Autel EVO II Enterprise und Reach RS2/RS2+ Basisintegration
Diese Anleitung zeigt, wie der Reach RS2/RS2+ als Basis für die Autel EVO II Enterprise Drohne eingerichtet wird, um Drohnenbilder für die weitere Kartierung in einer Photogrammetrie-Software zu geotaggen.
Es ist auch möglich, die Autel EVO II RTK Serie-Drohne mit der Reach RS2/RS2+ Basis zu verwenden.
Erfahren Sie mehr über RTK und PPK in den folgenden Anleitungen:
Übersicht
Autel EVO II Enterprise verwendet Ntrip, um Korrekturen zu empfangen, wodurch Sie Reach als Basisstation verwenden können. Der Reach kann Ntrip-Korrekturen über Emlid Caster über das Internet oder über die Option Lokales Ntrip in Emlid Flow ohne Internetverbindung senden.
Um die Option Lokales Ntrip zu verwenden, müssen die Basis und der Rover mit demselben WLAN-Netzwerk verbunden sein.
Um Ihren Reach als Basis für die Autel EVO II Enterprise Drohne einzurichten, benötigen Sie Folgendes:
- Autel EVO II Enterprise Drohne als Rover
- Controller
- Den Reach RS2/RS2+ als Basis
- Ein Smartphone oder Tablet mit installierter Emlid Flow App
