Guida PPK senseFly
Panoramica
In questo tutorial sono disponibili le informazioni su come eseguire il PPK con i droni senseFly e Reach RS2/RS2+ nel software eMotion.
Una guida passo-passo è disponibile anche sulla senseFly Knowledge Base.
Preparazione dei dati del Reach RS2/RS2+
In questa parte, viene spiegato come posizionare il Reach RS2/RS2+ per registrare i log per il PPK.
Posizionamento del ricevitore Reach RS2/RS2+
Il video seguente mostra come posizionare la base Reach RS2/RS2+ su un punto noto.
Per scoprire altri modi per posizionare la stazione base locale, consultare la guida Posizionamento della base.
I passaggi generali per il posizionamento del ricevitore base sono descritti di seguito.
-
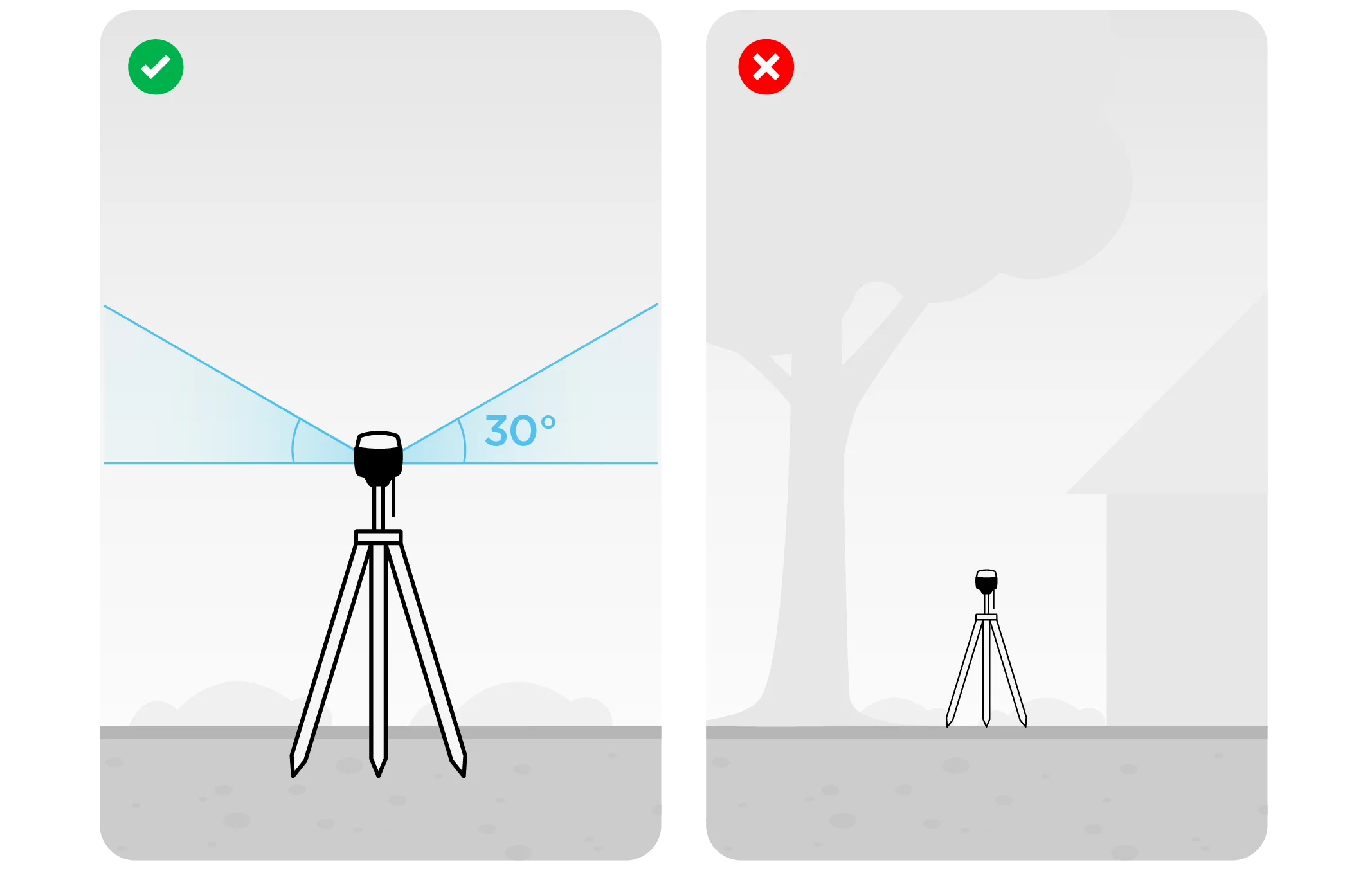
Assicurarsi di scegliere una posizione appropriata per posizionare la stazione base Reach RS2/RS2+. Osservare le 2 immagini sottostanti. L'immagine a sinistra mostra le condizioni desiderabili per la posizione della base. Quella a destra è un esempio di cattive condizioni ambientali, come una vista ridotta del cielo, possibili ostruzioni o vegetazione nelle vicinanze.
