Integración de base Autel EVO II Enterprise y Reach RS2/RS2
Esta guía muestra cómo configurar Reach RS2/RS2+ como base para el dron Autel EVO II Enterprise para geoetiquetar imágenes de drones para su posterior mapeo en software de fotogrametría.
También es posible utilizar el dron Autel EVO II RTK Series con la base Reach RS2/RS2+.
Obtenga más información sobre RTK y PPK en las siguientes guías:
Resumen
Autel EVO II Enterprise utiliza NTRIP para recibir correcciones, lo que le permite utilizar Reach como estación base. Reach puede enviar correcciones NTRIP mediante Emlid Caster a través de Internet o utilizando la opción NTRIP local en Emlid Flow sin conexión a Internet.
Para utilizar la opción NTRIP local, la base y el rover deben estar conectados a la misma red Wi-Fi.
Para configurar su Reach como base para el dron Autel EVO II Enterprise, necesitará lo siguiente:
- Drone Autel EVO II Enterprise como rover
- Controlador
- Reach RS2/RS2+ como base
- Un smartphone o una tableta con la aplicación Emlid Flow instalada
- Conexión a Internet tanto en Reach RS2/RS2+ como en Autel Smart Controller si utiliza Emlid Caster
- Acceso a Emlid Caster
Flujo de trabajo
Configurar Reach RS2/RS2+ como base
Reach RS2/RS2+ puede enviar correcciones NTRIP a través de Emlid Caster o utilizando la opción NTRIP local en Emlid Flow. La diferencia es que Emlid Caster requiere una conexión a Internet y NTRIP local permite configurar RTK sin conexión a Internet. Seleccione el método en función de su caso de uso y siga los pasos que se indican a continuación.
Configurar Reach RS2/RS2+ como base utilizando el NTRIP local
Para configurar su Reach como base para el dron Autel EVO II Enterprise utilizando la opción NTRIP Local en Emlid Flow, siga los pasos que se indican a continuación:
-
Coloque su Reach en el trípode con una vista despejada del cielo.
tipObtén más información sobre la colocación de las bases en los artículos Colocación y Elegir el método de configuración de la base.
-
Abra Emlid Flow y conéctese a su Reach.
-
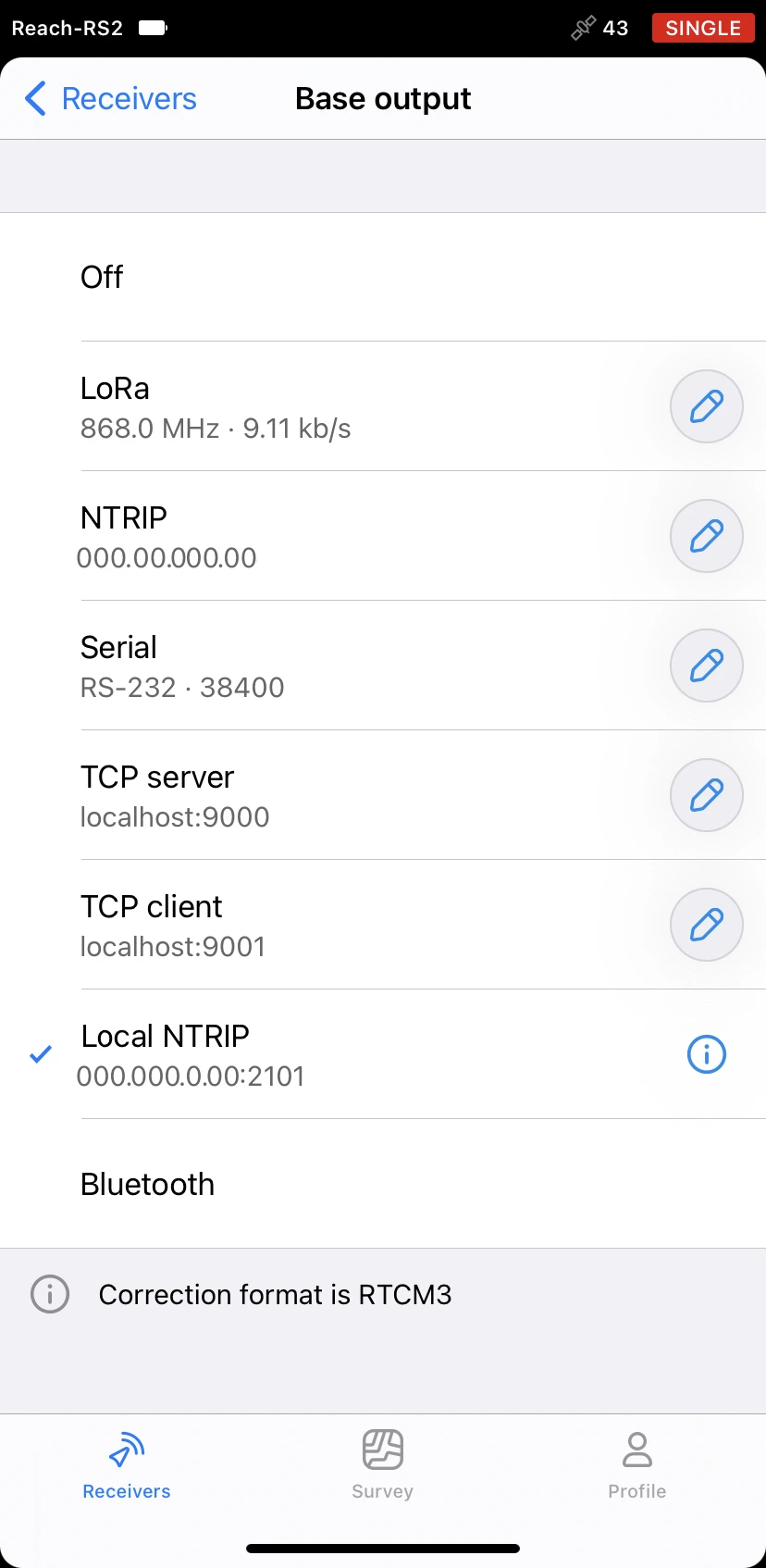
Pulse Salida de la base y seleccione la opción NTRIP local.
-
