Glossario
Distanza griglia 2D
La distanza griglia 2D tra i punti A e B è la lunghezza della linea retta AB su un piano.
Distanza al suolo 2D
La distanza al suolo 2D tra i punti A e B è la lunghezza della linea AB più corta sulla superficie dell'ellissoide.
Perimetro 2D
Il perimetro 2D di un oggetto chiuso è la somma delle distanze 2D dei suoi lati senza considerare la differenza di altezza.
Posizionamento assoluto
Il posizionamento assoluto mostra le coordinate globali effettive relative alla superficie terrestre. Il posizionamento assoluto è fondamentale per i rilievi RTK in cui è necessaria un'accuratezza geografica assoluta (ad es. mappatura, rilievo dei confini della proprietà, ecc.). In questo caso, la posizione assoluta della base è fondamentale per ottenere risultati di alta accuratezza.
Accuratezza
L'accuratezza è la vicinanza delle misurazioni a un valore specifico. Nel rilievo, l'accuratezza si riferisce alla veridicità delle coordinate raccolte rispetto alle coordinate globali. Da non confondere con Precisione.
Età delle correzioni
L'età delle correzioni, o età differenziale (AOD - Age of differential), è una misura di quanto sono vecchie le correzioni inviate al ricevitore. Viene calcolata sottraendo l'ora di generazione del messaggio di correzione dall'ora corrente del ricevitore. L'età differenziale standard per RTK è normalmente di 1-2 secondi.
Centro di fase dell'antenna
Il centro di fase dell'antenna (APC) è il punto effettivo di un'antenna GNSS a cui viene riferita la ricezione del segnale satellitare. Non è un punto fisico fisso: la sua posizione si sposta con la direzione del segnale in ingresso e varia in base alla banda di frequenza. La posizione precisa del centro di fase dell'antenna è determinata attraverso le misurazioni di calibrazione del National Geodetic Survey, che sono essenziali per un posizionamento GNSS preciso.
Utilizzando il valore APC ottenuto, Emlid Flow compensa l'offset tra il punto di riferimento dell'antenna (ARP) sulla parte inferiore dei ricevitori Reach e l'APC, quindi è sufficiente inserire l'altezza del treppiede o della palina.
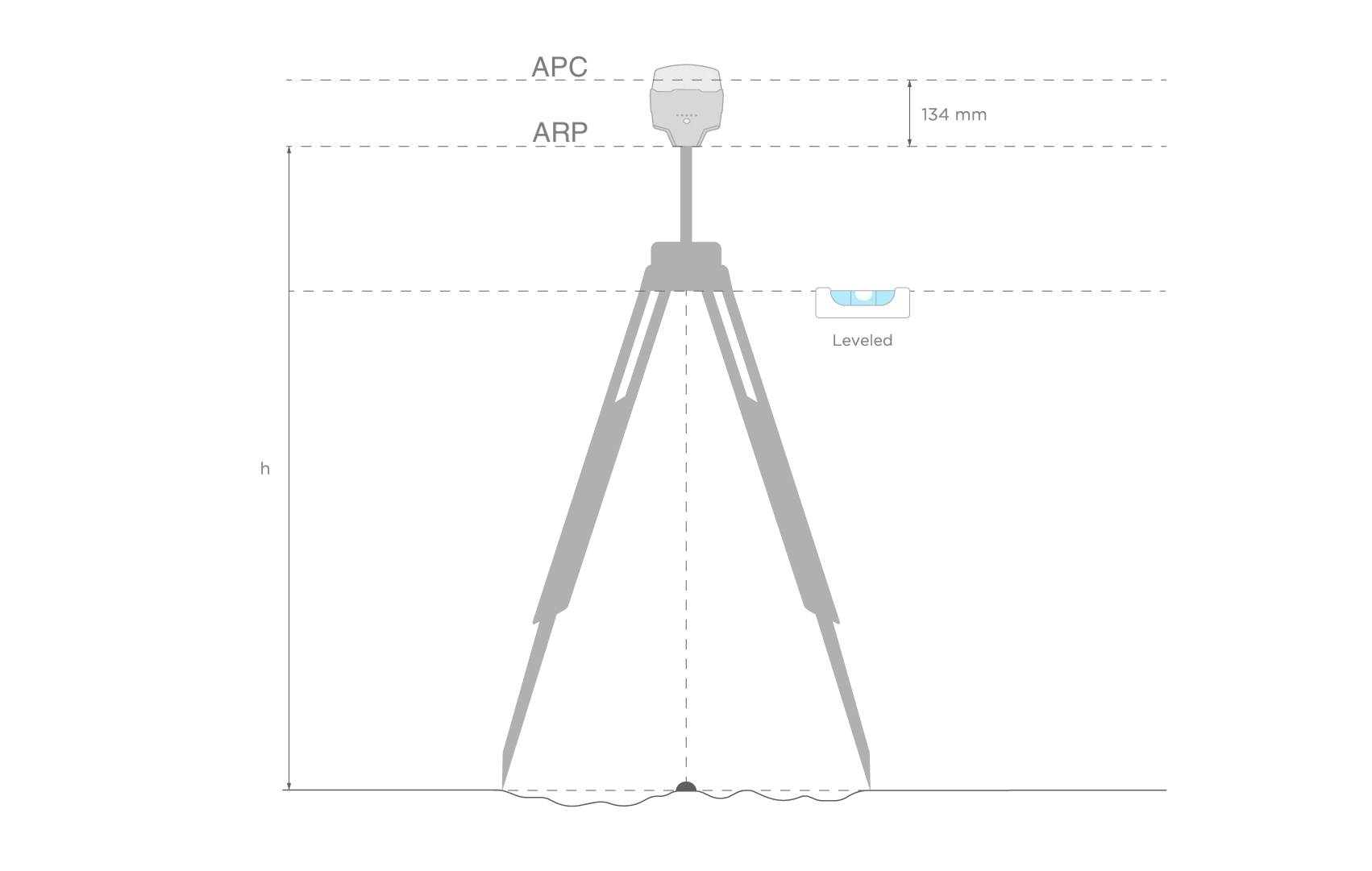
Punto di riferimento dell'antenna
Il punto di riferimento dell'antenna è il punto centrale nella parte inferiore del ricevitore. Viene utilizzato per il calcolo dell'altezza dell'antenna.
Area
L'area di un oggetto è la quantità totale di spazio racchiusa dalla sua forma su una superficie piana.
Rapporto AR