-
Assicurarsi che il Reach RS2/RS2+ sia posizionato precisamente sopra il punto marcato sul treppiede e livellato.
-
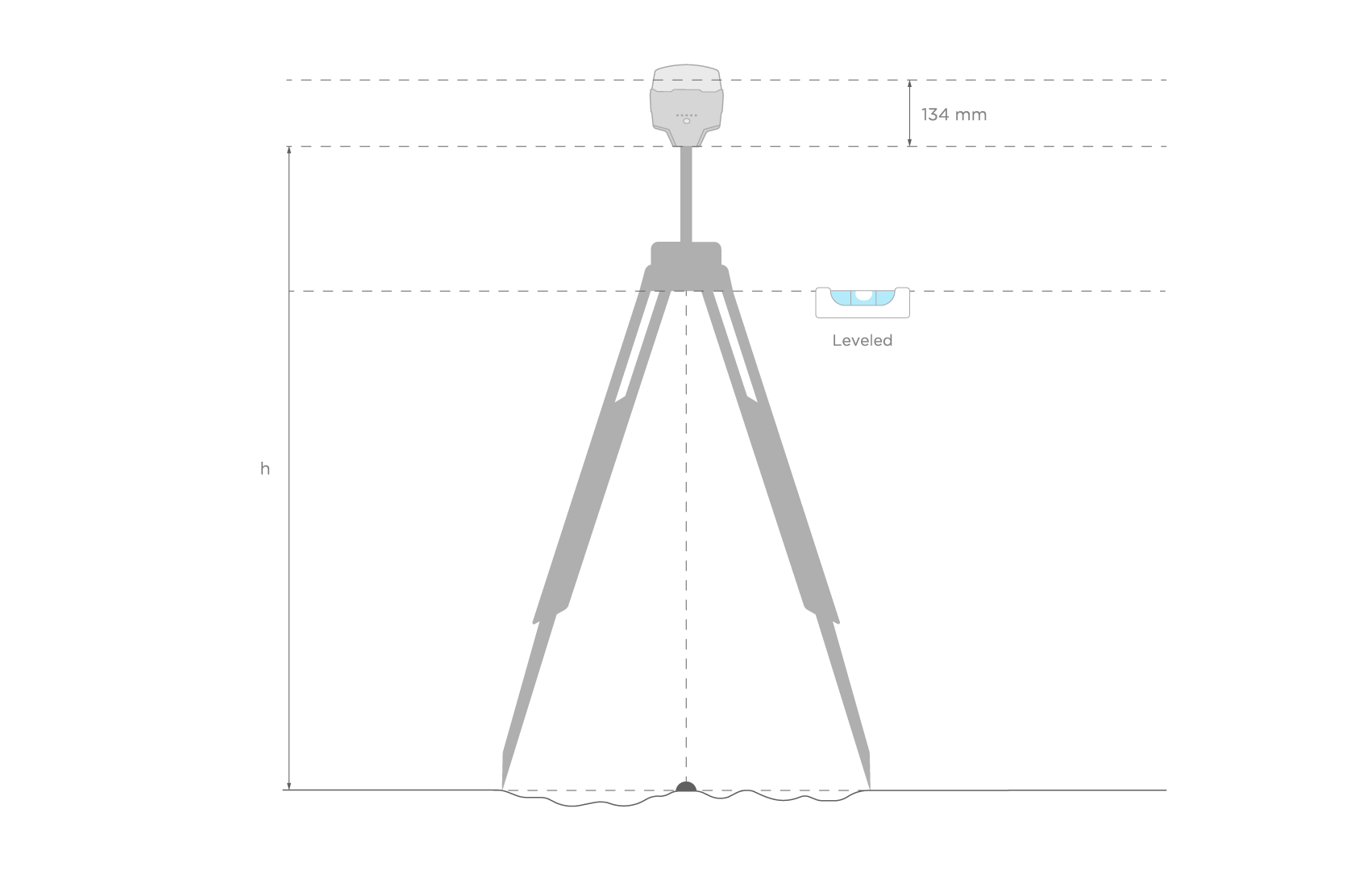
Se si impostano manualmente le coordinate della base, misurare l'offset dell'altezza dell'antenna.