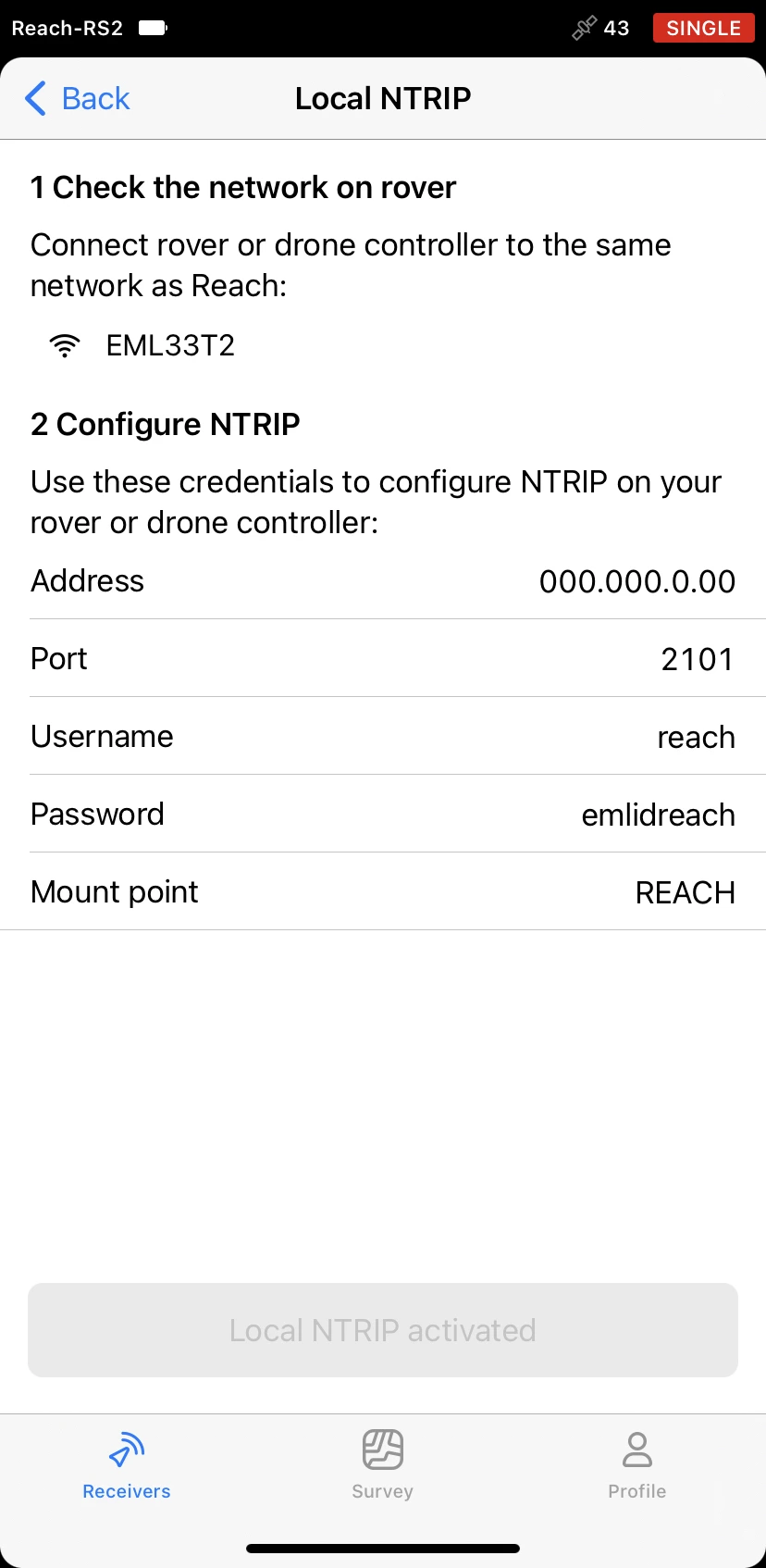
Pulse el botón Información para acceder a la página con las credenciales del rover.
-
Conecte Autel Smart Controller a la misma red Wi-Fi que su Reach.
notePara garantizar una conexión adecuada, mantenga una distancia de varios metros entre el controlador del dron y su base.
Configurar Reach RS2/RS2+ como base utilizando Emlid Caster
Para configurar su Reach como base para Autel EVO II Enterprise usando Emlid Caster, necesita obtener acceso a Emlid Caster y obtener credenciales NTRIP. Siga los pasos que se indican a continuación:
-
Acceda a Emlid Caster y consiga las credenciales de NTRIP tanto para la base como para el rover.
tipPara obtener más información, consulte la [documentación] de Emlid Caster (https://docs.emlid.com/emlid-caster/getting-started-emlid-caster).
-
Coloque su Reach en el trípode con una vista despejada del cielo.
tipObtén más información sobre la colocación de las bases en las guías Colocación y Elegir el método de configuración de la base.
-
Abra Emlid Flow y conéctese a su receptor.
-
Conecte su Reach a Internet.
