Intégration de Reach RS2/R2+ avec Mergin Maps pour Android
Ce tutoriel fournit des instructions étape par étape sur la manière d'intégrer votre Reach RS2/RS2+ avec Mergin Maps pour Android via Bluetooth.
Vue d'ensemble
Mergin Maps est une application mobile pour les appareils Android qui vous permet de collecter, partager et publier des géodonnées et de collaborer avec les équipes en utilisant la synchronisation instantanée avec QGIS.
Pour intégrer votre Reach RS2/RS2+ Mergin Maps via Bluetooth, vous aurez besoin des éléments suivants:
- Reach RS2/RS2+
- Un appareil sur Android
- L'application mobile Mergin Maps installée sur votre appareil Android
- Un compte Mergin Maps
Flux de travail
Pour intégrer votre Reach R2/RS2+ avec Mergin Maps, suivez les étapes ci-dessous.
Configuration de la réception des corrections dans Emlid Flow
Pour atteindre une précision au centimètre lors de l'arpentage avec Reach RS2/RS2+, configurez-le pour agir comme un rover en RTK de la manière suivante :
-
Configurez la communication RTK entre 2 unités Reach RS2/RS2+ via la radio LoRa selon le guide sur la configuration de la base et du rover.
-
Configurez votre Reach RS2/RS2+ pour recevoir les corrections d'un service NTRIP en suivant les étapes du guide de travail avec le service NTRIP.
Pour commencer à recevoir les corrections, assurez-vous que votre récepteur a une visibilité satellite.
Configuration du streaming de position à partir de Reach RS2/RS2+
Pour diffuser la position de votre Reach RS2/RS2+ au format NMEA vers l'appareil Android, procédez comme suit:
-
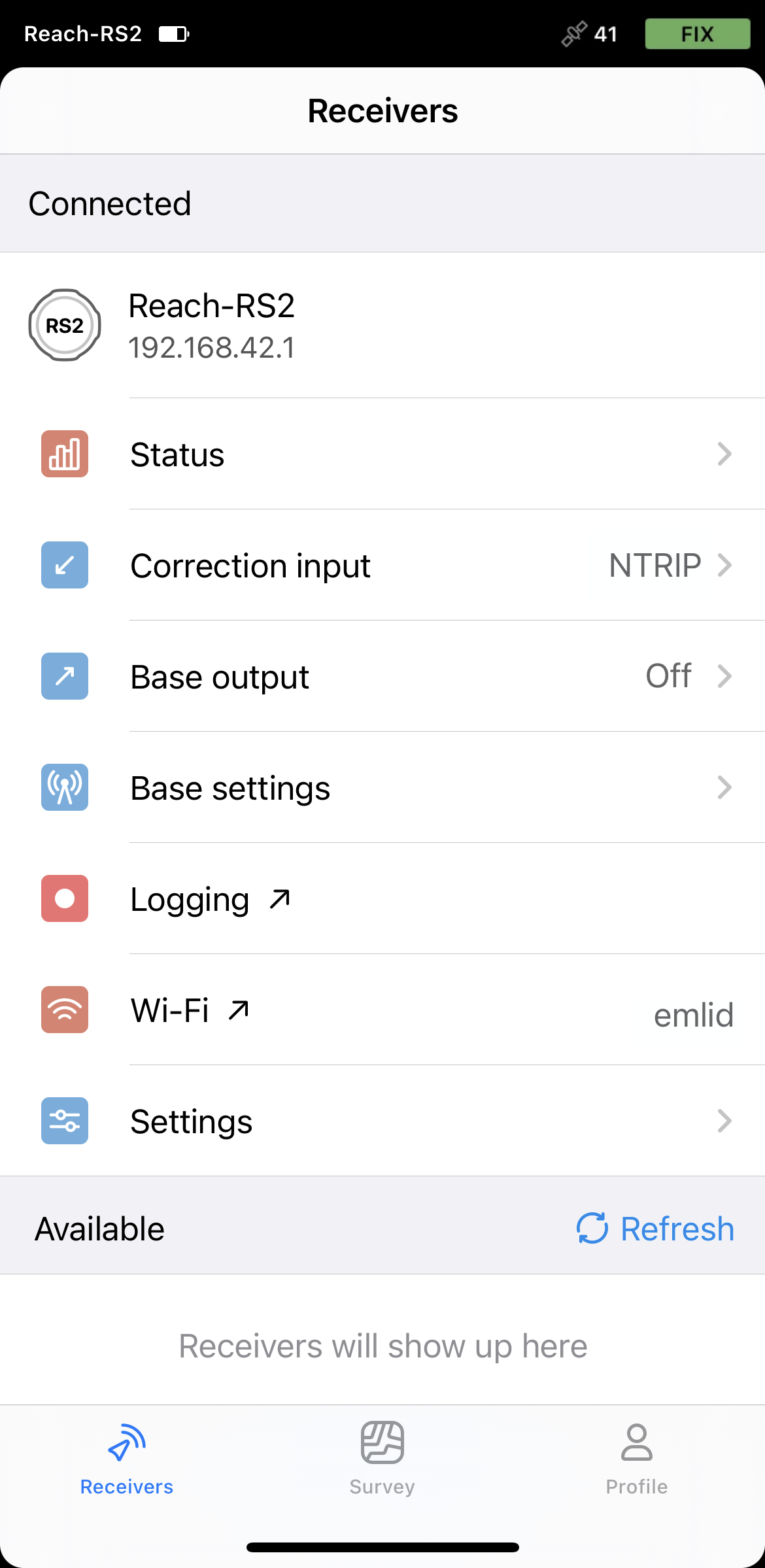
Ouvrez Emlid Flow et connectez-vous à votre Reach.