Questo è il risultato del test del rapporto eseguito sulla potenziale soluzione “Fix”, e mostra quante volte la soluzione migliore è migliore di quella successiva. Se questo numero è superiore a 3, Reach considererà la soluzione RTK Fissa.
Questo parametro corrisponde solo ai dispositivi Reach a banda singola (Reach RS/RS+, Reach Module/M+).
Base
La base è uno dei ricevitori che funge da stazione di riferimento negli scenari RTK o PPK. È un'unità statica con coordinate determinate che invia correzioni all'unità mobile o rover. Se la base è impostata su un punto noto, fornisce un'accuratezza assoluta.
Log delle correzioni della base
Questo log contiene le correzioni dalla stazione base in formato RTCM3.
Linea di base
La linea di base è la distanza tra un rover e una base. Se la linea di base è più grande di quella consigliata, la soluzione sarà meno accurata, il tempo di fix sarà più lungo o non verrà calcolato affatto.
Output base
L'output base è costituito dai dati inviati da una stazione base a un rover. Contiene correzioni che migliorano l'accuratezza delle informazioni di posizionamento. Nell'app Emlid Flow, nella schermata Output base, è possibile configurare la modalità di invio delle correzioni da parte della base nei seguenti modi: Seriale, TCP, NTRIP, Bluetooth o LoRa. I dispositivi Reach supportano l'output base in formato RTCM3.
BeiDou
BeiDou è un sistema di navigazione cinese. Nel 2000, BeiDou-1 copriva solo la Cina. Poi, nel 2012, BeiDou-2 ha iniziato a coprire la regione Asia-Pacifico. Dal 2015, BeiDou offre una copertura globale. Si consiglia di utilizzare questo sistema se ci si trova nella regione Asia-Pacifico.
Aggiornamenti beta
Gli aggiornamenti beta sono versioni software pre-rilascio utilizzate per test e feedback. Aiutano gli sviluppatori a trovare e risolvere problemi, a migliorare le funzionalità e a raccogliere i feedback degli utenti per migliorare la qualità del software prima del rilascio ufficiale.
Modalità client
La modalità client significa che Reach è connesso a una rete Wi-Fi esterna.
Continuo
Continuo è una strategia per la risoluzione delle ambiguità in RTK e PPK. In questo caso, le ambiguità vengono risolte epoca per epoca. Meno stabile di Fix-and-Hold, ma nessun rischio di mantenere un falso fix.
Sistema di coordinate
Il sistema di coordinate è un sistema locale, regionale o globale basato su coordinate, utilizzato per localizzare entità geografiche. Un sistema di riferimento spaziale definisce una proiezione cartografica specifica, così come le trasformazioni tra diversi sistemi di riferimento spaziali.