tipPara obtener más información sobre cómo conectar su Reach RS2/RS2+ a Internet, consulte las siguientes guías:
-
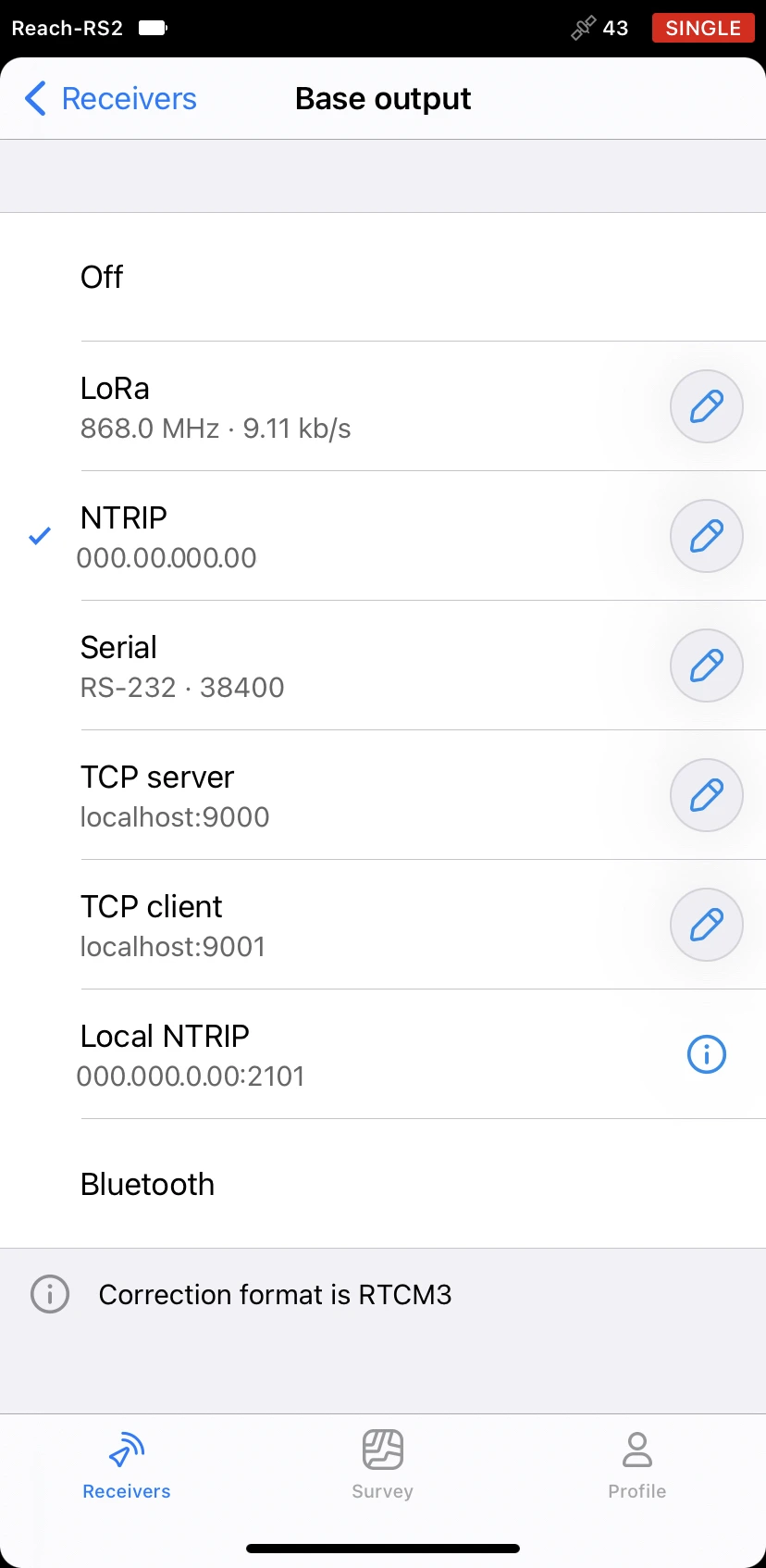
En la pantalla Receptores, pulse Salida de la base y seleccione la opción NTRIP.
-
Pulse el botón Editar e introduzca las credenciales NTRIP de la base.
