Autel EVO II Enterprise and Reach RS2/RS2+ base integration
This guide shows how to set up Reach RS2/RS2+ as a base for the Autel EVO II Enterprise drone to geotag drone images for further mapping in photogrammetry software.
It is also possible to use the Autel EVO II RTK Series drone with Reach RS2/RS2+ base.
Learn more about RTK and PPK in the guides below:
Overview
Autel EVO II Enterprise uses NTRIP to receive corrections, which allows you to use Reach as a base station. Reach can send NTRIP corrections via Emlid Caster through the Internet or using the Local NTRIP option in Emlid Flow without connection to the Internet.
To use the Local NTRIP option, the base and the rover should be connected to the same Wi-Fi network.
To set up your Reach as a base for the Autel EVO II Enterprise drone, you will need the following:
- Autel EVO II Enterprise drone as a rover
- Controller
- Reach RS2/RS2+ as a base
- A smartphone or tablet with the Emlid Flow app installed
- Internet connection on both Reach RS2/RS2+ and Autel Smart Controller if you use Emlid Caster
- Access to Emlid Caster
Workflow
Set up Reach RS2/RS2+ as base
Reach RS2/RS2+ can send NTRIP corrections via Emlid Caster or using the Local NTRIP option in Emlid Flow. The difference is that Emlid Caster requires an Internet connection, and Local NTRIP allows you to set up RTK without an internet connection. Select the method depending on your use case and follow the steps below.
Set up Reach RS2/RS2+ as base using Local NTRIP
To set up your Reach as a base for the Autel EVO II Enterprise drone using the Local NTRIP option in Emlid Flow, follow the steps below:
-
Place your Reach on the tripod and provide it with a clear sky view.