- Reach RS2/RS2+ und Autel Smart Controller mit Internetverbindung, wenn Sie Emlid Caster verwenden
- Zugriff auf Emlid Caster
Arbeitsablauf
Reach RS2/RS2+ als Basis einrichten
Der Reach RS2/RS2+ kann Ntrip-Korrekturen über Emlid Caster oder über die Option Lokales Ntrip in Emlid Flow senden. Der Unterschied besteht darin, dass für Emlid Caster eine Internetverbindung erforderlich ist, während Sie mit Lokales Ntrip RTK ohne Internetverbindung einrichten können. Wählen Sie die Methode, die Ihrem Anwendungsfall entspricht, und befolgen Sie die nachstehenden Schritte.
Reach RS2/RS2+ mithilfe von Lokales Ntrip als Basis einrichten
Um Ihren Reach als Basis für die Autel EVO II Enterprise Drohne mit der Option „Lokales Ntrip“ in Emlid Flow einzurichten, gehen Sie wie folgt vor:
-
Stellen Sie den Reach auf das Stativ und sorgen Sie für eine freie Sicht zum Himmel.
tipErfahren Sie mehr über die Platzierung und Einrichtung der Basis in den Artikeln Platzierung und Auswahl der Methode zur Einrichtung der Basis.
-
Öffnen Sie Emlid Flow und stellen Sie eine Verbindung zu Ihrem Reach her.
-
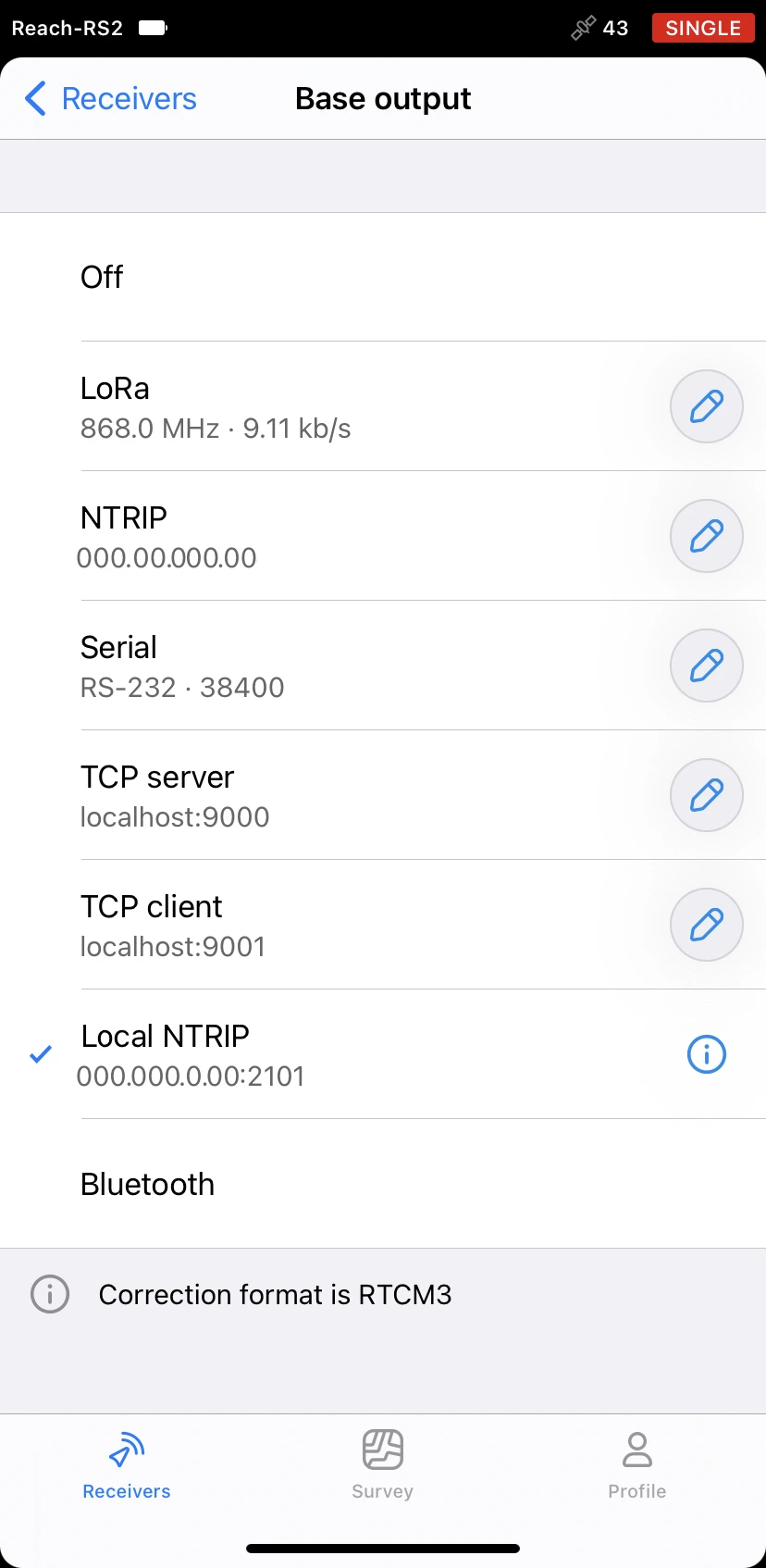