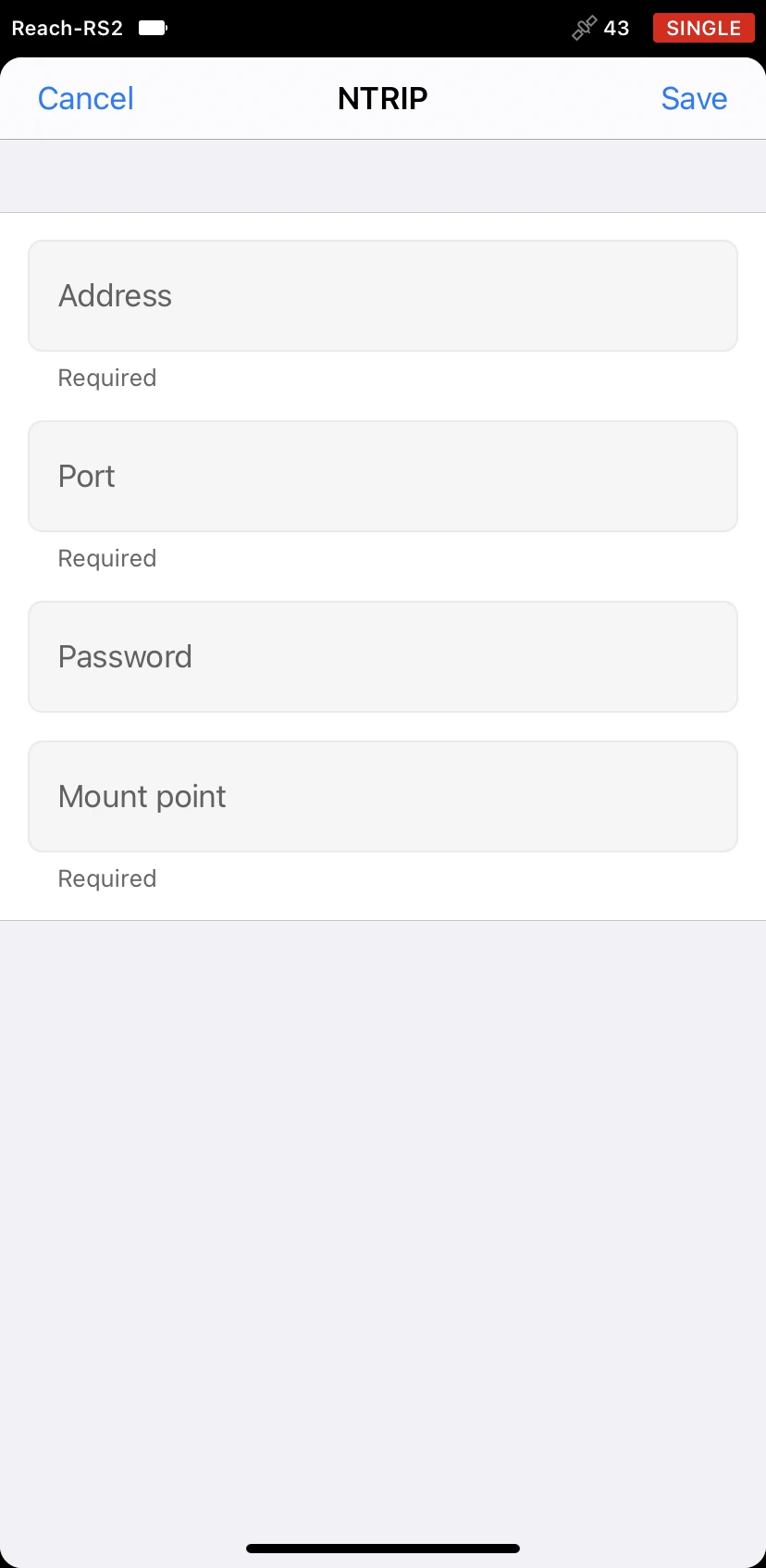
notePara garantizar el éxito de la transmisión de las correcciones, vuelva a comprobar las credenciales introducidas.
Una vez coloque y configure su base, puede proceder a la configuración del dron.
Configurar Autel EVO II Enterprise como rover
Para configurar su Autel EVO II Enterprise como un rover, siga los pasos que se indican a continuación:
-
Conecte el módulo RTK a su dron.
tipOmita este paso si utiliza el dron Autel EVO II RTK Series.
-
Conecte el controlador a su dron.
-
Abra la aplicación Autel Explorer. Pulse el botón Cámara.
-
Para abrir la pantalla Configuración, pulse el icono del engranaje en la esquina superior derecha.
