Guia do senseFly PPK
Visão geral
Neste tutorial, você encontrará as informações sobre como executar o PPK com drones senseFly e Reach RS2/RS2+ no software eMotion.
O guia passo a passo também pode ser encontrado na Base de conhecimento senseFly.
Preparação dos dados do Reach RS2/RS2+
Nesta parte, explicaremos como colocar o Reach RS2/RS2+ para gravar logs para PPK.
Colocação do receptor Reach RS2/RS2+
O vídeo abaixo demonstra como colocar a base do Reach RS2/RS2+ sobre um ponto conhecido.
Para descobrir outras maneiras de posicionar a estação base local, consulte o guia Colocação da base.
Os passos gerais para colocar o receptor de base são descritos abaixo.
-
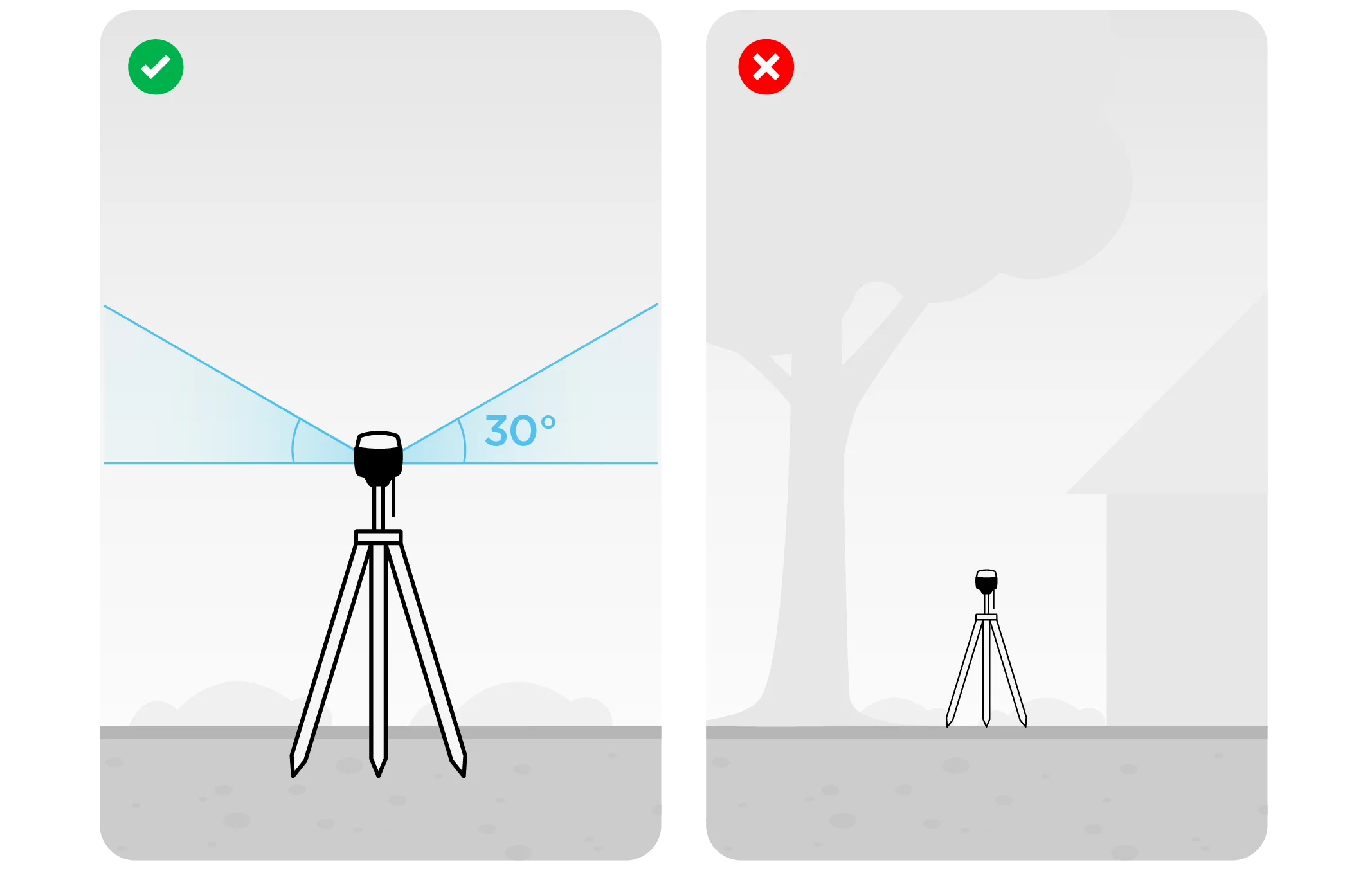
Certifique-se de ter escolhido um local adequado para colocar a estação de base Reach RS2/RS2+. Veja as duas imagens abaixo. A imagem da esquerda demonstra as condições desejáveis para a localização da base. A imagem da direita é um exemplo de más condições ambientais, como a visão reduzida do céu, possíveis obstruções ou vegetação nas proximidades.
