Configuração manual da posição da base
Este guia explica como usar o método manual de entrada de coordenadas no aplicativo Emlid Flow para configurar a base em um ponto conhecido.
Visão geral
O método de entrada de coordenadas manuais no aplicativo Emlid Flow permite que você insira a posição da sua base quando tiver um ponto com coordenadas conhecidas no formato DD ou DMS LLH. Nesse caso, as posições medidas com o rover serão precisas e exatas no sistema de coordenadas selecionado até o nível de centímetro.
Para saber mais sobre a exatidão das medições RTK e PPK, leia nosso artigo Introdução simples à exatidão e precisão.
Fluxo de trabalho
Colocação da base no campo
Para posicionar sua estação base no campo, siga as recomendações abaixo.
Visão clara do céu sem nenhum obstáculo
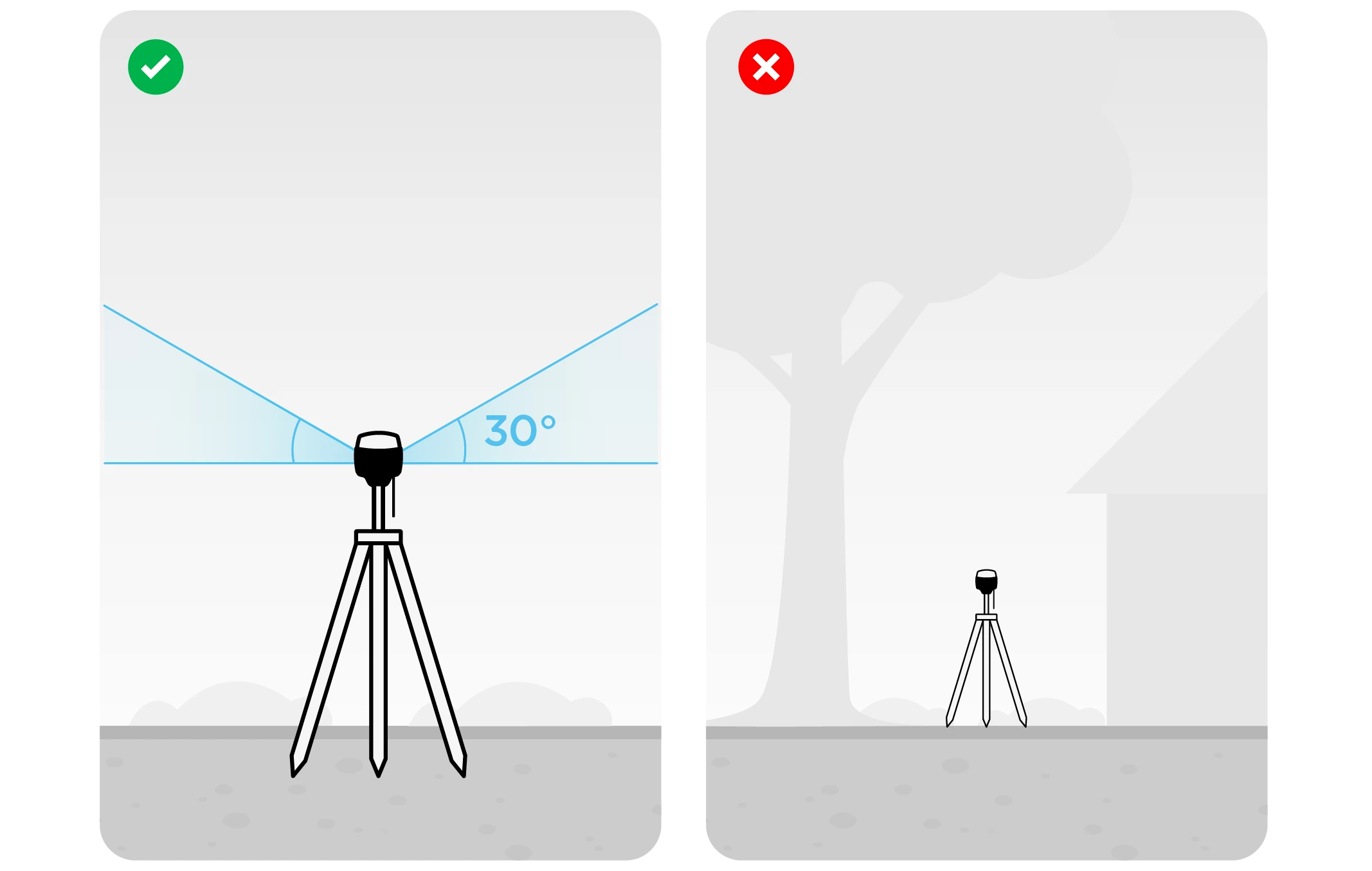
A base do Reach precisa ter uma visão clara do céu 30 graus acima do horizonte. Não deve haver obstáculos que possam bloquear a visão, como edifícios, árvores, carros, seres humanos, notebooks, etc.