-
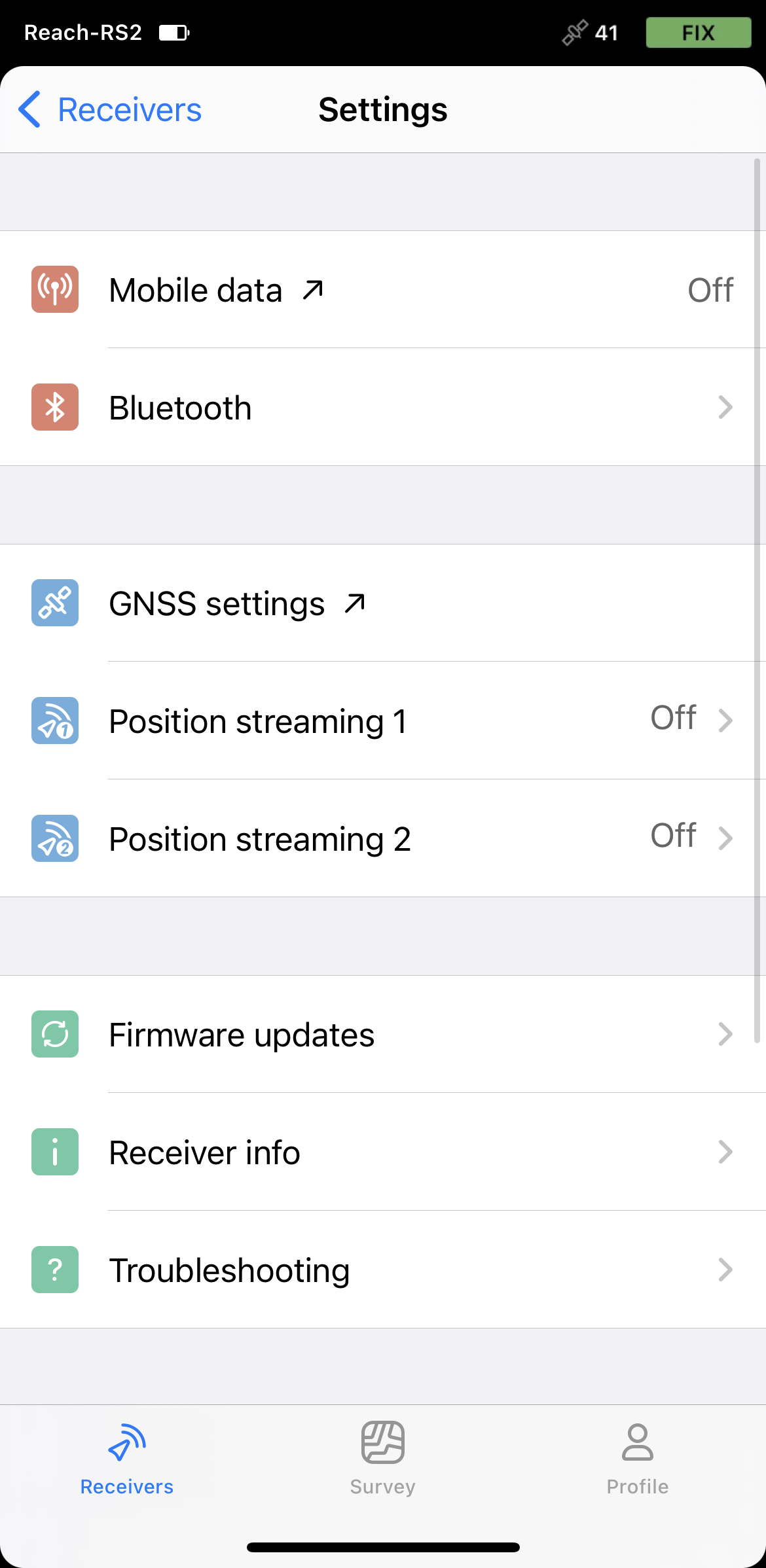
Allez dans les paramètres et appuyez sur Position streaming 1 (Diffusion de position 1).
