Guida RTK senseFly
Panoramica
In questo tutorial, troverete le informazioni su come effettuare rilievi in RTK con i droni senseFly e Reach RS2/RS2+.
Una guida passo-passo è disponibile anche sulla senseFly Knowledge Base.
Configurazione di Reach RS2/RS2+
In questa parte, spiegheremo come configurare Reach RS2/RS2+ per trasmettere le correzioni al PC tramite Bluetooth.
Posizionamento del ricevitore Reach RS2/RS2+
Il video seguente mostra come posizionare la base Reach RS2/RS2+ su un punto noto.
Per scoprire altri modi per posizionare la stazione base locale, consultare la guida Posizionamento della base.
I passaggi generali per il posizionamento del ricevitore base sono descritti di seguito.
-
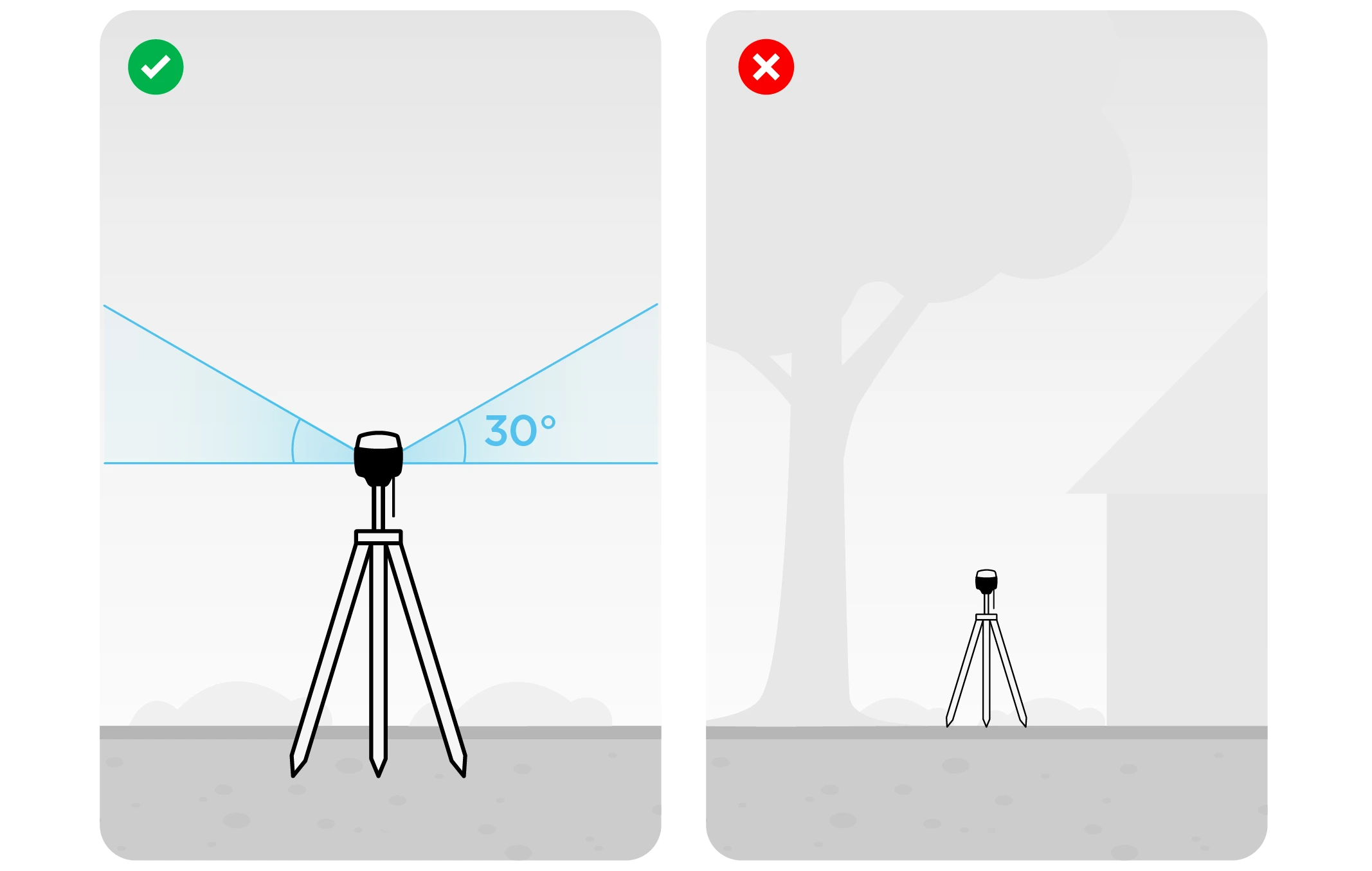
Assicurarsi di scegliere una posizione appropriata per posizionare la stazione base Reach RS2/RS2+. Osservare le 2 immagini sottostanti. L'immagine a sinistra mostra le condizioni desiderabili per la posizione della base. Quella a destra è un esempio di cattive condizioni ambientali, come una vista ridotta del cielo, possibili ostruzioni o vegetazione nelle vicinanze.
