Glossaire
Distance de la grille 2D
La distance de la grille 2D entre les points A et B est la longueur de la ligne droite AB sur un plan plat.
Distance au sol 2D
La distance au sol 2D entre les points A et B est la longueur de la ligne AB la plus courte sur la surface de l'ellipsoïde.
Périmètre 2D
Le périmètre 2D d'un objet contenu est la somme des distances 2D de ses côtés sans considération de la différence de hauteur.
Positionnement absolu
Le positionnement absolu montre vos coordonnées globales réelles par rapport à la surface de la Terre. Le positionnement absolu est essentiel pour les levés RTK où vous avez besoin d'une précision géographique absolue (par exemple, cartographie, levé des frontières de la propriété, etc). Dans ce cas, votre position absolue de base est cruciale pour obtenir des résultats de haute précision.
Exactitude
L'exactitude est la proximité des mesures par rapport à une valeur spécifique. En géomatique, l'exactitude fait référence à la véracité des coordonnées que vous avez collectées par rapport aux coordonnées globales. À ne pas confondre avec la Précision.
Âge des corrections
L'âge des corrections, ou âge différentiel (AOD), est une mesure de l'ancienneté des corrections envoyées au récepteur. Il est calculé en soustrayant le moment où le message de correction a été généré de l'heure actuelle du récepteur. L'âge différentiel standard pour le RTK est normalement de 1-2 secondes.
Centre de phase de l'antenne
Le centre de phase de l'antenne peut être considéré comme la source de rayonnement de l'antenne. Toutes les mesures GNSS sont référées au centre de phase. Le centre de phase ne correspond pas au centre physique de l'antenne et sa position réelle dépend de la direction du signal radio entrant.
En utilisant la valeur APC obtenue, Emlid Flow compense le décalage entre le point de référence de l'antenne (ARP) au bas des récepteurs Reach et l'APC, vous n'avez donc besoin d'entrer que la hauteur du trépied ou de la perche d'arpentage.
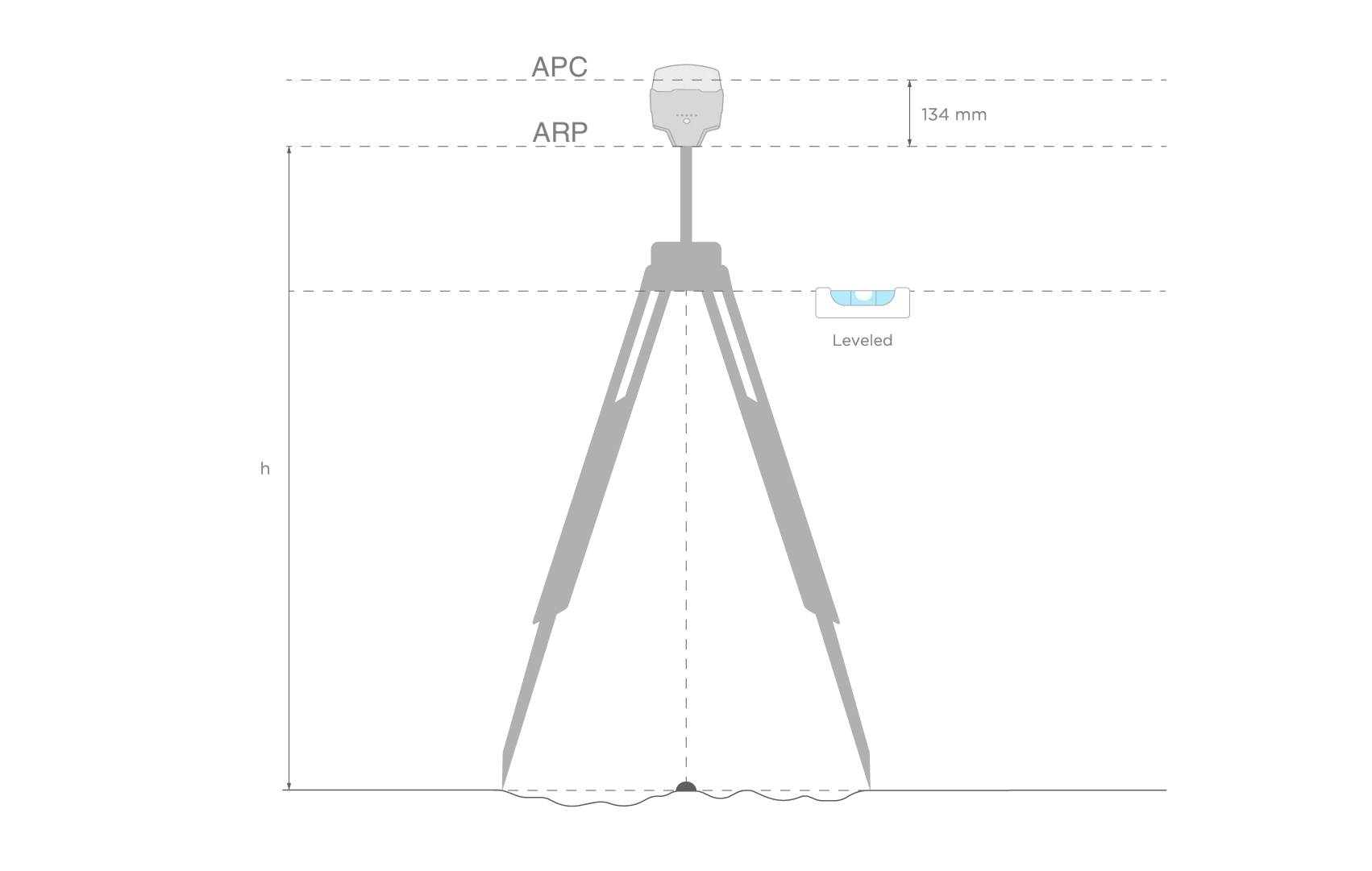
Point de référence de l'antenne
Le point de référence de l'antenne est le point central à la base du récepteur. Il est utilisé pour le calcul de la hauteur de l'antenne.
Surface
La zone d'un objet est la quantité totale d'espace enclos par sa forme sur une surface plane.
Ratio AR
Ceci est le résultat du test de ratio effectué sur la solution potentielle « Fix », il montre combien de fois la meilleure solution est meilleure que la suivante. Si ce nombre est supérieur à 3, Reach considérera la solution RTK comme Fixée.