-
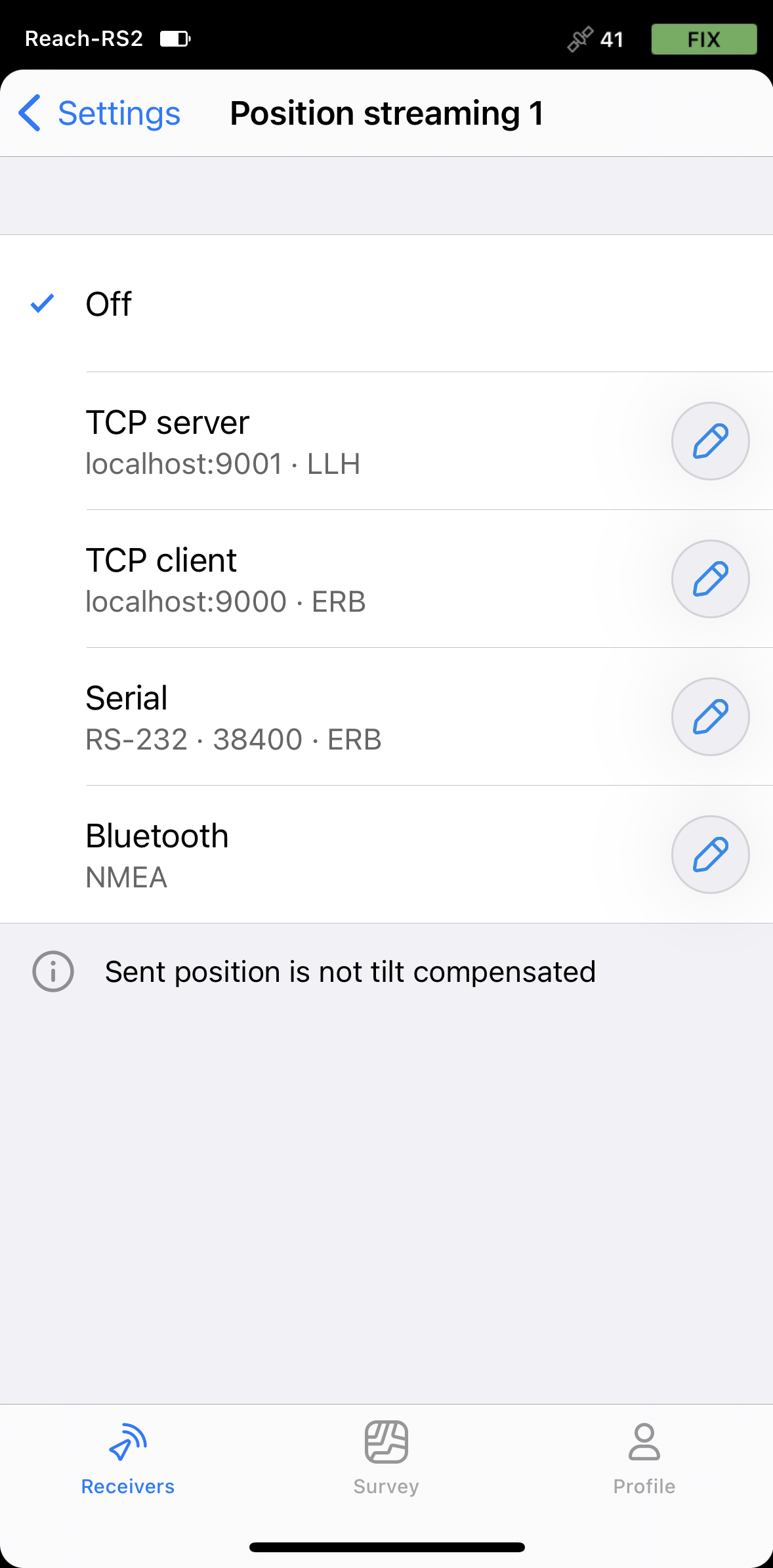
Sélectionnez Bluetooth.
-
Pour configurer la diffusion de position, appuyez sur le bouton Edit (Modifier) dans la case Bluetooth.
-
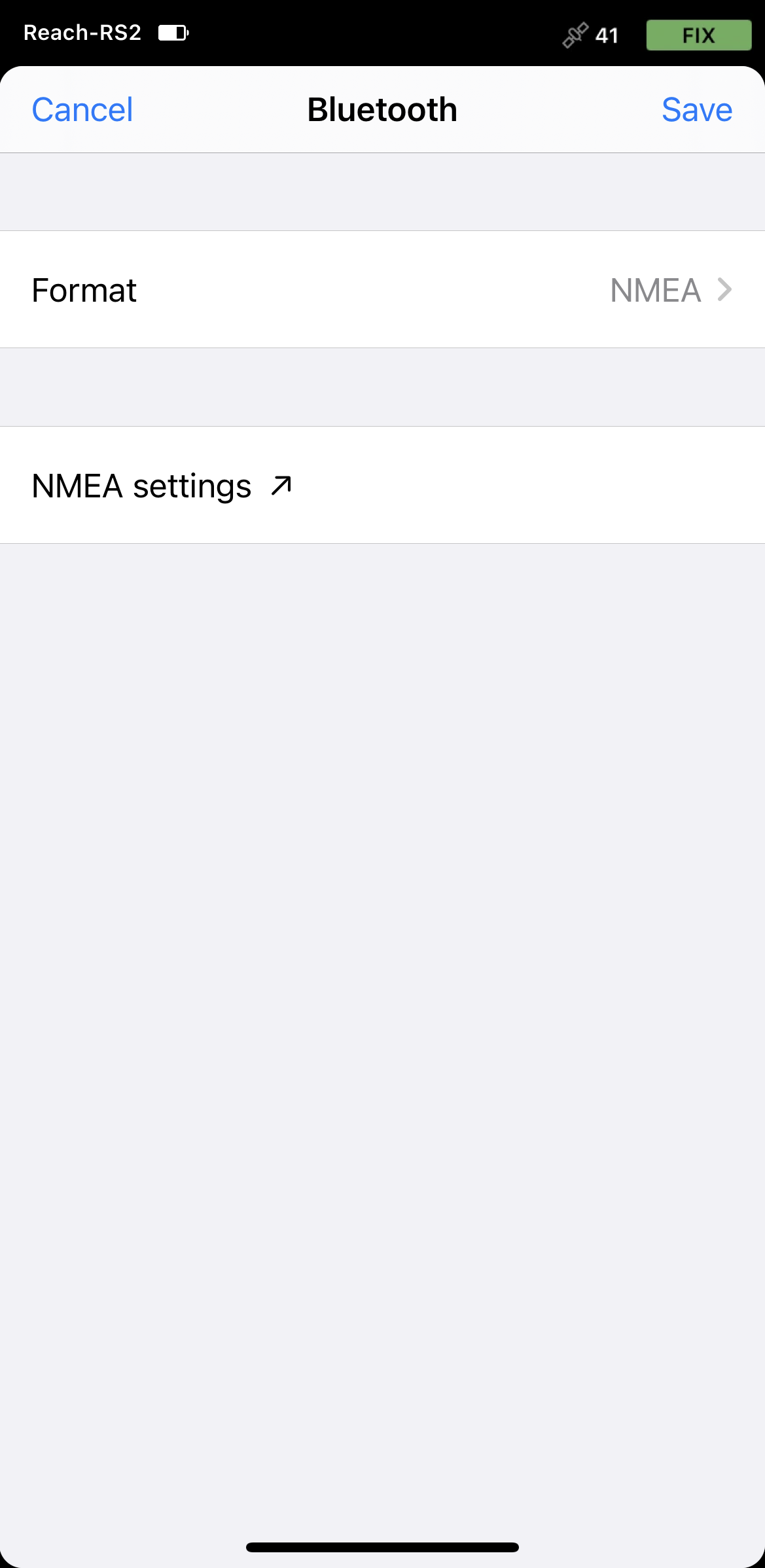
Appuyez sur Format et choisissez NMEA. Enregistrer les modifications.