-
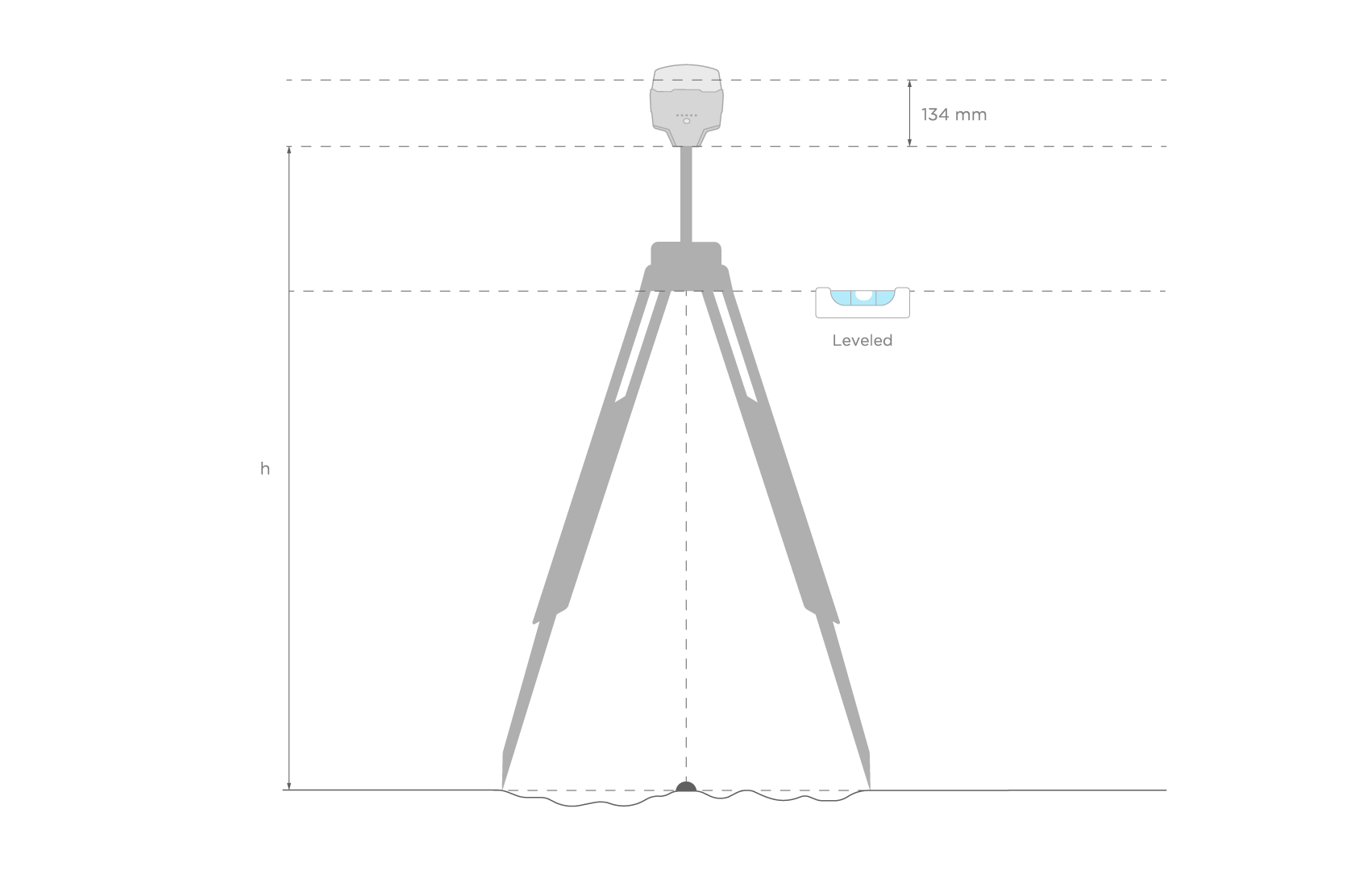
Assicurarsi che il Reach RS2/RS2+ sia posizionato precisamente sopra il punto marcato sul treppiede e livellato.
-
Se si impostano manualmente le coordinate della base, misurare l'offset dell'altezza dell'antenna.
noteL'altezza dell'antenna viene misurata come la distanza tra il contrassegno e il punto di riferimento dell'antenna (ARP).
Per il Reach RS2/RS2+, considerare l'altezza dell'antenna come la distanza tra il contrassegno e la parte inferiore del Reach RS2/RS2+ (h nella figura sottostante) più 134 mm.
noteSe si richiede una precisione assoluta a livello centimetrico, è necessario calcolare una coordinata di base assoluta.
Se si richiede una precisione relativa a livello centimetrico, è possibile calcolare la media della posizione della base.
Associazione con il PC
-
Aprire Emlid Flow e connettersi al proprio Reach.
Passaggi per la connessione tramite hotspotPer saperne di più, consultare la guida Connessione a Reach.
-
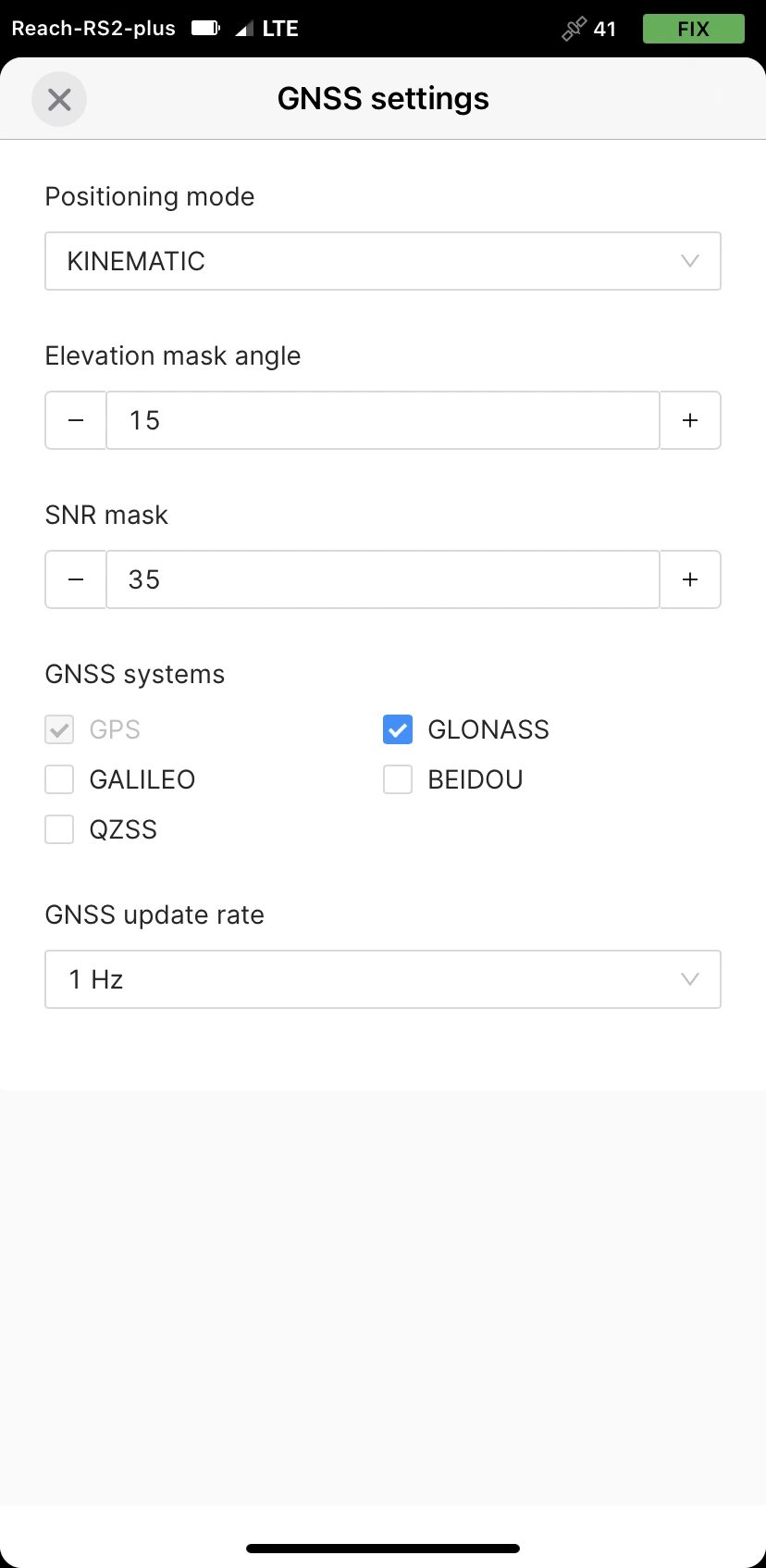
Nella schermata Settings (Impostazioni), toccare GNSS settings (Impostazioni GNSS).