noteL'altezza dell'antenna viene misurata come la distanza tra il contrassegno e il punto di riferimento dell'antenna (ARP).
Per il Reach RS2/RS2+, considerare l'altezza dell'antenna come la distanza tra il contrassegno e la parte inferiore del Reach RS2/RS2+ (h nella figura sottostante) più 134 mm.
noteLe coordinate precise della base saranno necessarie per la post-elaborazione in eMotion.
Registrazione dati grezzi
-
Aprire l'elenco delle reti Wi-Fi sul proprio smartphone/tablet.
-
Connettersi a una rete denominata reach:xx:xx.
-
Inserire la password di rete. La password di Default è emlidreach. Se è stata cambiata in precedenza, inserire invece la password personalizzata.
notePer ripristinare la password Wi-Fi di Default, emlidreach, è necessario eseguire il riflash del ricevitore. Note: il riflash cancella ogni registrazione memorizzata sul ricevitore e ripristina tutte le impostazioni ai loro valori di default.
-
Scegliere Reach RS2/RS2+ dall'elenco dei dispositivi disponibili nell'app Emlid Flow.
-
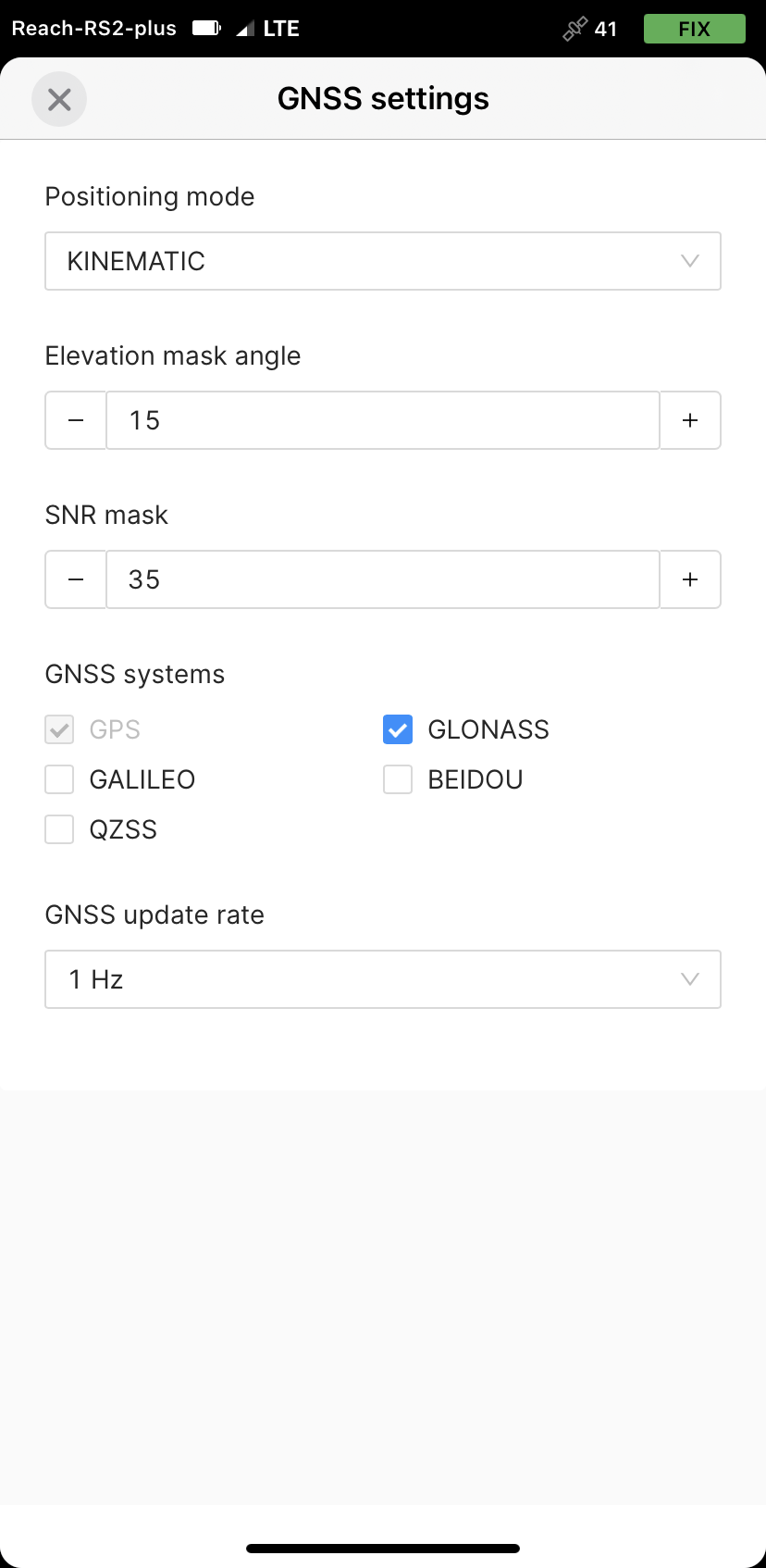
Nella schermata Settings (Impostazioni), toccare GNSS settings (Impostazioni GNSS).
-
Selezionare le costellazioni GNSS come segue.
noteLa nostra raccomandazione predefinita è di avere tutti i GNSS abilitati a 1 Hz.
-
Tornare alla schermata Ricevitori e toccare Registrazione.

-
Toccare il pulsante Recorded logs and settings (Log e impostazioni registrati).
-
Per configurare la registrazione, toccare il pulsante blu a forma di ingranaggio.
-
Nel menu a discesa Format and presets (Formato e preimpostazioni), scegliere UBX. Applicare le modifiche.
Una volta che la base Reach RS2/RS2+ avvia la registrazione dei dati, è possibile far volare il proprio eBee in modalità standalone.
Conversione del log di dati grezzi
-
Scaricare le app RTKLIB QT.
-
Scaricare i file grezzi dal Reach al proprio PC.
-
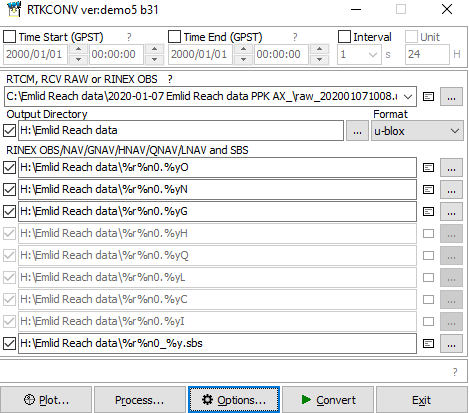
Avviare RTKLIB RTKConv.
-
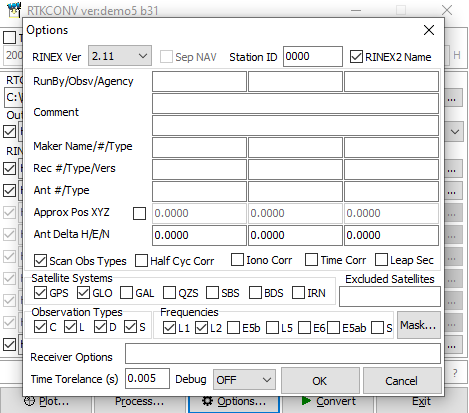
Premere il pulsante Options (Opzioni).