Veja as duas imagens abaixo. A imagem da esquerda demonstra as condições desejáveis para a localização do Reach. A da direita é um exemplo de condições ambientais ruins, como a visão reduzida do céu, possíveis obstruções ou vegetação nas proximidades.
Exemplos de ambientes recomendados para a colocação do Reach:
- campo
- topo de uma colina
- telhado
Exemplos de ambientes ruins para a colocação do Reach:
- áreas internas
- zona urbana
- zona florestal
Não há eletrônicos por perto
Dispositivos eletrônicos podem produzir ruídos de RF que podem afetar a recepção do sinal de GNSS. Mantenha todos os componentes eletrônicos o mais longe possível da antena.
Medição do deslocamento da altura da antena
Ao colocar o Reach no campo, certifique-se de que o dispositivo Reach esteja posicionado precisamente acima do ponto marcado no tripé e nivelado. Quando estiver configurando as coordenadas da base manualmente, será necessário medir o deslocamento da altura da antena. Siga os passos abaixo:
-
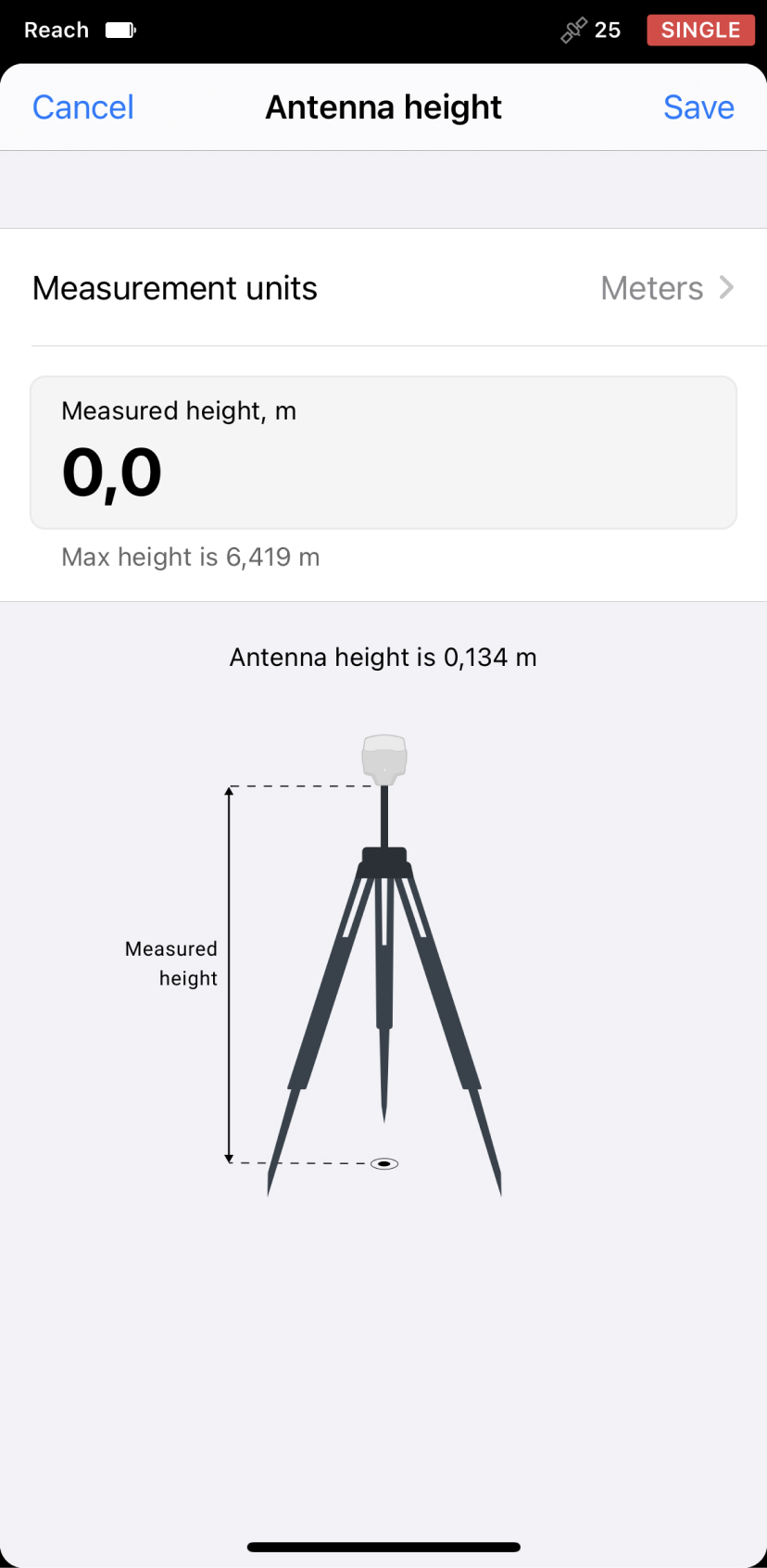
Meça a distância da marca até a parte inferior de seu Reach (h na Figura 1).
-
Especifique a distância medida no Emlid Flow. Ele calculará automaticamente a altura da antena.
tipPara o Reach RS2/RS2+, a altura da antena é a distância da marca no solo até o ponto central na parte inferior do Reach (h na Figura 1), ponto