Utilizzo della stazione base Reach RS2/RS2+ per i sistemi LiDAR YellowScan
Questa guida spiega come registrare un registro di dati grezzi sul proprio Reach RS2/RS2+ utilizzato come stazione base per i sistemi LiDAR YellowScan per la mappatura con droni e come prepararlo per ottenere il file SBET della traiettoria corretta per l'elaborazione successiva nel software CloudStation.
Panoramica
È possibile utilizzare il proprio Reach RS2/RS2+ come parte della configurazione del sistema LiDAR YellowScan per la mappatura con droni. Durante una missione di volo con drone, Reach RS2/RS2+ funge da stazione base che registra i dati di osservazione RINEX. Questi dati, insieme ai dati grezzi della traiettoria del drone, vengono utilizzati per ottenere un file della traiettoria di volo corretta, SBET, nel software Applanix PosPac. Il file SBET ottenuto viene quindi elaborato insieme ai dati dello scanner nel software CloudStation per ottenere la nuvola di punti georeferenziata. Questa guida riguarda solo la configurazione della base Reach RS2/RS2+ e la registrazione di un registro di osservazione RINEX su di essa, e l'ulteriore preparazione del registro per l'elaborazione in Applanix POSPac per garantire la generazione di un file SBET della traiettoria di volo corretta.
Flusso di lavoro
Per registrare i registri sulla base Reach RS2/RS2+ e prepararli per l'elaborazione successiva nel software Applanix POSPac, seguire questi passaggi:
-
Nell'app Emlid Flow, configurare il proprio Reach come base. Nelle impostazioni GNSS, selezionare gli stessi sistemi satellitari presenti sul proprio drone. Mantieni la frequenza di aggiornamento predefinita di 5 Hz.
suggerimentoPer saperne di più sulla configurazione della base, consultare la guida Posizionamento.
-
Configurare la registrazione del registro su Reach. In Logging settings (Impostazioni di registrazione), selezionare il formato RINEX, specificare l'altezza dell'antenna e impostare l'intervallo di registrazione su 1 s. Si consiglia di avviare il volo 2 minuti dopo l'inizio della registrazione del registro e di tagliarlo in seguito. Questo migliorerà la qualità del registro per l'elaborazione successiva.
suggerimentoÈ possibile imparare a registrare i registri sulla propria base Reach e a scaricarli nella guida Come registrare i dati per il PPK.
-
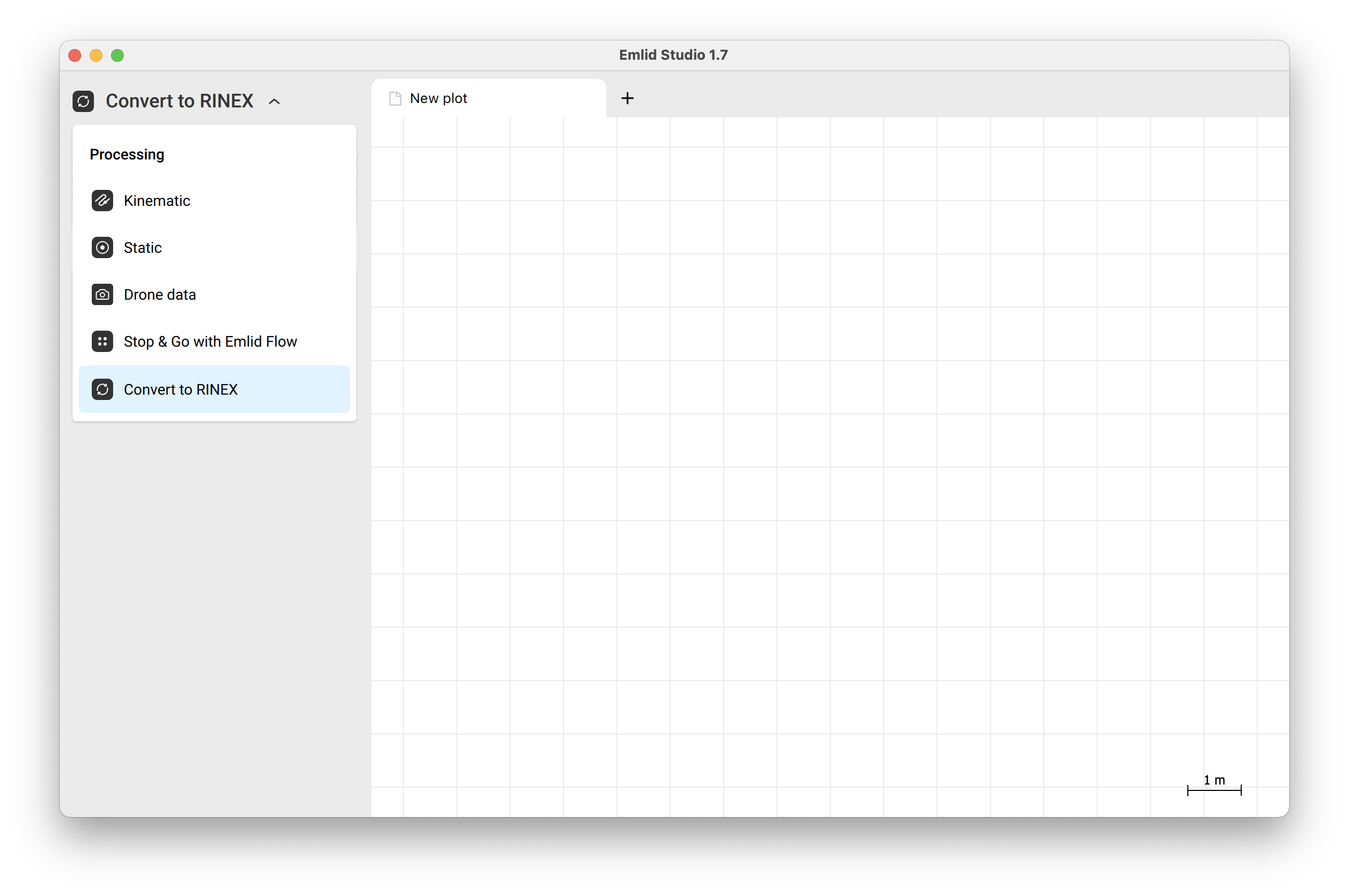
Aprire Emlid Studio, selezionare Convert to RINEX (Converti in RINEX).