-
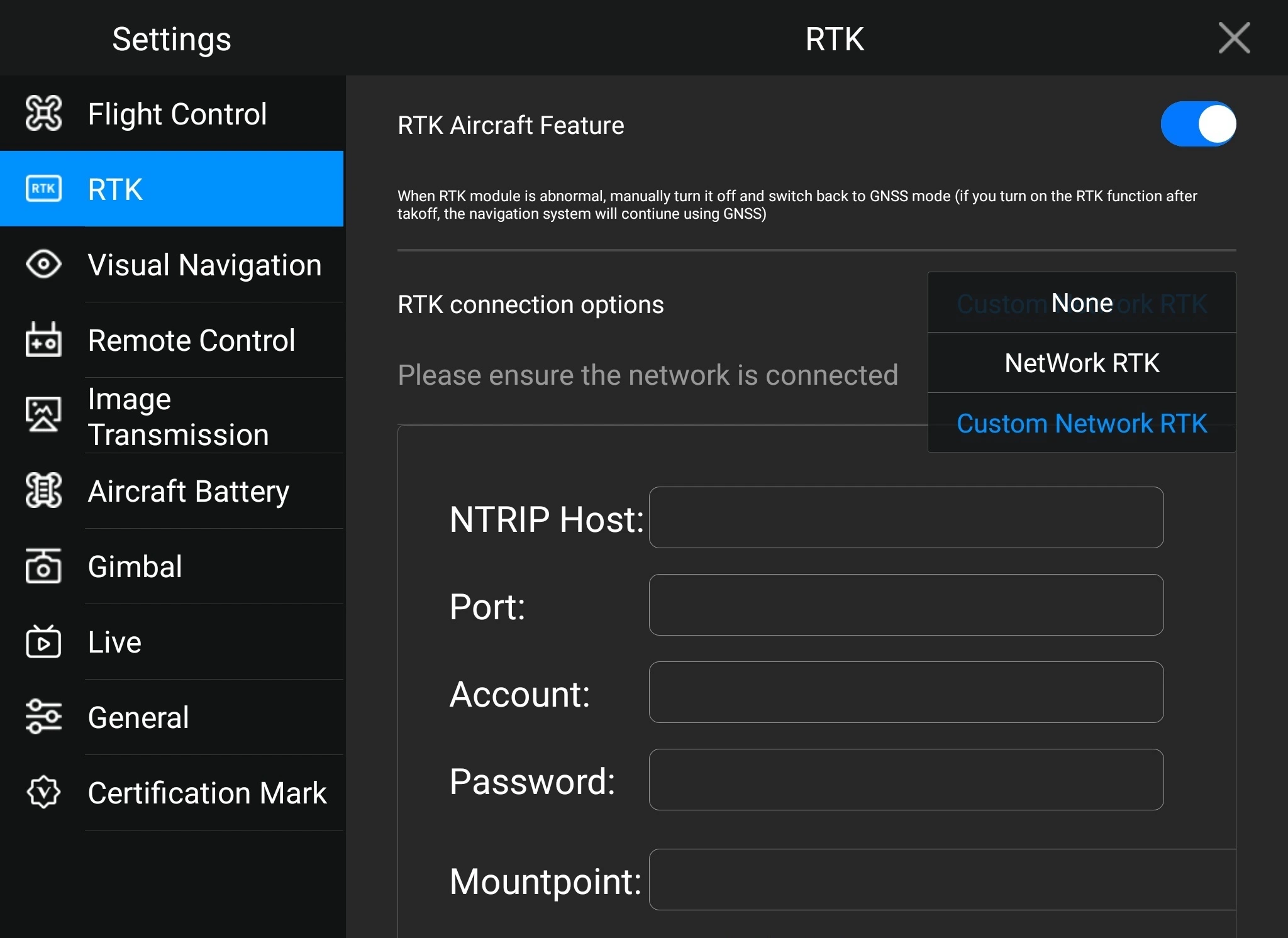
Vaya a la pantalla RTK.