de referência da antena (ARP), mais a altura do receptor até o centro de fase da antena (APC), deslocamento da altura da antena. O Emlid Flow adiciona automaticamente o deslocamento da altura da antena, que é de 134 mm.
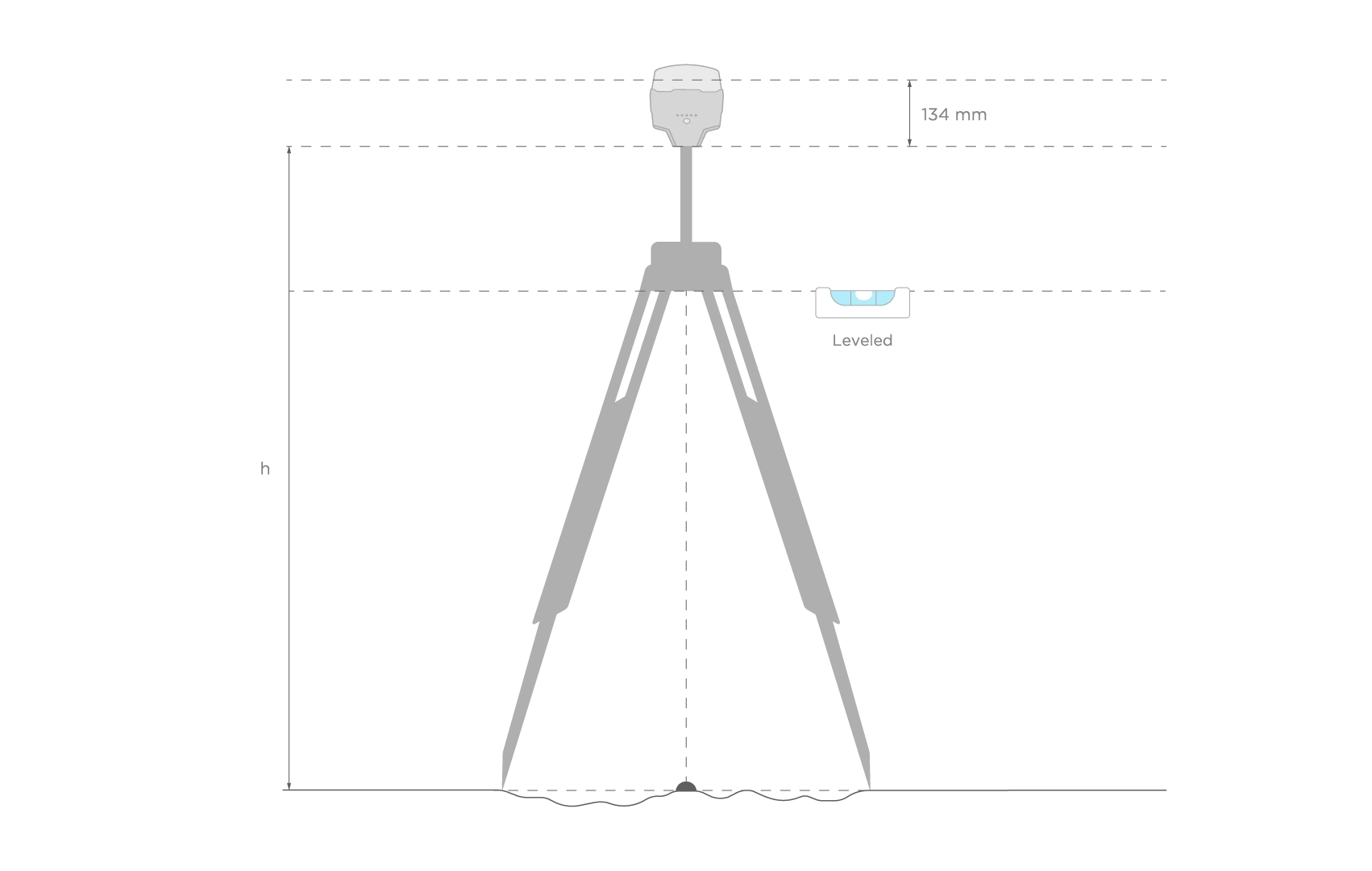 Figura 2. Altura da antena
Figura 2. Altura da antena
Quando você colocar o Reach sobre a marca e medir a altura da antena, estará pronto para configurar a posição da base no aplicativo Emlid Flow.
Configuração das coordenadas da base no Emlid Flow
Para configurar sua base usando o método de entrada de coordenadas manual no Emlid Flow, siga as etapas abaixo:
-
Abra o aplicativo Emlid Flow e conecte-se ao seu Reach.