-
Scegliere la RINEX Version (Versione RINEX) 2.11.
-
Attivare i Satellites Systems necessari (Sistemi satellitari).
-
Premere OK.
-
Aggiungere il log grezzo del proprio rover nel primo campo e scegliere la directory di output.
-
Scegliere il formato del proprio log nel menu a comparsa. Impostare il formato su u-blox.
-
Premere Converti.
-
Ora è possibile procedere alla post-elaborazione dei propri log in eMotion3.
Post-elaborazione con eMotion
-
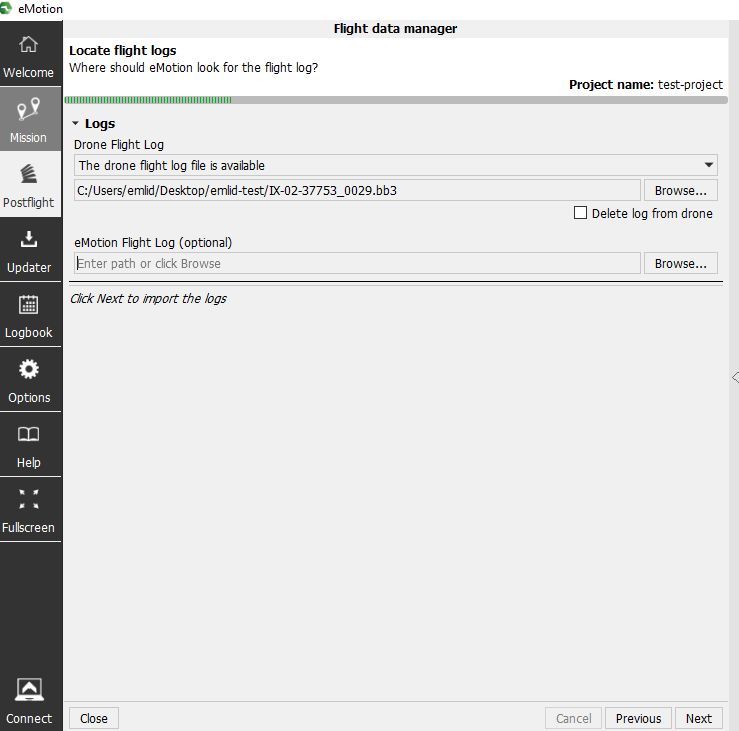
Avviare eMotion3 e selezionare l'FDM (Flight Device Manager) post-volo.
-
Creare un progetto e importare i log di volo. Andare alla scheda del flusso di lavoro RTK/PPK.
-
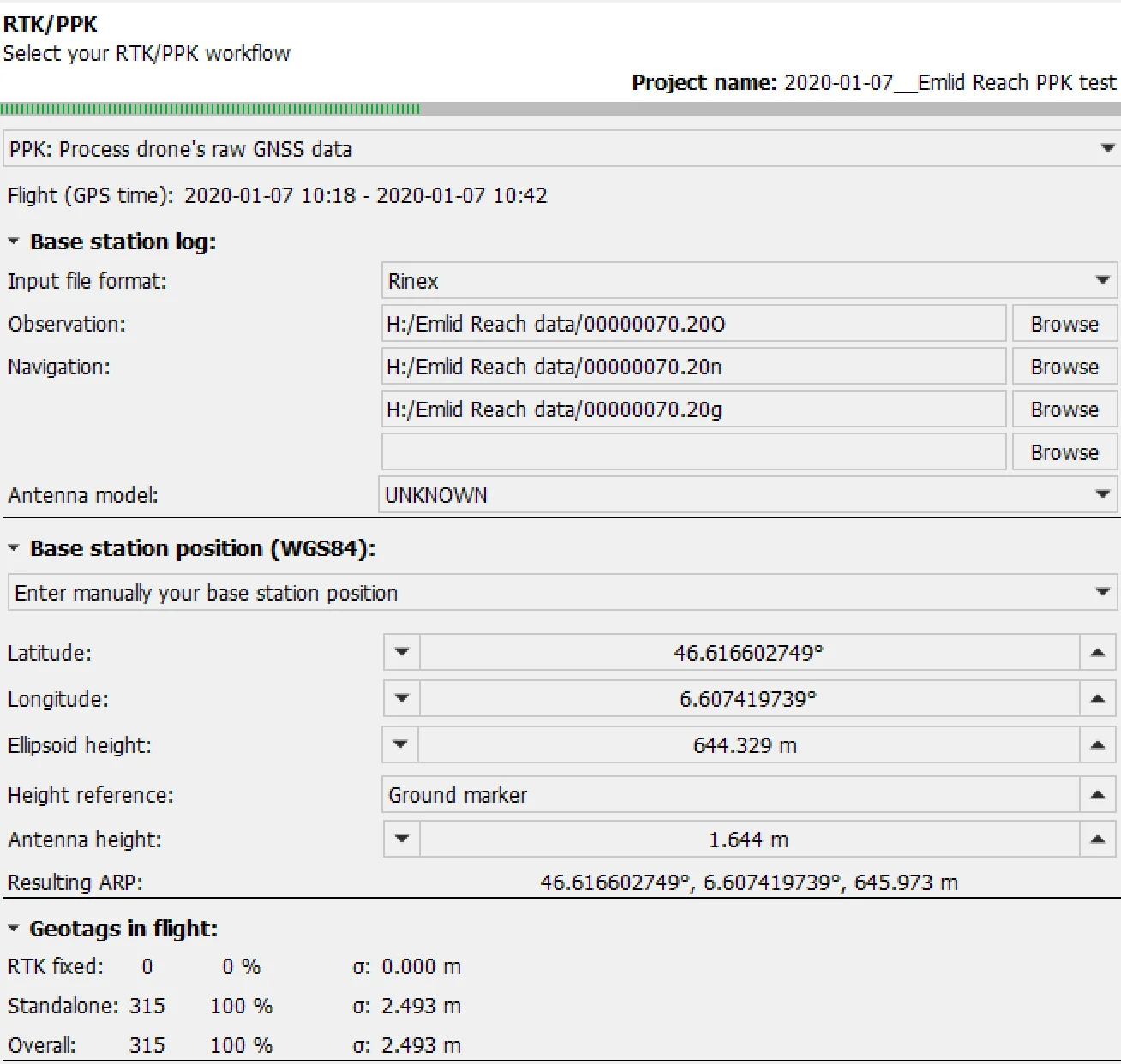
Impostare il formato del file di input su RINEX.
-