Activation de la détectabilité de Reach RS2/RS2+
Pour rendre votre Reach RS2/RS2+ détectable via Bluetooth, suivez ces étapes :
-
Connectez-vous à votre Reach RS2/RS2+ en utilisant Emlid Flow.
-
Allez dans Settings (Paramètres) et appuyez sur Bluetooth.
-
Activez Bluetooth en appuyant sur le bouton Turn on Bluetooth (Activer le Bluetooth).
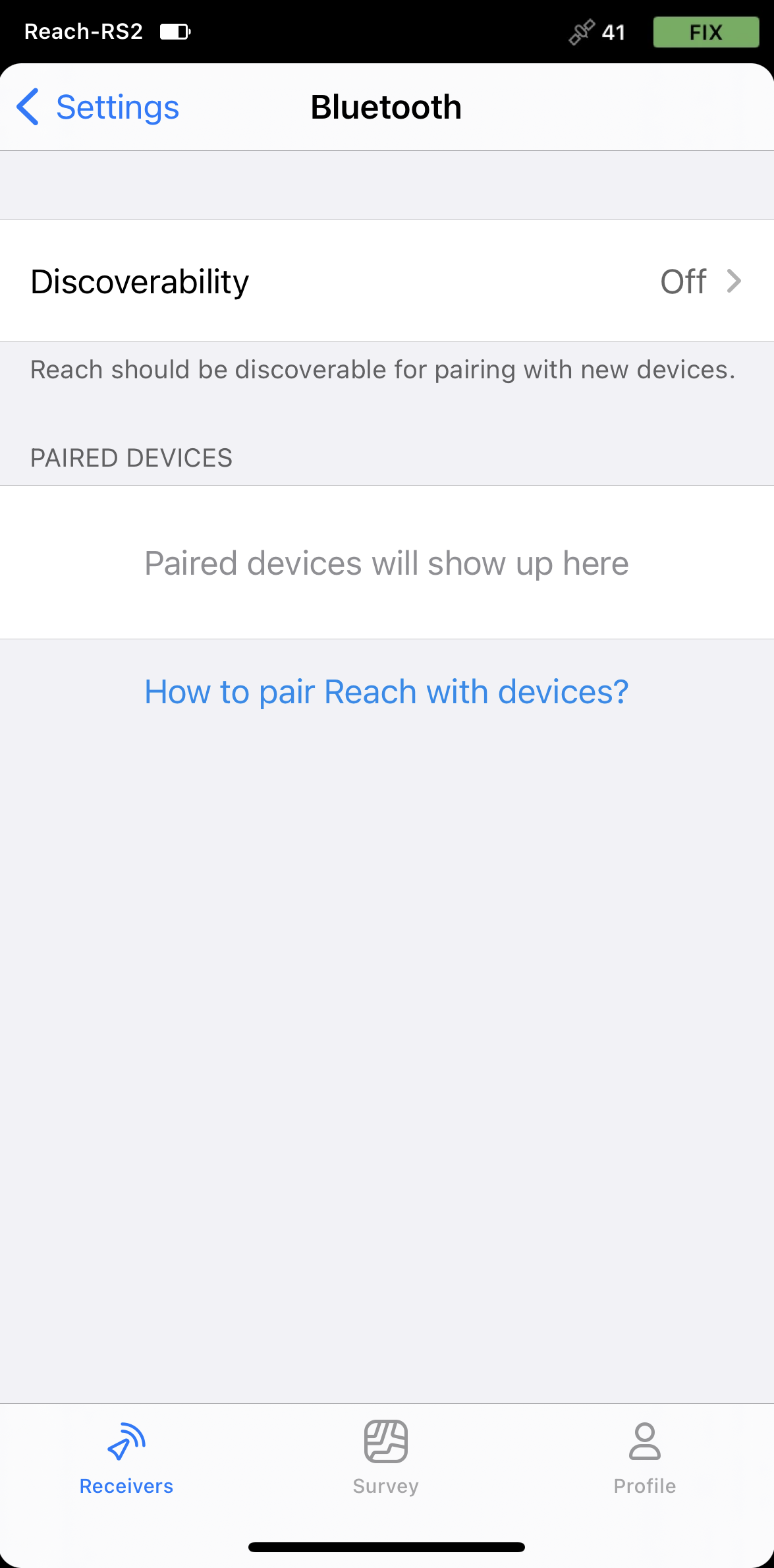
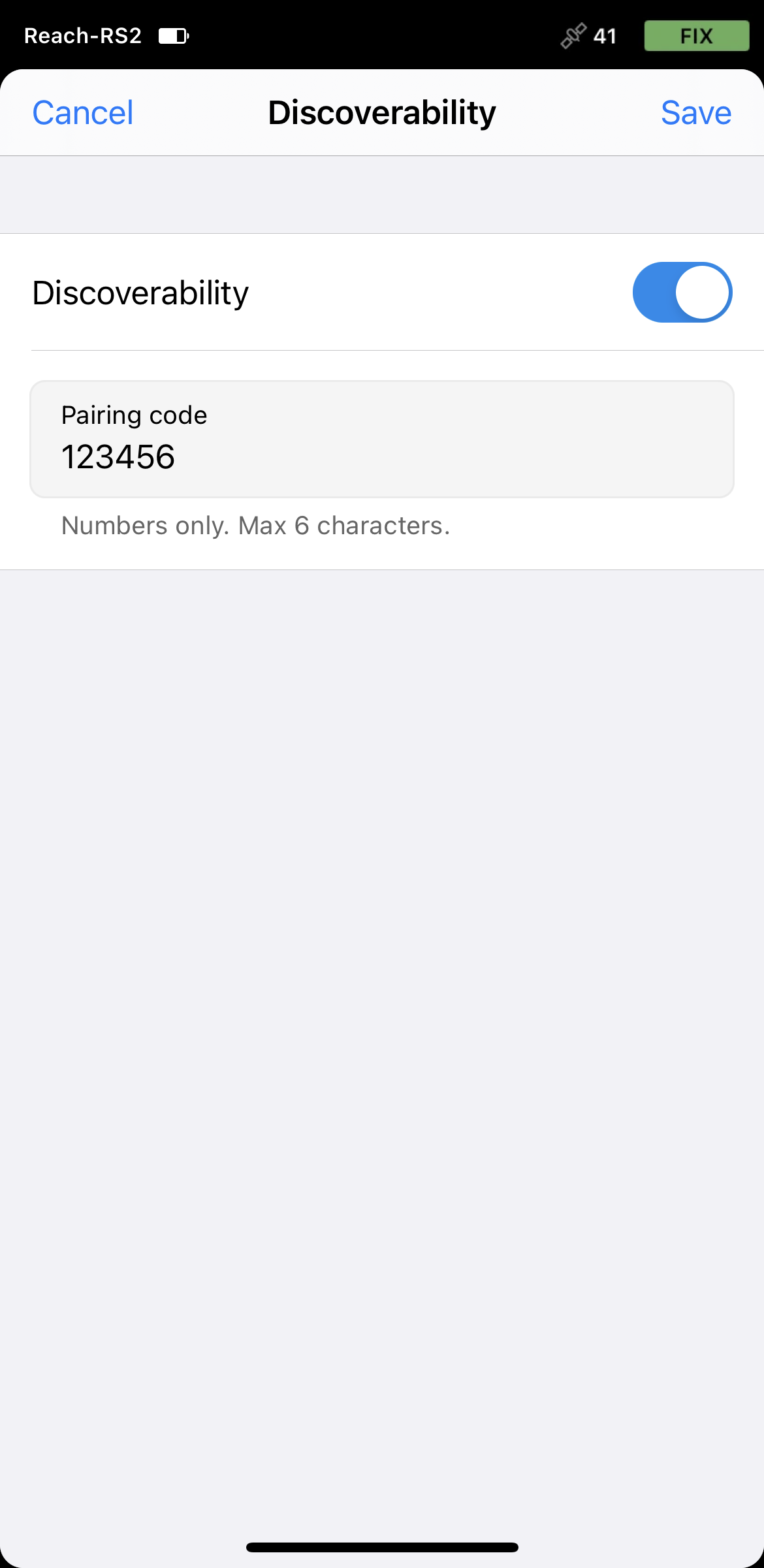
-
Appuyez sur Discoverability (Visibilité) et activez-la. Appuyez sur Save (Enregistrer) pour appliquer les modifications.
Appairage de Reach avec l'appareil Android
Pour appairer votre Reach RS2/RS2+ avec l'appareil Android, procédez comme suit :
-
Accédez à l'écran de configuration Bluetooth de votre appareil Android et activez Bluetooth.
-
Attendez que votre Reach soit listé comme un appareil disponible.
astuceGardez Reach à quelques mètres de l'appareil.
-
Appuyez sur le nom de votre Reach dans la liste des appareils disponibles sur l'appareil Android.
remarqueSi votre appareil nécessite un code PIN, entrez 123456.
-
Appairez Reach avec l'appareil Android.
