Guide RTK senseFly
Vue d'ensemble
Dans ce tutoriel, vous trouverez des informations sur la manière de réaliser des relevés en RTK avec les drones senseFly et Reach RS2/RS2+.
Un guide étape par étape peut également être trouvé sur la base de connaissances senseFly.
Configuration de Reach RS2/RS2+
Dans cette partie, nous expliquerons comment configurer Reach RS2/RS2+ pour transmettre des corrections à l'ordinateur via Bluetooth.
Placement du récepteur Reach RS2/RS2+
La vidéo ci-dessous montre comment placer la base Reach RS2/RS2+ sur un point connu.
Pour découvrir d'autres façons de placer la station de base locale, consultez le guide de placement de la base.
Les étapes générales pour placer le récepteur de base sont décrites ci-dessous.
-
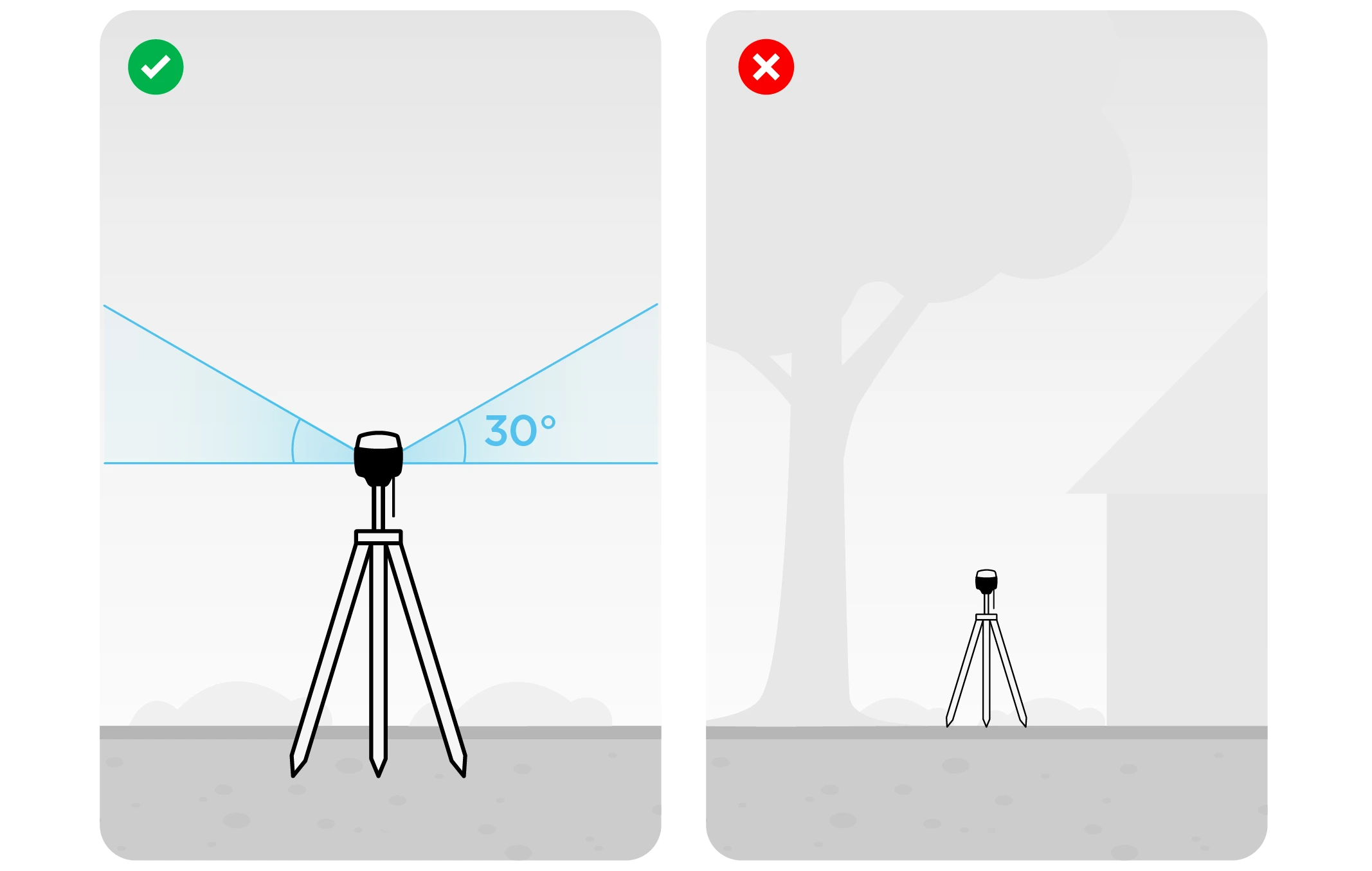
Assurez-vous de choisir un emplacement approprié pour placer la station de base Reach RS2/RS2+. Regardez les 2 images ci-dessous. L'image de gauche montre les conditions souhaitables pour l'emplacement de la base. Celle de droite est un exemple de mauvaises conditions environnantes telles que la vue réduite du ciel, des obstructions possibles ou de la végétation à proximité.