Correzione in ingresso
Questa è la parte delle impostazioni del rover responsabile della configurazione dell'accettazione delle correzioni. Utilizzando la configurazione dell'input di correzione nell'app Emlid Flow, è possibile scegliere il modo in cui il rover riceve le correzioni: tramite Seriale, TCP, NTRIP, Bluetooth o LoRa. I ricevitori Reach supportano l'input di correzione in formato RTCM3.
Correzioni
Le correzioni sono i dati utilizzati per eliminare i ritardi ionosferici e troposferici e gli errori degli orologi dei satelliti. La base statica trasmette le correzioni al rover in movimento nello scenario RTK.
CORS
Le stazioni di riferimento operative in continuo o la rete CORS è la rete di stazioni statiche che fornisce dati GNSS esatti (fase della portante, intervallo di codici, ecc.) e anche correzioni. I topografi possono accedere a queste informazioni per aumentare l'accuratezza dei loro dati di rilievo post-elaborati o per lavorare in RTK in loco.
Delta E/N
Il Delta E/N tra i punti A e B è la differenza delle loro coordinate lungo i corrispondenti assi Est e Nord.
Diluizione della precisione o DOP
La diluizione della precisione o DOP (Dilution of Precision) è il termine usato per valutare la posizione geometrica dei satelliti rispetto al ricevitore. Quando i satelliti sono troppo vicini tra loro nel campo visivo, significa che la geometria dei satelliti è debole (un valore DOP alto). Se la distanza tra i satelliti è sufficiente e sono distribuiti uniformemente e coprono più spazio, la geometria è considerata forte, quindi il valore DOP è basso. Più basso è il DOP, più accurati sono i dati. Un buon valore DOP è considerato inferiore a 2.
Direzione (azimut)
La direzione (azimut) di una linea AB, o dal punto A al punto B, è un angolo orizzontale in gradi, misurato al punto A in senso orario tra la direzione del nord e la direzione del punto B.
Indirizzo IP dinamico
Un indirizzo IP dinamico è un indirizzo IP (Internet Protocol) assegnato automaticamente al dispositivo Reach da un server DHCP (Dynamic Host Configuration Protocol) ogni volta che il dispositivo Reach si connette alla rete o si riavvia. Questi indirizzi sono temporanei e possono cambiare nel tempo, a differenza degli indirizzi IP statici, che rimangono invariati.
Maschera di elevazione
La maschera di elevazione può essere configurata nelle impostazioni RTK dell'app Emlid Flow. I satelliti al di sotto dell'elevazione impostata verranno esclusi dal calcolo. L'impostazione predefinita è di 15 gradi. Solitamente, i satelliti con un'elevazione più bassa forniscono misurazioni troppo rumorose, poiché il segnale attraversa la maggior parte dell'atmosfera.
Emlid Flow
Emlid Flow è l'app mobile creata da Emlid. Viene utilizzata per controllare e configurare i ricevitori Reach, creare progetti, rilevare punti, ecc.
ENU
Uno dei formati per la trasmissione della posizione disponibile per i dispositivi Reach. Semplice protocollo di testo per le componenti Est, Nord e Su della linea di base e per lo stato della soluzione.
ERB
Uno dei formati per la trasmissione della posizione disponibile per i dispositivi Reach. Utilizzato per la comunicazione con ArduPilot. ERB è l'acronimo di Emlid Reach Binary protocol.
Connettore inferiore esterno
Il connettore inferiore esterno è un connettore a 9 pin situato nella parte inferiore di Reach RS/RS+, RS2/RS2+ e RS3. Viene utilizzato per fornire alimentazione costante da una batteria esterna, per stabilire la comunicazione RTK con dispositivi di terze parti e per trasmettere la posizione di Reach ad altri dispositivi o app di terze parti. Utilizza il protocollo di comunicazione seriale RS-232.
Fix-and-Hold
Fix-and-Hold è una strategia per la risoluzione delle ambiguità in RTK e PPK. Dopo la prima risoluzione dell'ambiguità, le mantiene vincolate. Il fix è più stabile ma, nel caso in cui la prima inizializzazione non sia stata corretta, ci vorrà più tempo per ripristinare e inizializzare correttamente. Immagina il Fix come se avesse un'inerzia.
Report di sistema completo
Un rapporto di sistema completo è uno strumento utilizzato per facilitare le segnalazioni di problemi. Viene fornito in un archivio ZIP e contiene i log di sistema e i dettagli tecnici del dispositivo, nonché alcune informazioni sensibili come le credenziali NTRIP o le password di rete. Per questo motivo, si sconsiglia di condividere pubblicamente il rapporto. Questi vengono utilizzati per il debug di casi complicati nell'assistenza.