Configuration de la communication entre Mergin Maps et Reach RX
-
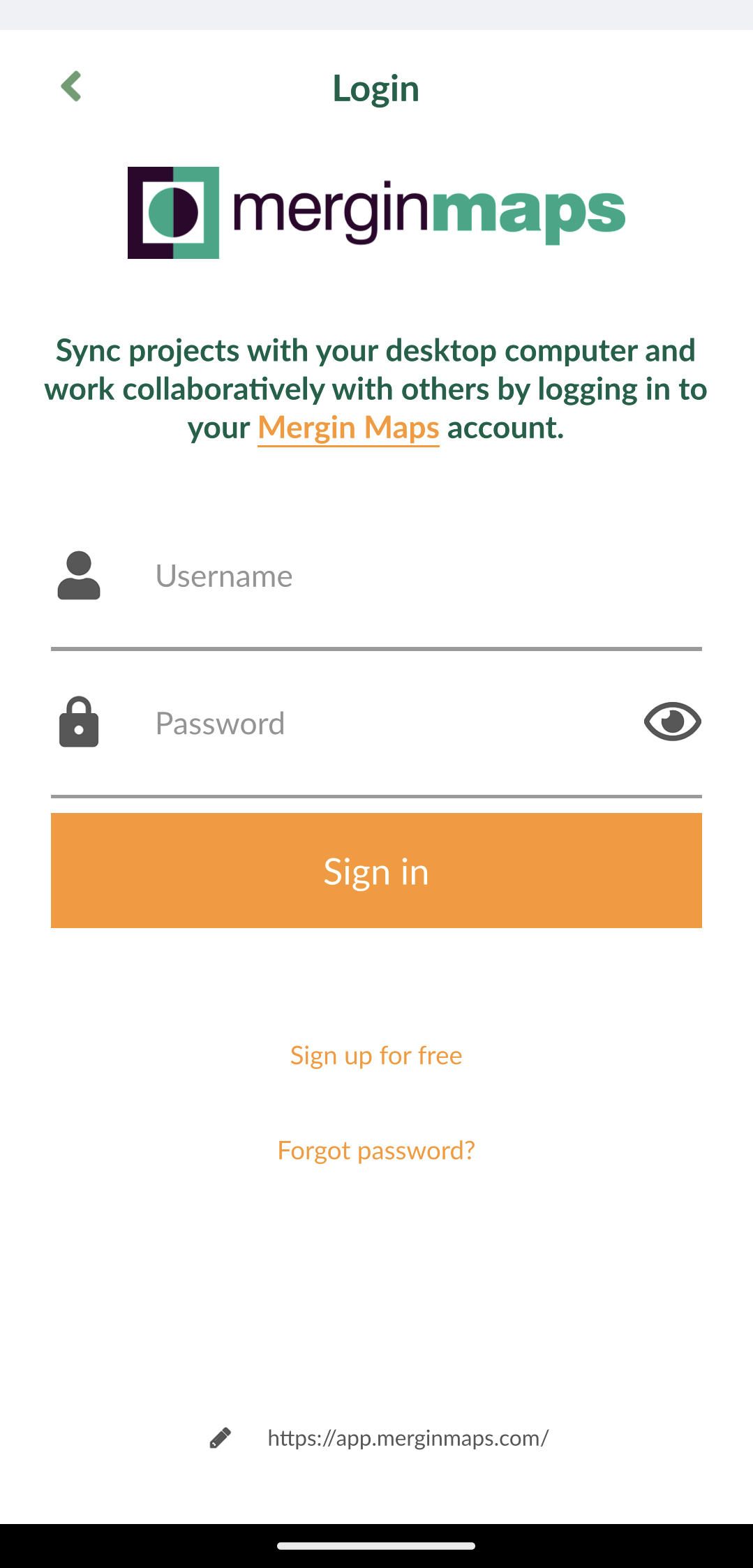
Ouvrez l'application Mergin Maps et créez un compte si vous n'en avez pas encore pour accéder à l'application.
-
Ouvrez ou créez un nouveau projet.
-
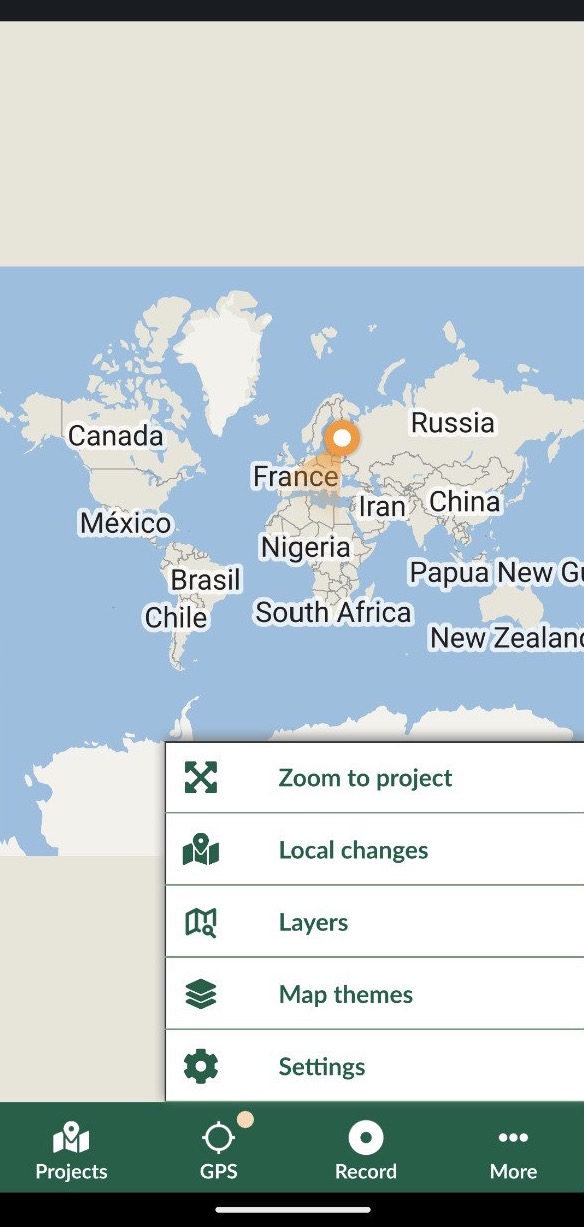