-
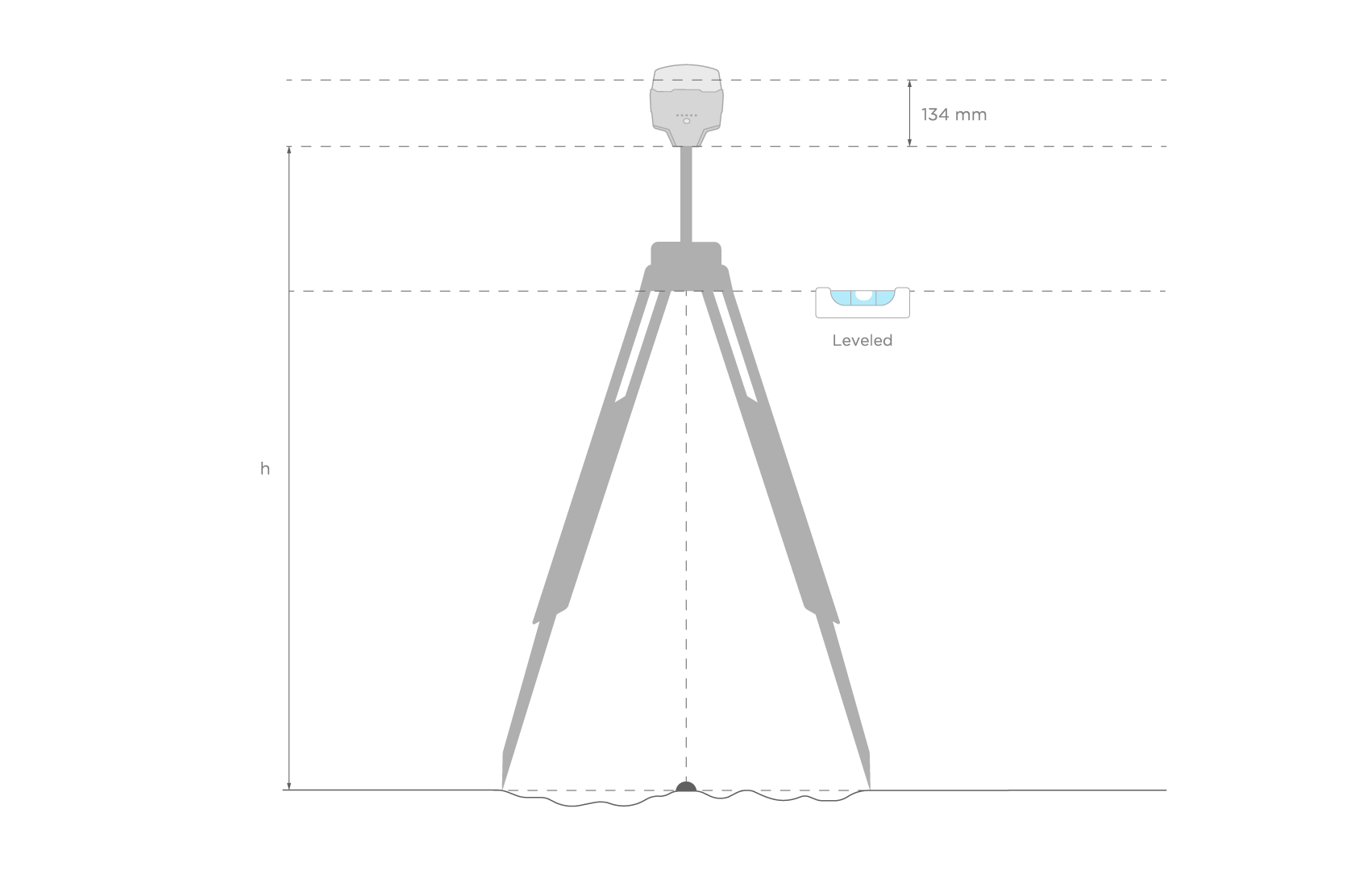
Assurez-vous que votre Reach RS2/RS2+ est placé précisément au-dessus du point marqué sur le trépied et nivelé.
-
Si vous configurez manuellement les coordonnées de la base, mesurez le décalage de hauteur de l'antenne.
remarqueLa hauteur de l'antenne est mesurée comme la distance entre la marque et le point de référence de l'antenne (ARP).
Pour le Reach RS2/RS2+, considérez la hauteur de l'antenne comme la distance entre la marque et le bas du Reach RS2/RS2+ (h sur la figure ci-dessous) plus 134 mm.
remarqueSi vous avez besoin d'une précision absolue au centimètre près, vous devez calculer une coordonnée de base absolue.
Si vous avez besoin d'une précision relative au centimètre près, vous pouvez moyenner la position de la base.
Appairage avec l'ordinateur
-
Ouvrez Emlid Flow et connectez-vous à votre Reach.
Étapes de connexion via point d'accèsPour en savoir plus, consultez le guide Connexion à Reach.
-
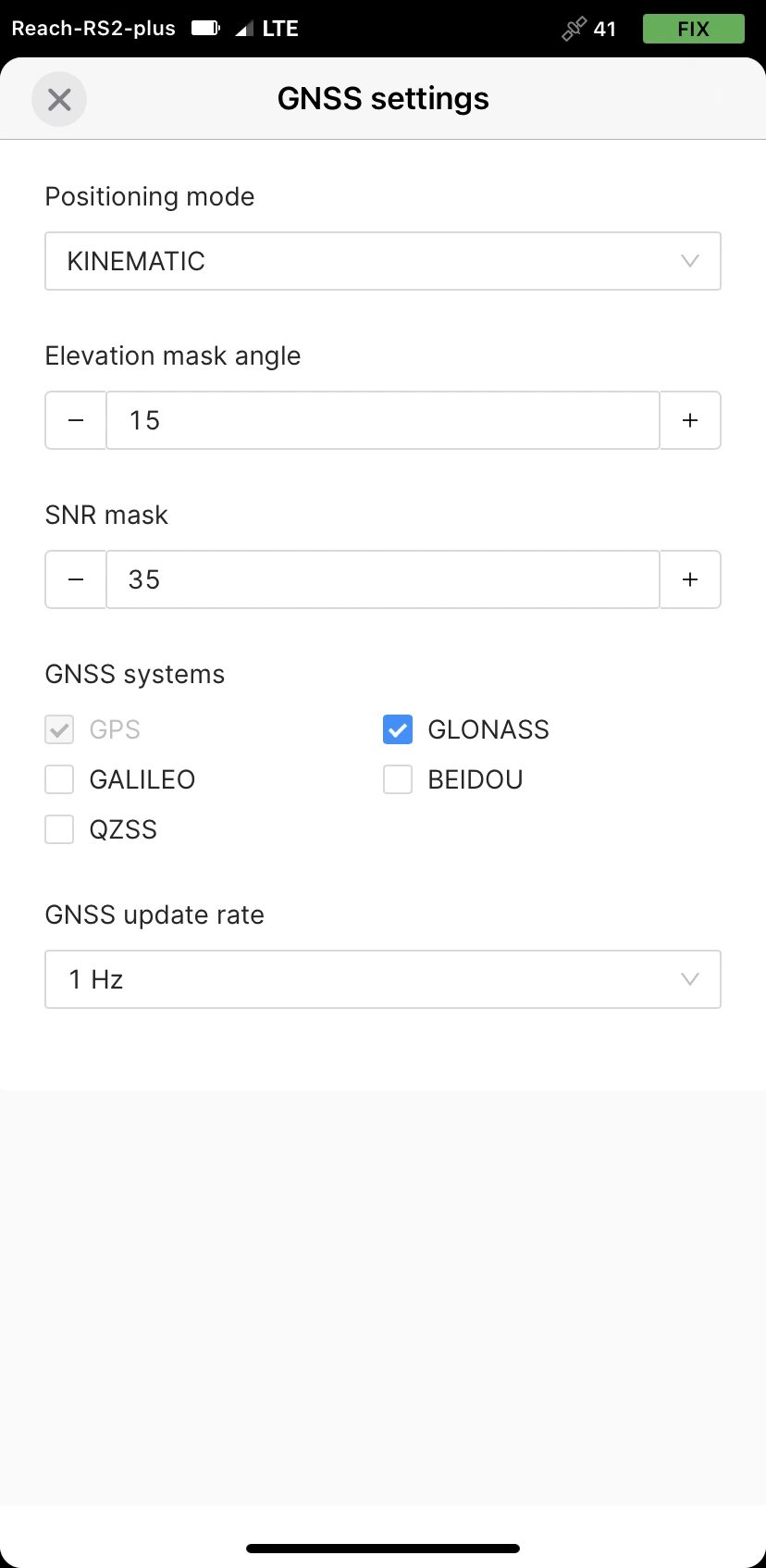
Sur l'écran Settings (Paramètres), appuyez sur GNSS settings (Paramètres GNSS).
