Recolectar puntos
Esta guía muestra cómo recolectar puntos para guardar sus posiciones en un proyecto con Emlid Flow.
Resumen
El recolector es una herramienta de levantamiento de Emlid Flow que permite realizar una recogida de puntos basada en proyectos. Con la herramienta Recolector, puedes colocar los GCP in situ, realizar mediciones de los límites del emplazamiento o guardar las posiciones de los puntos en un proyecto para utilizar los datos posteriormente en un software SIG.
Recolectar puntos
- Emlid Flow
Para recolectar un punto con Emlid Flow, siga los pasos que se indican a continuación:
-
Abra Emlid Flow y conéctese a su Reach.
-
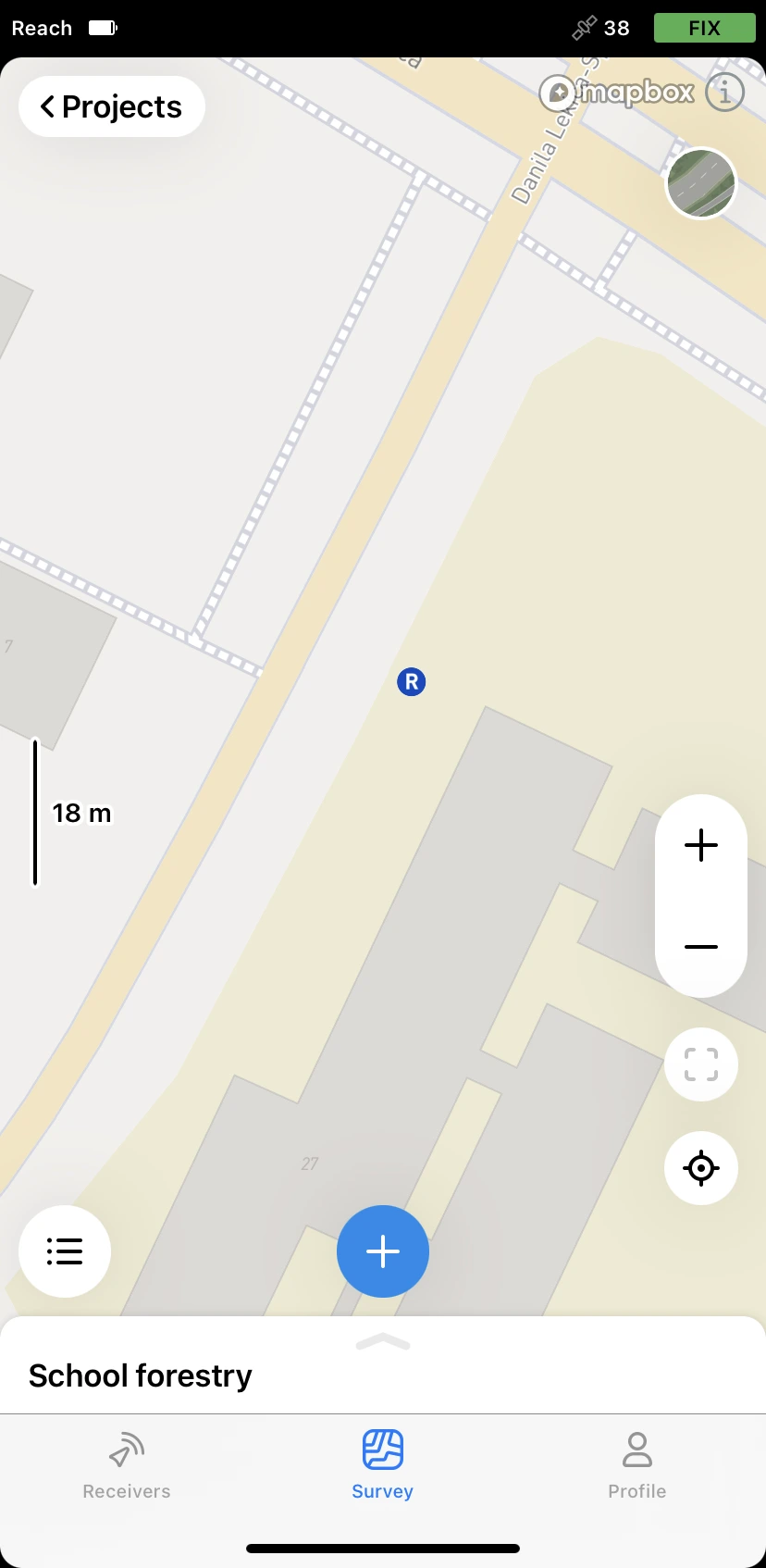
Vaya a la pestaña Levantamiento y abra o cree un proyecto.
tipPara saber cómo crear un proyecto, consulta la guía Crear o importar proyecto.
