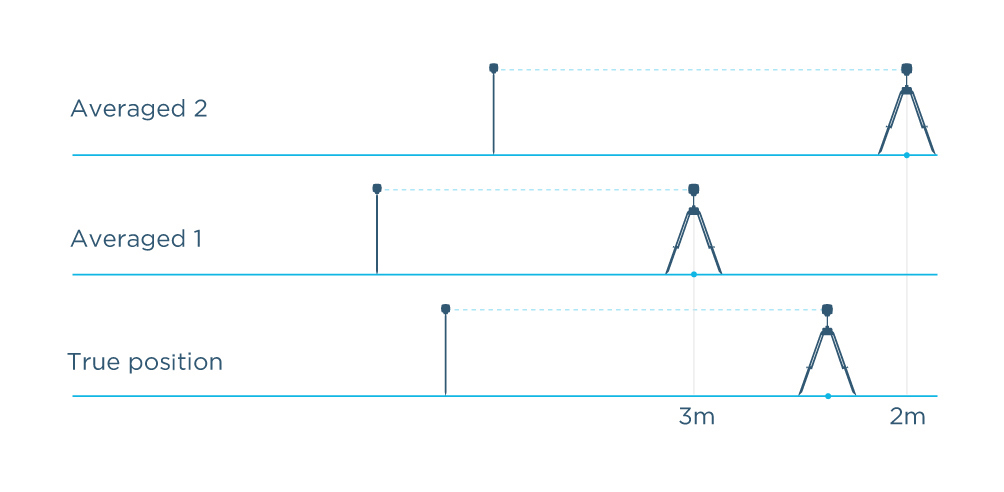
Por ejemplo, cuando no conoce la posición de la base, puede promediarla en SINGLE. El promediado se realiza en modo autónomo sin utilizar correcciones y la posición se determina con una exactitud de varios metros. Cada vez que promedie la posición base desde el mismo punto, las coordenadas medidas pueden diferir en varios metros de los resultados anteriores y de la posición verdadera. Por lo tanto, la exactitud real (absoluta) de las mediciones del rover estará al nivel del metro. Consulte la Figura 1.
Este tipo de configuración es adecuada cuando se necesita medir los objetos relativamente entre sí. Por ejemplo, este método puede utilizarse para medir áreas y distancias, o para mantener un tractor autónomo en la trayectoria correcta. Para reutilizar la configuración y obtener las mismas coordenadas para los mismos puntos, tendrá que colocar la base sobre el mismo punto (una marca en el suelo es una buena opción) e introducir manualmente las mismas coordenadas de base determinadas previamente o seleccionarlas de las guardadas en Emlid Flow. De lo contrario, puede acabar con una posición base diferente que no se ajuste a su proyecto y dé lugar a un desajuste de coordenadas.
Una vez establecida la posición de la base, la estación base transmite al rover sus coordenadas conocidas y los datos observados de los satélites. En este caso, la estación base muestra una solución SINGLE, ya que no calcula su propia posición y solo proporciona datos de referencia al rover. El rover combina los datos recibidos desde la base con sus propias observaciones por satélite para calcular una solución RTK y, por lo general, muestra una solución FIX.
Para obtener más información sobre este método, consulte nuestra guía sobre el uso del método de introducción de coordenadas Media SINGLE en Emlid Flow.
Posicionamiento absoluto
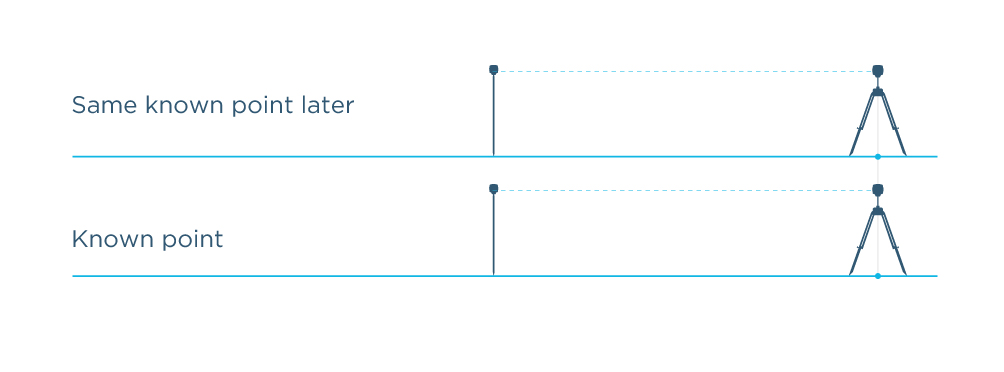
Cuando las posiciones recogidas en RTK son precisas tanto en relación con la base como con el sistema de coordenadas seleccionado, se denomina posicionamiento absoluto. Para ello, hay que conocer las coordenadas de la base y fijarlas manualmente. La introducción de la posición conocida de los «pines» de la base la configuración RTK en el lugar correcto del terreno. De este modo, las posiciones medidas con el rover serán precisas y exactas en el sistema de coordenadas seleccionado hasta el nivel centimétrico. Consulte la figura 2.
Recomendamos configurar la base mediante el método de introducción manual de coordenadas si desea obtener resultados precisos y repetibles en un sistema de coordenadas seleccionado. Trabajar con una posición base conocida es necesario cuando se planea utilizar las mediciones recogidas con los demás datos, por ejemplo, presentar los límites de las parcelas levantadas al registro de la propiedad. Hay varias formas de obtener coordenadas conocidas para establecer la base:
- Coloque la base sobre el punto conocido o de referencia existente utilizando el Método manual de introducción de coordenadas en la aplicación Emlid Flow;
- Si el punto de referencia se encuentra en un punto de difícil acceso pero usted está cerca, puede utilizar las coordenadas del punto de referencia para aplicar la función desplazamiento de base en Emlid Flow;
- Establezca las coordenadas de su base con exactitud centimétrica absoluta utilizando el Método de introducción de coordenadas de media FIX configurándola como rover y recibiendo correcciones del servicio NTRIP;
- Determina las coordenadas de un punto utilizando el Flujo de trabajo del procesamiento estático en Emlid Studio o servicios de posprocesamiento en línea como OPUS, AUSPOS, NRCAN o IBGE.
Más información:
- Configurar la posición base de forma manual
- Hacer un promedio de la posición base en FIX
- Aplicar desplazamiento de base
- AUSPOS: servicio de procesamiento GPS en línea
- Servicio de posicionamiento en línea para usuarios (OPUS) de la NOAA
- Posicionamiento preciso de puntos del Sistema de Referencia Espacial Canadiense (CSRS-PPP)
- IBGE-PPP: servicio en línea de posprocesamiento de datos GNSS
- Hacer un promedio de la posición base en SINGLE