-
Certifique-se de que o seu Reach RS2/RS2+ esteja colocado exatamente acima do ponto marcado no tripé e nivelado.
-
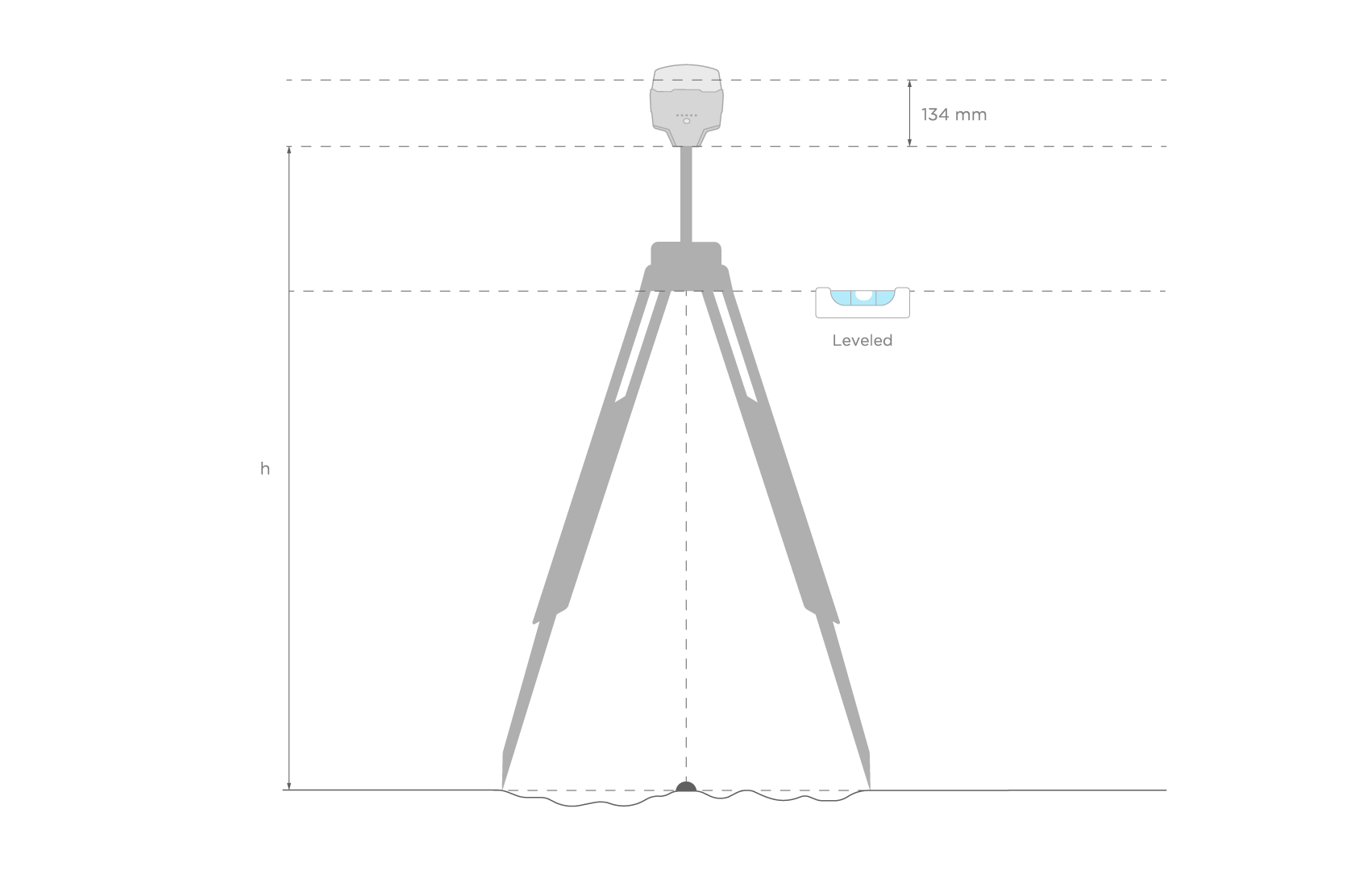
Se estiver configurando manualmente as coordenadas da base, meça o desvio da altura da antena.