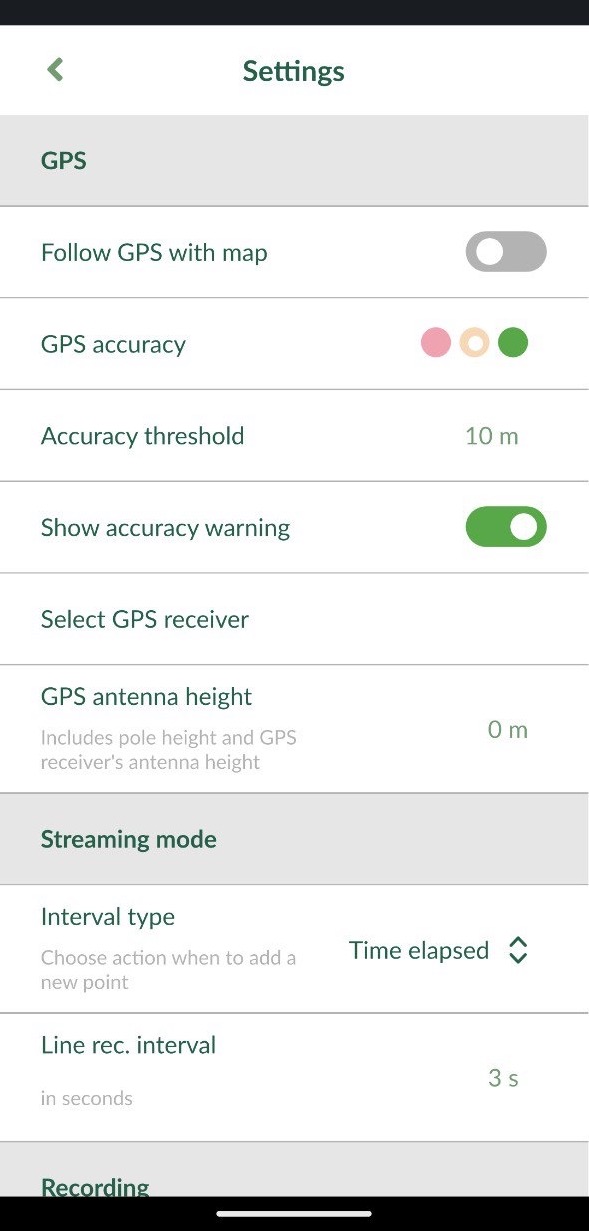
Sur l'écran ouvert dans le coin inférieur droit, appuyez sur More (Plus) et Settings (Paramètres).
-
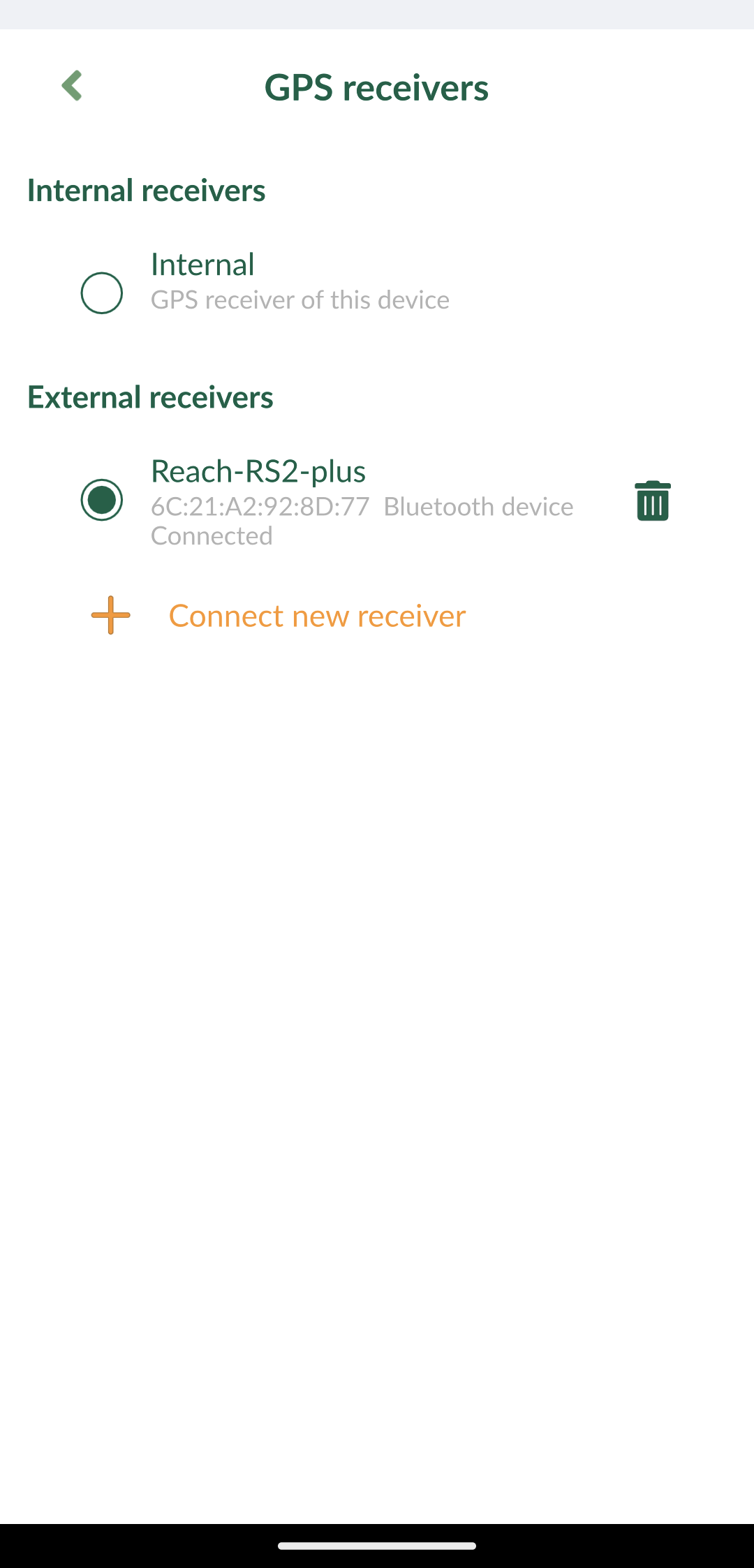
Dans Settings (Paramètres), appuyez sur Select GPS receiver (Sélectionner le récepteur GPS).