Tippen Sie auf Basisausgabe (Base output) und wählen Sie die Option Lokales Ntrip (Local NTRIP).
-
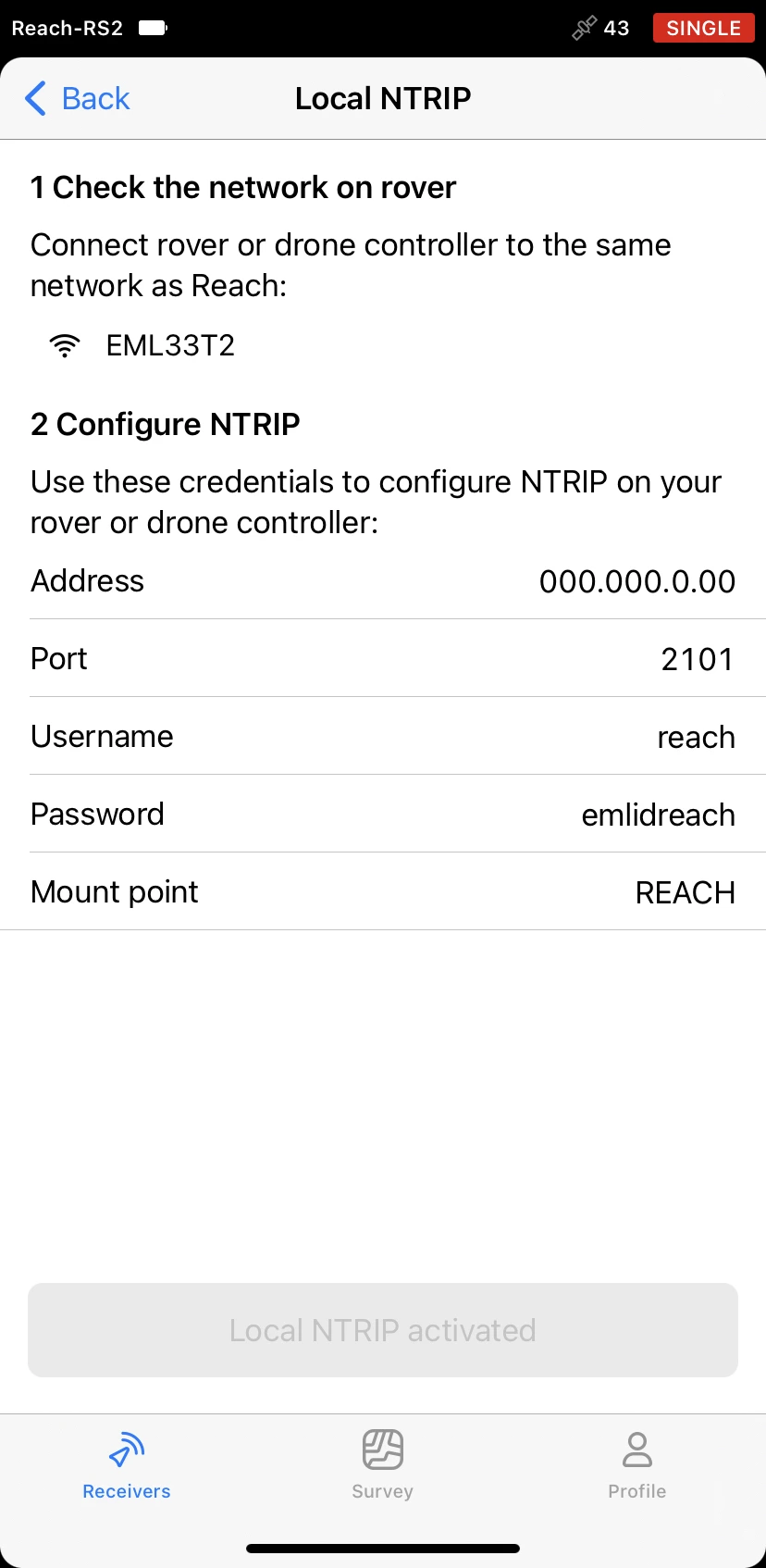
Tippen Sie auf die Schaltfläche Information, um die Seite mit den Rover-Anmeldedaten aufzurufen.
-
Verbinden Sie den Autel Smart Controller mit demselben WLAN-Netzwerk wie Ihren Reach.
noteUm eine ordnungsgemäße Verbindung zu gewährleisten, sollten Sie den Abstand zwischen dem Controller der Drohne und Ihrer Basis auf mehrere Meter begrenzen.
Reach RS2/RS2+ mithilfe von Emlid Caster als Basis einrichten
Um Ihren Reach als Basis für Autel EVO II Enterprise mit Emlid Caster einzurichten, müssen Sie Zugang zu Emlid Caster und die Ntrip-Anmeldedaten erhalten. Folgen Sie den nachstehenden Schritten:
-
Greifen Sie auf [Emlid Caster] (https://emlid.com/ntrip-caster/) zu und holen Sie sich Ntrip-Anmeldedaten für Basis und Rover.
tipWeitere Informationen finden Sie in Emlid Caster [docs] (https://docs.emlid.com/emlid-caster/getting-started-emlid-caster).
-
Stellen Sie den Reach auf das Stativ und sorgen Sie für eine freie Sicht zum Himmel.