-
Selezionare le costellazioni GNSS come segue.
notePer lavorare con i droni eBee, abilitare GPS e GLONASS a 1 Hz.
-
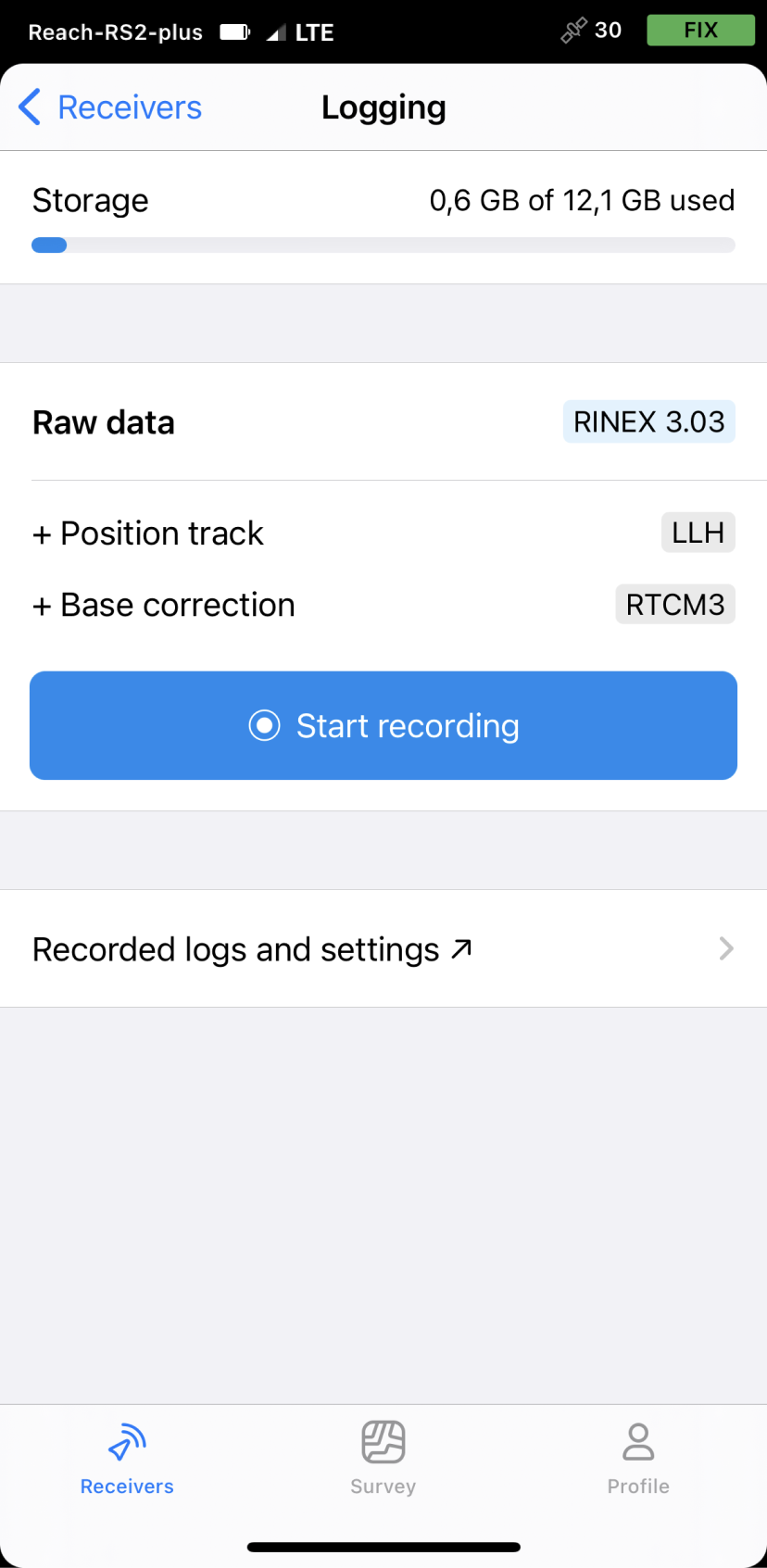
Tornare alla schermata Ricevitori e toccare Registrazione.
-
Toccare il pulsante Recorded logs and settings (Log e impostazioni registrati).
-
Per configurare la registrazione, toccare il pulsante blu a forma di ingranaggio.
-
Nel menu a discesa Format and presets (Formato e preimpostazioni), scegliere UBX. Applicare le modifiche e chiudere la schermata Logging (Registrazione).
-
Andare su Settings (Impostazioni) e toccare Bluetooth.
-
Abilitare il Bluetooth toccando il pulsante Turn on Bluetooth (Attiva il Bluetooth).
-
Toccare Discoverability (Visibilità) e attivare l'opzione Discoverability (Visibilità). Toccare Save (Salva) per applicare le modifiche.
-
Abilitare il Bluetooth sul PC.