Ce paramètre correspond uniquement aux appareils Reach monobande (Reach RS/RS+, Reach Module/M+).
Base
La base est l'un des récepteurs qui agit comme une station de référence dans les scénarios RTK ou PPK. Il s'agit d'une unité statique avec les coordonnées déterminées qui envoie des corrections à l'unité mobile ou au rover. Si la base est située sur un point connu, elle fournit une précision absolue.
Journal de correction de la base
Ce journal contient les corrections de la station de base au format RTCM3.
Base de référence
La base de référence est la distance entre un rover et une base. Si la base de référence est plus grande que recommandée, la solution sera moins précise, le temps de fixation sera plus long ou elle ne sera pas calculée du tout.
Sortie de base
La sortie de base est la donnée envoyée par une station de base à un rover. Elle contient des corrections pour améliorer la précision des informations de positionnement. Dans l'application Emlid Flow, sur l'écran de sortie de base, vous pouvez configurer comment votre base envoie des corrections de la manière suivante : série, TCP, NTRIP, Bluetooth, ou LoRa. Les appareils Reach supportent la sortie de base au format RTCM3.
BeiDou
BeiDou est un système de navigation chinois. En 2000, BeiDou-1 ne couvrait que la Chine. Puis, en 2012, BeiDou-2 a commencé à couvrir la région Asie-Pacifique. Depuis 2015, BeiDou offre une couverture mondiale. Nous vous recommandons d'utiliser ce système si vous vous trouvez dans la région Asie-Pacifique.
Mises à jour bêta
Les mises à jour bêta sont des versions logicielles préliminaires utilisées pour les tests et les retours. Elles aident les développeurs à trouver et à corriger les problèmes, à améliorer les fonctionnalités et à recueillir les avis des utilisateurs pour améliorer la qualité du logiciel avant la version officielle.
Mode client
Le mode client signifie que Reach est connecté à un réseau Wi-Fi externe.
Continu
Continu est une stratégie pour résoudre les ambiguïtés en RTK et PPK. Dans ce cas, les ambiguïtés sont résolues époque par époque. Moins stable que Fix-and-Hold, mais sans risque de maintenir un faux fix.
Système de coordonnées
Le système de coordonnées est un système local, régional ou global basé sur des coordonnées utilisé pour localiser des entités géographiques. Un système de référence spatial définit une projection de carte spécifique, ainsi que des transformations entre différents systèmes de référence spatiaux.