notePer saperne di più su Emlid Studio e scaricarlo gratuitamente, visitare la pagina di destinazione di Emlid Studio.
-
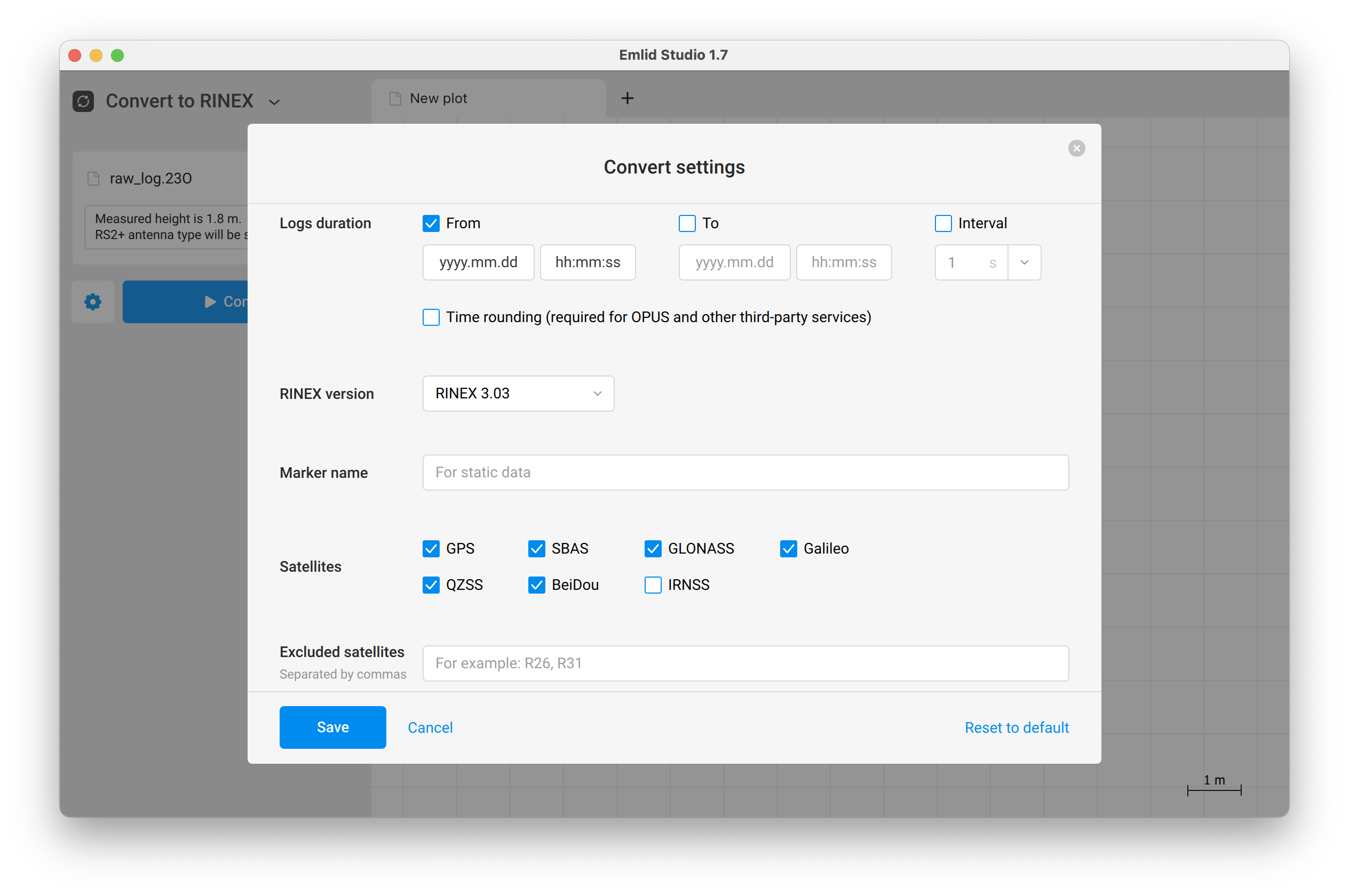
Caricare il proprio registro su Emlid Studio e toccare il pulsante blu a forma di ingranaggio per accedere alle impostazioni di elaborazione.
-
Nella sezione Logs duration (Durata dei log), specificare un ritardo di 2 minuti dall'inizio della registrazione del log per tagliare il log e garantire l'elaborazione in Applanix POSPac.
Una volta ottenuto il registro tagliato, è possibile caricarlo insieme al file T04 della traiettoria grezza del proprio rilievo LiDAR su Applanix POSPac per ottenere il file SBET della traiettoria corretta. Quindi è possibile caricarlo su CloudStation per generare un file LAS.