-
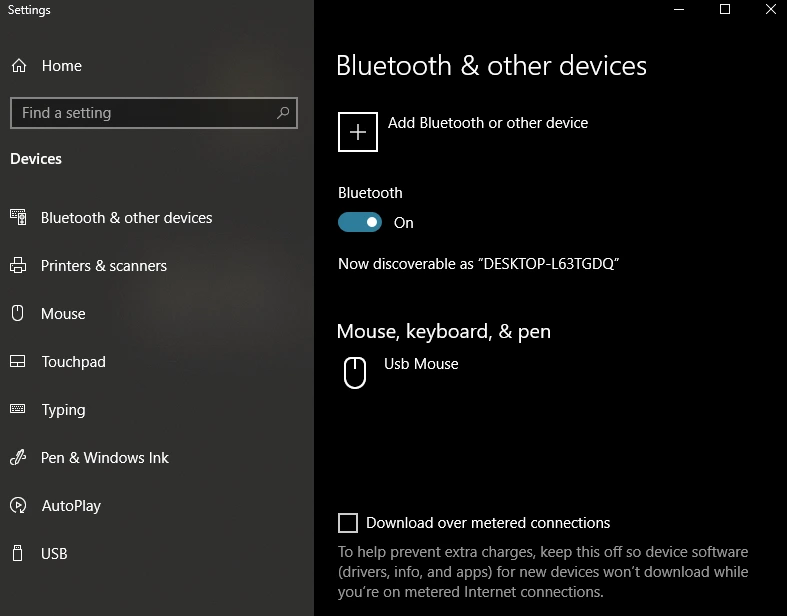
Aprire le impostazioni Bluetooth.
-
Fare clic su Add Bluetooth or other device (Aggiungi Bluetooth o altro dispositivo).
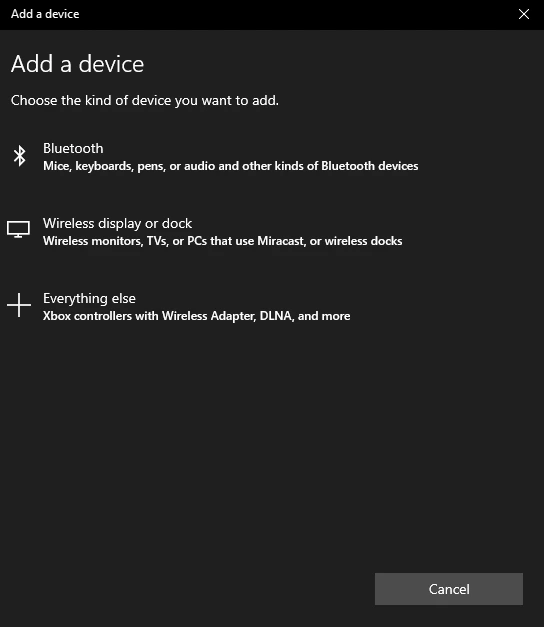
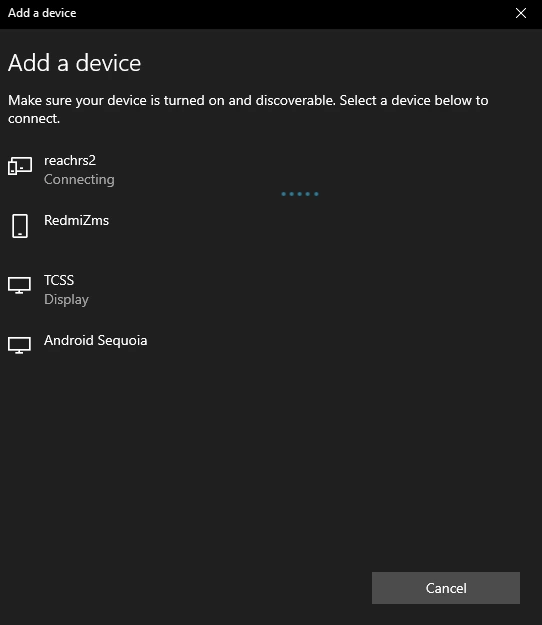
- Scegliere l'opzione Bluetooth nella finestra Add a device (Aggiungi un dispositivo).
- Assicurarsi che il Reach RS2/RS2+ sia rilevabile e visibile nell'elenco dei dispositivi.
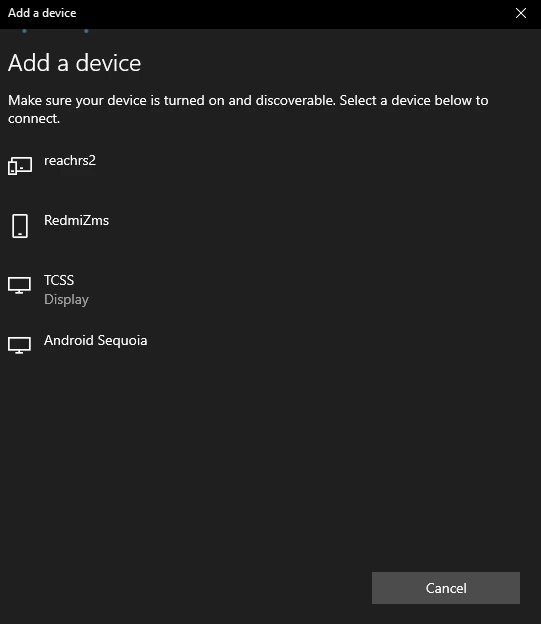
- Una volta visualizzato il Reach RS2/RS2+ nell'elenco, connettersi a esso.
Se la connessione riesce, si riceverà il messaggio "Il dispositivo è pronto per l'uso!"
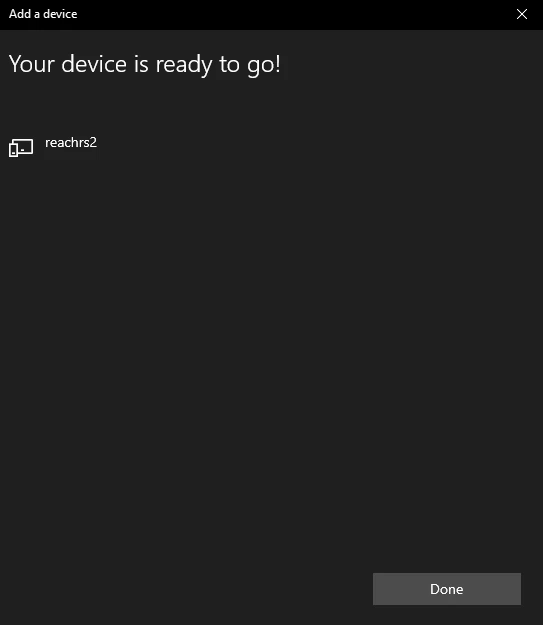
Ora è possibile procedere al passo successivo.
Configurazione dell'output della base
-
Nella schermata Receivers (Ricevitori) di Emlid Flow, toccare Base output (Output base).
-
Scegliere Bluetooth.