-
Appuyez sur Connect new receivers (Connecter de nouveaux récepteurs).

-
Choisissez votre récepteur GPS dans la liste des appareils Bluetooth et attendez qu'il soit connecté.
-
Retournez dans Settings (Paramètres) et réglez la hauteur de l'antenne. Pour Reach RS2/RS2+, la hauteur de l'antenne est la distance du marquage au sol au point central en bas du Reach, point de référence de l'antenne (ARP), plus la hauteur du récepteur au centre de phase de l'antenne (APC), décalage de hauteur de l'antenne. Le décalage de hauteur de l'antenne est égal à 134 mm.
-
Allez dans l'onglet GPS et vérifiez l'état RTK et la précision sur la carte. Pour vérifier les informations GPS détaillées, appuyez de nouveau sur l'onglet.

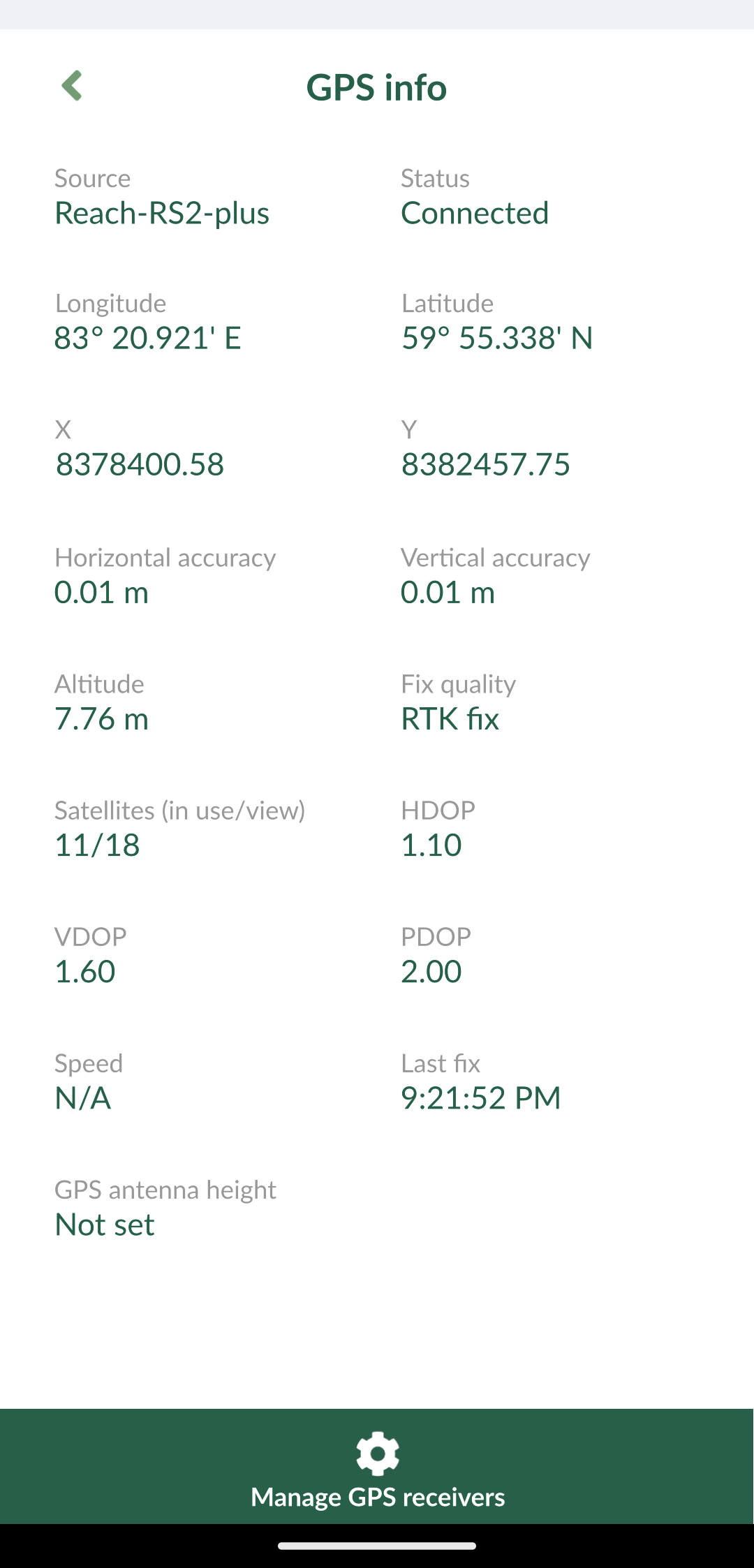
Maintenant, vous êtes prêt à commencer à collecter des données !