Galileo
Galileo è un sistema di navigazione satellitare europeo. Ha iniziato a funzionare nel 2011 e ora ha una copertura globale.
Datum globale
Il datum globale è un sistema di riferimento di coordinate ellissoidali utilizzato dal ricevitore per misurare le coordinate prima dell'applicazione di qualsiasi trasformazione.
Pendenza
La pendenza di una linea è la misura della sua ripidità, con valori maggiori che indicano pendenze più ripide e lo 0% che indica una linea orizzontale.
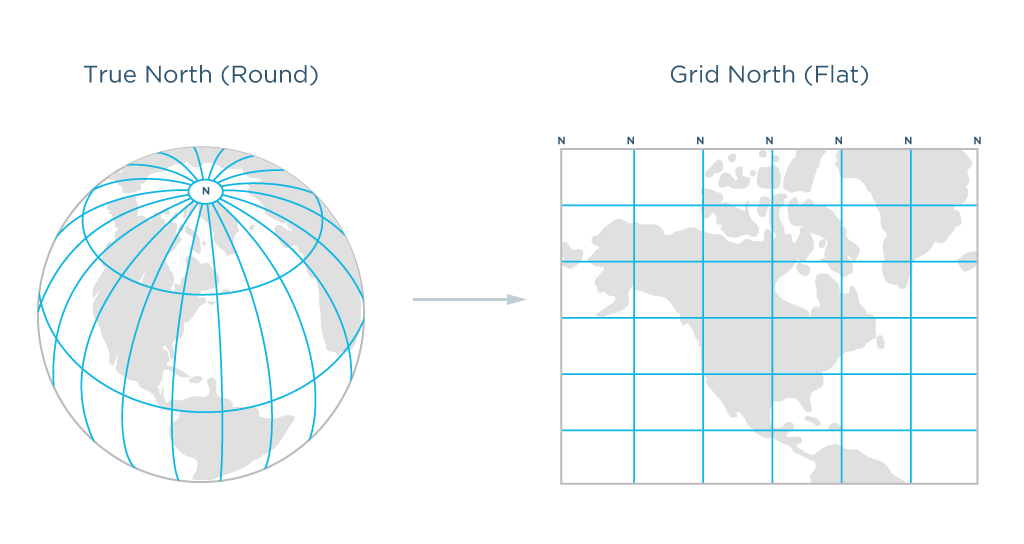
Azimut Nord griglia
L'azimut Nord griglia è l'angolo misurato in senso orario tra una linea parallela al meridiano centrale e la direzione di un punto di interesse (una linea retta tra due punti sul piano di proiezione piatto).
Distanza dalla griglia
La distanza griglia è la distanza misurata sul piano di proiezione piatto.
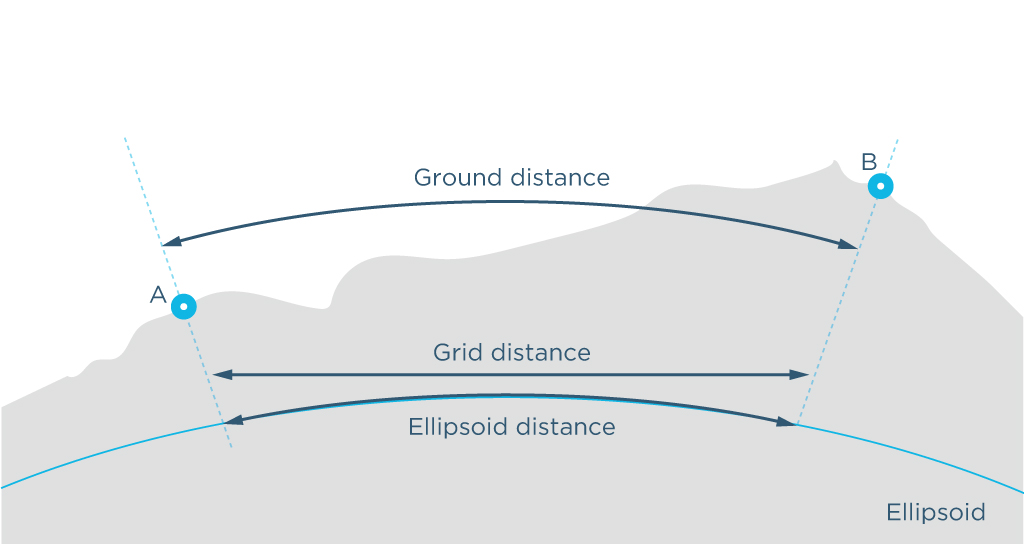
Distanza dal suolo
La distanza al suolo è la distanza misurata sulla superficie effettiva della Terra, tenendo conto dell'elevazione media dei punti misurati.