Selezionare i file RINEX O, N e G appena convertiti dalla base Reach RS2/RS2+.
-
Impostare il modello di antenna su UNKNOWN.
-
Compilare il campo della posizione della base con le coordinate note del punto a terra marcato (marcatore a terra).
-
Impostare il Riferimento altezza su Marcatore a terra.
-
Inserire l'altezza dell'antenna calcolata secondo la spiegazione in questo passaggio per il ricevitore.
-
Premere Avanti per calcolare la soluzione.
-
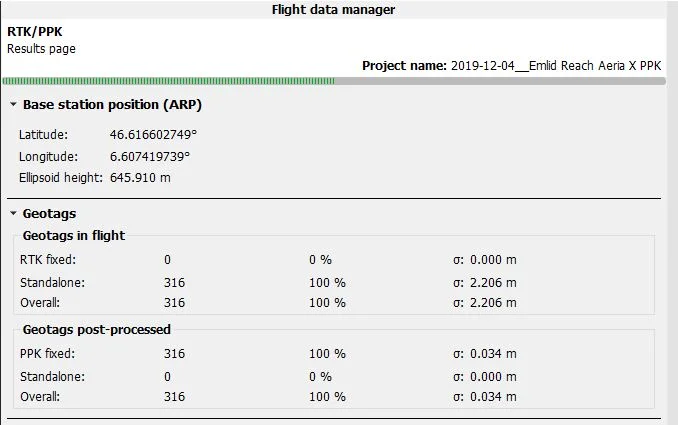
Una volta terminato il calcolo della soluzione, i geotag vengono post-elaborati in base al file RINEX con la posizione della base corretta.
- Procedere con i restanti passaggi FDM per completare il processo di post-volo.
La post-elaborazione dei log dal Reach RS2/RS2+ e dal drone eBee è stata completata con successo.