Trabajar con la base Reach RS2
Esta guía muestra cómo recibir correcciones en Reach RX desde la base Reach RS2+ utilizando Emlid Caster.
Resumen
Asegúrese de que puede proporcionar acceso a Internet a ambos receptores.
Con la ayuda del caster Emlid NTRIP, puede combinar Reach RS2+ como base y el rover Reach RX en una sola configuración y pasar las correcciones de Reach RS2+ a Reach RX a través de Internet.
Obtén más información sobre Emlid Caster.
Flujo de trabajo
Siga los pasos que se indican a continuación para recibir correcciones de la base Reach RS2+ en su Reach RX.
Acceda a las credenciales del NTRIP
En primer lugar, debe obtener sus credenciales NTRIP tanto para la base Reach RS2+ como para el rover Reach RX. Siga los pasos que se indican a continuación:
-
Ve a caster.emlid.com.
-
Regístrese o inicie sesión con su cuenta Emlid.
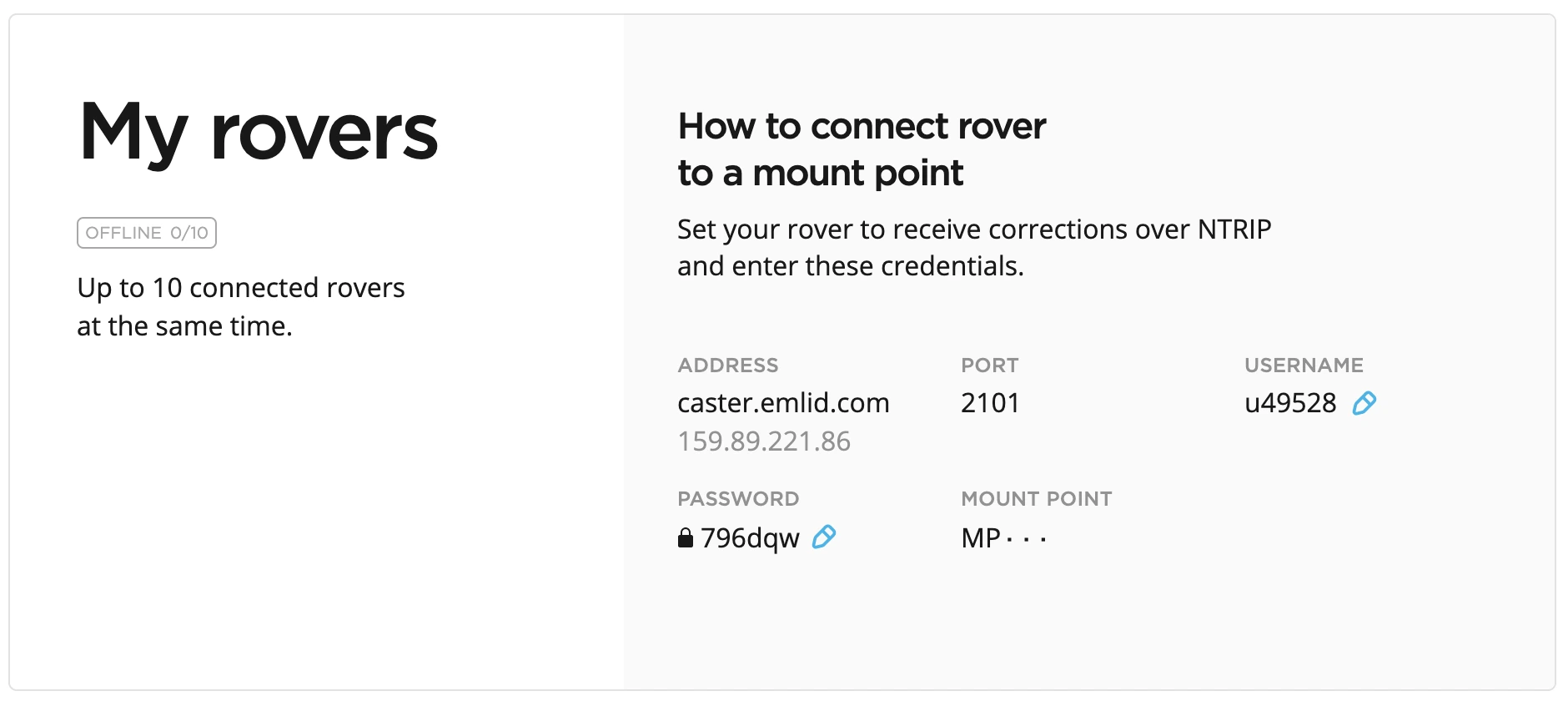
Una vez se registre, accederá a la página con las credenciales NTRIP tanto para la base como para el rover, las cuales se generan automáticamente. A partir de este momento, puede utilizar estas credenciales para conectar su base y rover a un punto de montaje.