tipErfahren Sie mehr über die Platzierung und Einrichtung der Basis in die Anleitungen Platzierung und Auswahl der Methode zur Einrichtung der Basis.
-
Öffnen Sie Emlid Flow und stellen Sie eine Verbindung mit dem Empfänger her.
-
Verbinden Sie den Reach mit dem Internet.
tipWenn Sie mehr darüber erfahren möchten, wie Sie Ihren Reach RS2/RS2+ mit dem Internet verbinden, lesen Sie die folgenden Anleitungen:
-
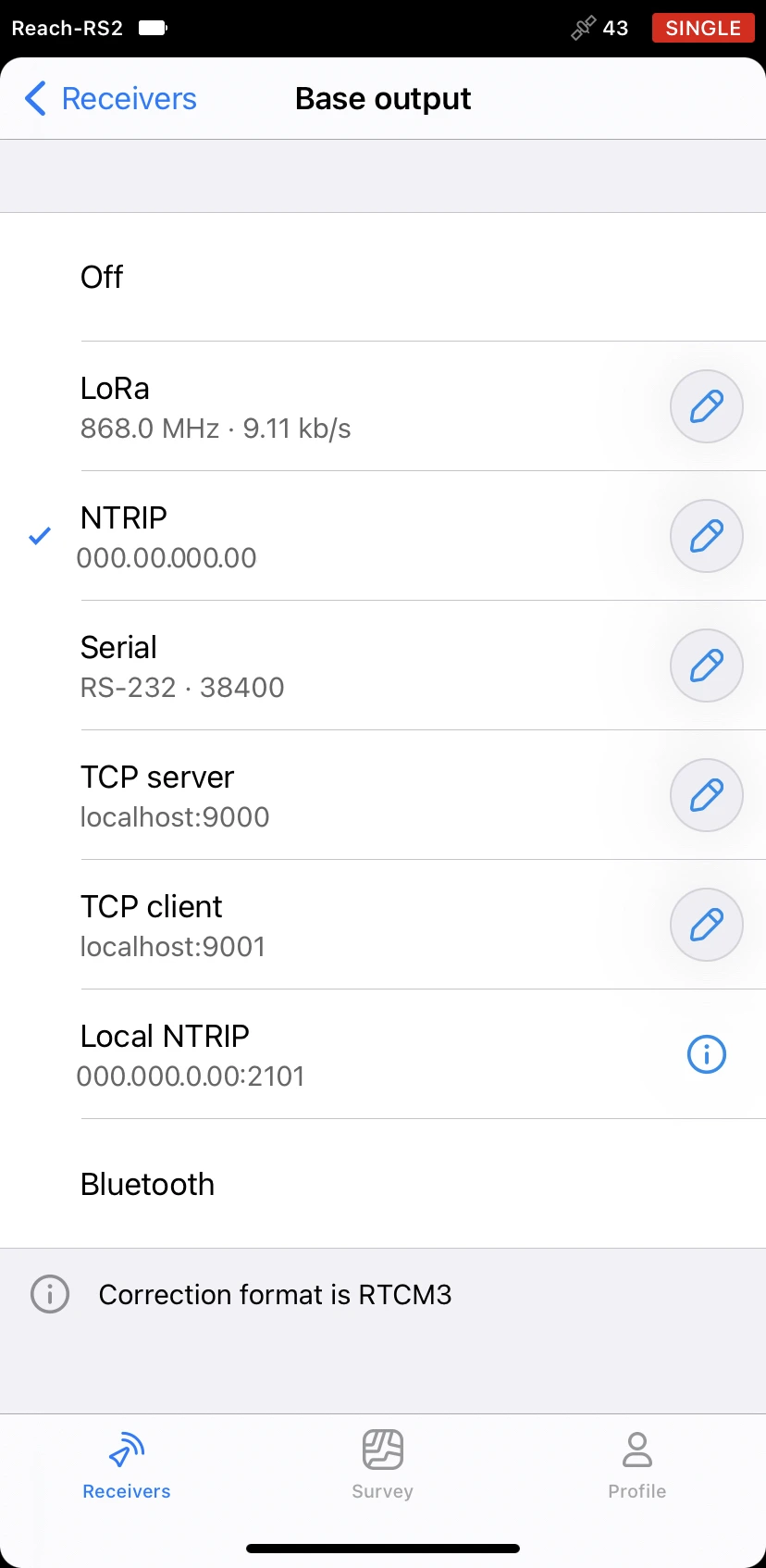
Tippen Sie auf dem Bildschirm Empfänger auf Basisausgabe und wählen Sie die Option Ntrip.
-
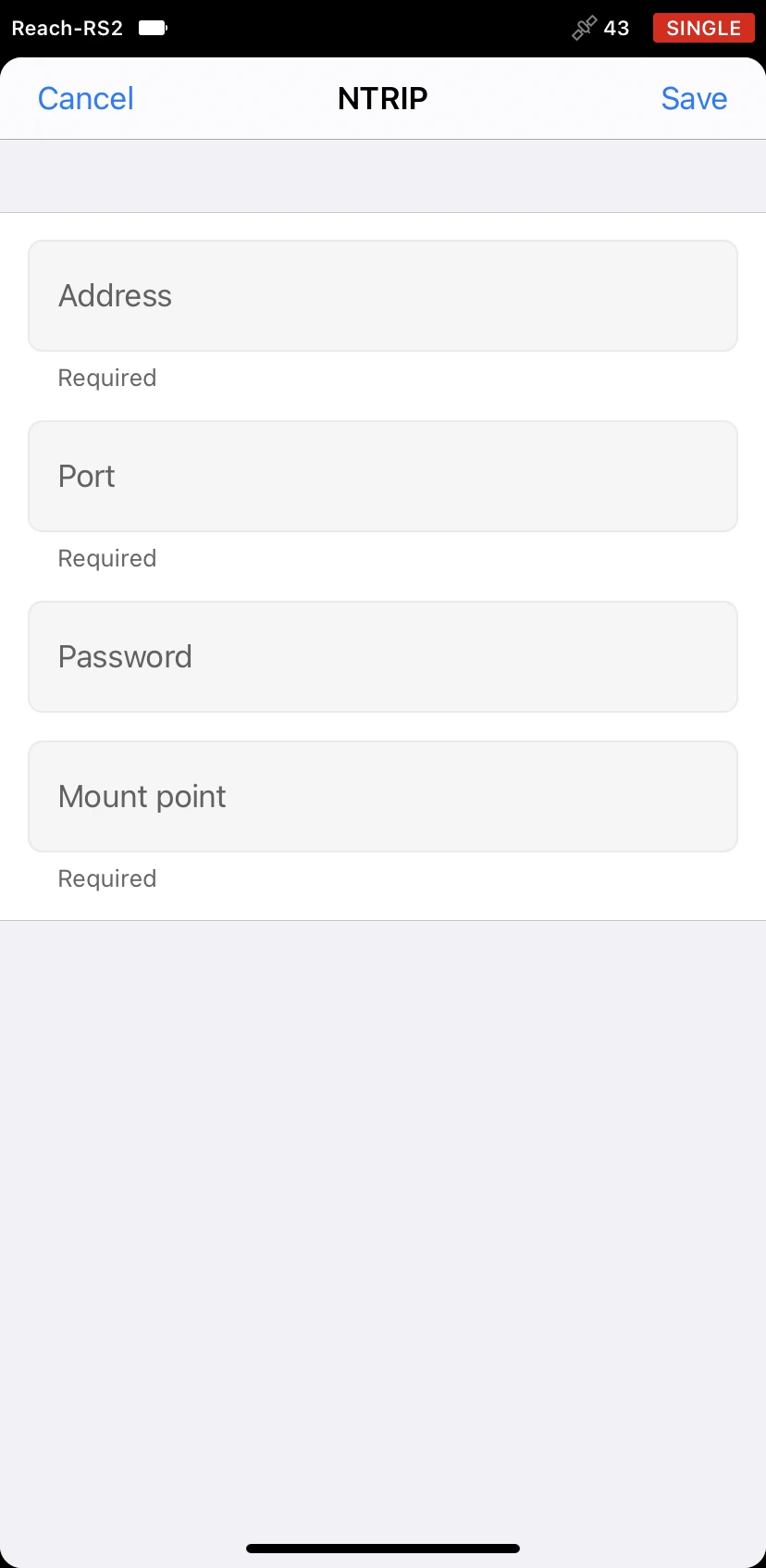
Tippen Sie auf die Schaltfläche Edit (Bearbeiten) und geben Sie die Ntrip-Anmeldedaten für die Basis ein:
-
Adresse: Die URL oder IP-Adresse des Ntrip-Casters.
-
Port: Der Port, über den die Verbindung zum Caster hergestellt wird. Der Standardwert ist in der Regel 2101, sofern Ihr Anbieter keinen anderen Port angibt.
-
Benutzername: Der Benutzername, der zur Authentifizierung beim Ntrip-Dienst verwendet wird. In manchen Fällen kann es sich dabei um Ihren Namen oder Ihre E-Mail-Adresse handeln.
-