Entrée de correction
Il s'agit de la partie des paramètres du rover responsable de la configuration de l'acceptation des corrections. En utilisant la configuration de l'entrée de correction dans l'application Emlid Flow, vous pouvez choisir la manière dont votre rover reçoit les corrections : via Série, TCP, NTRIP, Bluetooth, ou LoRa. Les récepteurs Reach prennent en charge l'entrée de correction au format RTCM3.
Corrections
Les corrections sont les données utilisées pour éliminer les retards ionosphériques et troposphériques, ainsi que les erreurs d'horloge des satellites. La base statique transmet les corrections au rover en mouvement dans le scénario RTK.
CORS
Le réseau de stations de référence fonctionnant en continu ou réseau CORS est le réseau de stations statiques qui fournissent des données GNSS exactes (phase de porteuse, portée du code, etc.) ainsi que des corrections. Les géomètres peuvent accéder à ces informations pour augmenter la précision de leurs données d'arpentage post-traitées ou pour travailler en RTK sur site.
Delta E/N
Le Delta E/N entre les points A et B est la différence de leurs coordonnées le long des axes Est et Nord correspondants.
Dilution de précision ou DOP
La dilution de précision ou DOP est le terme utilisé pour évaluer la position géométrique des satellites par rapport au récepteur. Lorsque les satellites sont trop proches les uns des autres dans le champ de vision, cela signifie que la géométrie des satellites est faible (une valeur DOP élevée). Si la distance entre les satellites est suffisante et qu'ils sont répartis uniformément et couvrent plus d'espace, la géométrie est considérée comme forte, donc la valeur DOP est faible. Plus la DOP est faible, plus vos données sont précises. Une bonne valeur DOP est considérée comme étant inférieure à 2.
Direction (azimut)
La direction (azimut) d'une ligne AB, ou du point A au point B, est un angle horizontal en degrés, mesuré au point A dans le sens des aiguilles d'une montre entre la direction du nord et la direction du point B.
Adresse IP dynamique
Une adresse IP dynamique est une adresse IP (Internet Protocol) qui est automatiquement attribuée à votre appareil Reach par un serveur DHCP (Dynamic Host Configuration Protocol) chaque fois que votre appareil Reach se connecte au réseau ou redémarre. Ces adresses sont temporaires et peuvent changer avec le temps, contrairement aux adresses IP statiques, qui restent les mêmes.
Masque d'élévation
Le masque d'élévation peut être configuré dans les paramètres RTK de l'application Emlid Flow. Les satellites dont l'élévation est inférieure à celle définie seront exclus du calcul. Le paramètre par défaut est de 15 degrés. En général, les satellites avec une élévation plus faible fournissent des mesures trop bruitées car le signal traverse la majeure partie de l'atmosphère.
Emlid Flow
Emlid Flow est l'application mobile créée par Emlid. Elle est utilisée pour contrôler et configurer les récepteurs Reach, créer des projets, collecter des points, etc.
ENU
L'un des formats disponibles pour la diffusion de position des appareils Reach. Protocole texte simple pour les composantes Est, Nord et UP de la ligne de base ainsi que l'état de la solution.
ERB
L'un des formats pour la diffusion de position disponible pour les appareils Reach. Utilisé pour la communication avec ArduPilot. ERB signifie Protocole binaire Emlid Reach.
Connecteur inférieur externe
Le connecteur inférieur externe est un connecteur à 9 broches situé à la base du Reach RS/RS+, RS2/RS2+ et RS3. Il est utilisé pour fournir une alimentation constante à partir d'une batterie externe, pour établir une communication RTK avec des appareils tiers et pour transmettre la position de Reach à d'autres appareils ou applications tierces. Il utilise le protocole de communication série RS-232.
Fix-and-Hold
Fix-and-Hold est une stratégie pour résoudre les ambiguïtés dans RTK et PPK. Après la première ambiguïté, la solution fix les garde contraintes. Le fix est plus stable, mais en cas de première initialisation incorrecte, il faudra plus de temps pour se rétablir et s'initialiser correctement. Vous pouvez le considérer comme si le fix avait de l'inertie.
Rapport complet sur le système
Un rapport complet sur le système est un outil utilisé pour faciliter les rapports de problèmes. Il est fourni dans une archive ZIP et contient les journaux du système et les détails techniques de votre appareil, ainsi que certaines informations sensibles comme vos identifiants NTRIP ou vos mots de passe réseau. C'est pourquoi nous ne recommandons pas de partager le rapport publiquement. Ils sont utilisés pour déboguer les cas complexes avec l'assistance.
Galileo
Galileo est un système de navigation par satellite européen. Il a commencé à fonctionner en 2011 et dispose désormais d'une couverture mondiale.