-
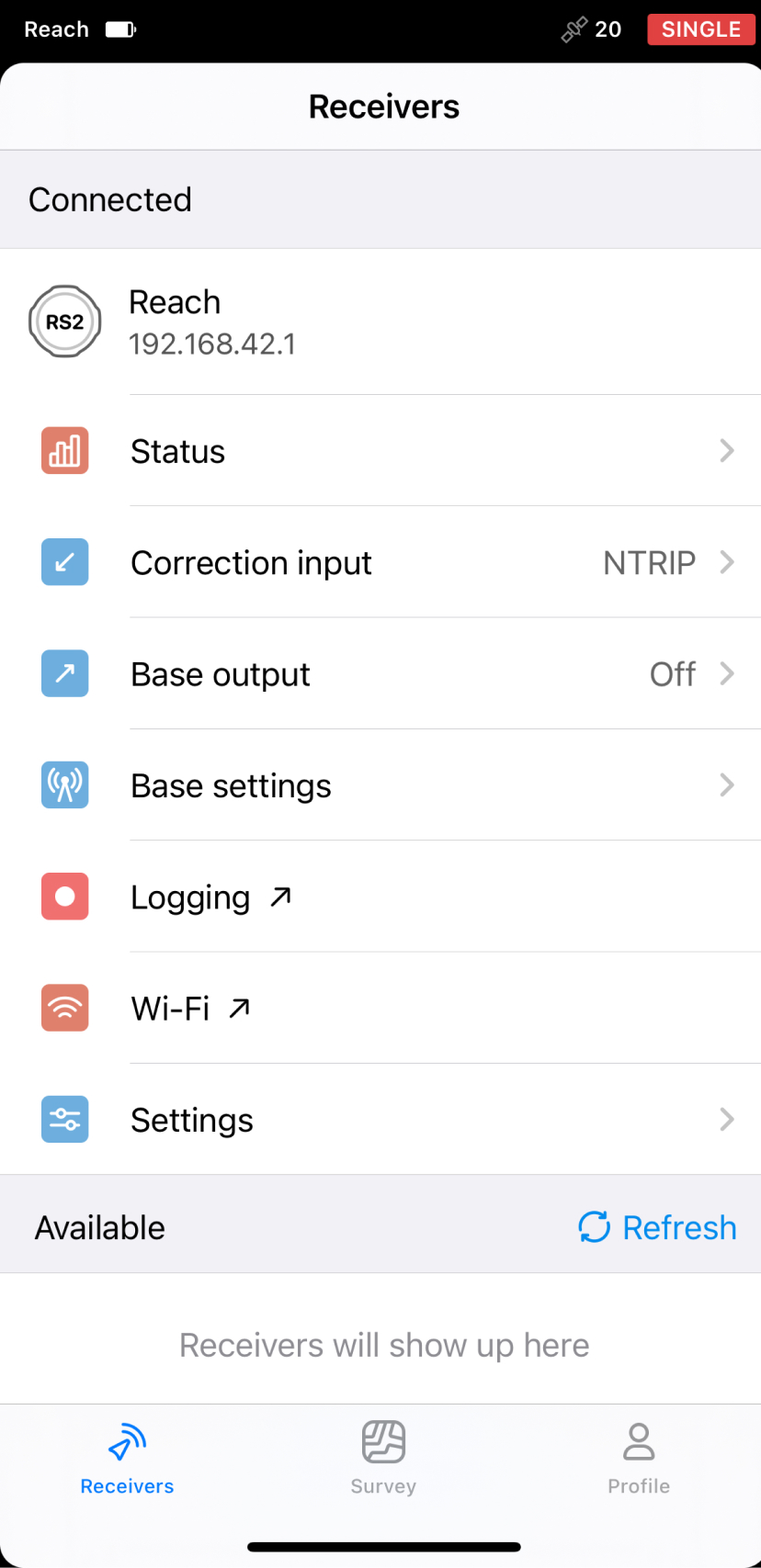
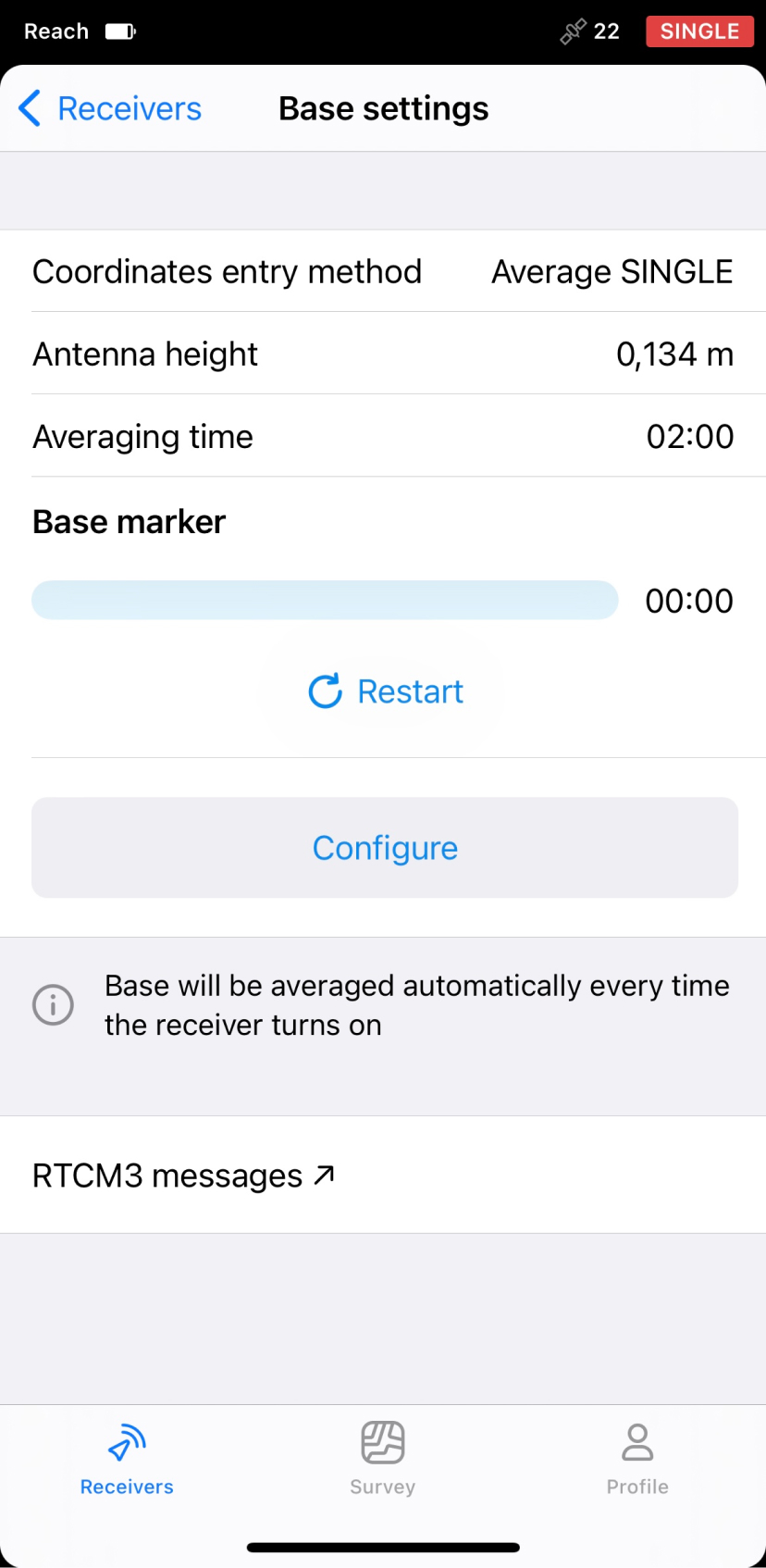