-
Sélectionnez les constellations GNSS comme suit.
remarquePour travailler avec des drones eBee, activez le GPS et GLONASS à 1 Hz.
-
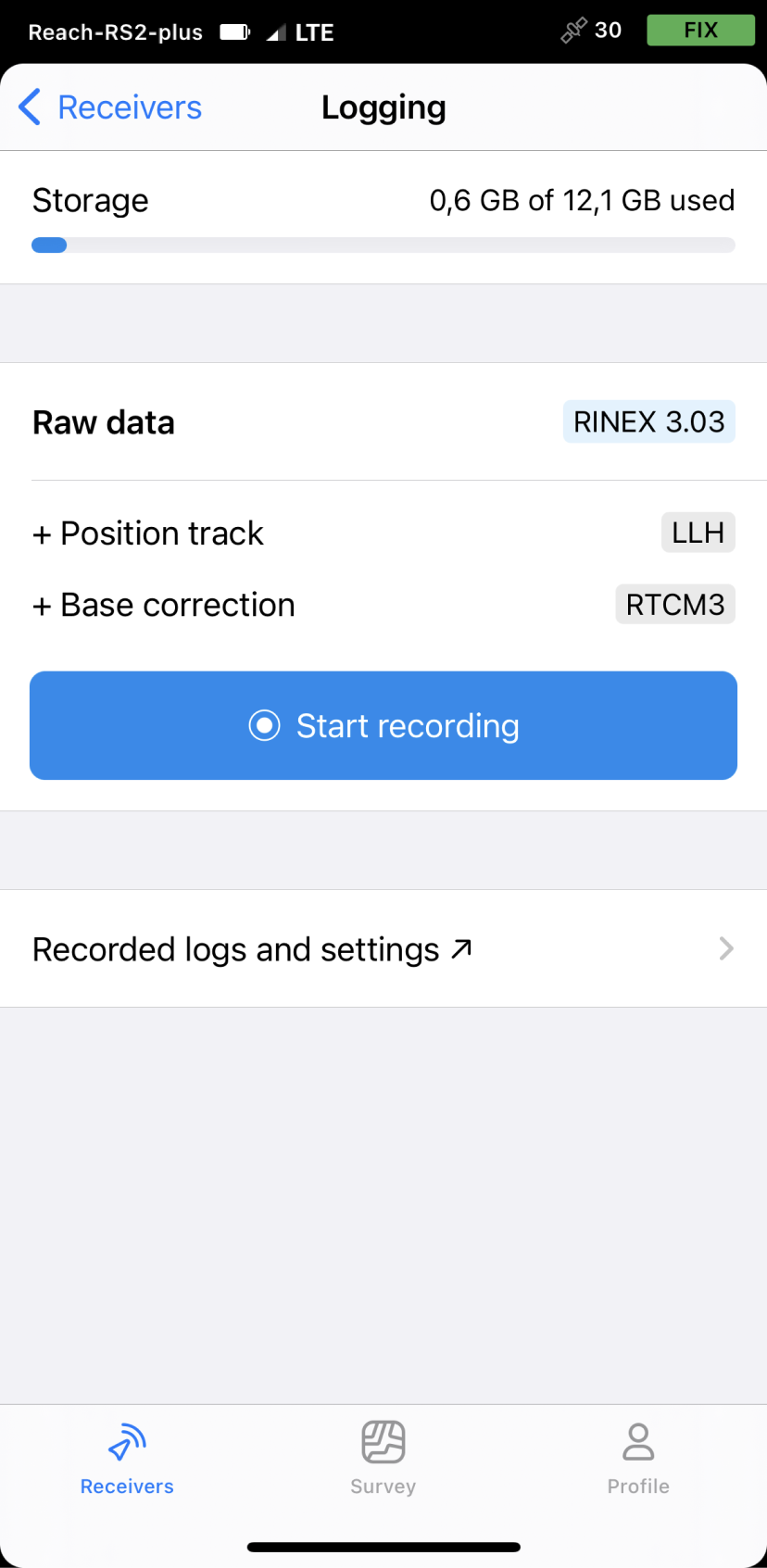
Retournez à l'écran Receivers (Récepteurs) et appuyez sur Logging (Enregistrement).
-
Appuyez sur le bouton Recorded logs and settings (Journaux et paramètres enregistrés).
-
Pour configurer l'enregistrement, appuyez sur le bouton d'engrenage bleu.
-
Dans le menu déroulant Format and presets (Format et préréglages), choisissez UBX. Appliquez les modifications et fermez l'écran Logging (Journalisation).
-
Allez dans Settings (Paramètres) et appuyez sur Bluetooth.
-
Activez Bluetooth en appuyant sur le bouton Turn on Bluetooth (Activer le Bluetooth).
-
Appuyez sur Discoverability (Visibilité) et activez l'option Discoverability (Visibilité). Appuyez sur Save (Enregistrer) pour appliquer les modifications.
-
Activez le Bluetooth sur votre ordinateur.