-
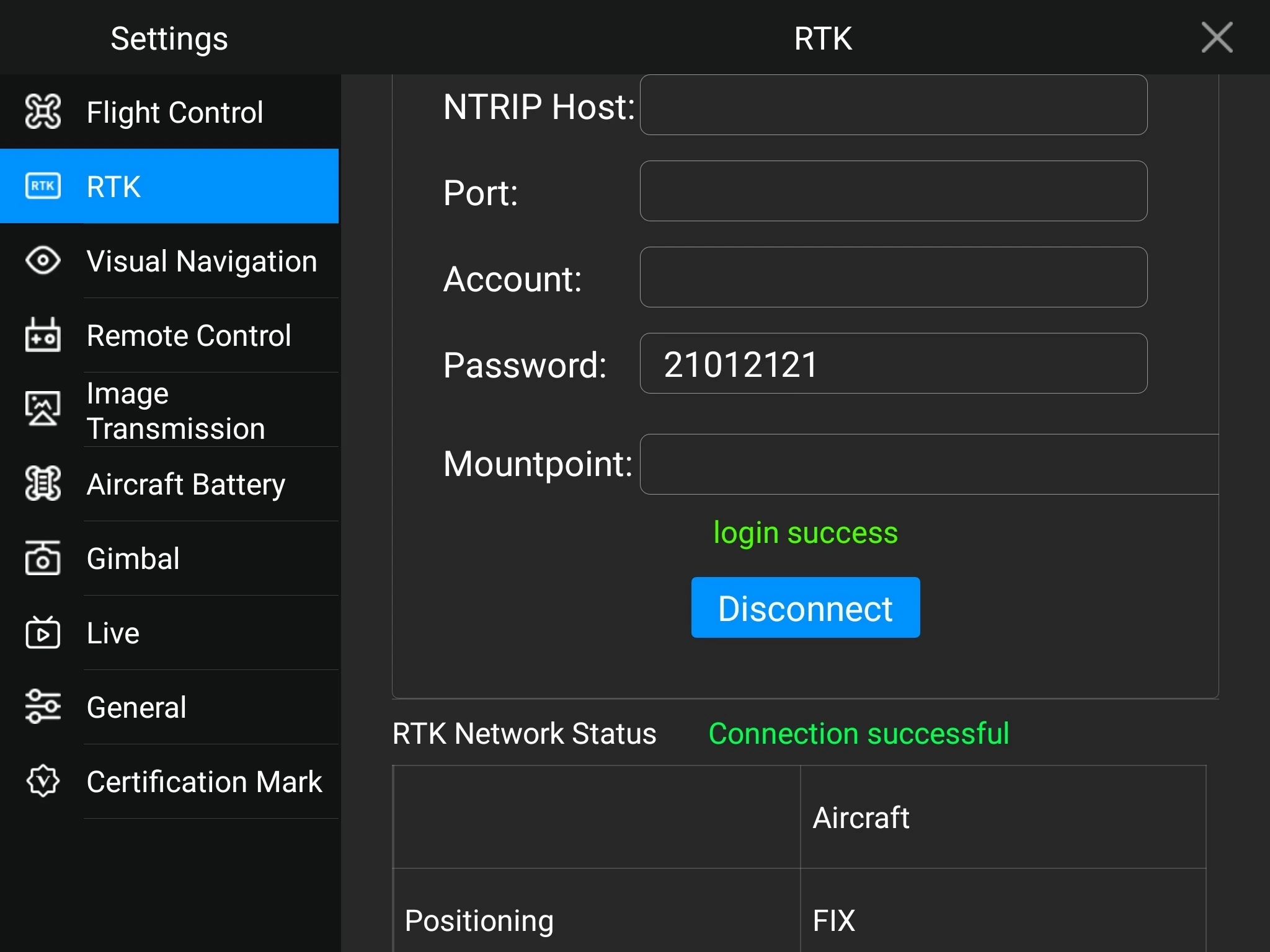
Active la opción Función de aeronave RTK. En Opciones de conexión RTK, elija la opción Red RTK personalizada e introduzca las credenciales NTRIP.
noteIntroduzca las credenciales que obtuvo al acceder a Emlid Caster o al activar la opción NTRIP local en Emlid Flow. Asegúrese de que usa las credenciales para el rover.