tipLearn more about base placement in the Placement and Choosing base setup method articles.
-
Open Emlid Flow and connect to your Reach.
-
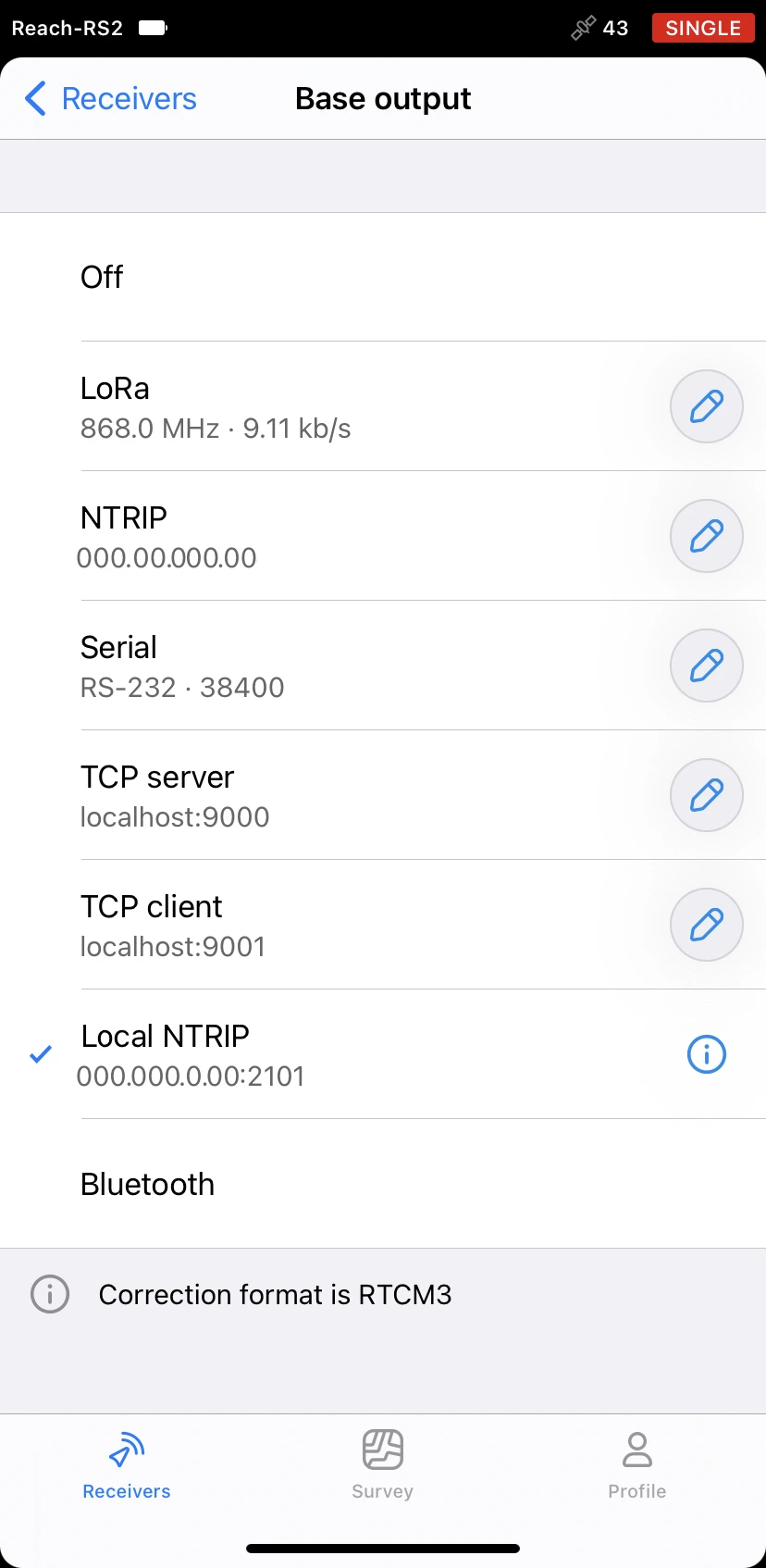
Tap Base output and select the Local NTRIP option.
-
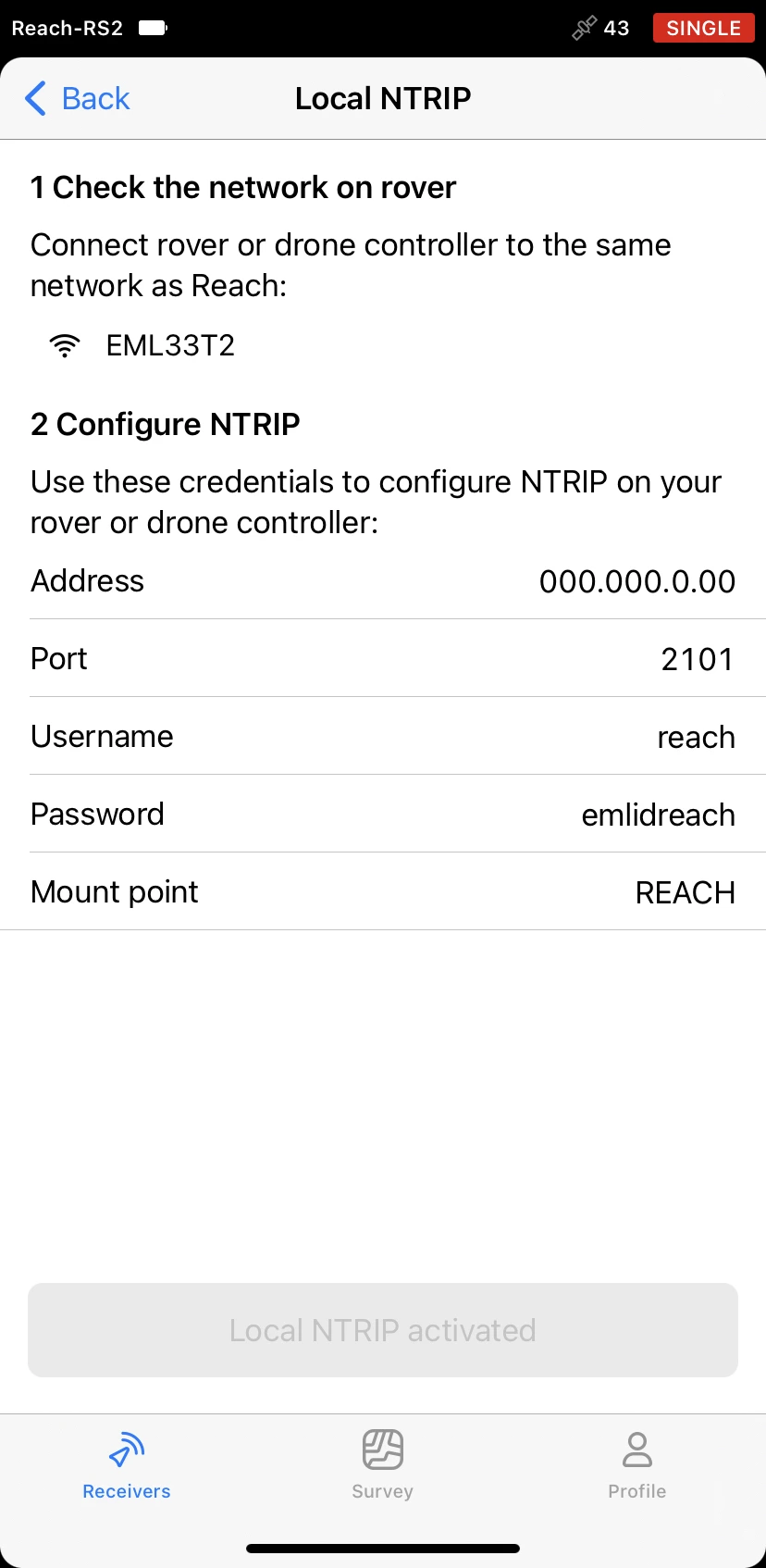
Tap the Information button to access the page with rover credentials.
-
Connect Autel Smart Controller to the same Wi-Fi network as your Reach.
To ensure proper connection, keep the distance between the drone’s controller and your base within several meters.
Set up Reach RS2/RS2+ as base using Emlid Caster
To set up your Reach as a base for Autel EVO II Enterprise using Emlid Caster, you need to get access to Emlid Caster and get NTRIP credentials. Follow the steps below:
-
Access Emlid Caster and get NTRIP credentials for both base and rover.
tipTo learn more, check the Emlid Caster docs.
-