-
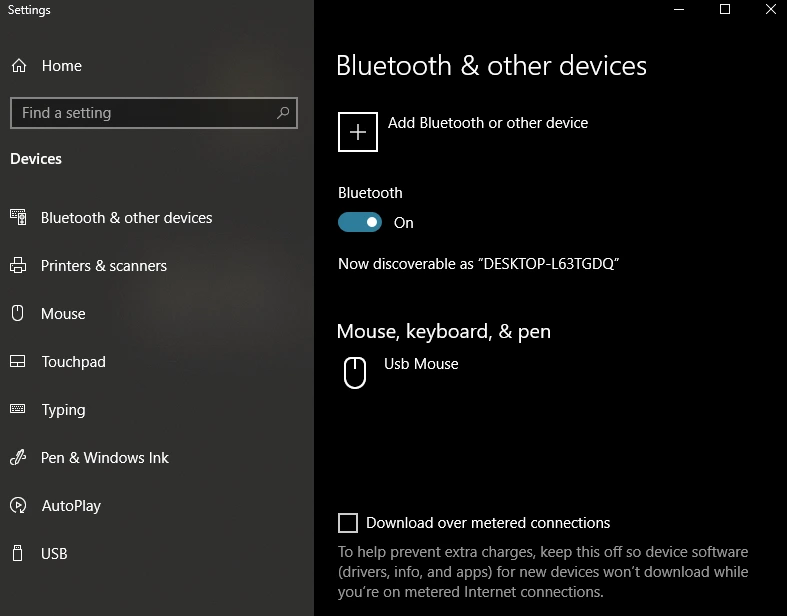
Ouvrez les paramètres Bluetooth.
-
Cliquez sur Add Bluetooth or other device (Ajouter un appareil Bluetooth ou autre).
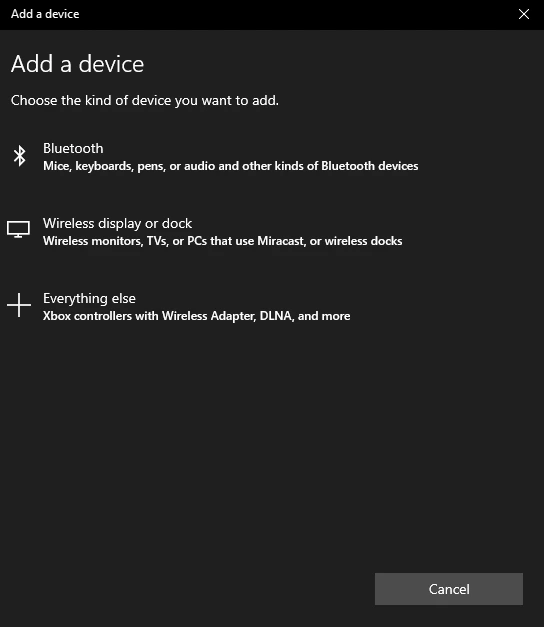
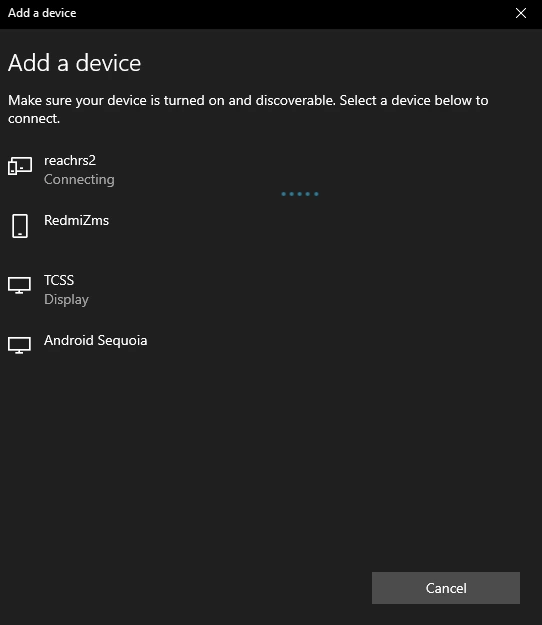
- Choisissez l'option Bluetooth dans la fenêtre Add a device (Ajouter un appareil).
- Assurez-vous que votre Reach RS2/RS2+ est détectable et apparaît dans la liste des appareils.
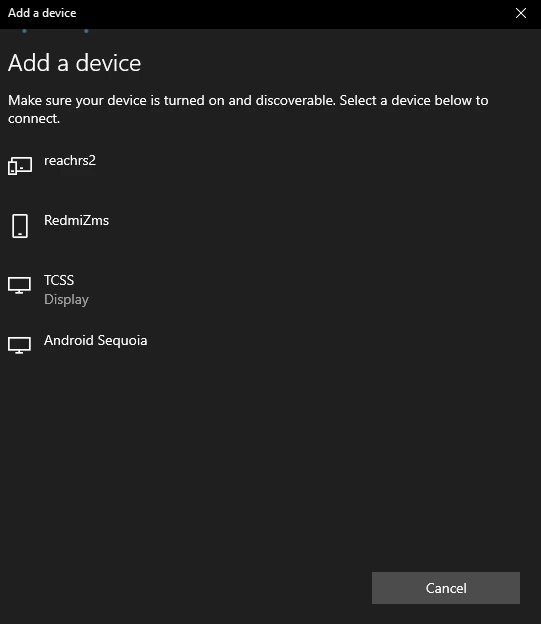
- Une fois que vous voyez Reach RS2/RS2+ dans la liste, connectez-vous à celui-ci.
Si la connexion est réussie, vous recevrez un message « Votre appareil est prêt à l'emploi ! » (Your device is ready to go !)
Vous pouvez maintenant passer à l'étape suivante.
Configuration de la sortie de la base
-
Sur l'écran Receivers (Récepteurs) dans Emlid Flow, appuyez sur Base output (Sortie de base).
-
Choisissez Bluetooth.