noteA altura da antena é medida como a distância entre a marca e o ponto de referência da antena (ARP).
Para o Reach RS2/RS2+, considere a altura da antena como a distância entre a marca e a parte inferior do Reach RS2/RS2+ (h na figura abaixo) mais 134 mm.
noteSerão necessárias coordenadas de base exatas para o pós-processamento no eMotion.
Armazenamento de dados brutos
-
Abra uma lista de redes Wi-Fi no seu smartphone/tablet.
-
Conecte-se a uma rede com o nome reach:xx:xx.
-
Digite a senha da rede. A senha padrão é emlidreach. Se você já tiver alterado anteriormente, digite sua senha personalizada.
notePara restaurar a senha padrão do Wi-Fi, emlidreach, é necessário reprogramar o receptor. Observe que a atualização do firmware apaga todos os registros armazenados no receptor e restaura todas as configurações para seus valores padrão.
-
Selecione Reach RS2/RS2+ na lista de dispositivos disponíveis na aplicação Emlid Flow.
-
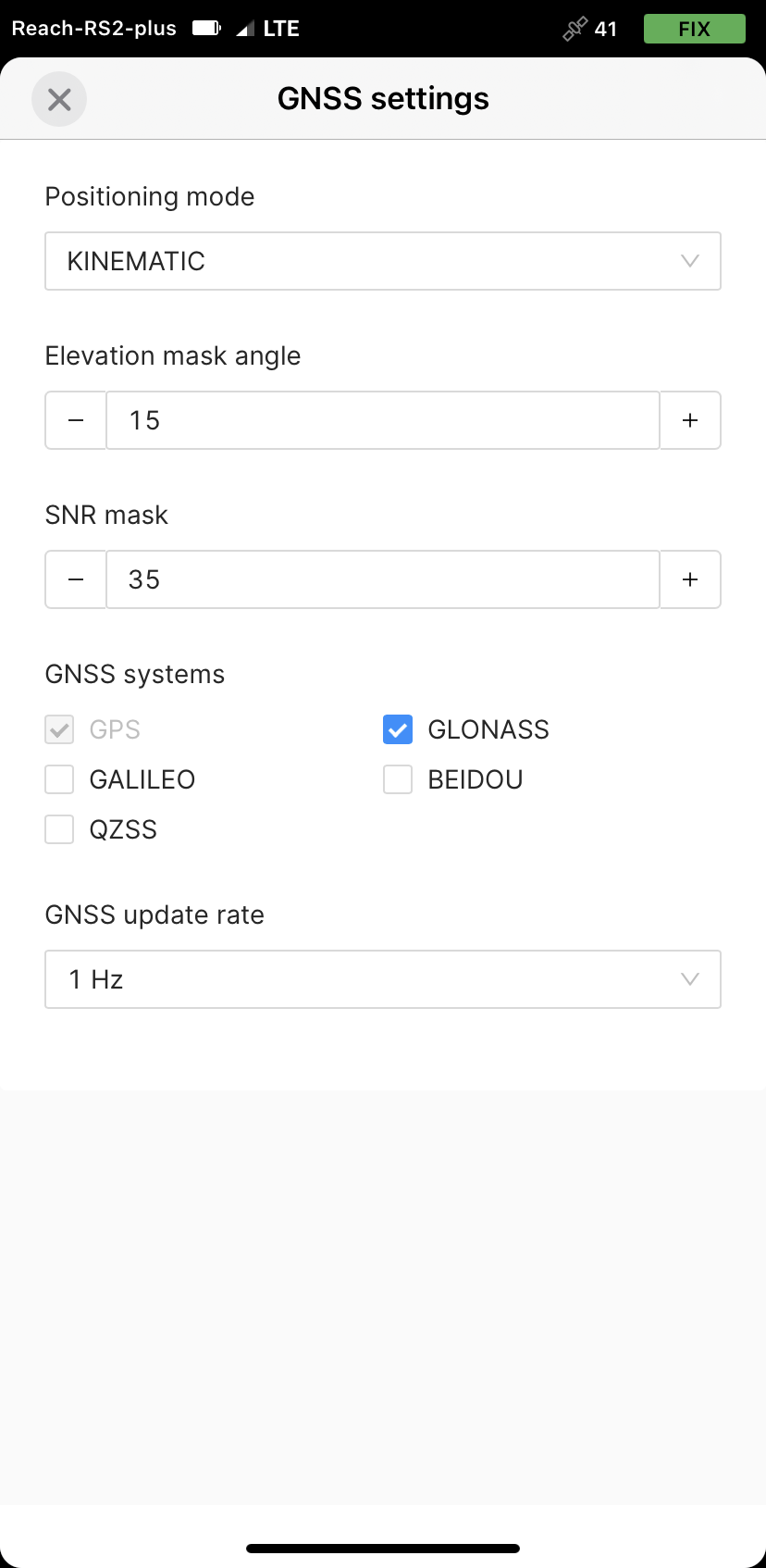