Conectar la base a un punto de montaje
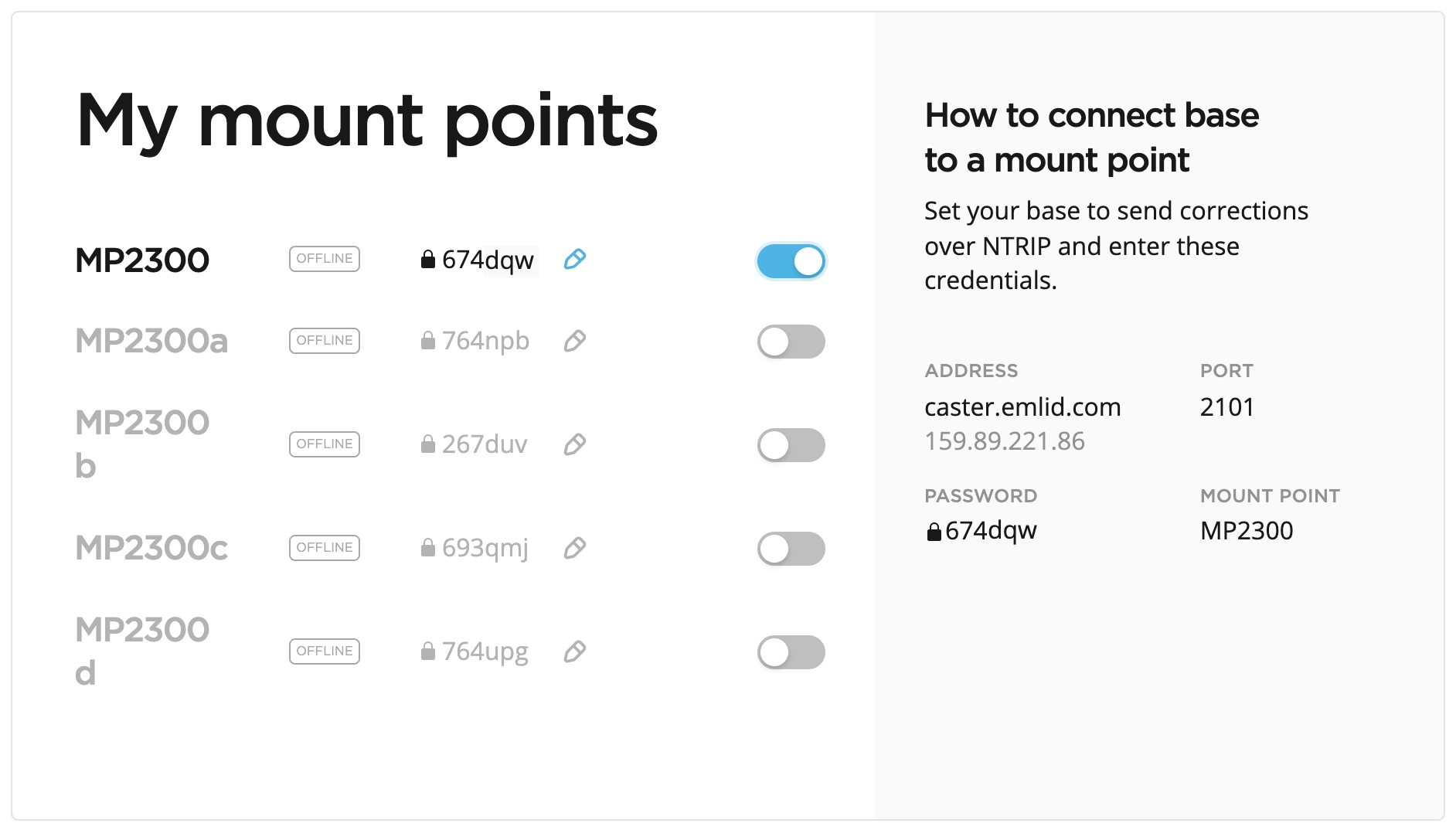
Para conectar su base Reach RS2+ a un punto de montaje, siga los pasos que se indican a continuación:
- Active el punto de montaje que desea utilizar mediante el conmutador.
-
Conéctate a tu base a través de Emlid Flow, ve a Base output (Salida de la base) y configúrala para enviar correcciones a través de NTRIP utilizando las credenciales obtenidas:
- Dirección
- Puerto
- Contraseña
- Punto de montaje