-
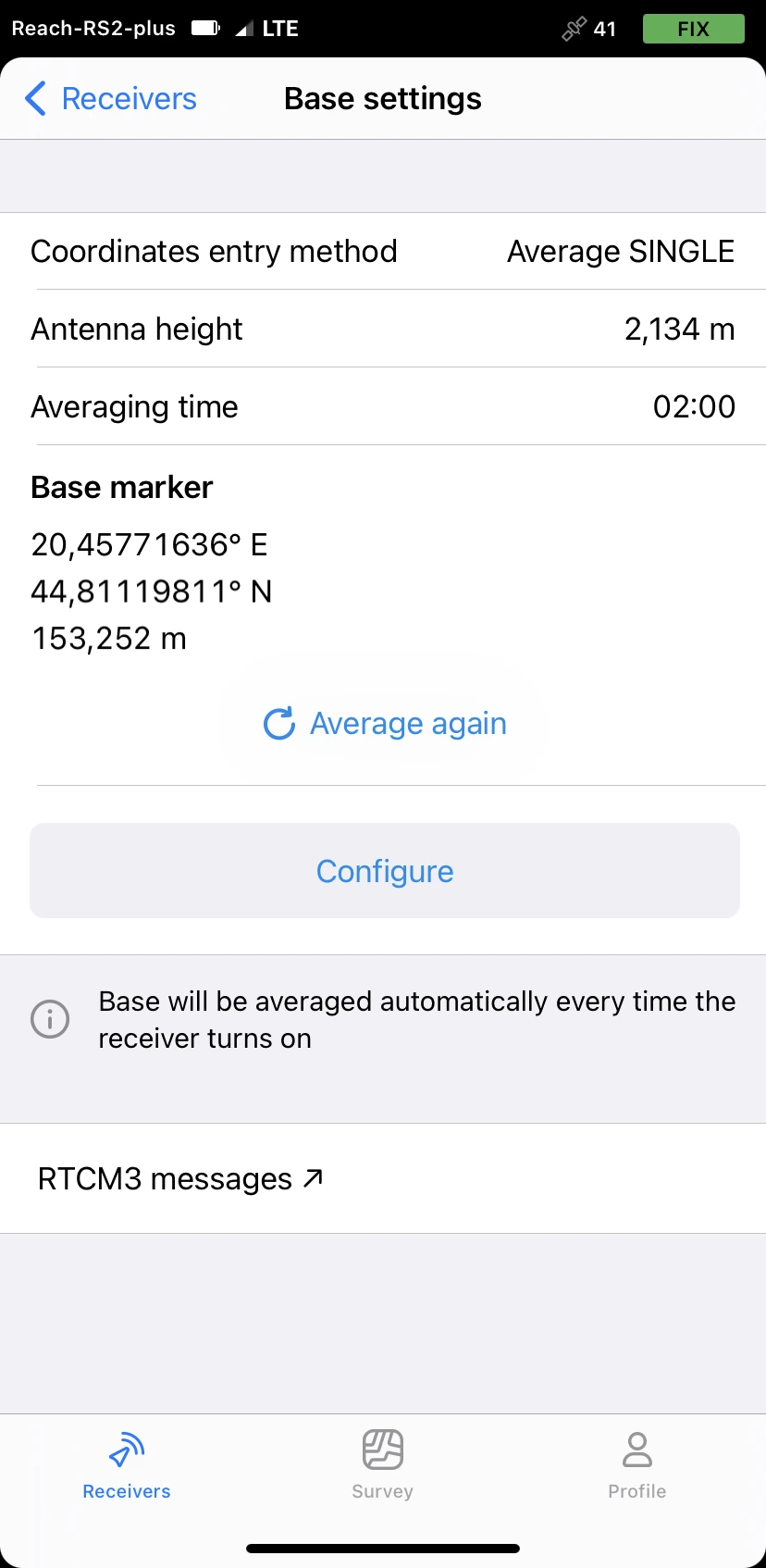
Retournez à l'écran Receivers (Récepteurs) et appuyez sur Base settings (Paramètres de base).
-
Choisissez Coordinate entry method (Méthode d'entrée des coordonnées). Dans ce guide, nous utilisons Average Single (Moyenne Single).
astucePour en savoir plus, consultez le guide Placer la base.
-
Remplissez le champ Antenna height (Hauteur de l'antenne), puis spécifiez l'Averaging time (Temps de calcul de la moyenne).
-
Appuyez sur RTCM3 Mesages (Messages RTCM3) et spécifiez les messages RTCM3 transmis.
Messages RTCM3 Type de message Messages requis minimum 1006 Coordonnées de la station ARP 1074 GPS MSM4 Messages optionnels pour d'autres GNSS 1084 GLONASS MSM4 1094 Galileo MSM4 1124 BeiDou MSM4 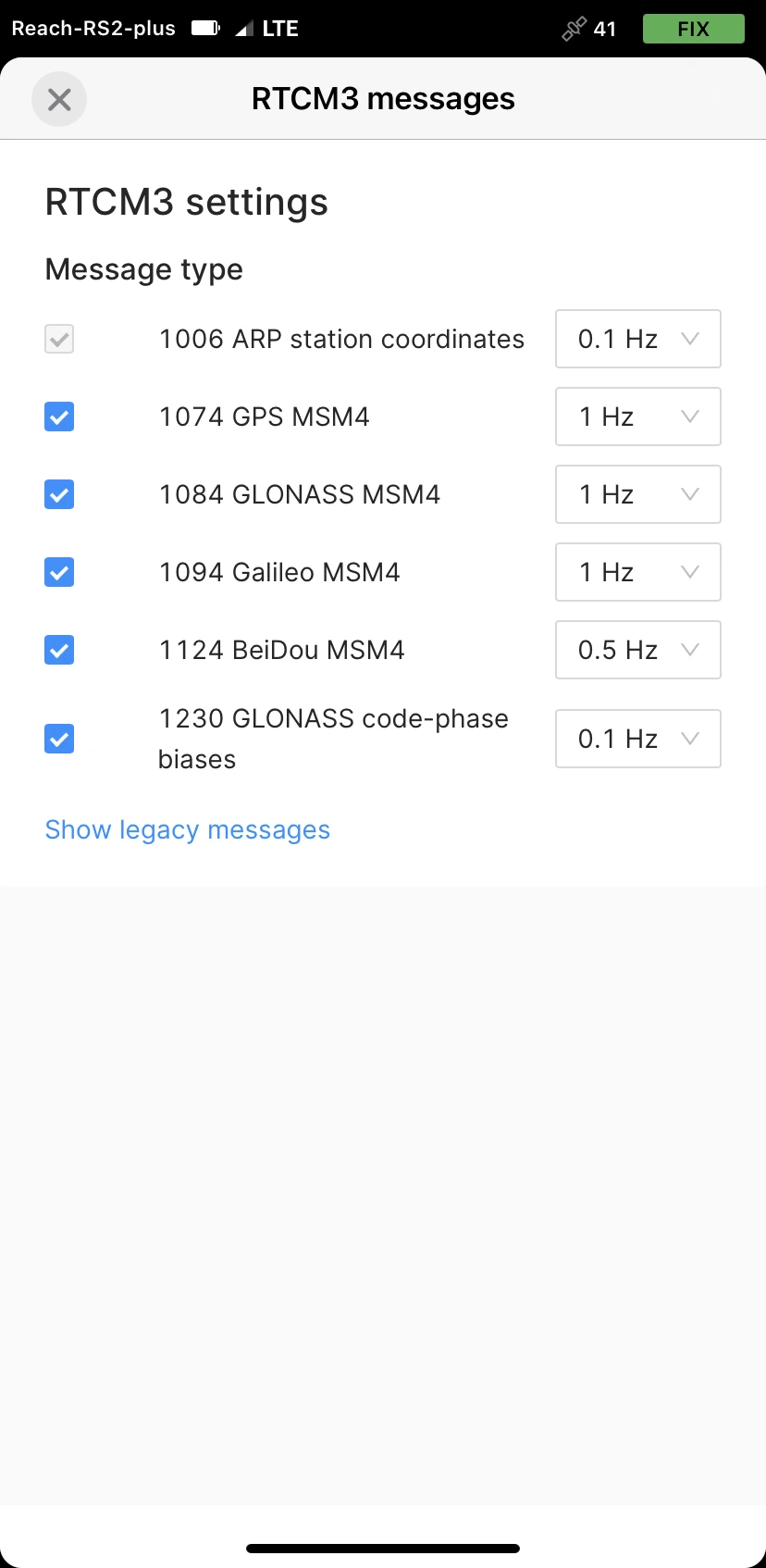
Vérification de la connexion
Vous devrez trouver quel port COM sur votre ordinateur est utilisé par Reach RS2/RS2+. Pour cela, nous vous recommandons d'utiliser le client PuTTY pour Windows.