Punto di controllo a terra o GCP
Un punto di controllo a terra è un punto su una superficie con coordinate note. I GCP sono utilizzati attivamente nella mappatura aerea e nella fotogrammetria. I topografi impostano i GCP sull'area e li contrassegnano in modo che siano visibili dal drone. I GCP vengono quindi rilevati per trovare le loro coordinate esatte e utilizzati come punti di riferimento per la futura elaborazione dei dati.
GIS
Il Sistema Informativo Geografico o GIS è un sistema per la raccolta, l'archiviazione, l'analisi e la visualizzazione grafica di dati spaziali e informazioni correlate sugli oggetti richiesti.
GLONASS
GLONASS è un sistema di navigazione satellitare globale. È stato creato come alternativa al GPS nell'Unione Sovietica e lanciato per la prima volta nel 1982.
Modalità AR GLONASS
Un parametro di elaborazione che consente di attivare e disattivare separatamente la risoluzione dell'ambiguità per il segnale GLONASS. A differenza del GPS, tutti i satelliti GLONASS trasmettono su frequenze diverse, il che si traduce in deviazioni intercanale (ICB) che sono uniche per ogni modello di ricevitore.
I dispositivi Reach possono correggere gli ICB GLONASS, consentendo l'AR GLONASS con basi non Reach come i caster NTRIP. La raccomandazione generale è di avere sempre l'AR GLONASS impostato su on.
Questo parametro corrisponde solo ai dispositivi Reach a banda singola (Reach RS/RS+, Reach Module/M+).
GNSS
Il Global Navigation Satellite System o GNSS è un sistema progettato per determinare la posizione (coordinate geografiche) di oggetti terrestri, acquatici e aerei. Tali sistemi sono costituiti da apparecchiature spaziali, un segmento di terra chiamato sistemi di controllo e ricevitori individuali. Il funzionamento del GNSS si basa sulla misurazione della distanza dall'antenna sull'oggetto (ricevitore) ai satelliti la cui posizione è nota con grande accuratezza.
GPS
Il Global Positioning System o GPS è un sistema di navigazione satellitare globale che misura distanza, tempo e posizione nel sistema di coordinate mondiali WGS 84. Il sistema è stato sviluppato nel 1978 ed è gestito dagli Stati Uniti.
Piano di massa
Un piano di massa è una piastra conduttiva che fornisce isolamento per l'antenna. Può essere un pezzo di metallo, il tetto di un'auto, un tetto metallico di un edificio, ecc. Si consiglia di utilizzare un piano di massa di almeno 70x70 mm.
Adattatore per slitta a contatto
La slitta a contatto è un punto sulla parte superiore di una fotocamera che viene utilizzato per collegare accessori o altre apparecchiature alla fotocamera. Utilizzando l'adattatore per slitta a contatto, è possibile collegare la fotocamera a Reach M2/M+ per la mappatura con UAV.
Modalità hotspot
La modalità hotspot significa che Reach sta trasmettendo la propria rete Wi-Fi.
Posizionamento cinematico��
Il posizionamento cinematico è una delle due modalità di posizionamento. Implica che il rover si muove durante il processo di posizionamento.
LLH
Uno dei formati per la trasmissione della posizione disponibile per i dispositivi Reach. Semplice protocollo di testo per Latitudine, Longitudine e Altezza, nonché per lo stato della soluzione.
Localizzazione
La localizzazione nel rilievo GNSS è una funzione per calcolare i parametri del sistema di coordinate locale o per regolare quello esistente in modo da adattarlo ai punti di controllo nell'area di rilievo.
Radio LoRa
La radio a lungo raggio o LoRa viene utilizzata per i ricevitori Reach per inviare o ricevere correzioni senza una connessione Internet. Reach RS3/RS2/RS2+/RS+ è dotato di radio LoRa interna. Reach M2/M+ ha una radio LoRa esterna disponibile: è possibile collegarla tramite la porta S2. La radio è unidirezionale: o invia la correzione o la riceve. Utilizzando la modulazione LoRa è possibile raggiungere fino a 19 km (11,8 mi) in linea di vista.
Posizione fittizia
La funzione di Posizione fittizia dei dispositivi Android consente di modificare manualmente la posizione del dispositivo in qualsiasi altro luogo. Nel caso dei dispositivi Reach, consente alle app di raccolta GPS di ottenere le osservazioni GPS direttamente dal ricevitore invece che dal GPS interno dell'unità.