-
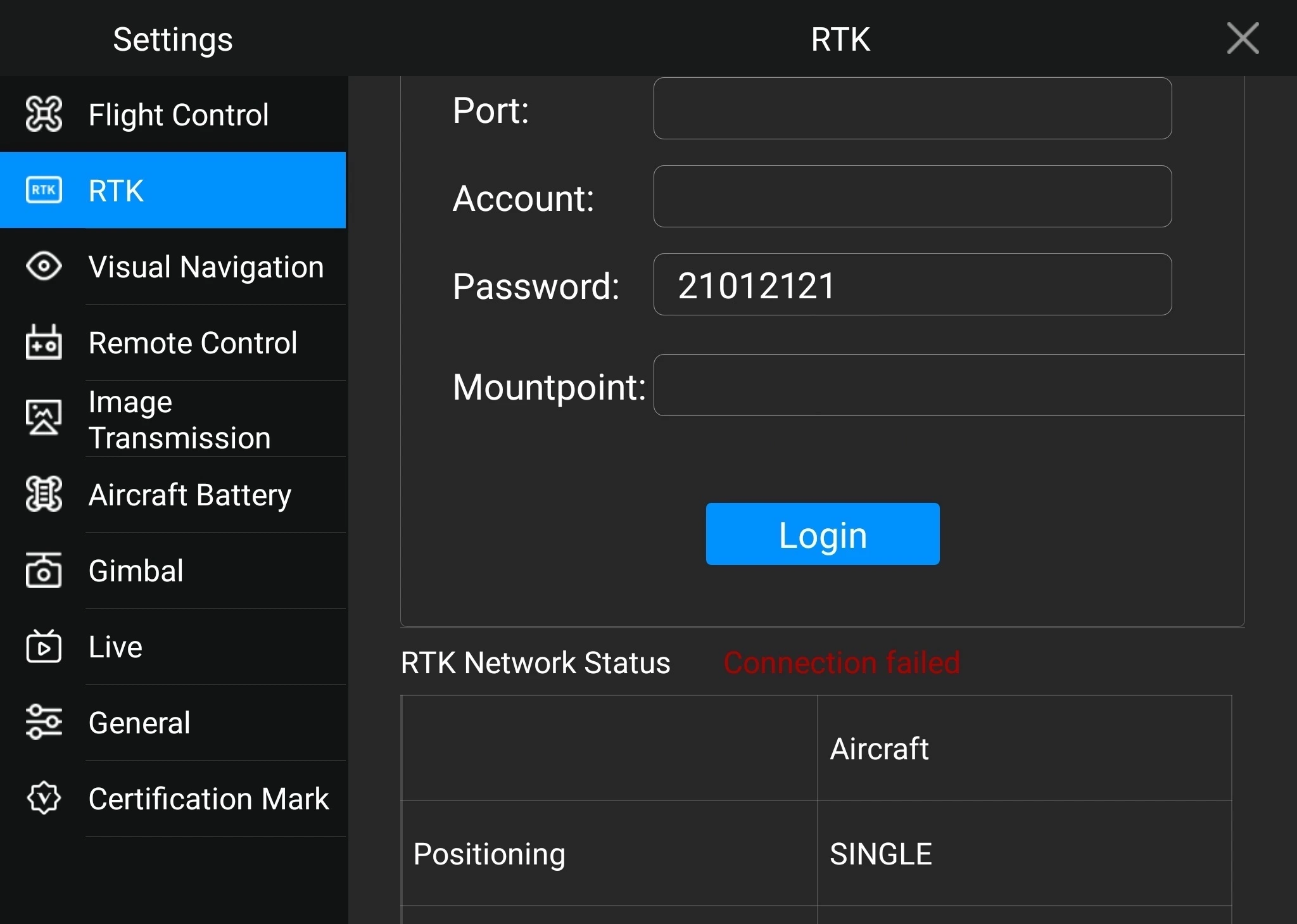
Pulse Iniciar sesión.
-
El mensaje inicio de sesión correcto aparecerá si la base se conecta correctamente. El Estado de red RTK debería cambiar al estado Conexión correcta.
Realizar el vuelo
Cuando establezca la comunicación entre su Reach y un dron, podrá realizar el vuelo. Proporcione al Autel EVO II Enterprise una vista despejada del cielo y proceda a la misión.
Una vez finalizado el vuelo, puede descargar las imágenes geoetiquetadas y utilizarlas para cartografiarlas con un software de fotogrametría.
Para crear un mapa con Pix4DMapper, consulte el tutorial Crear el mapa.
Créditos
Queremos darle las gracias a Dave Pitman por compartir su experiencia de uso del dron de Autel Robotics como herramienta de levantamientos con Reach RS2/RS2+.