-
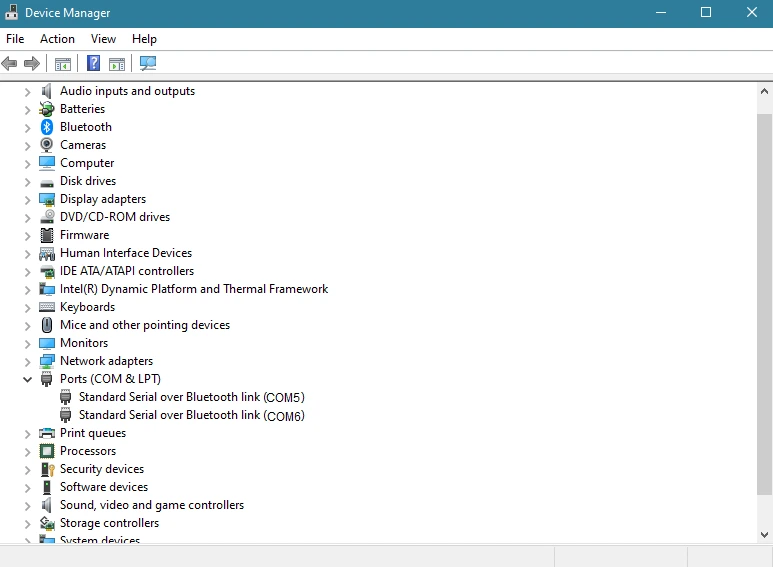
Ouvrez le Gestionnaire de périphériques sur votre ordinateur.
-
Vérifiez les ports « Standard Serial over Bluetooth » disponibles.
-
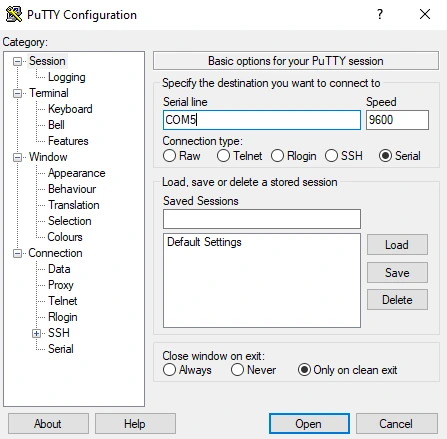
Ouvrez PuTTY.
-
Allez dans l'onglet Session.
-
Spécifiez le port COM dans Serial line (Ligne série).
-
Choisissez la vitesse à 9600.
-
Choisissez le type de connexion Série.
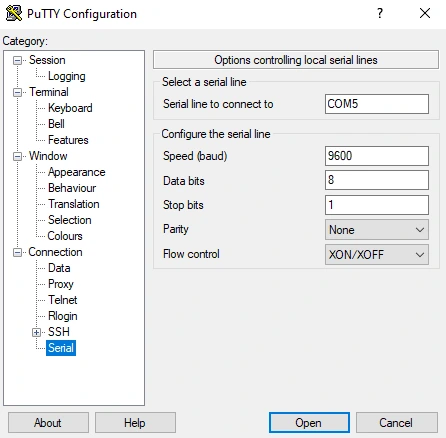
Vous pouvez faire de même dans l'onglet Série :
-
Allez dans l'onglet Série.
-
Spécifiez le port COM dans la Serial line to connect to (Ligne série à connecter).
-
Choisissez la vitesse à 9600.
-
Appuyez sur Open (Ouvrir)
Si vous avez choisi le bon port, vous verrez les corrections de Reach RS2/RS2+ au format RTCM3 à l'écran. Si vous ne voyez pas les données arriver, choisissez un autre port COM dans la ligne série.
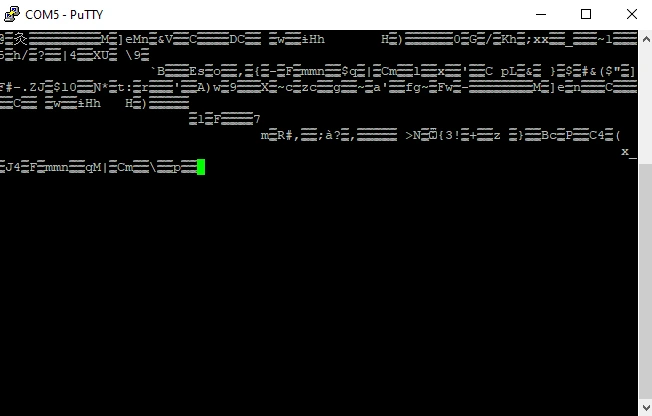
Vous êtes maintenant prêt à configurer le lien RTK dans eMotion3
Connexion à eMotion3
Nous allons maintenant vous montrer comment établir un lien RTK avec la base Reach RS2/RS2+ sur votre drone eBee.