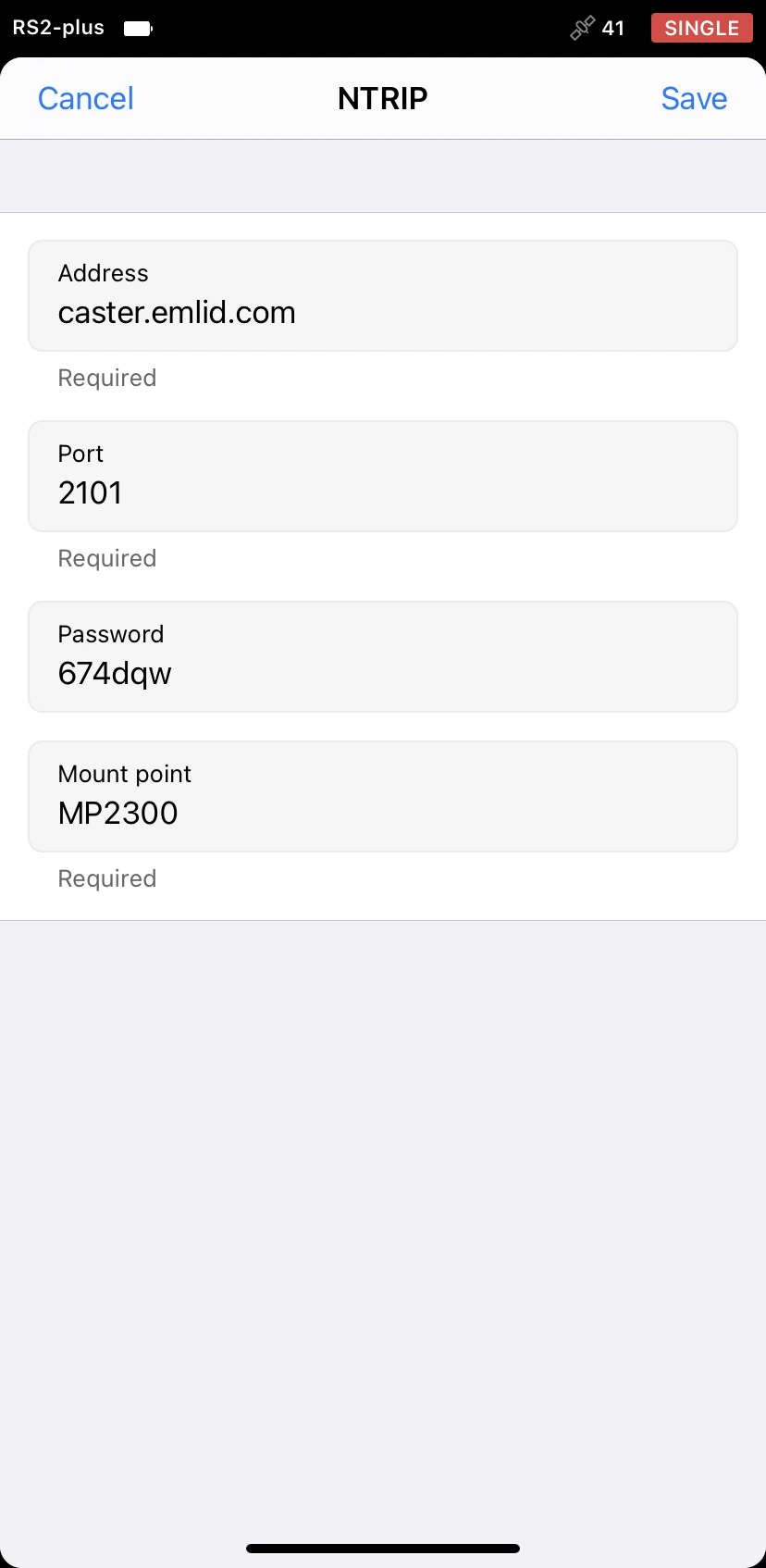
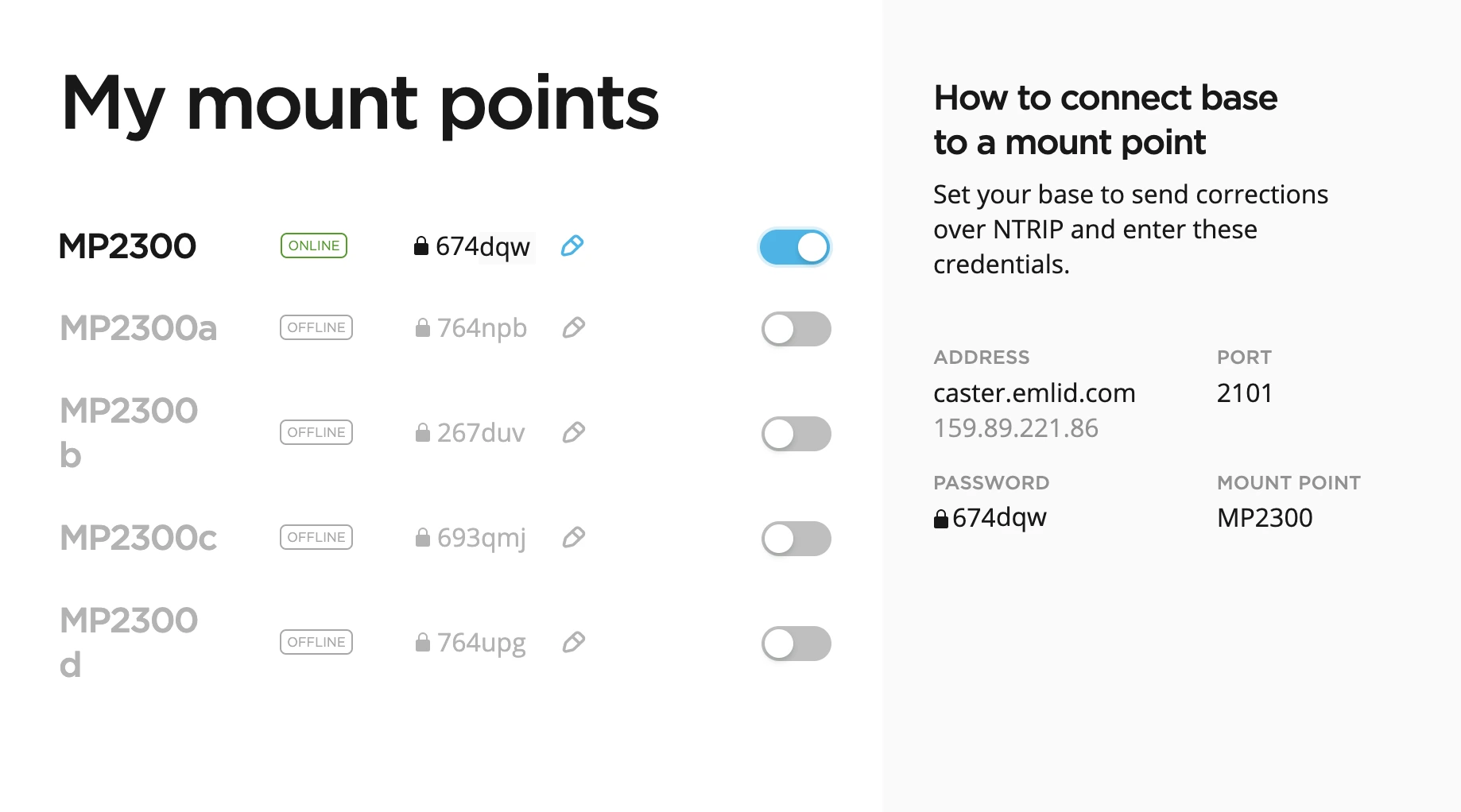
Asegúrese de que ha configurado su base para emitir correcciones a través de NTRIP.
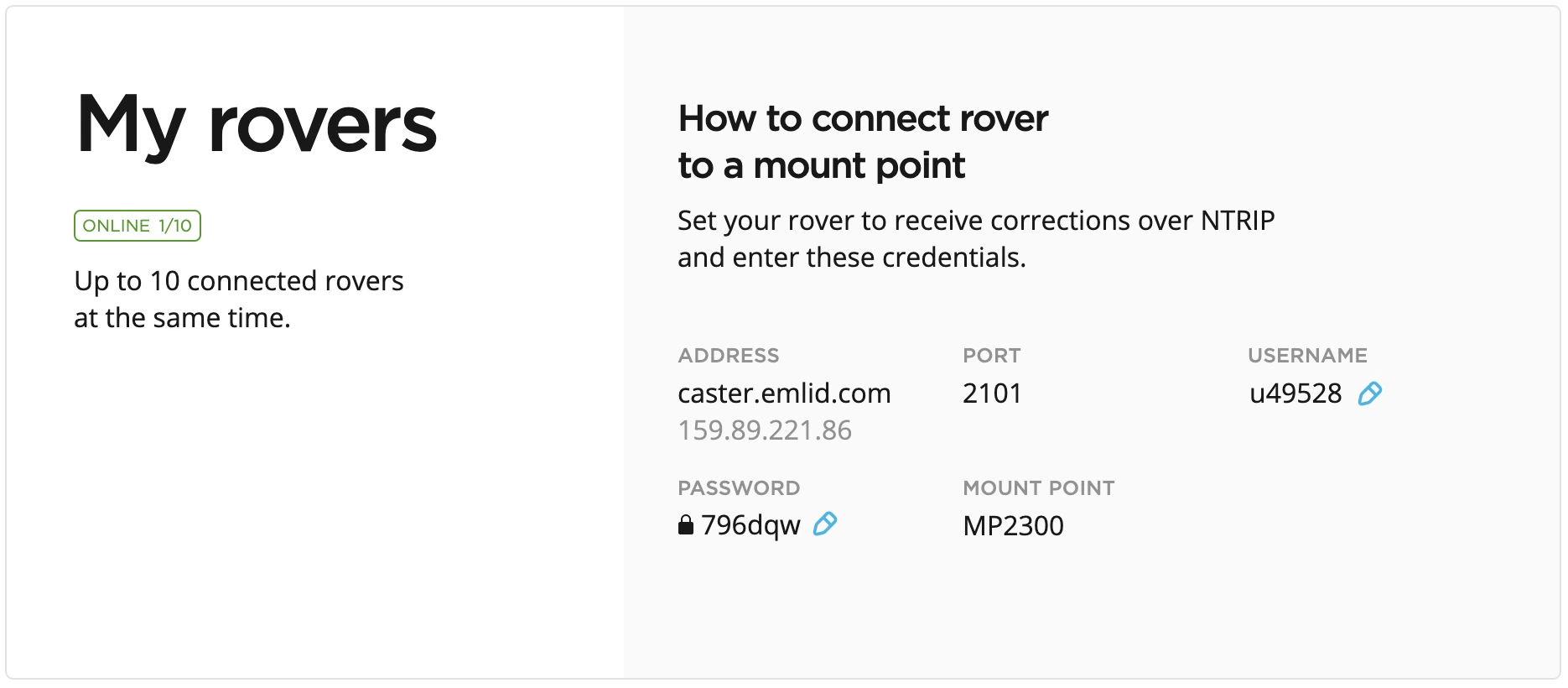
Una vez que haya conectado correctamente su base, verá la notificación EN LÍNEA junto al nombre del punto de montaje.
Conecte su rover a un punto de montaje
Para conectar su rover Reach RX a un punto de montaje, siga los pasos que se indican a continuación:
- Acceda a las credenciales del rover.