Punto di montaggio
Il punto di montaggio è una fonte di dati di correzione relativa alla specifica stazione di riferimento fisica o virtuale scelta o creata in base alla rispettiva posizione. Quando si ricevono correzioni da una VRS, è necessario abilitare l'invio della posizione del ricevitore in formato NMEA.
Ricevitore multibanda
Un ricevitore multibanda è un ricevitore in grado di accettare segnali dal satellite su più di una banda di frequenza. Ciò significa che il ricevitore impiega meno tempo a stabilire la prima soluzione di fix, ha una linea di base più lunga e ha maggiori possibilità di mantenere la soluzione di fix in condizioni di cielo ostruito.
Percorso multiplo
Il percorso multiplo è un effetto che si verifica quando il segnale GPS viene deviato dagli ostacoli, per cui il ricevitore GNSS rileva i segnali non solo direttamente dai satelliti, ma anche dagli oggetti locali. L'effetto del percorso multiplo provoca un errore nelle misurazioni di pseudo-distanza e quindi influisce sull'accuratezza posizionale.
Modalità notturna
La modalità notturna consente di spegnere i LED fino al successivo riavvio del dispositivo Reach.
NMEA 0183
Uno dei formati per la trasmissione della posizione disponibile per i dispositivi Reach. Lo standard più diffuso nel settore. Messaggi supportati: GNRMC, GNGGA, GNVTG, GNGST, GNZDA, GNEBP, GPRMC, GPGSA, GPGGA, GPGSV, GPVTG, GPGST, GPZDA, GPEBP, GLGSA, GLGSV, GAGSA, GAGSV, GBGSA, GBGSV.
NTRIP
La rete NTRIP (Networked Transport of RTCM via Internet Protocol) è una fonte alternativa di correzioni. NTRIP permette al rover di accettare correzioni via Internet senza la necessità di un secondo ricevitore locale che funga da base. Una stazione di riferimento raccoglie i dati, quindi li invia al caster NTRIP, dove vengono ritrasmessi attraverso la porta Internet al rover client collegato tramite una porta particolare e autorizzato.
Nuvola di punti
Una nuvola di punti è un insieme di vertici in un sistema di coordinate tridimensionale. Le nuvole di punti vengono create con scanner 3D e sono utilizzate in fotogrammetria e modellazione 3D.
Raccolta punti
La raccolta punti è una funzione dell'app Emlid Flow che consente di trovare le coordinate esatte del punto. Il ricevitore determina le coordinate (x, y, z) di un punto a terra e le registra nel progetto per un'ulteriore elaborazione.
Picchettamento punti
Il picchettamento punti è una funzione dell'app Emlid Flow che consente di trovare punti con coordinate note in cantiere.
Altezza palina
Durante la preparazione della raccolta punti, configurare l'altezza della palina topografica in Emlid Flow. Aiuterà l'app a calcolare automaticamente l'altezza dell'antenna.
Registro di posizione
Questo log contiene informazioni sulla posizione. I dispositivi Reach possono registrare la loro posizione nei formati LLH, XYZ, ENU, NMEA e ERB.
Trasmissione della posizione
I dispositivi Reach possono inviare i dati di posizione ad app GIS di terze parti e a dispositivi esterni, tra cui trattori, droni, robot e altro. La posizione può essere condivisa tramite Seriale, TCP e Bluetooth. Varie applicazioni richiedono formati diversi per i dati di posizione, per questo motivo Reach restituisce la sua posizione in LLH, XYZ, ENU, NMEA e ERB.
PPK
La cinematica post-elaborata è una delle tecniche utilizzate per i rilievi ad alta precisione. Come in RTK, sono necessarie due unità: una base e un rover. La differenza fondamentale è che nello scenario PPK non è necessaria una connessione in tempo reale tra le due unità. Base e rover registrano i log separatamente e questi log vengono elaborati insieme in un secondo momento utilizzando un software di post-elaborazione specifico, ad esempio RTKLib.
PPP
Il Precise Point Positioning o PPP è una tecnica utilizzata per determinare le coordinate di un punto con un'accuratezza a livello centimetrico. Il ricevitore posizionato su un punto registra i dati per un certo periodo. Quindi questi dati vengono inviati ai servizi PPP.
Precisione
La precisione è la vicinanza di due o più misurazioni l'una all'altra. La precisione significa che le coordinate raccolte sono veritiere rispetto a un altro oggetto. In questo caso, non sono necessarie le coordinate esatte di georeferenziazione dei punti, ma è sufficiente sapere che i punti raccolti si trovano, ad esempio, alla stessa distanza l'uno dall'altro. Da non confondere con l'Accuratezza.