-
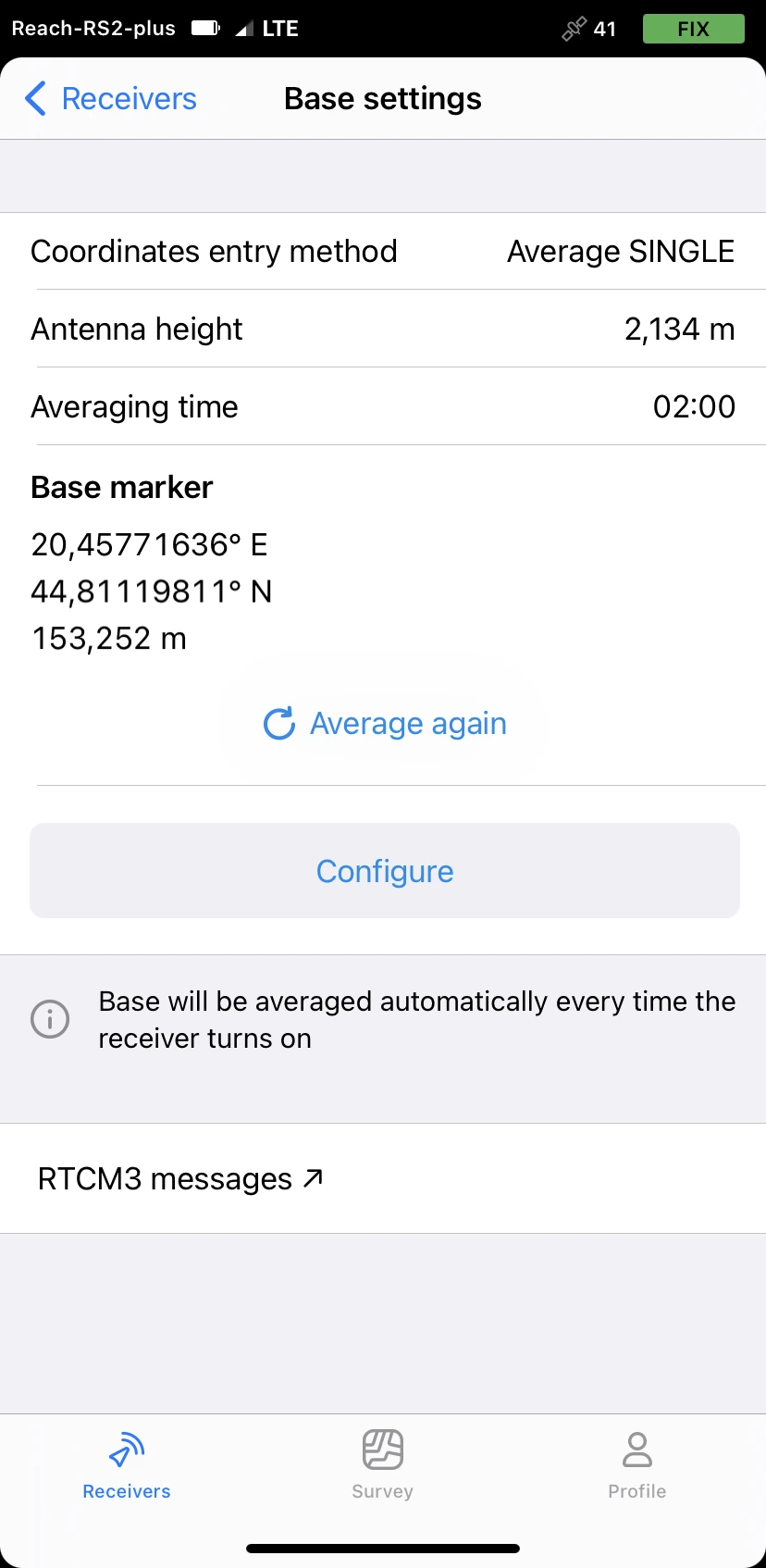
Tornare alla schermata Receivers (Ricevitori) e toccare Base settings (Impostazioni base).
-
Scegliere Coordinate entry method (Metodo di immissione delle coordinate). In questa guida, usiamo Average Single (Media Single).
suggerimentoPer saperne di più, consultare la guida Posizionamento della base.
-
Compilare Antenna height (Altezza antenna) e quindi specificare Averaging time (Tempo di calcolo della media).
-
Toccare RTCM3 messages (Messaggi RTCM3) e specificare i messaggi RTCM3 trasmessi.
Messaggi RTCM3 Tipo di messaggio Messaggi minimi richiesti 1006 Coordinata della stazione ARP 1074 GPS MSM4 **Messaggi opzionali per altri GNSS ** 1084 GLONASS MSM4 1094 Galileo MSM4 1124 BeiDou MSM4 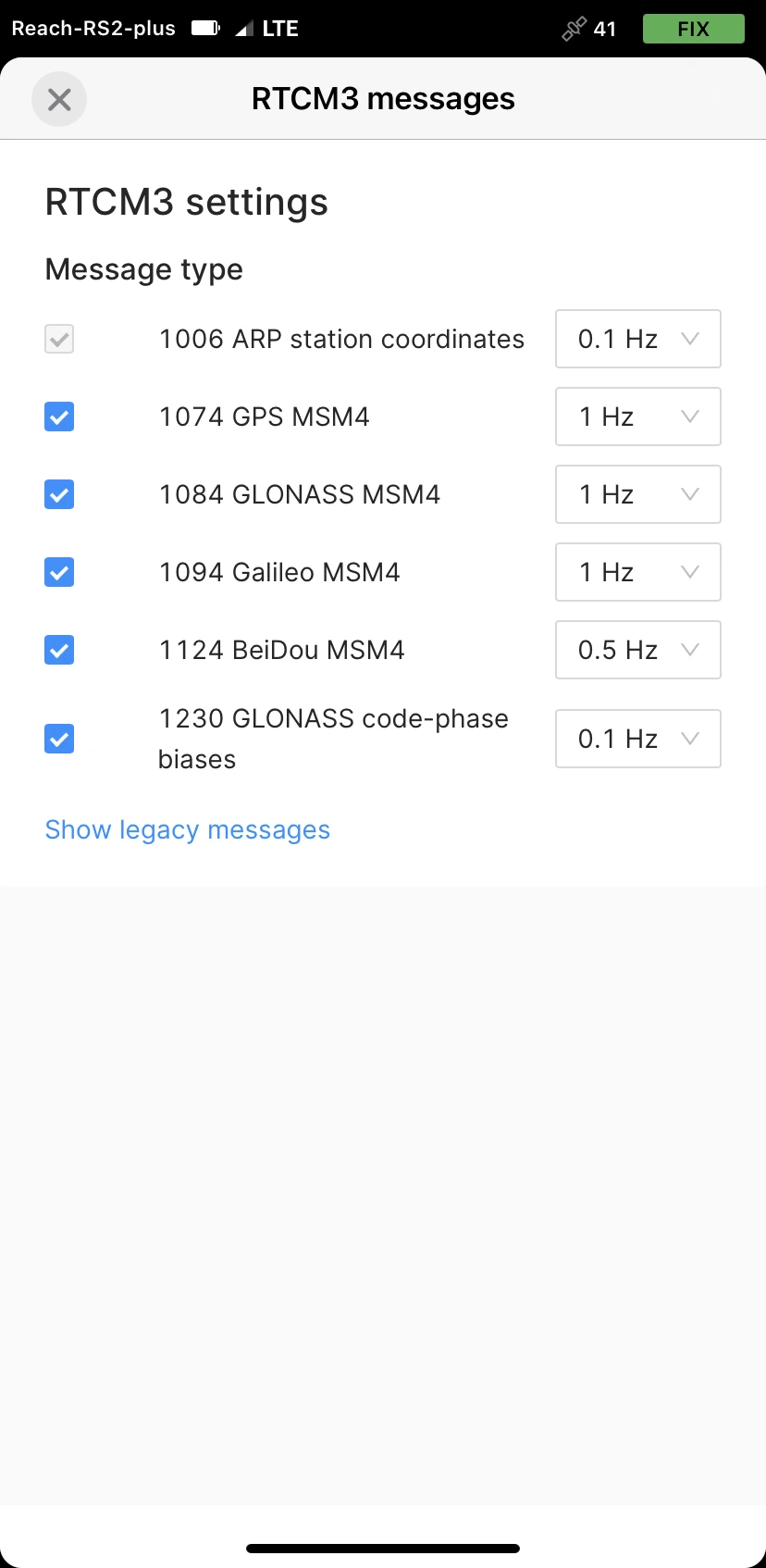
Verifica della connessione
Sarà necessario scoprire quale porta COM del PC è utilizzata da Reach RS2/RS2+. A tale scopo, si consiglia di utilizzare il client PuTTY per Windows.