Place your Reach on the tripod and provide it with a clear sky view.
tipLearn more about base placement in the Placement and Choosing base setup method guides.
-
Open Emlid Flow and connect to your receiver.
-
Connect your Reach to the Internet.
tipTo learn more about connecting your Reach RS2/RS2+ to the Internet, check the following guides:
-
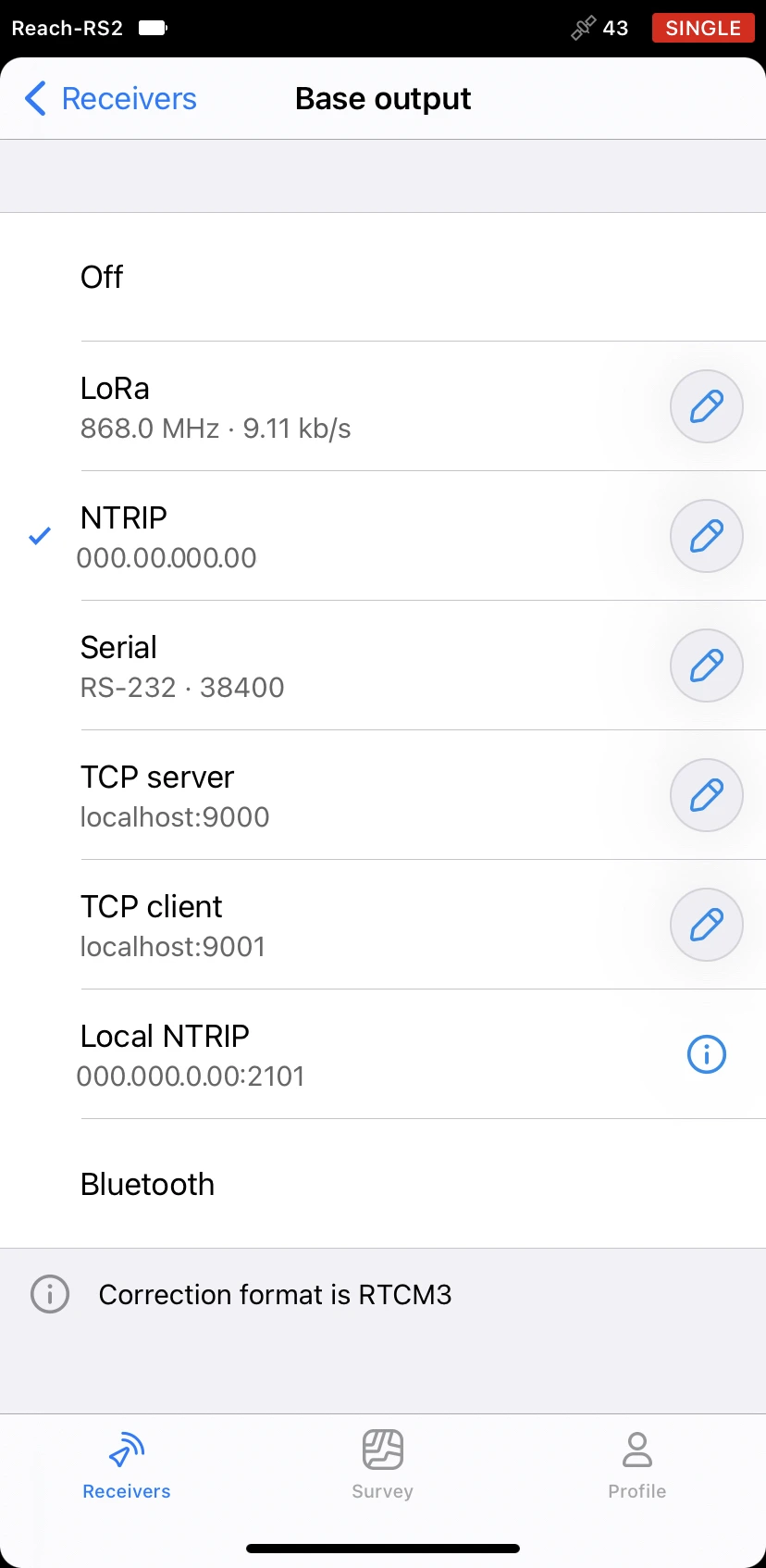
On the Receivers screen, tap Base output and select the NTRIP option.
-
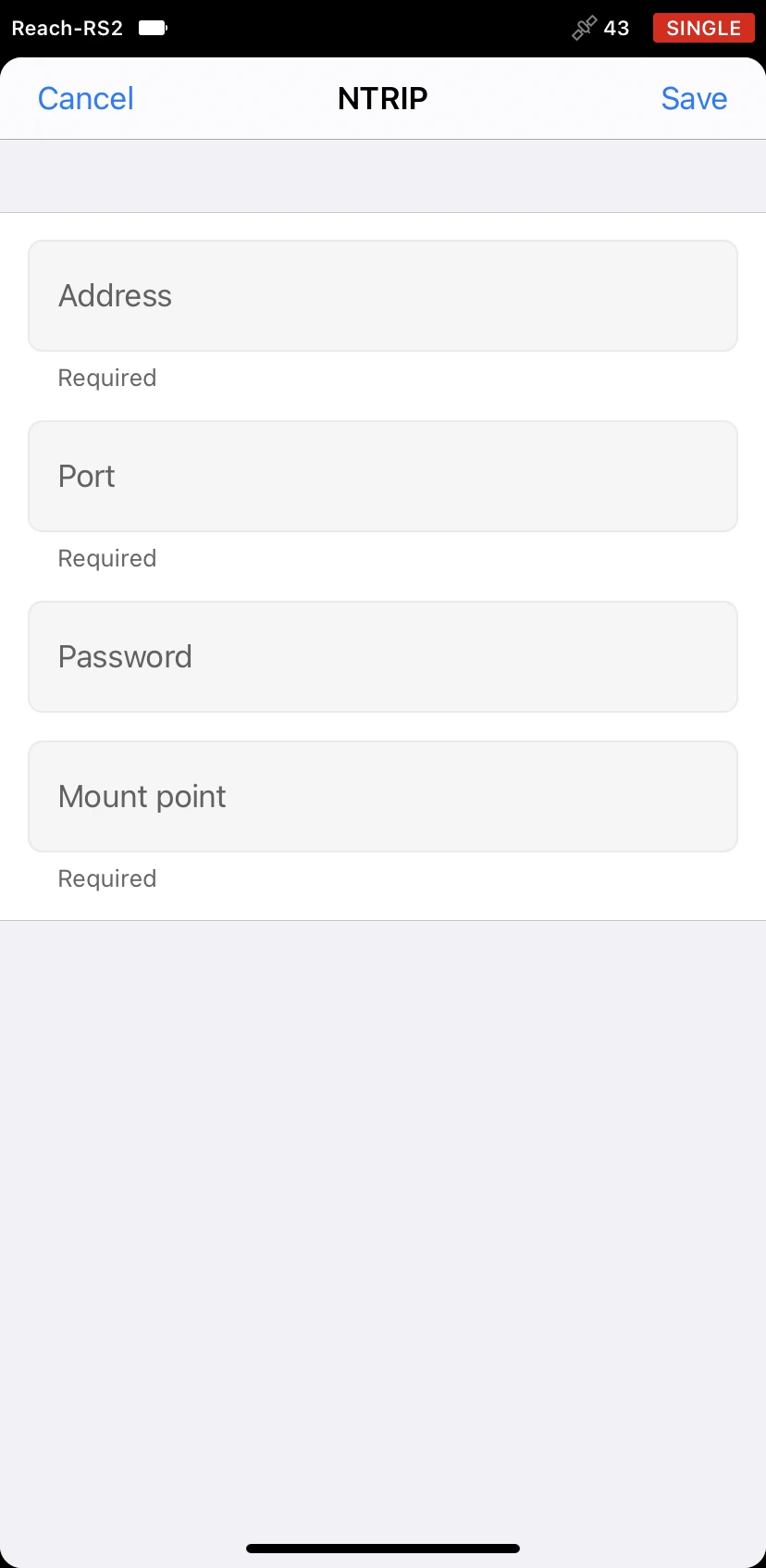
Tap the Edit button and insert the NTRIP credentials for the base:
-
Address: The URL or IP address of the NTRIP caster.
-
Port: The port used to connect to the caster. The default value is usually 2101 unless your provider specifies a different port.
-
Username: The username used to authenticate with the NTRIP service. In some cases, it may be your name or email address.
-
Password: The password associated with the username.
-
Mount Point: The name of the correction stream provided by the NTRIP service.
tipTo find out which mount point suits you better, check the website of your NTRIP provider. In general, shorter distances to the reference station improve RTK performance.
noteTo ensure successful corrections transmitting, double-check the credentials you entered.
-
Once you place and set up your base, you can proceed to the drone’s setup.
Set up Autel EVO II Enterprise as rover
To set up your Autel EVO II Enterprise as a rover, follow the steps below:
-
Attach the RTK Module to your drone.
tipSkip this step, if you use the Autel EVO II RTK Series drone.
-
Connect the controller to your drone.
-
Open the Autel Explorer app. Tap the Camera button.
-
To open the Settings screen, tap the gear icon in the top right corner.