Passwort: Das mit dem Benutzernamen verknüpfte Passwort.
-
Einhängepunkt: Der Name des vom Ntrip-Dienst bereitgestellten Korrekturstroms.
tipAuf der Website Ihres Ntrip-Anbieters können Sie herausfinden, welche Einhängepunkte für Sie am besten geeignet sind. Im Allgemeinen verbessert eine kürzere Entfernung zur Referenzstation die RTK-Leistung.
noteUm sicherzustellen, dass die Korrekturen erfolgreich übertragen werden, überprüfen Sie die eingegebenen Anmeldedaten.
-
Sobald Sie die Basis platziert und eingerichtet haben, können Sie mit der Einrichtung der Drohne fortfahren.
Autel EVO II Enterprise als Rover einrichten
Um Ihr Autel EVO II Enterprise als Rover einzurichten, folgen Sie den nachstehenden Schritten:
-
Bringen Sie das RTK-Modul an Ihrer Drohne an.
tipÜberspringen Sie diesen Schritt, wenn Sie eine Drohne der Autel EVO II RTK-Serie verwenden.
-
Verbinden Sie den Controller mit der Drohne.
-
Öffnen Sie die Autel Explorer App. Tippen Sie auf die Schaltfläche Kamera (Camera).
-
Um den Bildschirm Einstellungen (Settings) zu öffnen, tippen Sie auf das Zahnradsymbol in der oberen rechten Ecke.