-
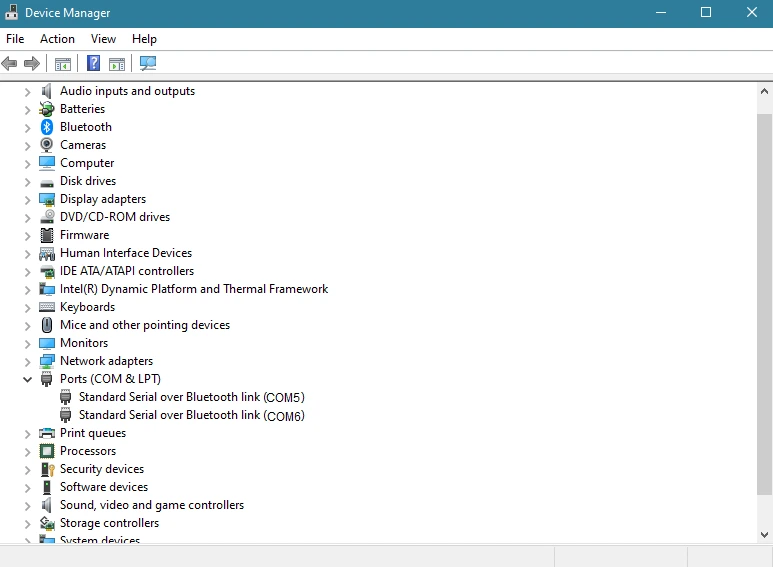
Aprire Gestione dispositivi sul computer.
-
Controllare le porte di collegamento standard seriale tramite Bluetooth disponibili.
-
Aprire PuTTY.
-
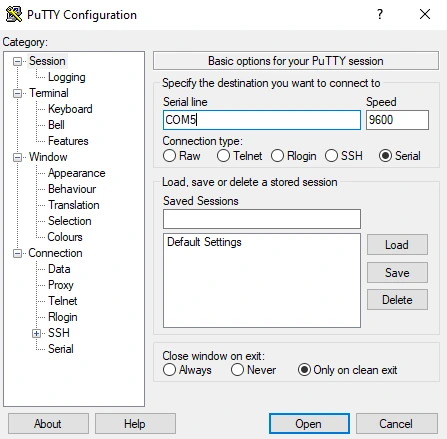
Andare alla scheda Session (Sessione).
-
Specificare la porta COM in Serial line (Linea seriale).
-
Scegliere la velocità 9600.
-
Scegliere il tipo di connessione Seriale.
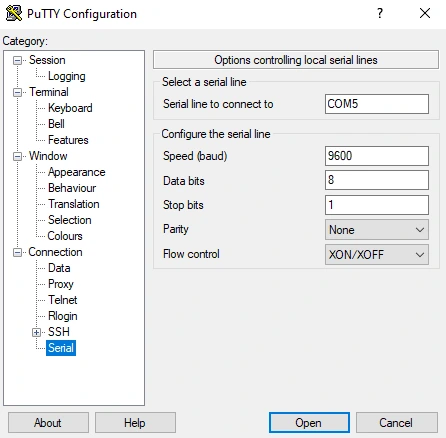
È possibile fare lo stesso nella scheda Serial (Seriale):
-
Andare alla scheda Serial (Seriale).
-
Specificare la porta COM in Serial line to connect to (Linea seriale a cui connettersi).
-
Scegliere la velocità 9600.
-
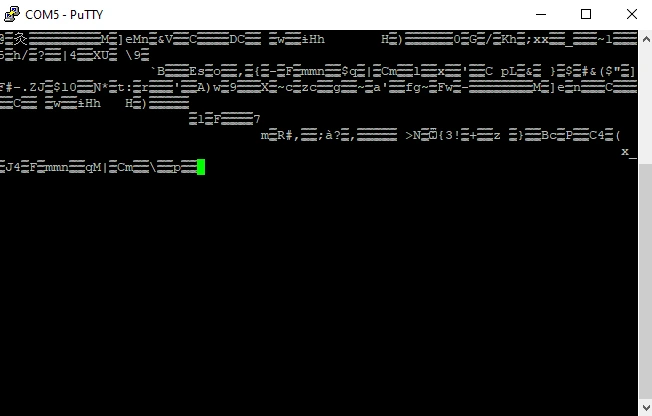
Premere Open (Apri)
Se è stata scelta la porta corretta, sullo schermo verranno visualizzate le correzioni da Reach RS2/RS2+ in formato RTCM3. Se non si vedono i dati in arrivo, scegliere un'altra porta COM in Serial line.