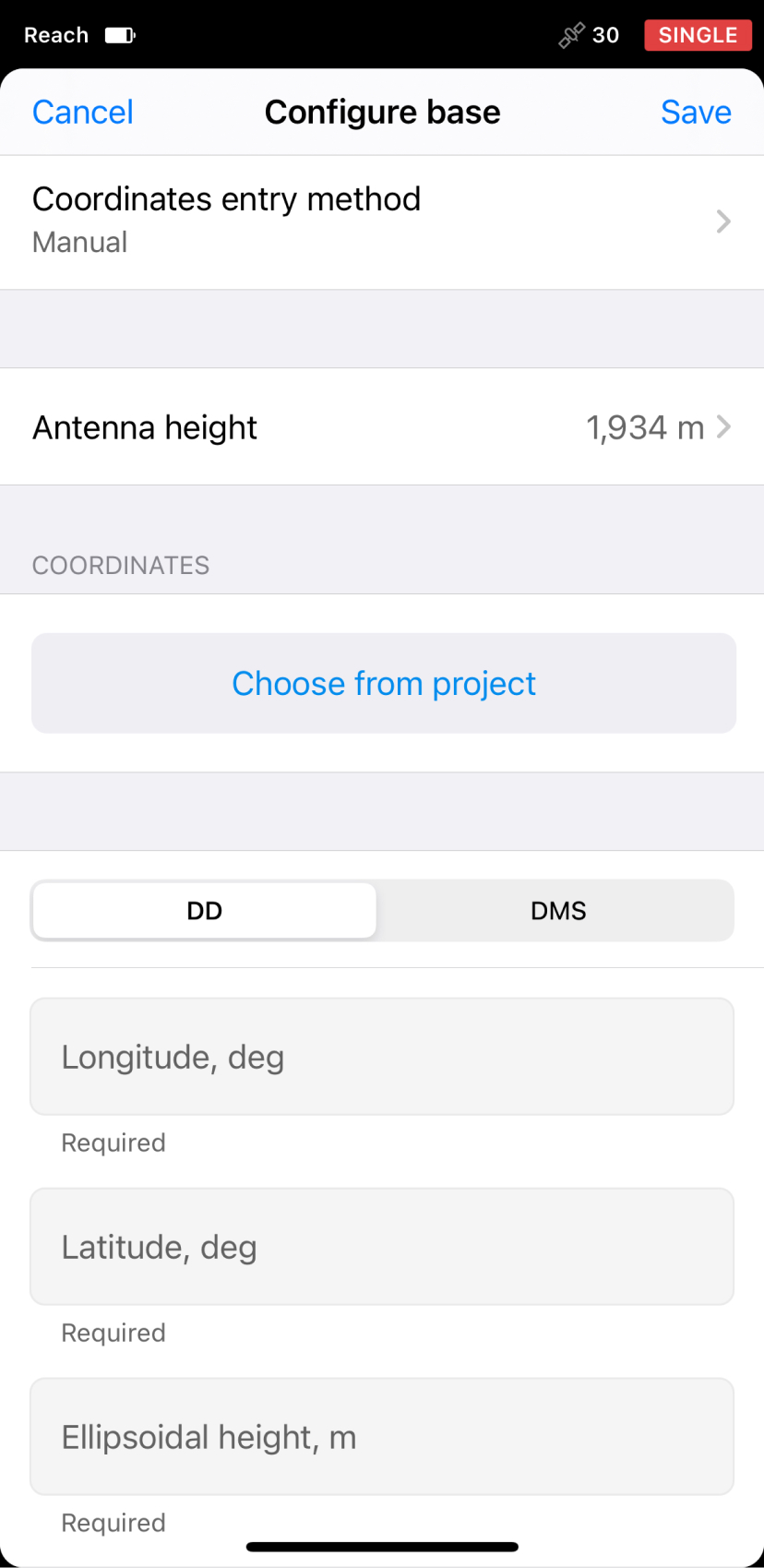
Vá para Configurações de base do seu Reach e toque em Configurar.