QZSS
QZSS sta per Quasi-Zenith Satellite System, il sistema satellitare giapponese. Serve principalmente la regione Asia-Pacifico, con un'attenzione particolare alle esigenze del Giappone di informazioni di posizionamento precise e affidabili. Il primo satellite è stato lanciato l'11 settembre 2010 ed è diventato operativo nel 2018.
Log dei dati grezzi
Un log di dati grezzi contiene le osservazioni GNSS del ricevitore senza il calcolo di coordinate accurate. Può essere registrato in formato UBX o direttamente nel formato standard del settore RINEX.
Reach Panel
Reach Panel è uno strumento che consente di accedere a Reach in un browser, monitorarne lo stato e ottenere opzioni aggiuntive come il download di un gran numero di log e la configurazione dell'output dei messaggi NMEA su Reach per integrarlo con vecchie macchine agricole.
Posizionamento relativo
Il posizionamento relativo mostra le coordinate relative a un altro oggetto di riferimento. La base invia al rover informazioni sulla sua posizione assoluta. Utilizzando queste informazioni, il rover determina la sua posizione rispetto alla base con un'accuratezza centimetrica.
RINEX
RINEX è un formato di dati grezzi standard che consente di memorizzare le osservazioni satellitari e le misurazioni dei dati di navigazione effettuate dal ricevitore. Consente inoltre la post-elaborazione dei dati ricevuti da varie applicazioni di diversi produttori di ricevitori e programmi.
RMS
La radice quadrata della media dell'errore quadratico. I calcoli RMS vengono utilizzati per valutare l'accuratezza della misurazione della posizione.
Rover
Il rover è uno dei due ricevitori GNSS utilizzati per la raccolta dei dati negli scenari RTK o PPK. Il rover è un'unità mobile: il topografo utilizza il rover per registrare i punti, mentre il rover riceve le correzioni dalla base statica.
RTCM3
RTCM3 è un formato standard del settore per l'output delle correzioni.
RTK
La cinematica in tempo reale o RTK è una delle tecniche utilizzate per migliorare l'accuratezza dei dati raccolti dai satelliti tramite il ricevitore. Per l'RTK sono necessari due ricevitori: una base e un rover. La base invia correzioni al rover in movimento durante la raccolta dei dati.
RTKCONV
RTKCONV è uno strumento di RTKLIB che converte i dati grezzi UBX o i dati di correzione della base RTCM3 da un ricevitore al formato RINEX.
RTKLIB
RTKLIB è un pacchetto di programmi open-source per il posizionamento standard e preciso con GNSS. Viene utilizzato per l'elaborazione dei dati PPK. Funziona con segnali GPS, GLONASS, Galileo, QZSS, BeiDou e SBAS. Emlid produce la versione di RTKLib su misura per i prodotti Reach.
RTKPLOT
RTKPLOT è uno strumento di RTKLIB che consente di visualizzare e tracciare le soluzioni di posizione da RTKPOST e i dati di osservazione da RTKCONV.
RTKPOST
RTKPOST è uno strumento per la post-elaborazione dei log grezzi in RTKLIB. Il risultato viene memorizzato nel file della soluzione di posizione in LLH in coordinate geografiche - file POS. In questo file, si otterrà la traccia del ricevitore con un'accuratezza centimetrica.
Porta seriale (UART, USB, RS-232)
Un'interfaccia di comunicazione seriale in cui le informazioni vengono trasferite in entrata o in uscita in modo sequenziale, un bit alla volta. Questo tipo di comunicazione può essere realizzato tramite vari dispositivi come UART, USB o RS-232. I ricevitori Reach possono utilizzare una porta seriale per scambiare i dati di posizione e di correzione con dispositivi di terze parti.
Rapporto segnale/rumore
Il rapporto segnale/rumore o SNR è l'indicatore principale della qualità della ricezione. Il valore è pari al rapporto tra la potenza del segnale utile e la potenza del rumore. L'indicatore SNR si trova nella schermata principale dell'app Emlid Flow. Quando l'SNR di un satellite supera i 45, viene contrassegnato in verde. Le barre grigie indicano l'SNR della stazione base. Più satelliti si trovano in una zona verde, più precise sono le misurazioni e più rapida è la risoluzione dell'ambiguità.
Report di sistema semplice
Un rapporto di sistema semplice è uno strumento utilizzato per facilitare le segnalazioni di problemi. Fornisce informazioni sulla versione di Emlid Flow, sulle configurazioni e sulla rete in formato testo semplice.
Ricevitore monobanda
Un ricevitore monobanda è un dispositivo che accetta segnali dal satellite su una sola banda di frequenza. Ha lo stesso livello di accuratezza di quello multibanda. Il ricevitore a banda singola ha una linea di base più corta rispetto a quello multibanda e potrebbe non trovare una soluzione di fix in condizioni di cielo ostruito.