Ora si è pronti per configurare il collegamento RTK in eMotion3.
Connessione a eMotion3
Ora verrà mostrato come stabilire un collegamento RTK con la base Reach RS2/RS2+ sul drone eBee.
-
Avviare eMotion3.
-
Creare una missione e andare alla scheda Mission (Missione).
-
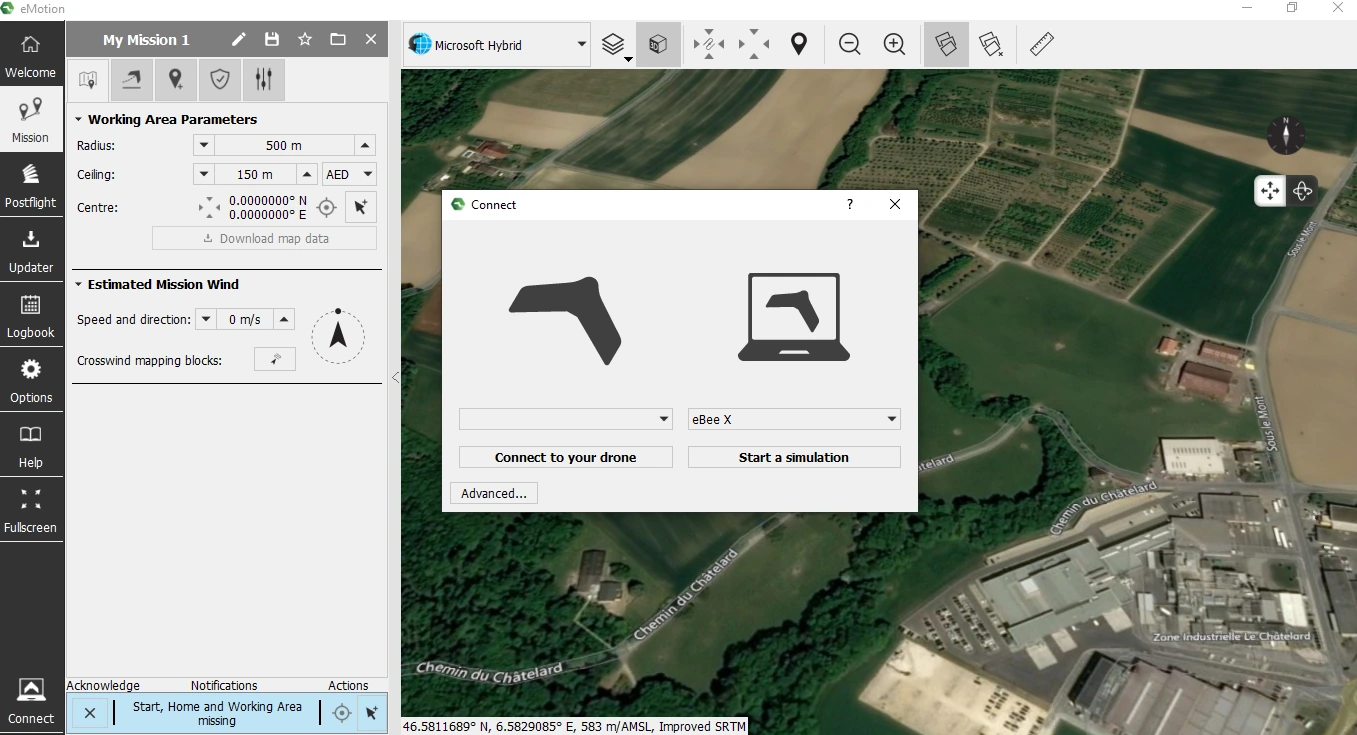
Premere il pulsante Connect (Connetti). Connettersi al drone premendo Connect to your drone (Collegamento al drone) o simulare il volo premendo Start a simulation (Avvia una simulazione).
-
Attivare la licenza RTK/PPK nella scheda eBee plus upgrade (Aggiornamento eBee plus) del pannello del drone. Per attivare una licenza per la simulazione, selezionare la casella Activate update for simulator (Attiva l'aggiornamento del simulatore).
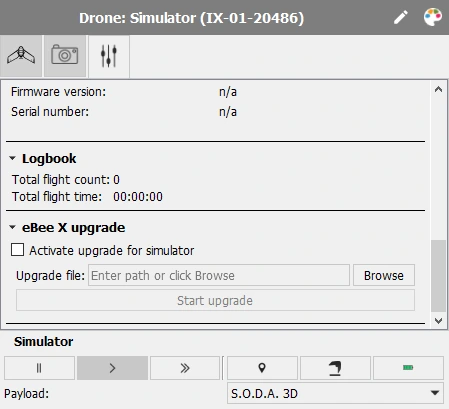
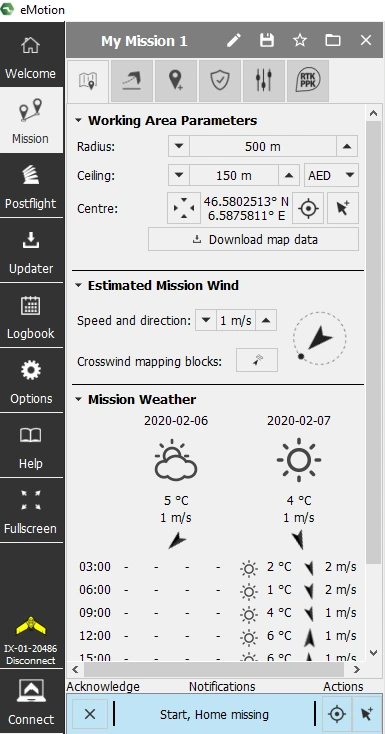
Ora è possibile vedere la scheda RTK abilitata nel pannello Mission (Missione) a sinistra.