Na tela Configurações (Settings), toque em Configurações GNSS (GNSS settings).
-
Selecione as constelações GNSS da seguinte forma.
noteA nossa recomendação padrão é que todos os GNSS sejam ativados a 1 Hz.
-
Volte à tela Receptores e toque em Armazenamento.

-
Toque no botão Logs e configurações gravados .
-
Para configurar o armazenamento, toque no botão azul de engrenagem.
-
No menu dropdown Formato e predefinições, selecione UBX. Aplicar alterações.
Assim que a base Reach RS2/RS2+ iniciar o armazenamento de dados, você pode pilotar o seu eBee em modo standalone.
Conversão do log de dados brutos
-
Faça download de aplicativos RTKLIB QT.
-
Baixe arquivos brutos do Reach para o seu PC.
-
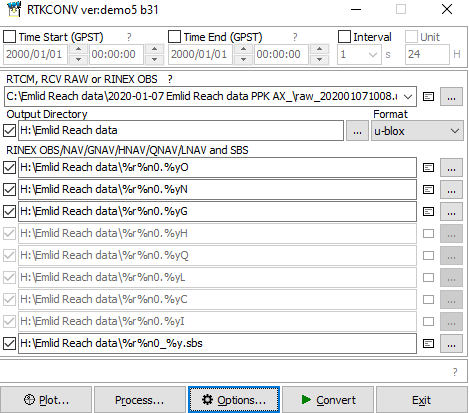
Iniciar o RTKLIB RTKConv.
-
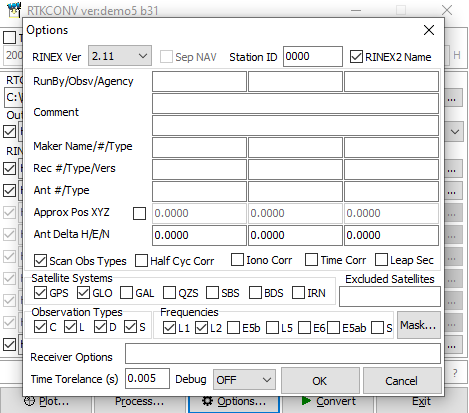
Pressione o botão Opções (Options).
-
Selecione Versão do RINEX (RINEX Version) 2.11.
-
Ative os Sistemas e satélite (Satellites Systems) de que você precisa.