-
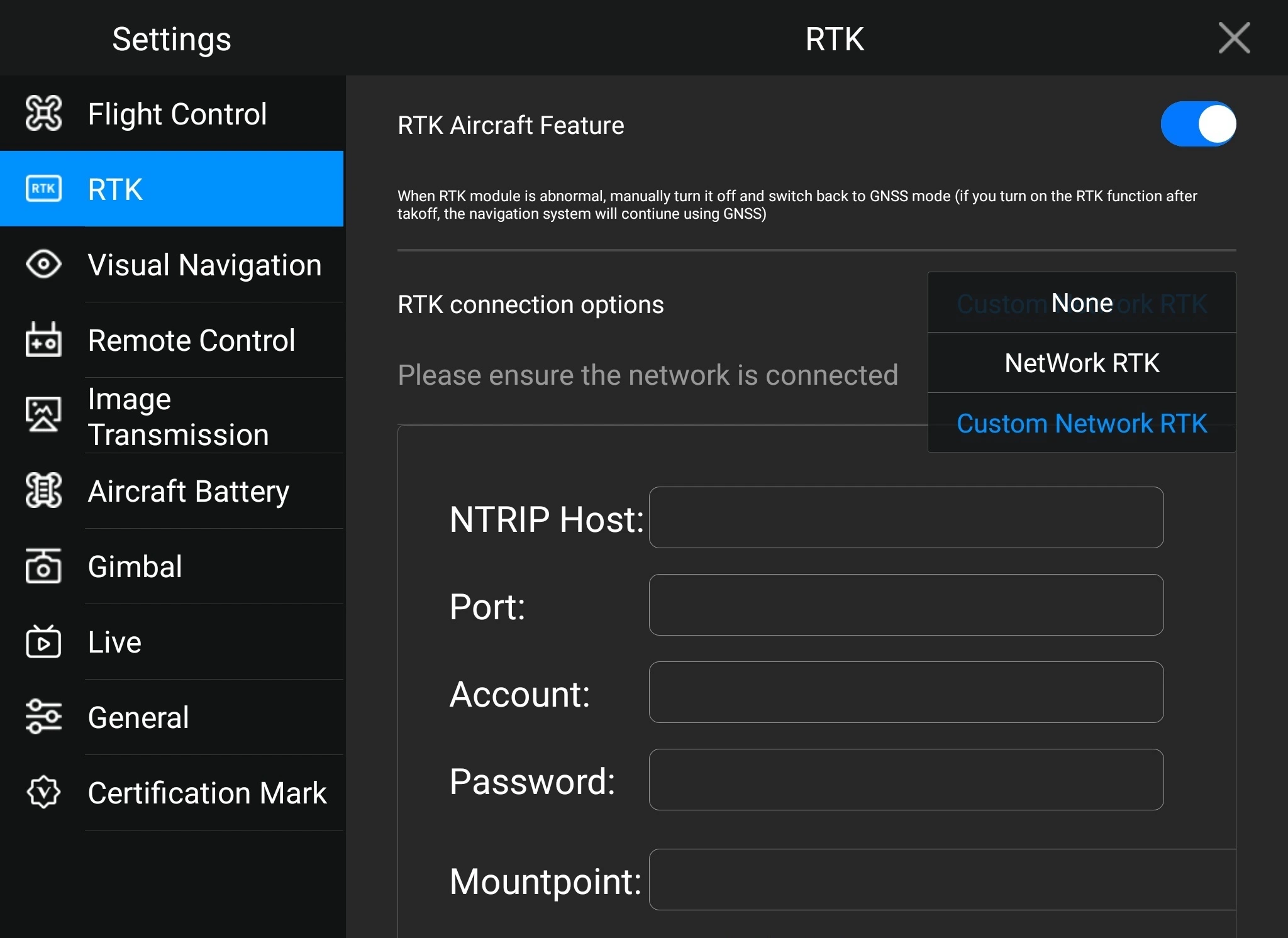
Go to the RTK screen.