-
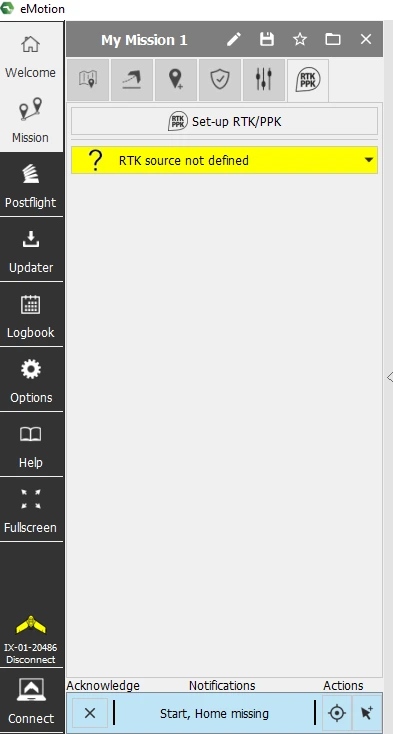
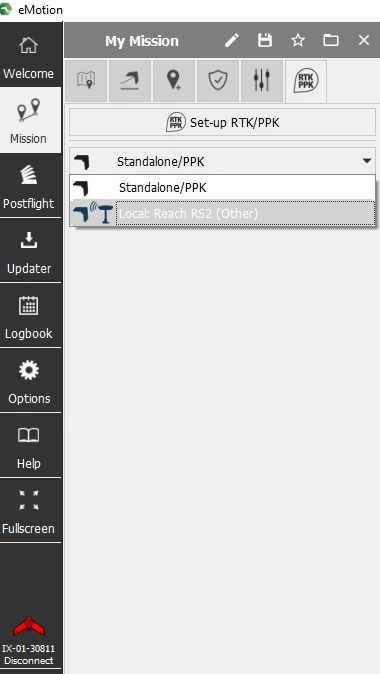
Andare alla scheda RTK nel pannello Mission (Missione).
-
Premere Set-up RTK/PPK (Configurazione RTK/PPK) per configurare la base.
-
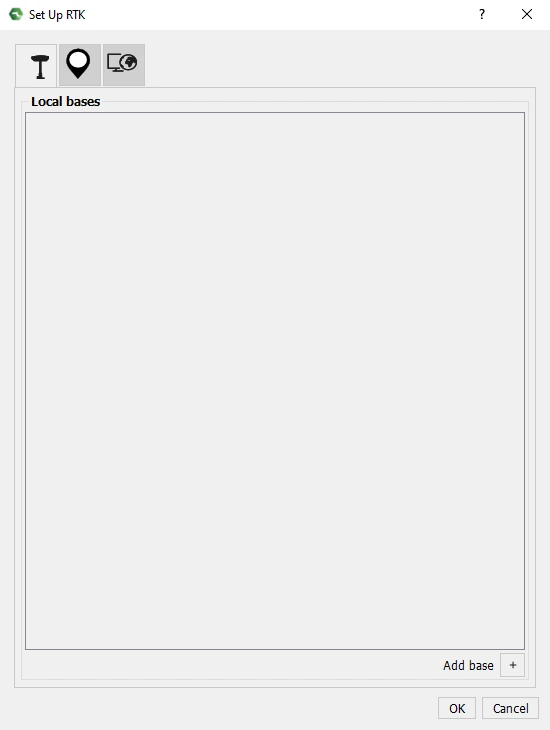
Nella finestra che si apre, è possibile specificare una stazione base, punti di riferimento o una VRS. Per configurare la stazione base, premere Add base + (Aggiungi base +) nella scheda Base.
-
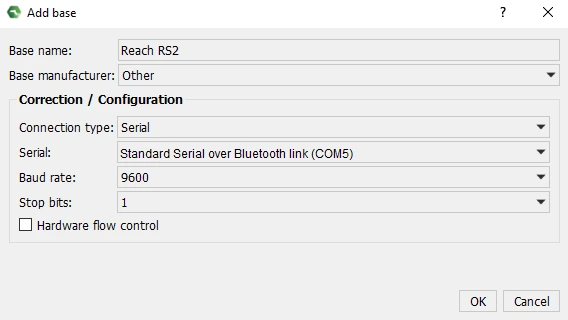
Impostare Reach RS2/RS2+ come Nome base.
-
Impostare Other (Altro) come Base manifacturer (Produttore della base).
-
Impostare Connection type (Tipo di connessione) su Serial (Seriale).
-
Scegliere la porta COM verificata nel passaggio precedente.
-
Impostare lo stesso baudrate per tutti i dispositivi connessi.
-
Premere OK.
- Una volta configurata la connessione, è possibile scegliere la stazione base nella scheda RTK.
-
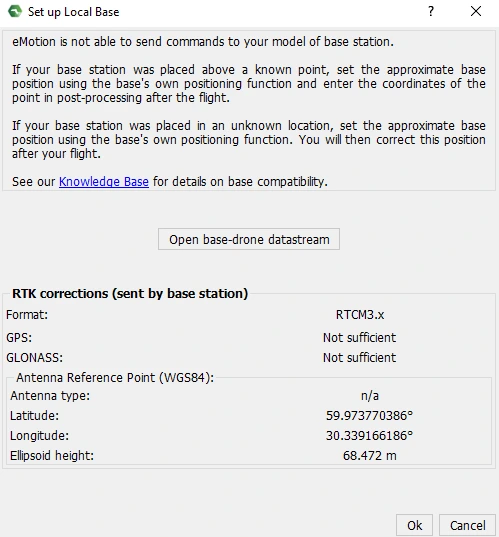
Premere sulla stazione base scelta per visualizzare la finestra Set up Local Base (Imposta base locale).
-
Premere Open base-drone datastream (Apri flusso di dati base-drone).
Se si sta testando la configurazione all'interno, i campi GPS e GLONASS mostreranno il messaggio Not sufficient (Non sufficiente).
- Verificare la posizione della base ricevuta dal drone.
- Andare al Pannello del drone. Nella scheda Instruments (Strumenti), è possibile vedere che il drone fornisce una precisione a livello centimetrico e che la modalità è RTK-fixed (RTK fisso).
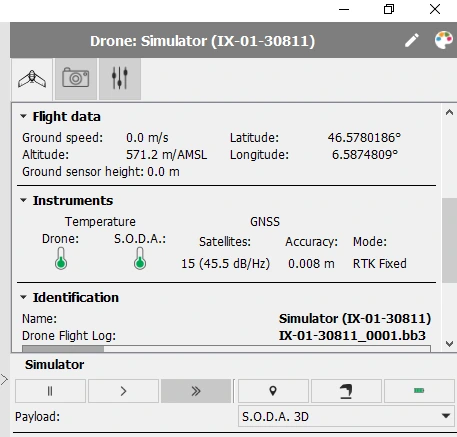
Le correzioni RTK da Reach RS2/RS2+ sono state configurate correttamente sul drone.