-
Pressione OK.
-
Adicione o log bruto do seu rover no primeiro campo e escolha o diretório de saída.
-
Escolha o formato do seu log no menu pop-down. Definir o formato para u-blox.
-
Pressione Converter (Convert).
-
Agora você pode prosseguir com o pós-processamento de seus logs no eMotion3.
Pós-processamento com o eMotion
-
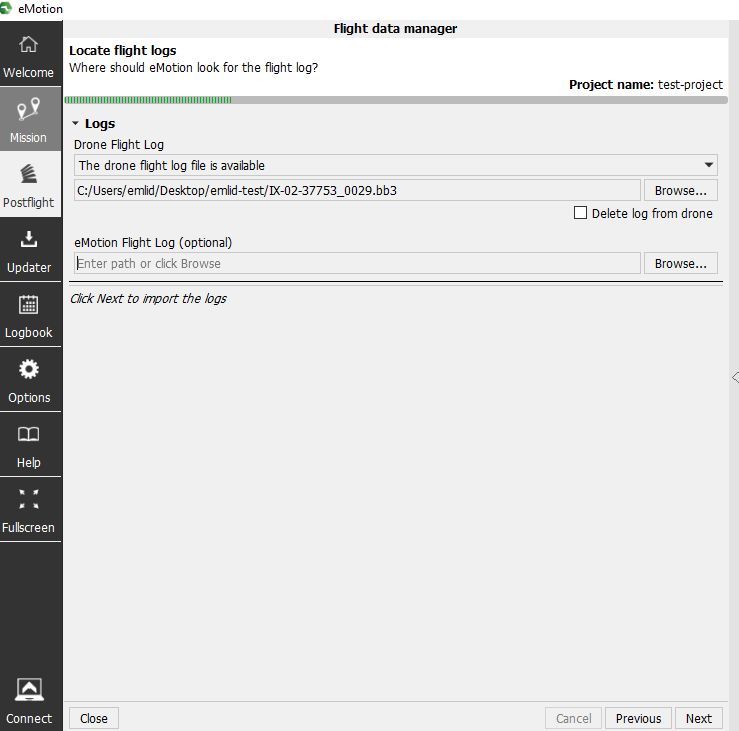
Inicie o eMotion3 e selecione o FDM (Flight Device Manager) pós-voo.
-
Crie um projeto e importe os logs de voo. Siga para a aba do fluxo de trabalho RTK/PPK.
-
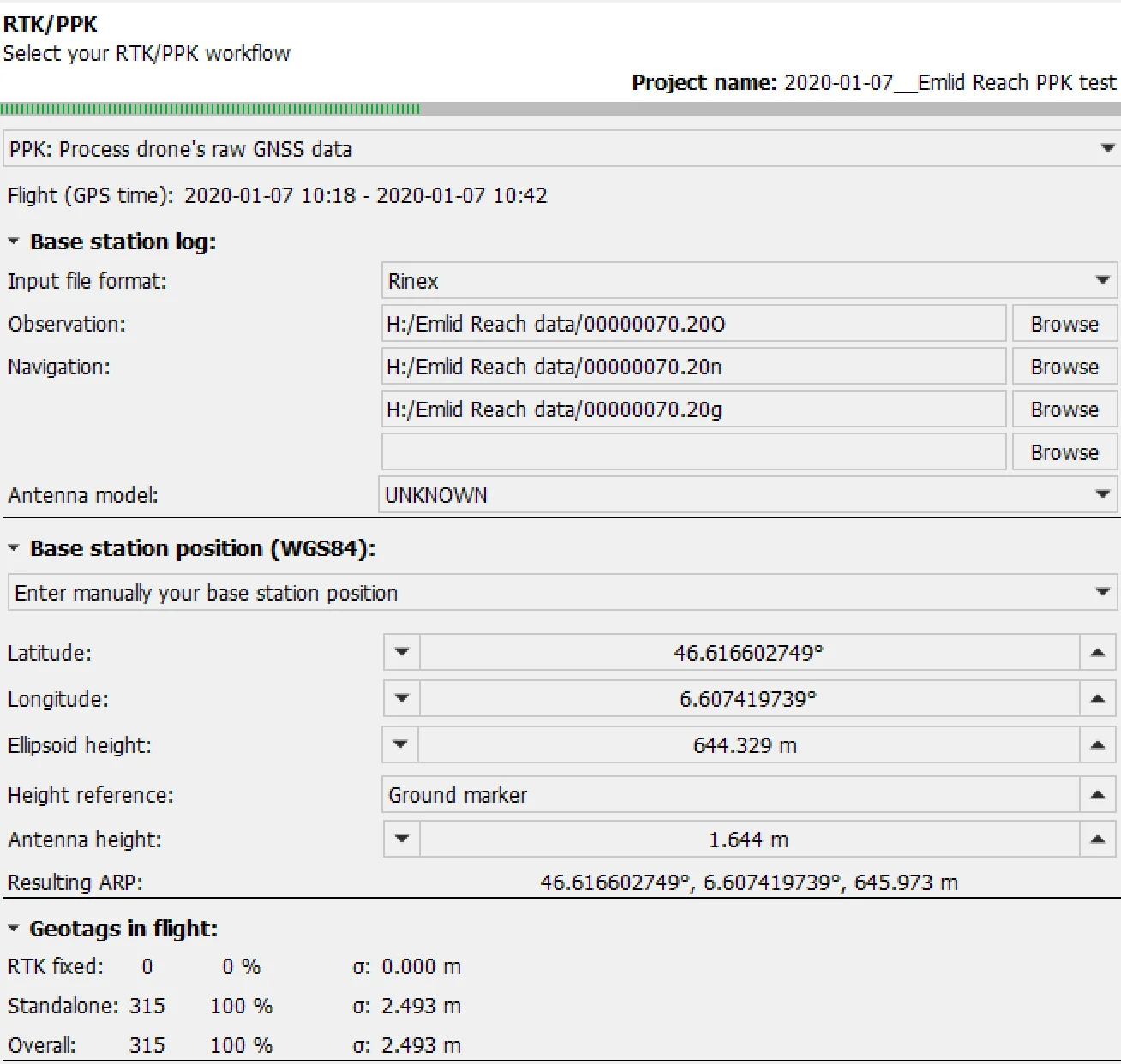
Defina o formato do arquivo de entrada como RINEX.
-
Selecione arquivos RINEX O, N e G recentemente convertidos da base Reach RS2/RS2+.
-