-
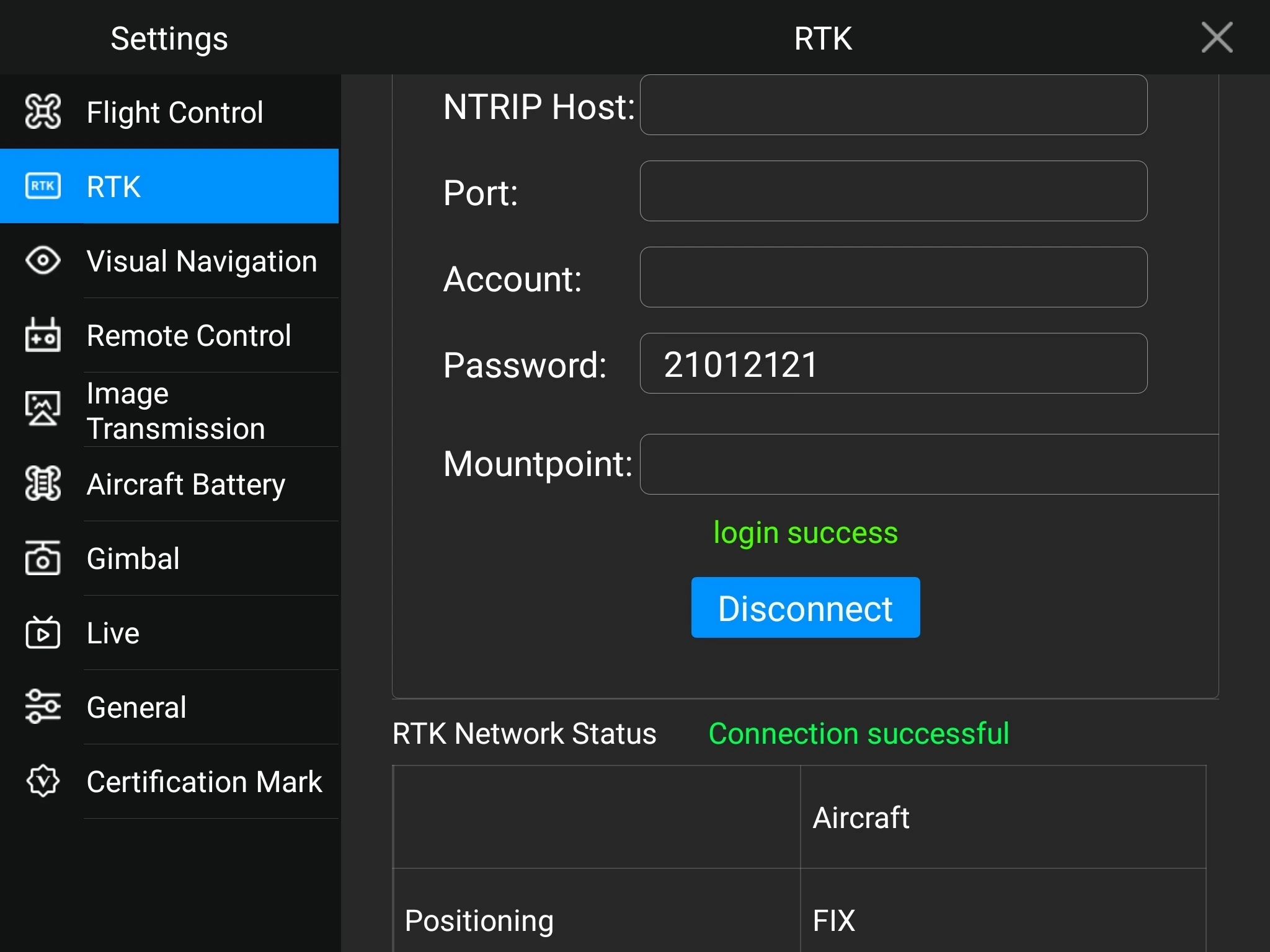
Turn on the RTK Aircraft Feature option. In RTK connection options, choose Custom Network RTK option and fill in the NTRIP credentials:
- NTRIP Host: The URL or IP address of the NTRIP caster.
- Port: The port used to connect to the caster. The default value is usually 2101 unless your provider specifies a different port.
- Account: The username used to authenticate with the NTRIP service. In some cases, it may be your name or email address.
- Password: The password associated with the username.
- Mount Point: The name of the correction stream provided by the NTRIP service.
noteFill in the credentials you obtained when accessing Emlid Caster or enabling the Local NTRIP option in Emlid Flow. Make sure that you use the credentials for the rover.