Datum global
Le datum global est un système de référence de coordonnées ellipsoïdal utilisé par le récepteur pour mesurer les coordonnées avant l'application de toute transformation.
Pente
La pente d'une ligne est la mesure de son inclinaison, avec des valeurs plus élevées représentant des pentes plus raides et 0 % indiquant une ligne horizontale.
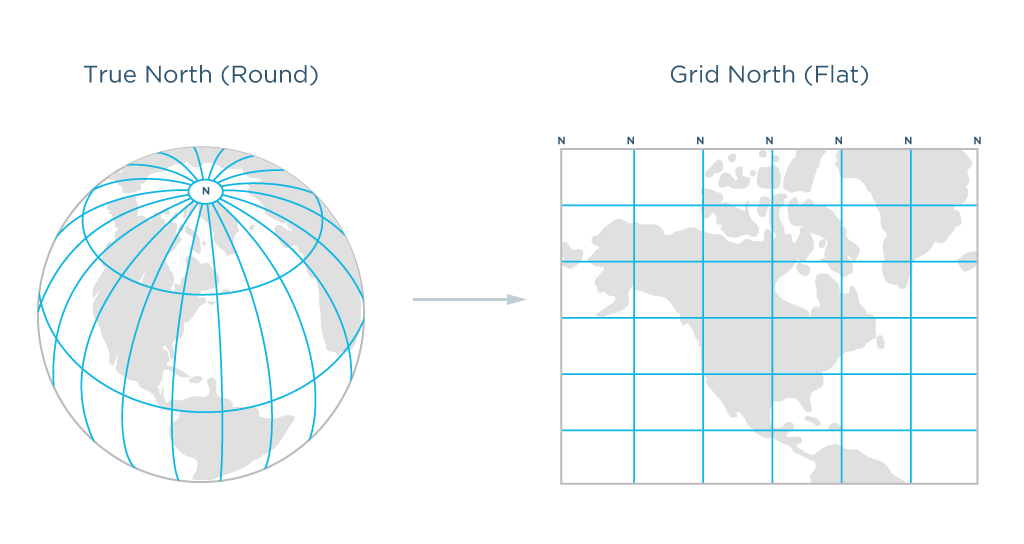
Azimut nord de la grille
L'azimut nord de la grille est l'angle mesuré dans le sens des aiguilles d'une montre entre une ligne parallèle au méridien central et la direction vers un point d'intérêt (une ligne droite entre deux points sur le plan plat de la projection).
Distance de la grille
La distance de la grille est la distance mesurée sur le plan plat de la projection.
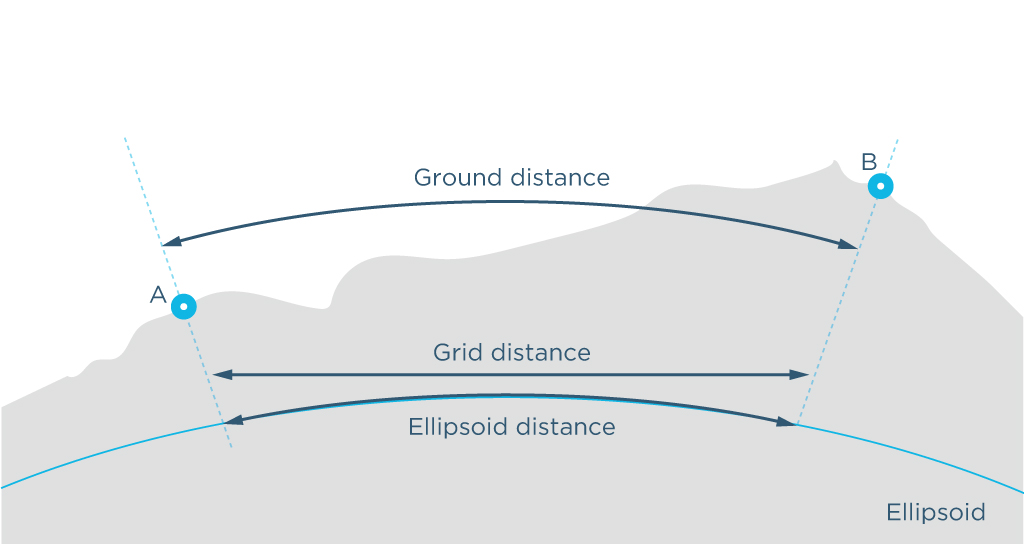
Distance au sol
La distance au sol est la distance mesurée sur la surface réelle de la Terre, en tenant compte de l'altitude moyenne des points mesurés.