Distanza inclinata
La distanza inclinata dal punto A al punto B è la lunghezza della linea retta AB, misurata lungo la pendenza, tenendo conto della differenza di altezza tra i punti.
Perimetro inclinato
Il perimetro inclinato di un oggetto chiuso è la somma delle distanze inclinate dei suoi lati, considerando la differenza di altezza.
Maschera SNR
La maschera del rapporto segnale/rumore o maschera SNR è uno strumento che filtra i satelliti utilizzati per la soluzione di fix. I satelliti con SNR basso verranno esclusi dal calcolo. L'impostazione predefinita nell'app Emlid Flow è 35.
Stato della soluzione (fix, float, single)
Lo stato della soluzione definisce la precisione che può essere raggiunta al momento. Ci sono tre stati di soluzione che si possono vedere quando si lavora con i dispositivi Reach.
SINGLE significa che il rover ha trovato una soluzione basandosi sul proprio ricevitore e le correzioni della base non vengono applicate. La precisione in modalità autonoma è solitamente a livello di alcuni metri.
FLOAT significa che il rover riceve le correzioni dalla base ma non è in grado di risolvere tutte le ambiguità; in questo caso, la precisione è solitamente a livello submetrico.
FIX significa che il rover, utilizzando le correzioni della base, ha risolto le ambiguità nel calcolo della sua posizione e ha raggiunto la soluzione con una precisione a livello centimetrico.
Indirizzo IP statico
Un indirizzo IP statico è un indirizzo IP (Internet Protocol) fisso e immutabile, configurato manualmente per il dispositivo Reach. Non cambia nel tempo, a differenza di un indirizzo IP dinamico, che può essere assegnato da un server DHCP (Dynamic Host Configuration Protocol) e può cambiare ogni volta che Reach si connette alla rete o si riavvia. È possibile assegnare a Reach un indirizzo IP statico quando lo si connette a una nuova rete Wi-Fi nell'app Emlid Flow o in Reach Panel.
Posizionamento statico
Il posizionamento statico è una delle modalità di posizionamento. Presuppone che il rover Reach sia statico. Vincolare il sistema aiuta a risolvere le ambiguità più velocemente e a produrre misurazioni con una precisione maggiore.
TCP
Il Transmission Control Protocol o TCP è uno dei principali protocolli di trasferimento dati di Internet, progettato per controllare il trasferimento dei dati. Lo scenario tipico per l'utilizzo di TCP è l'invio di dati di correzione a un'applicazione sulla stessa rete o a un server con IP pubblico.
Marcatura temporale
La funzione di marcatura temporale verifica il momento esatto in cui la fotocamera scatta una foto. Dopo il volo, è possibile elaborare i log grezzi della base e di un rover per ottenere un file «*_events.pos». Questo file include informazioni sull'ora e le coordinate di ogni foto. È possibile utilizzare un software di geotagging per scrivere queste informazioni nei dati EXIF delle foto.
Azimut Nord effettivo
L'Azimut Nord effettivo è l'angolo compreso tra 0 e 360 gradi misurato in senso orario tra il Nord effettivo e la direzione di un punto di interesse.
UBX
UBX è il formato dei dati grezzi GNSS. Il protocollo UBX è un protocollo binario proprietario di u-blox che viene restituito in formato esadecimale.
Frequenza di aggiornamento
La frequenza di aggiornamento è un valore che mostra la frequenza con cui il ricevitore calcola e riporta la sua posizione. Per i ricevitori Reach, si consiglia di avere una frequenza di aggiornamento di 1 Hz sulla base e di 5 Hz sul rover.
VRS
La stazione di riferimento virtuale o VRS (Virtual Reference Station) è uno strumento utile per le linee di base lunghe. È una stazione di riferimento immaginaria e non occupata, generata nelle vicinanze dell'utente RTK. Il rover invia i dati al caster NTRIP. NTRIP consente di unire i dati del rover e i dati delle basi NTRIP dense e modella una base virtuale accanto all'utente.
WGS 84
Il World Geodetic System 1984 o WGS 84 è il sistema globale dei parametri geodetici della Terra, compreso il sistema di coordinate geocentriche. È stato accettato nel 1984 e definisce le coordinate rispetto al centro di massa della Terra, con un errore inferiore a 2 cm.
XYZ
Uno dei formati per la trasmissione della posizione disponibile per i dispositivi Reach. Semplice protocollo di testo per le coordinate X, Y, Z ECEF e per lo stato della soluzione.