-
Lancez eMotion3.
-
Créez une mission et allez dans l'onglet Mission.
-
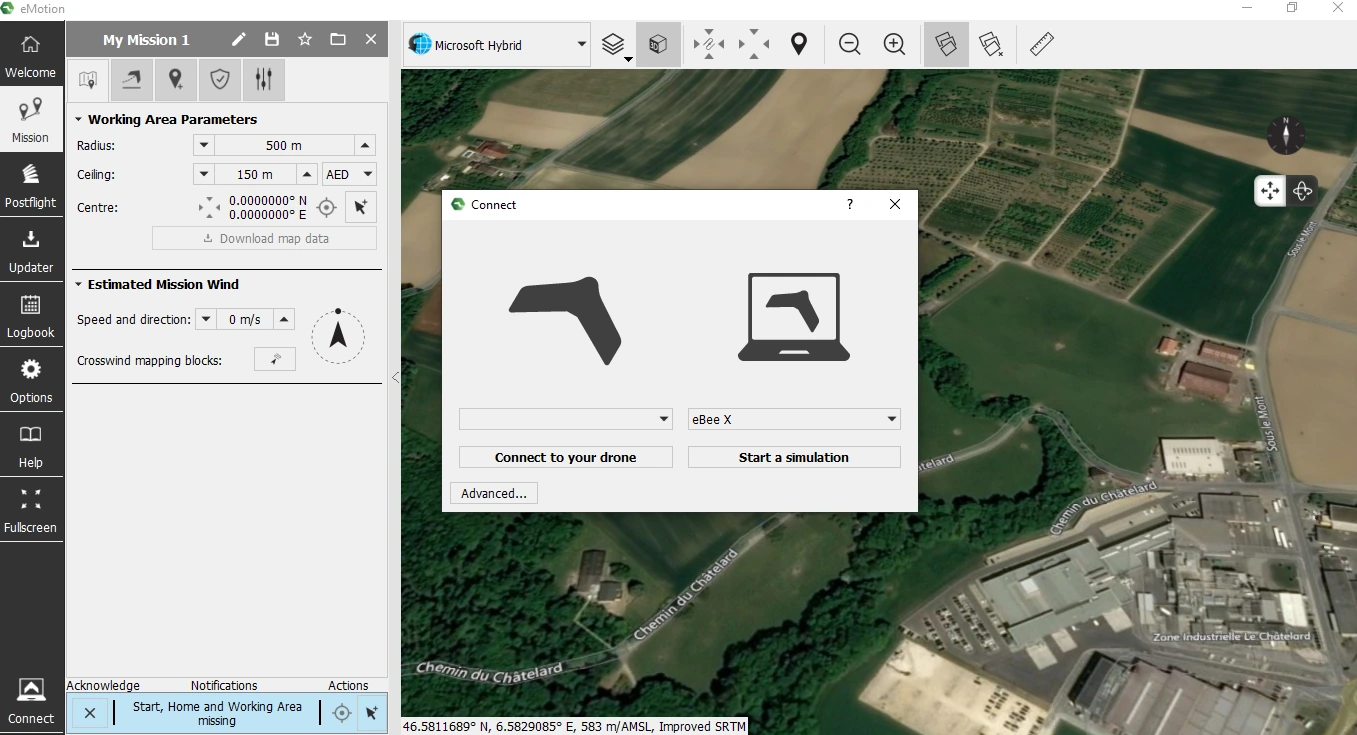
Appuyez sur le bouton Connect (Connecter). Connectez-vous au drone en appuyant sur Connect to your drone (Connexion à votre drone) ou simulez votre vol en appuyant sur Start a simulation (Démarrer une simulation).
-
Activez votre licence RTK/PPK dans l'onglet eBee plus upgrade (Mise à niveau eBee plus) du panneau du drone. Pour activer une licence pour la simulation, cochez la case Activate update for simulator (Activer la mise à jour du simulateur).
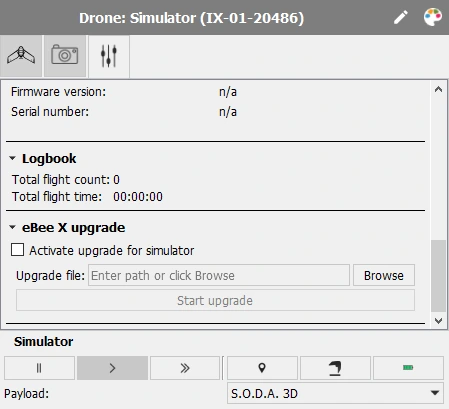
Vous pouvez maintenant voir l'onglet RTK activé sur votre panneau de mission à gauche.
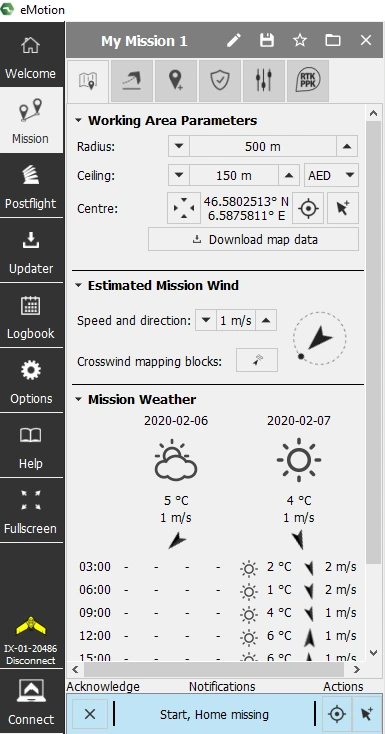
-
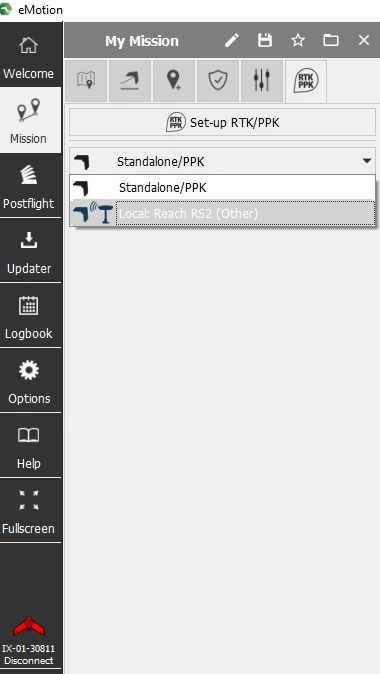
Allez dans l'onglet RTK du panneau de mission.