Point de contrôle au sol ou PCS
Un point de contrôle au sol est un point sur une surface avec des coordonnées connues. Les PCS sont activement utilisés dans la cartographie aérienne et la photogrammétrie. Les géomètres placent des PCS sur la zone et les marquent de manière à ce qu'ils soient visibles depuis le drone. Les PCS sont ensuite relevés pour trouver leurs coordonnées exactes et utilisés comme points de référence pour le traitement futur des données.
GIS
Le système d'information géographique ou GIS est un système de collecte, de stockage, d'analyse et de visualisation graphique des données spatiales et des informations relatives aux objets requis.
GLONASS
GLONASS est un système global de navigation par satellite. Il a été créé comme une alternative au GPS en Union soviétique et lancé pour la première fois en 1982.
Mode RA GLONASS
Un paramètre de traitement permettant d'activer et de désactiver la résolution des ambiguïtés pour le signal GLONASS séparément. Contrairement au GPS, tous les satellites GLONASS émettent sur des fréquences différentes, ce qui entraîne des biais inter-chaînes (ICB) uniques pour chaque modèle de récepteur.
Les appareils Reach peuvent corriger les ICB GLONASS, permettant l'utilisation de RA GLONASS avec des bases non-Reach telles que les diffuseurs NTRIP. La recommandation générale est de toujours activer le RA GLONASS.
Ce paramètre correspond uniquement aux appareils Reach monobande (Reach RS/RS+, Reach Module/M+).
GNSS
Le Système mondial de navigation par satellite ou GNSS est un système conçu pour déterminer la localisation (coordonnées géographiques) des objets terrestres, aquatiques et aériens. Ces systèmes sont composés d'équipements spatiaux, d'un segment terrestre appelé systèmes de contrôle et de récepteurs individuels. Le fonctionnement du GNSS repose sur la mesure de la distance entre l'antenne de l'objet (récepteur) et les satellites dont la position est connue avec une grande précision.
GPS
Le Système de positionnement global ou GPS est un système mondial de navigation par satellite qui mesure la distance, le temps et la position dans le système de coordonnées mondiales WGS 84. Le système a été développé en 1978 et est exploité par les États-Unis.
Plan de sol
Un plan de sol est une plaque conductrice fournissant une isolation pour l'antenne. Il peut s'agir d'une pièce de métal, d'un toit de voiture, d'un toit en métal d'un bâtiment, etc. Il est recommandé d'utiliser au moins un plan de sol de 70x70 mm.
Adaptateur pour sabot
Le sabot est un point sur le dessus d'un appareil photo utilisé pour y attacher des accessoires ou d'autres équipements. En utilisant l'adaptateur pour sabot, vous pouvez connecter votre caméra au Reach M2/M+ pour la cartographie par drone.
Mode point d'accès
Le mode point d'accès signifie que le Reach diffuse son propre réseau Wi-Fi.
Positionnement cinématique
Le positionnement cinématique est l'un des deux modes de positionnement. Cela implique que le rover se déplace pendant le processus de positionnement.
LLH
L'un des formats disponibles pour la diffusion de position des appareils Reach. Protocole texte simple pour la latitude, la longitude et la hauteur ainsi que l'état de la solution.
Localisation
La localisation en GNSS est une fonctionnalité pour calculer les paramètres du système de coordonnées locales ou ajuster celui existant pour correspondre aux points de contrôle dans la zone d'arpentage.
Radio LoRa
La radio Long Range ou LoRa est utilisée pour que les récepteurs Reach envoient ou reçoivent des corrections sans connexion Internet. Le Reach RS3/RS2/RS2+/RS+ est équipé d'une radio LoRa interne. Le Reach M2/M+ dispose d'une radio LoRa externe disponible : vous pouvez la connecter via le port S2. La radio fonctionne dans un seul sens : elle envoie soit des corrections, soit les reçoit. En utilisant la modulation LoRa, il est possible d'atteindre jusqu'à 19 km (11,8 mi) en ligne de mire.
Emplacement fictif
La fonctionnalité d'emplacement fictif des appareils Android vous permet de changer manuellement l'emplacement de votre appareil vers n'importe quel autre endroit. Dans le cas des appareils Reach, cela permet aux applications collectrices GPS d'obtenir les observations GPS directement depuis le récepteur au lieu du GPS interne de l'unité.