Una vez active el punto de montaje para la base, lo verá en las credenciales del rover.
-
Conéctate a tu rover a través de Emlid Flow, ve a Correction input (Entrada de correcciones), y configúralo para obtener correcciones a través de NTRIP utilizando las credenciales obtenidas para el rover:
- Dirección
- Puerto
- Nombre de usuario
- Contraseña
- Punto de montaje
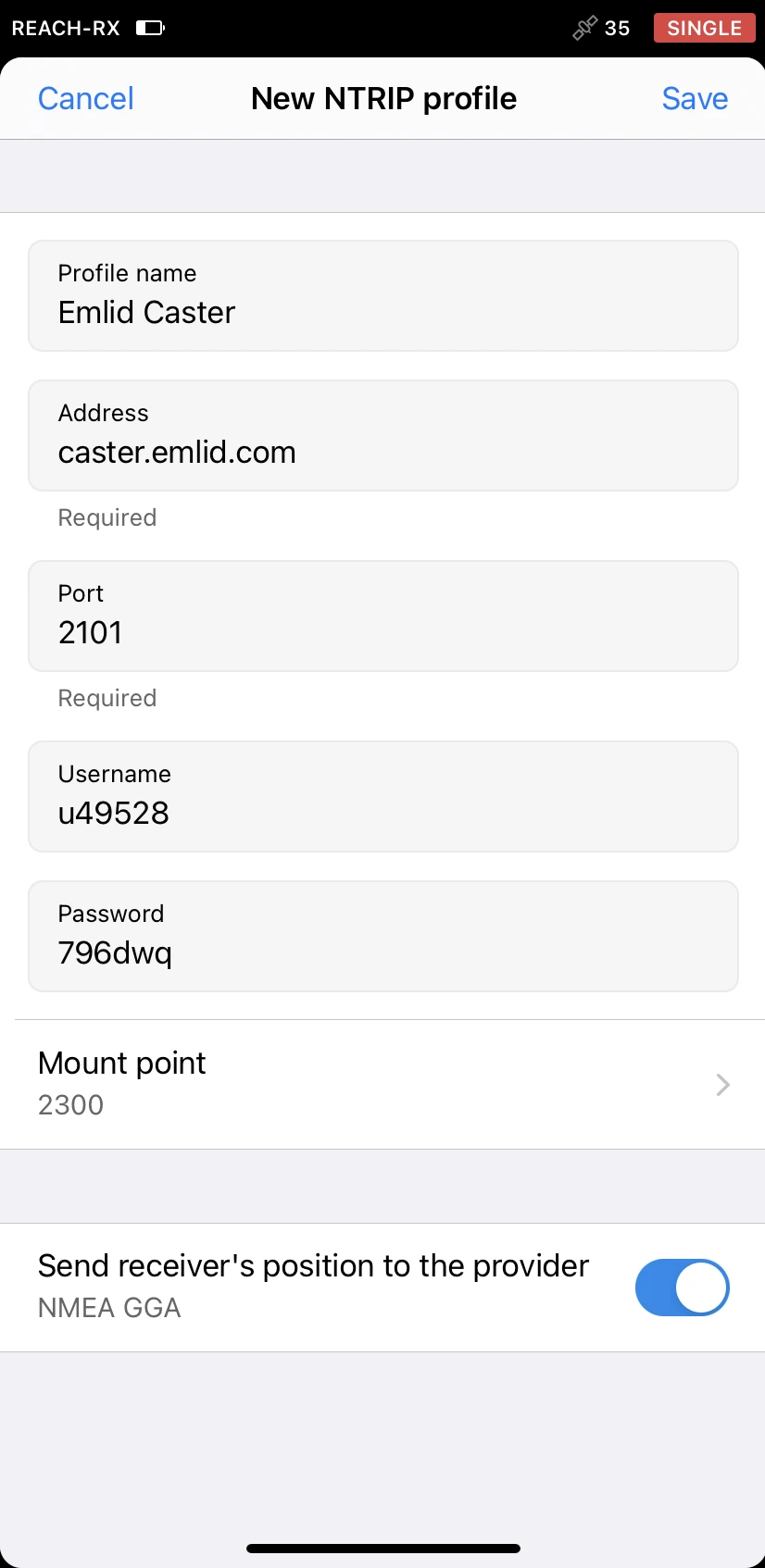
Asegúrese de haber configurado su rover para recibir correcciones de la base a través de NTRIP.