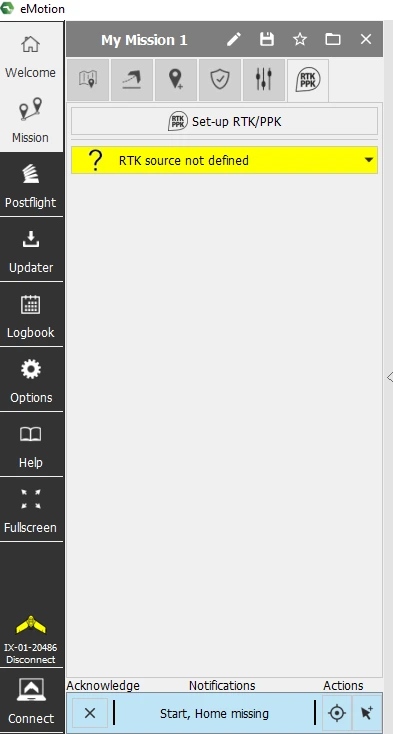
-
Appuyez sur Set-up RTK/PPK (Configurer RTK/PPK) pour configurer votre base.
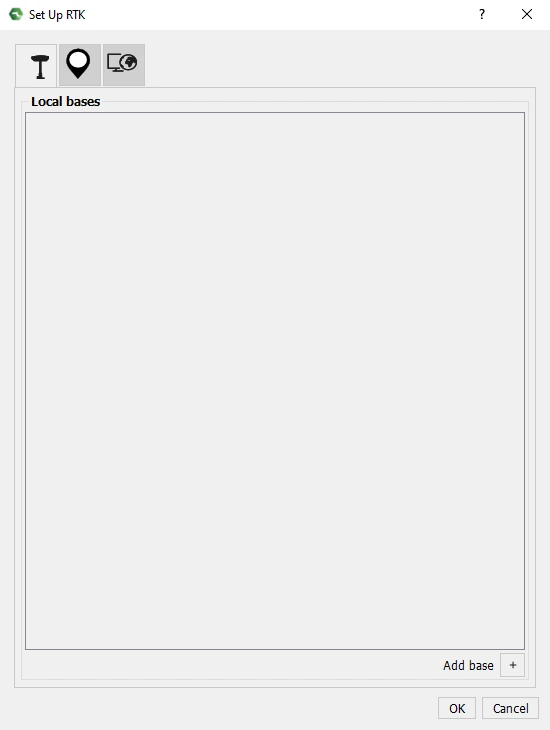
-
Dans la fenêtre ouverte, vous pouvez spécifier soit une station de base, des points de référence ou un VRS. Pour configurer la station de base, appuyez sur Add base + (Ajouter une base +) dans l'onglet Base.
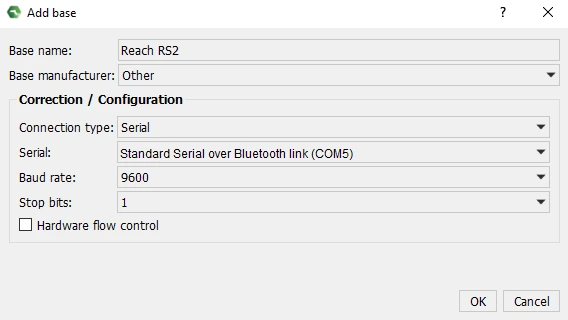
-
Réglez Reach RS2/RS2+ sur un nom de base.
-
Réglez Autre sur un fabricant de base.
-
Réglez le type de connexion sur Série.
-
Choisissez le port COM que vous avez vérifié à l'étape précédente.
-
Réglez le même débit binaire pour tous les appareils connectés.
-
Appuyez sur OK.
- Une fois la connexion configurée, vous pouvez choisir la station de base dans l'onglet RTK.
-
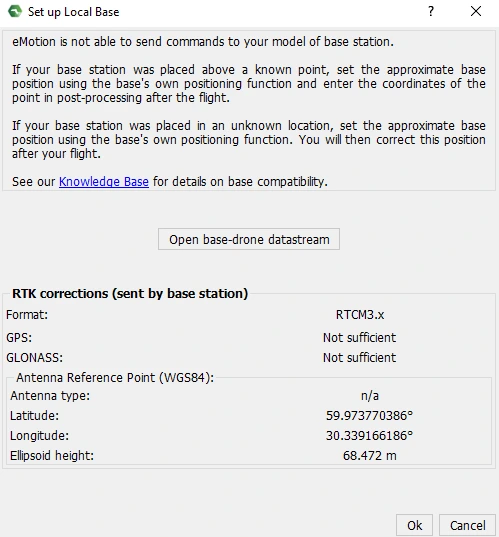
Appuyez sur la station de base choisie pour voir la fenêtre Set up Local Base (Configurer la base locale).
-
Appuyez sur Open base-drone datastream (Ouvrir le flux de données base-drone).
Si vous testez la configuration à l'intérieur, les champs GPS et GLONASS afficheront le message Not sufficient (Insuffisant).
- Vérifiez la position de la base que reçoit le drone.
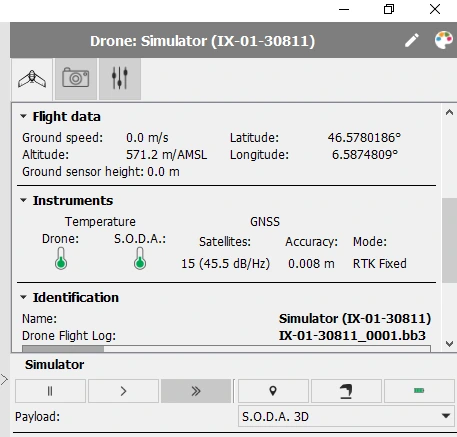
- Allez dans le panneau du drone. Dans l'onglet Instruments, vous pouvez voir que le drone fournit une précision au centimètre près et que le mode est RTK-fixed.
Vous avez maintenant configuré les corrections RTK sur votre drone à partir de Reach RS2/RS2+.