Point de montage
Le point de montage est une source de données de correction liée à la station de référence physique ou virtuelle spécifique choisie ou créée en fonction de votre emplacement respectivement. Lorsque vous recevez des corrections d'un VRS, vous devez activer l'envoi de la position de votre récepteur au format NMEA.
Récepteur multibande
Un récepteur multibande est un récepteur qui peut accepter des signaux du satellite sur plus d'une bande de fréquence. Cela signifie que le récepteur prend moins de temps pour établir la première solution fixe, a une base de référence plus longue et a plus de chances de maintenir la solution fixe dans des conditions de visibilité du ciel bloqué.
Chemins multiples
Le phénomène de chemins multiples se produit lorsque le signal GPS est dévié par des obstacles, de sorte que le récepteur GNSS détecte des signaux non seulement directement des satellites mais aussi des objets locaux. L'effet de chemins multiples entraîne une erreur dans les mesures de pseudo-intervalle et affecte donc la précision positionnelle.
Mode nuit
Le mode nuit vous permet de désactiver les LED jusqu'au prochain redémarrage de l'appareil Reach.
NMEA 0183
L'un des formats disponibles pour la diffusion de position pour les appareils Reach. Le standard le plus populaire de l'industrie. Messages pris en charge : GNRMC, GNGGA, GNVTG, GNGST, GNZDA, GNEBP, GPRMC, GPGSA, GPGGA, GPGSV, GPVTG, GPGST, GPZDA, GPEBP, GLGSA, GLGSV, GAGSA, GAGSV, GBGSA, GBGSV.
NTRIP
Le réseau NTRIP (Networked Transport of RTCM via Internet Protocol) est une source alternative de corrections. NTRIP permet à votre rover d'accepter des corrections via Internet sans qu'il soit nécessaire d'utiliser un second récepteur local comme base. Une station de référence collecte les données, puis les envoie au diffuseur NTRIP, où elles sont retransmises via le port Internet au rover client connecté via un port particulier et autorisé.
Nuage de points
Un nuage de points est un ensemble de sommets dans un système de coordonnées tridimensionnel. Les nuages de points sont créés avec des scanners 3D et sont utilisés en photogrammétrie et en modélisation 3D.
Collecte de points
La collecte de points est une fonctionnalité dans l'application Emlid Flow qui vous permet de trouver les coordonnées exactes du point. Le récepteur détermine les coordonnées (x, y, z) d'un point au sol et l'enregistre dans votre projet pour un traitement ultérieur.
Implantation de points
L'implantation de points est une fonctionnalité de l'application Emlid Flow qui permet de trouver des points avec des coordonnées connues sur le site.
Hauteur de la perche
Lors de la préparation de la collecte de points, configurez la hauteur de votre perche d'arpentage dans Emlid Flow. Cela aidera l'application à calculer automatiquement la hauteur de l'antenne.
Journal de position
Ce journal contient des informations positionnelles. Les appareils Reach peuvent enregistrer leur position dans les formats LLH, XYZ, ENU, NMEA et ERB.
Diffusion de position
Les appareils Reach peuvent envoyer les données de position à des applications GIS tierces et à des dispositifs externes, y compris des tracteurs, des drones, des robots et plus encore. La position peut être partagée via Série, TCP et Bluetooth. Différentes applications nécessitent différents formats de données positionnelles, c'est pourquoi Reach sort sa position dans les formats LLH, XYZ, ENU, NMEA et ERB.
PPK
Le positionnement cinématique post-traité est l'une des techniques utilisées pour les relevés de haute précision. Comme dans le RTK, deux unités sont nécessaires : une base et un rover. La principale différence est qu'en scénario PPK, il n'est pas nécessaire d'avoir une connexion en temps réel entre les deux unités. La base et le rover enregistrent des journaux séparément, et ces journaux sont traités ensemble plus tard à l'aide d'un logiciel de post-traitement spécifique, par exemple, RTKLib.
PPP
Le positionnement précis des points ou PPP est une technique utilisée pour déterminer les coordonnées précises au niveau centimétrique du point. Le récepteur placé sur un point enregistre des données pendant une certaine période. Ensuite, ces données sont envoyées aux services PPP.
Précision
La précision est la proximité de deux ou plusieurs mesures l'une par rapport à l'autre. La précision signifie que les coordonnées que vous avez collectées sont vraies par rapport à un autre objet. Dans ce cas, vous n'avez pas besoin des coordonnées exactes de géoréférencement des points, vous avez seulement besoin de savoir que les points collectés sont, par exemple, situés à la même distance les uns des autres. À ne pas confondre avec l'exactitude.