-
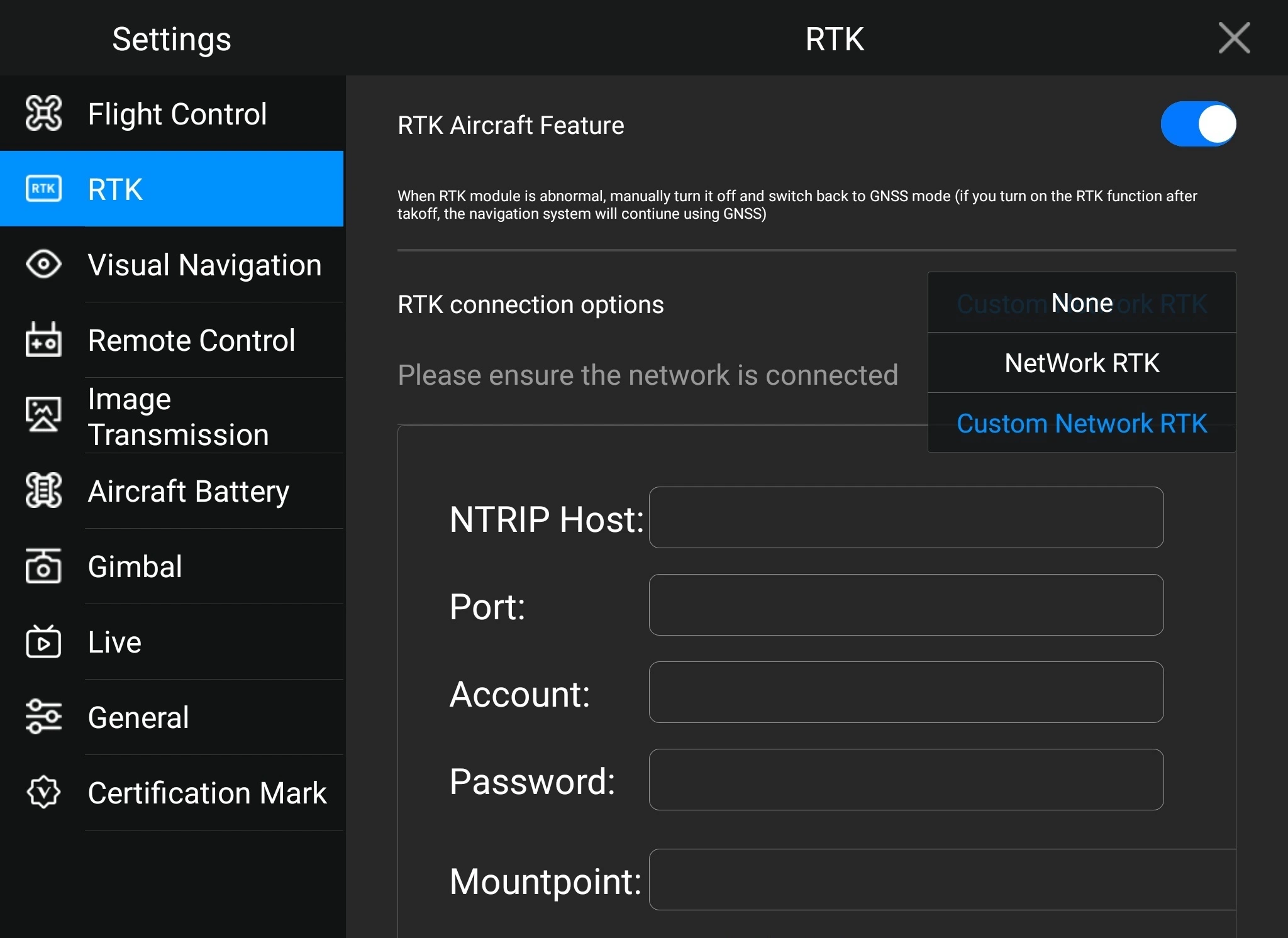
Gehen Sie zum Bildschirm RTK.