-
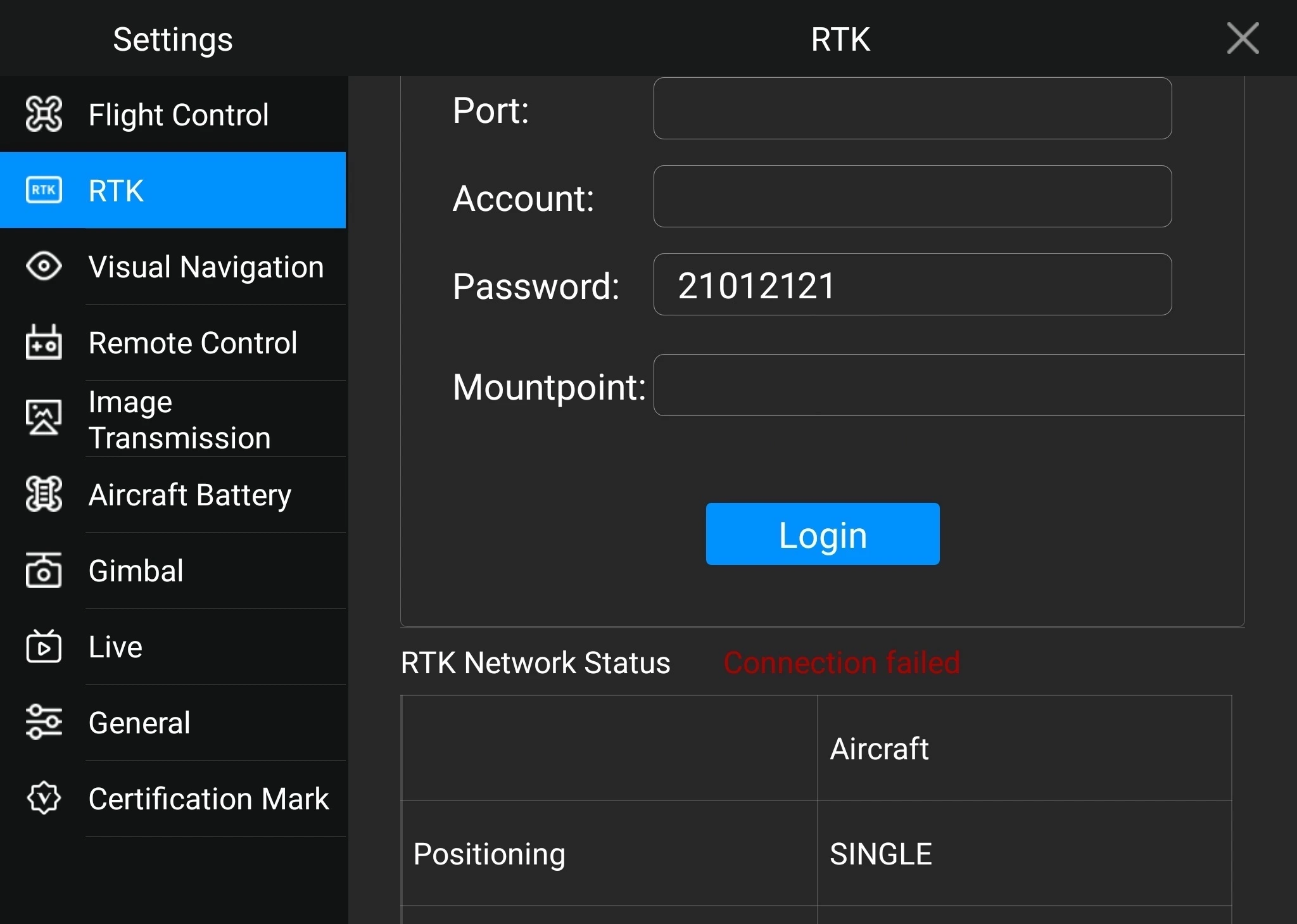
Tap Login.
-
The login success message will appear if the base is successfully connected. RTK Network Status should change to the Connection successful state.
Perform Flight
When you set up communication between your Reach and a drone, you can perform the flight. Provide Autel EVO II Enterprise with a clear sky view and proceed to the mission.
Once the flight is completed, you can download the geotagged images and use them for further mapping in photogrammetry software.
To create a map using Pix4DMapper, check the Creating the map tutorial.
Credits
We want to thank Dave Pitman for sharing his experience of using the Autel Robotics drone as a survey tool with Reach RS2/RS2+.