QZSS
QZSS signifie Système satellitaire quasi-zénithal — le système satellitaire japonais. Il sert principalement la région Asie-Pacifique, avec une attention particulière aux besoins du Japon en matière d'informations de positionnement précises et fiables. Le premier satellite a été lancé le 11 septembre 2010 et est devenu opérationnel en 2018.
Journal de données brutes
Un journal de données brutes contient des observations GNSS du récepteur sans le calcul des coordonnées précises. Il peut être enregistré en UBX ou directement au format standard RINEX de l'industrie.
Reach Panel
Reach Panel est un outil qui vous permet d'accéder à votre Reach dans un navigateur, de surveiller son statut et d'obtenir des options supplémentaires telles que le téléchargement d'un grand nombre de journaux et la configuration des messages NMEA émis par votre Reach pour l'intégrer avec d'anciens équipements agricoles.
Positionnement relatif
Le positionnement relatif montre vos coordonnées par rapport à un autre objet de référence. La base envoie des informations sur sa position absolue au rover. En utilisant ces informations, le rover détermine sa position par rapport à la base avec une précision centimétrique.
RINEX
RINEX est un format standard de données brutes qui permet de stocker les observations satellitaires et les mesures de données de navigation effectuées par le récepteur. Il permet également le post-traitement des données reçues par diverses applications de différents fabricants de récepteurs et programmes.
RMS
La racine carrée de la moyenne de l'erreur au carré. Les calculs RMS sont utilisés pour évaluer la précision de la mesure de position.
Rover
Le rover est l'un des deux récepteurs GNSS utilisés pour collecter des données dans les scénarios RTK ou PPK. Le rover est une unité mobile : le géomètre utilise le rover pour enregistrer les points, tandis que le rover reçoit les corrections de la base statique.
RTCM3
RTCM3 est un format standard industriel pour la sortie des corrections.
RTK
La cinématique en temps réel ou RTK est l'une des techniques utilisées pour améliorer l'exactitude des données collectées auprès des satellites par le récepteur. Pour le RTK, deux récepteurs sont nécessaires : une base et un rover. La base envoie des corrections au rover en mouvement pendant la collecte de données.
RTKCONV
RTKCONV est un outil de RTKLIB qui convertit les données brutes UBX ou les données de correction de base RTCM3 d'un récepteur au format RINEX.
RTKLIB
RTKLIB est un package de programmes open-source pour le positionnement standard et précis avec GNSS. Il est utilisé pour le traitement des données PPK. Fonctionne avec les signaux de GPS, GLONASS, Galileo, QZSS, BeiDou et SBAS. Emlid produit la version de RTKLib adaptée aux produits Reach.
RTKPLOT
RTKPLOT est un outil de RTKLIB qui permet de visualiser et de tracer les solutions de position de RTKPOST ainsi que les données d'observation de RTKCONV.
RTKPOST
RTKPOST est un outil pour le post-traitement des logs bruts dans RTKLIB. Le résultat est stocké dans le fichier de solution de position en LLH dans des coordonnées géographiques – fichier POS. Dans ce fichier, nous obtiendrons une trajectoire du récepteur avec une précision au centimètre près.
Port série (UART, USB, RS-232)
Une interface de communication série dans laquelle les informations sont transférées séquentiellement bit par bit. Ce type de communication peut être réalisé via divers dispositifs comme UART, USB ou RS-232. Les récepteurs Reach peuvent utiliser un port série pour échanger les données de position et de correction avec des dispositifs tiers.
Rapport signal/bruit
Le rapport signal/bruit ou SNR est l'indicateur principal de la qualité de la réception. La valeur est égale au rapport entre la puissance du signal utile et la puissance du bruit. Vous pouvez trouver l'indicateur SNR sur l'écran principal de l'application Emlid Flow. Lorsque le SNR d'un satellite est supérieur à 45, il sera marqué en vert. Les barres grises indiquent le SNR de la station de base. Plus il y a de satellites dans la zone verte, plus vos mesures sont précises et plus la résolution des ambiguïtés est rapide.
Rapport système simple
Un rapport système simple est un outil utilisé pour faciliter les rapports de problèmes. Il fournit des informations sur la version d'Emlid Flow, les configurations et le réseau dans un format texte brut.
Récepteur monobande
Un récepteur monobande est un dispositif qui accepte les signaux du satellite sur une seule bande de fréquence. Il a le même niveau de précision qu'un récepteur multibande. Le récepteur monobande a une base de référence plus courte par rapport au multibande et pourrait ne pas trouver de solution fixe dans des conditions de vue du ciel bloquée.