-
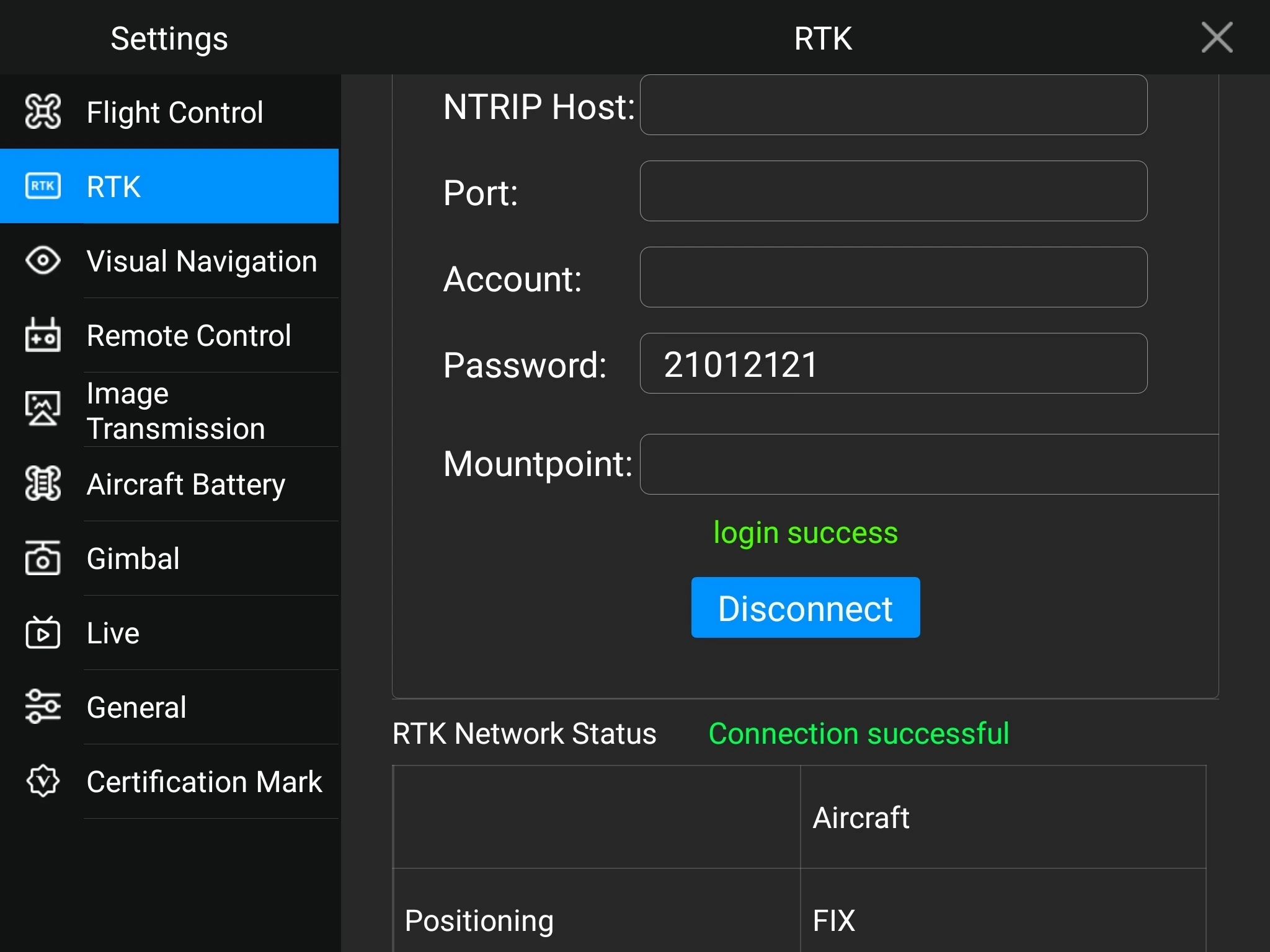
Schalten Sie die Option RTK Aircraft Feature ein. Wählen Sie unter RTK connection options (RTK-Verbindungsoptionen) die Option Custom Network RTK (Benutzerdefiniertes RTK-Netzwerk) und geben Sie die Ntrip-Anmeldedaten ein:
- Ntrip-Host: Die URL oder IP-Adresse des Ntrip-Casters.
- Port: Der Port, über den die Verbindung zum Caster hergestellt wird. Der Standardwert ist in der Regel 2101, sofern Ihr Anbieter keinen anderen Port angibt.
- Konto: Der Benutzername, der zur Authentifizierung beim Ntrip-Dienst verwendet wird. In manchen Fällen kann es sich dabei um Ihren Namen oder Ihre E-Mail-Adresse handeln.
- Passwort: Das mit dem Benutzernamen verknüpfte Passwort.
- Einhängepunkt: Der Name des vom Ntrip-Dienst bereitgestellten Korrekturstroms.
noteGeben Sie die Anmeldedaten ein, die Sie beim Zugriff auf Emlid Caster oder bei der Aktivierung der Option Lokales Ntrip (Local Ntrip) in Emlid Flow erhalten haben. Stellen Sie sicher, dass Sie die Anmeldedaten für den Rover verwenden.
-
Tippen Sie auf Anmelden (Login).