Defina o modelo da antena como UNKNOWN.
-
Preencha o campo da posição de base com as coordenadas conhecidas do ponto do solo marcado (marcador de solo).
-
Defina a Referência de altura (Height Reference) para o marcador do solo (Ground marker).
-
Introduza a altura da antena calculada de acordo com a explicação neste passo para o receptor.
-
Pressione Próximo para calcular a solução.
-
Uma vez terminada a solução calculada, os Geotags são pós-processados com base no arquivo RINEX com a posição de base corrigida.
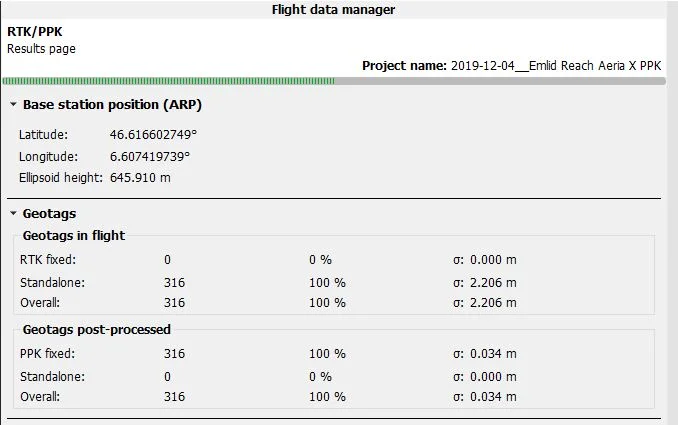
- Prossiga para as etapas que faltam do FDM para concluir o processo Postflight.
Agora você já tem logs pós-processados com sucesso do Reach RS2/RS2+ e do drone eBee.