-
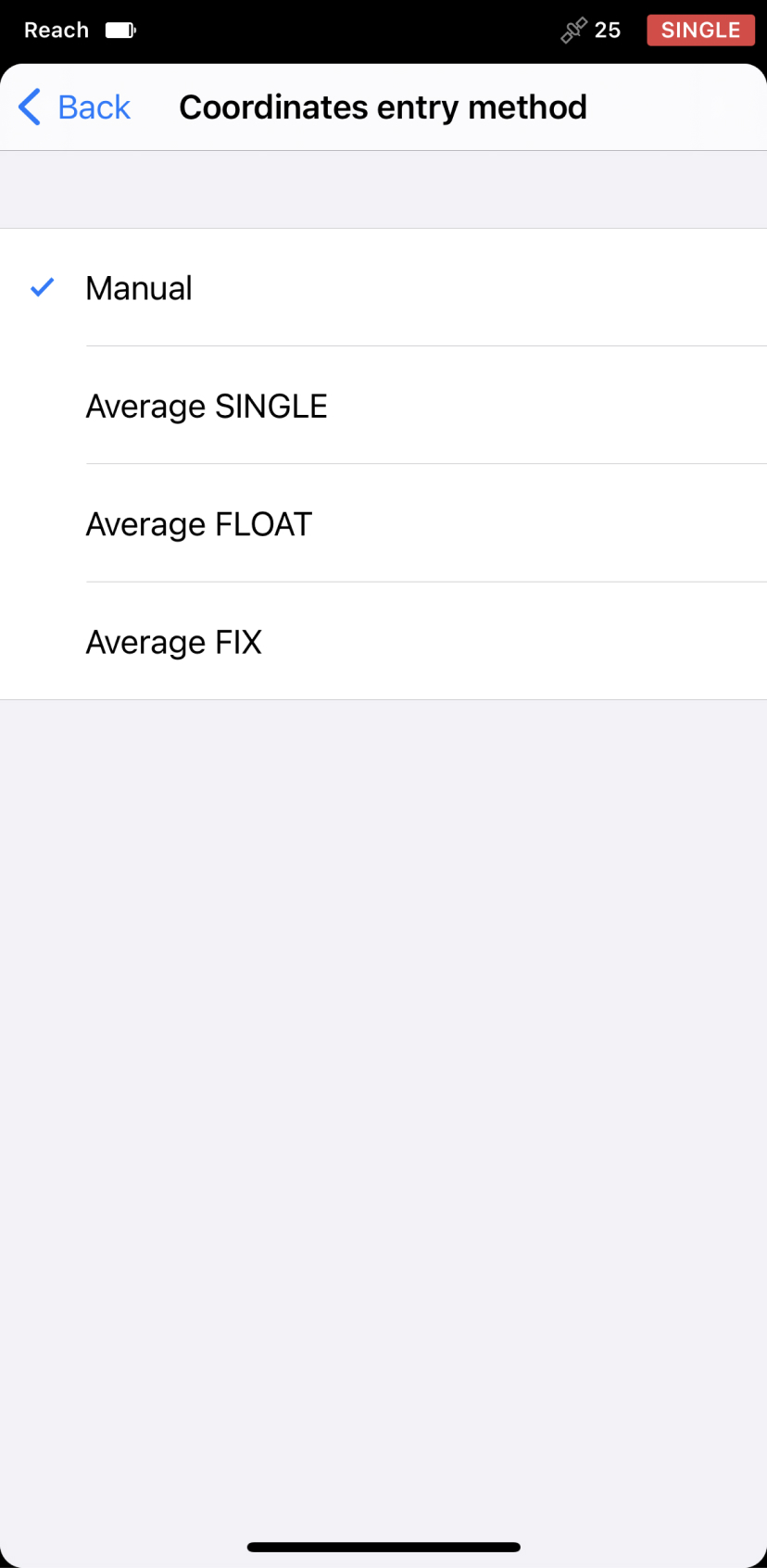
Toque em Método de entrada das coordenadas e selecione Manual no menu.
-
Toque em Altura da antena para definir a altura da antena e salvá-la.
-
Insira as coordenadas geográficas do seu ponto no formato DD ou DMS ou importe um ponto do seu projeto Emlid tocando em Escolher do projeto.
tipSe o seu ponto conhecido tiver coordenadas locais, adicione-o ao seu projeto Emlid e use a opção de seleção de pontos para defini-lo como coordenadas de uma base. O Emlid Flow converterá essas coordenadas em coordenadas geográficas.
 tip
tipPara corrigir as coordenadas de um ponto criado manualmente ou importado no Emlid Flow, escolha o ponto no mapa ou na lista de objetos, toque no menu de três pontos e selecione Duplicate and edit (Duplicar e editar). Edite as coordenadas e toque em Save (Salvar).
-
Depois de definir as coordenadas do ponto, toque em Salvar no canto superior direito.
As coordenadas da sua base agora estão definidas e você está pronto para prosseguir com a criação de um projeto no seu rover.
Depois de configurar o sistema de coordenadas para o seu projeto no rover, certifique-se de especificar o mesmo datum da base ao configurar o sistema de coordenadas do rover no projeto de levantamento.