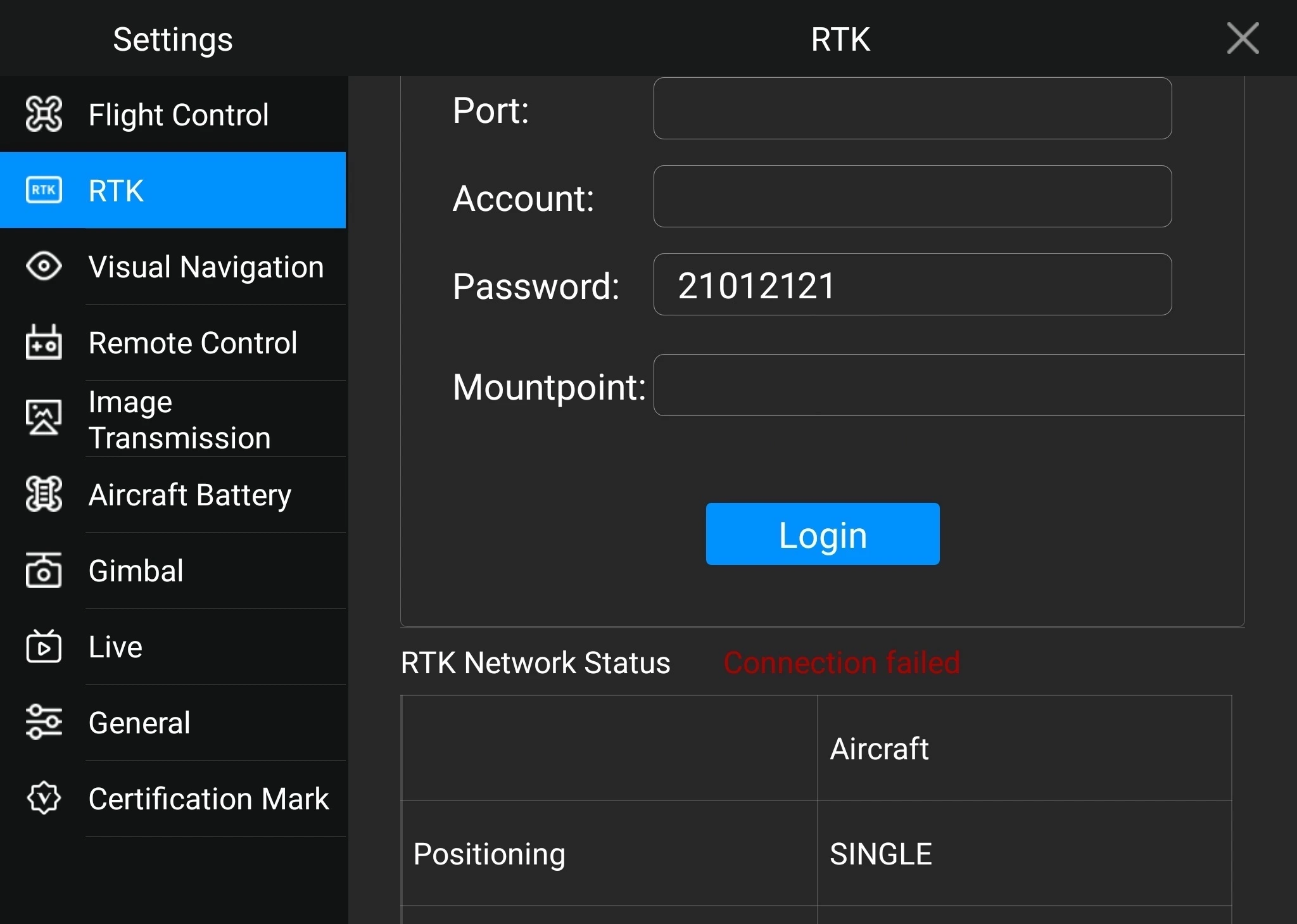
-
Die Meldung Anmeldung erfolgreich (login success) erscheint, wenn die Basis erfolgreich verbunden wurde. Der RTK-Netzwerkstatus (RTK Network Status) sollte in den Status Verbindung erfolgreich (Connection successful) wechseln.
Flug durchführen
Wenn Sie die Kommunikation zwischen Ihrem Reach und einer Drohne hergestellt haben, können Sie den Flug durchführen. Sorgen Sie für eine klare Sicht zum Himmel für die Autel EVO II Enterprise und fahren Sie mit der Mission fort.
Nach dem Flug können Sie die mit Geotags versehenen Bilder herunterladen und für weitere Kartierungen in einer Photogrammetrie-Software verwenden.
Um eine Karte mit Pix4DMapper zu erstellen, sehen Sie sich das Tutorial [Erstellen der Karte] (https://docs.emlid.com/reach/tutorials/post-processing-workflow/pix4d-tutorial) an.
Danksagungen
Wir möchten [Dave Pitman] (https://community.emlid.com/u/dpitman/) dafür danken, dass er seine Erfahrungen mit dem Einsatz der Autel Robotics-Drohne als Vermessungsgerät mit Reach RS2/RS2+ mit uns geteilt hat.