Si quiere añadir más rovers, repita los pasos anteriores.
Cuando hayas conectado correctamente tu rover, verás la notificación ONLINE (EN LÍNEA) y el número de rovers conectados en la sección My rovers (Mis rovers).
Para garantizar el éxito de la transmisión de las correcciones, compruebe dos veces las credenciales que ha introducido tanto en la base como en el rover.
Una vez configurados y conectados tanto la base como el rover al punto de montaje, ya está todo listo para el levantamiento.
Colocación
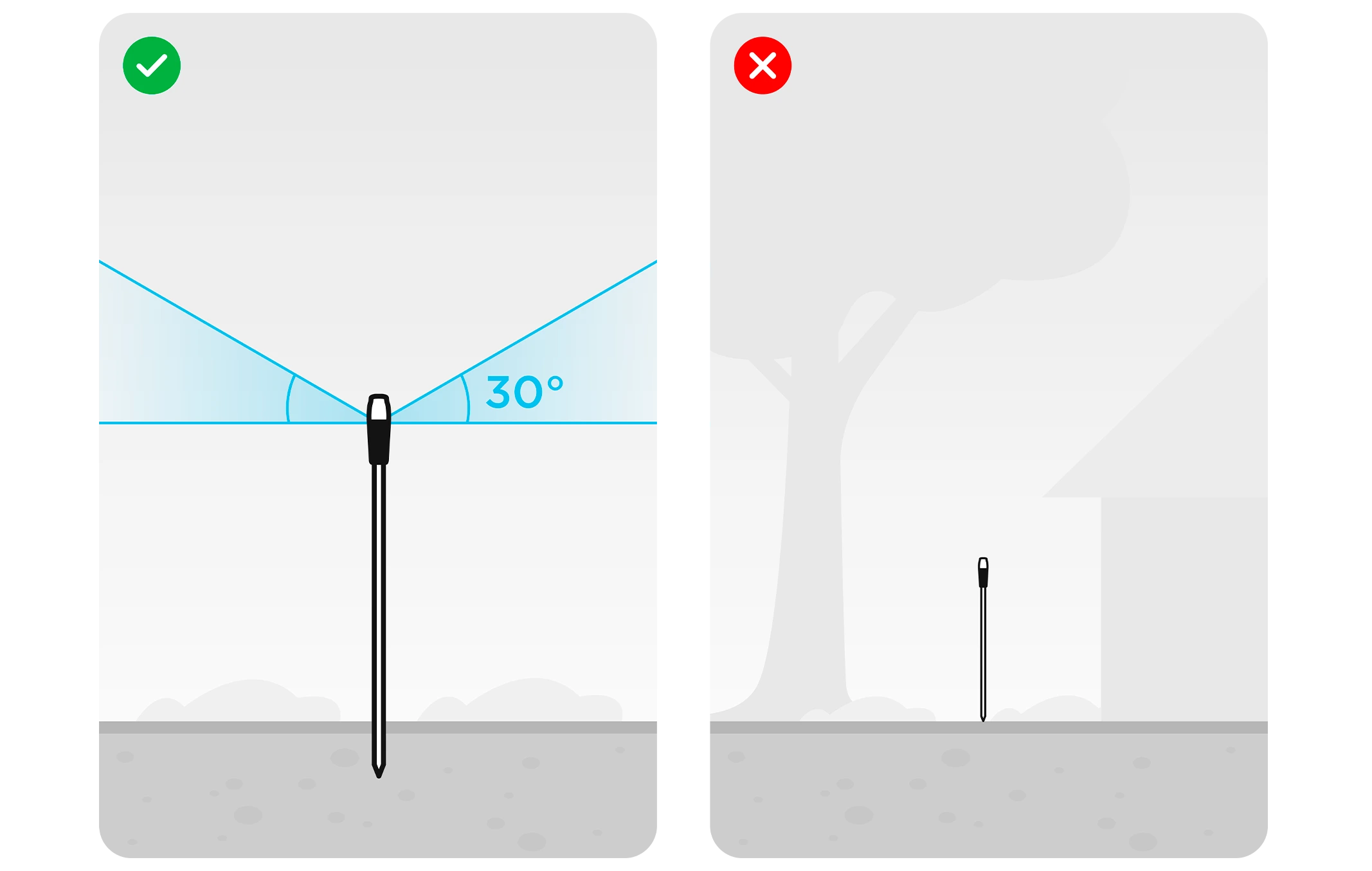
Colocación del rover Reach RX
Antes de realizar el levantamiento, asegúrese de que su Reach tiene una vista despejada del cielo de al menos 30 grados sobre el horizonte. No debe haber obstáculos que puedan bloquear la vista, como edificios, árboles, coches, personas, ordenadores portátiles, etc.
Colocación de la base Reach RS2
Para colocar correctamente su base Reach RS2+, consulte estas guías:
Ver resultados
Cuando haya completado la configuración RTK, puede ver el estado actual de la solución en la esquina superior derecha de la aplicación Emlid Flow o verlo en el LED de estado en su Reach RX:
SINGLE significa que Reach ha encontrado una solución basada únicamente en las señales de satélite. En este caso, la precisión suele ser de nivel métrico.

FLOAT significa que Reach recibe correcciones de la estación base, pero necesita más tiempo para calcular la solución. En este caso, la precisión suele ser submétrica.

FIX significa que Reach, utilizando las correcciones de base, ha calculado una solución con una precisión centimétrica.
Reach RX consigue una solución fija en poco tiempo. En buenos entornos, tardará unos segundos. En condiciones difíciles, puede tardar un poco más. Una vez que el rover obtiene FIX, ya está todo listo para el levantamiento.
También puedes consultar el estado actual de la solución, así como su posición en tiempo real, en la pantalla Status (Estado).