Distance de la pente
La distance de la pente du point A au point B est la longueur de la ligne droite AB, mesurée le long de la pente, en tenant compte de la différence de hauteur entre les points.
Périmètre de la pente
Le périmètre de la pente d'un objet enclos est la somme des distances de la pente de ses côtés en tenant compte de la différence de hauteur.
Masque SNR
Le masque de rapport signal/bruit ou masque SNR est un outil qui filtre les satellites utilisés pour la solution fixe. Les satellites avec un faible SNR seront exclus du calcul. Le paramètre par défaut dans l'application Emlid Flow est 35.
État de la solution (fix, float, single)
L'état de la solution définit la précision qui peut être atteinte à ce moment. Il y a trois états de solution que vous pouvez voir en travaillant avec les dispositifs Reach.
SINGLE signifie que le rover a trouvé une solution en s'appuyant sur son propre récepteur et que les corrections de la base ne sont pas appliquées. La précision en mode autonome est généralement de l'ordre de plusieurs mètres.
FLOAT signifie que le rover reçoit des corrections de la base mais ne peut pas résoudre toutes les ambiguïtés, et dans ce cas, la précision est généralement de l'ordre de moins d'un mètre.
FIX signifie que le rover utilisant les corrections de la base a résolu les ambiguïtés dans son calcul de position et a atteint une solution avec une précision au niveau centimétrique.
Adresse IP statique
Une adresse IP statique est une adresse Internet Protocol (IP) fixe, configurée manuellement pour votre appareil Reach. Elle ne change pas au fil du temps, contrairement à une adresse IP dynamique qui peut être attribuée par un serveur DHCP (Dynamic Host Configuration Protocol) et peut changer à chaque fois que votre Reach se connecte au réseau ou redémarre. Vous pouvez attribuer à votre Reach une adresse IP statique lorsque vous le connectez à un nouveau réseau Wi-Fi dans l'application Emlid Flow ou le Reach Panel.
Positionnement statique
Le positionnement statique est l'un des modes de positionnement. Il suppose que le rover Reach est statique. Contraindre le système permet de résoudre les ambiguïtés plus rapidement ainsi que de produire des mesures avec une plus grande précision.
TCP
Le protocole de contrôle de transmission ou TCP est l'un des principaux protocoles de transfert de données Internet conçus pour contrôler le transfert de données. Un scénario typique d'utilisation du TCP est l'envoi de données de correction à une application sur le même réseau ou à un serveur avec une adresse IP publique.
Marque de temps
La fonction de marque de temps vérifie le moment exact où l'appareil photo prend une photo. Après le vol, vous pouvez traiter les journaux bruts de la base et d'un rover pour obtenir un fichier «*_events.pos». Ce fichier comprend des informations sur l'heure et les coordonnées de chaque photo. Vous pouvez utiliser un logiciel de géolocalisation pour écrire ces informations dans les données EXIF des photos.
Azimut nord vrai
L'azimut nord vrai est l'angle allant de 0 à 360 degrés mesuré dans le sens des aiguilles d'une montre entre le nord vrai et la direction vers un point d'intérêt.
UBX
UBX est le format de données brutes GNSS. Le protocole UBX est un protocole binaire propriétaire u-blox qui produit un format hexadécimal.
Taux de mise à jour
Le taux de mise à jour est une valeur qui indique la fréquence à laquelle le récepteur calcule et rapporte sa position. Pour les récepteurs Reach, nous recommandons un taux de mise à jour de 1 Hz sur la base et 5 Hz sur le rover.
VRS
La station de référence virtuelle (VRS) est un outil utile pour les longues lignes de base. C'est une station de référence imaginaire, inoccupée, générée à proximité de l'utilisateur RTK. Le rover envoie des données au diffuseur NTRIP. NTRIP permet d'unir les données de votre rover et les données des bases NTRIP denses et de modéliser une base virtuelle à côté de vous.
WGS 84
Le système géodésique mondial 1984 ou WGS 84 est le système global de paramètres géodésiques de la Terre, y compris le système de coordonnées géocentriques. Il a été accepté en 1984 et définit les coordonnées par rapport au centre de masse de la Terre, avec une erreur inférieure à 2 cm.
XYZ
L'un des formats pour la diffusion de position disponible pour les appareils Reach. Protocole de texte simple pour les coordonnées X, Y, Z ECEF ainsi que l'état de la solution.