-
Pulse el botón Más para abrir el menú Recolector.
-
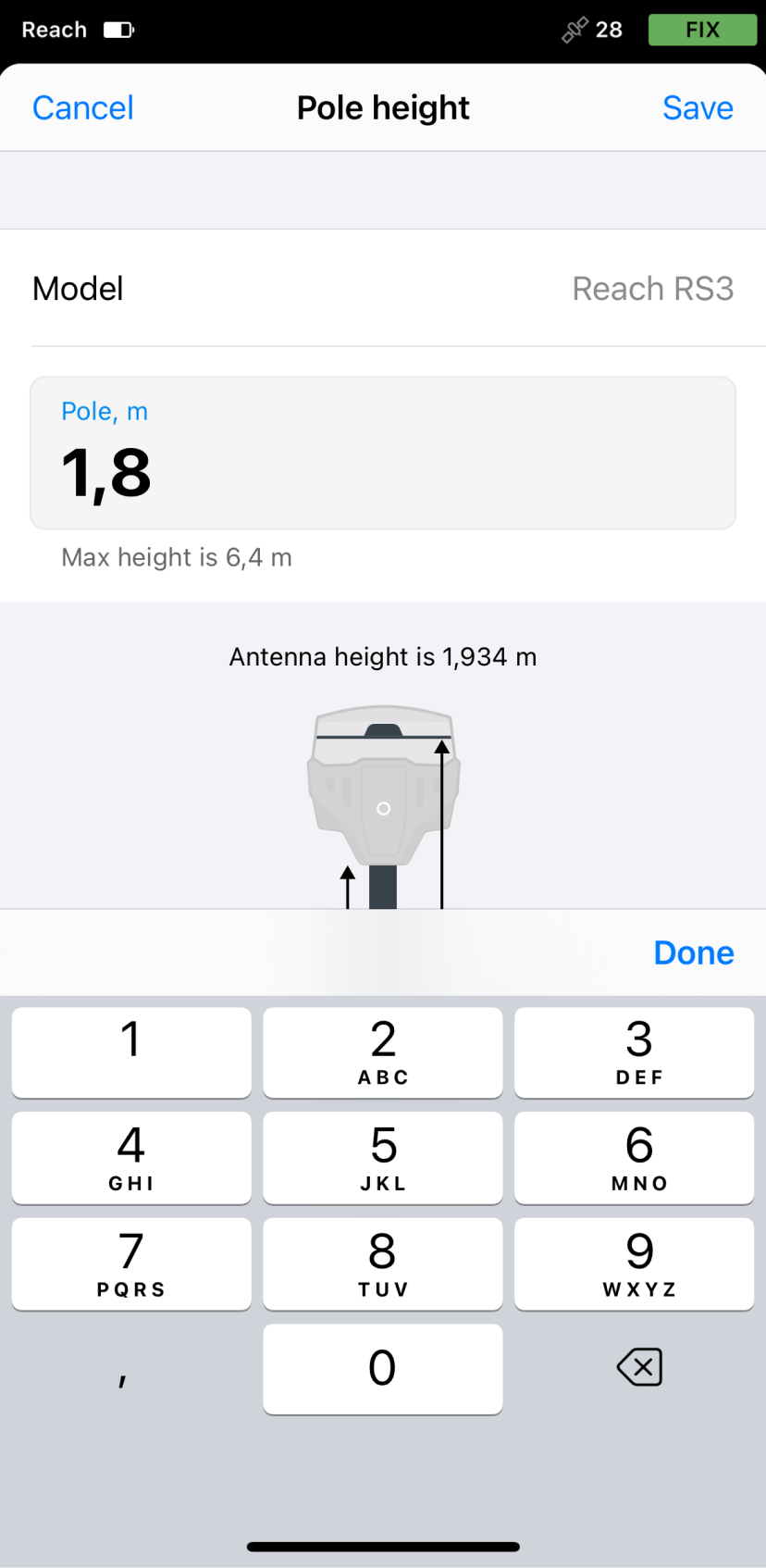
Ajusta la altura del bastón. Este parámetro está fijado en 1,8 m de forma predeterminada.
-
note
Este paso es opcional.
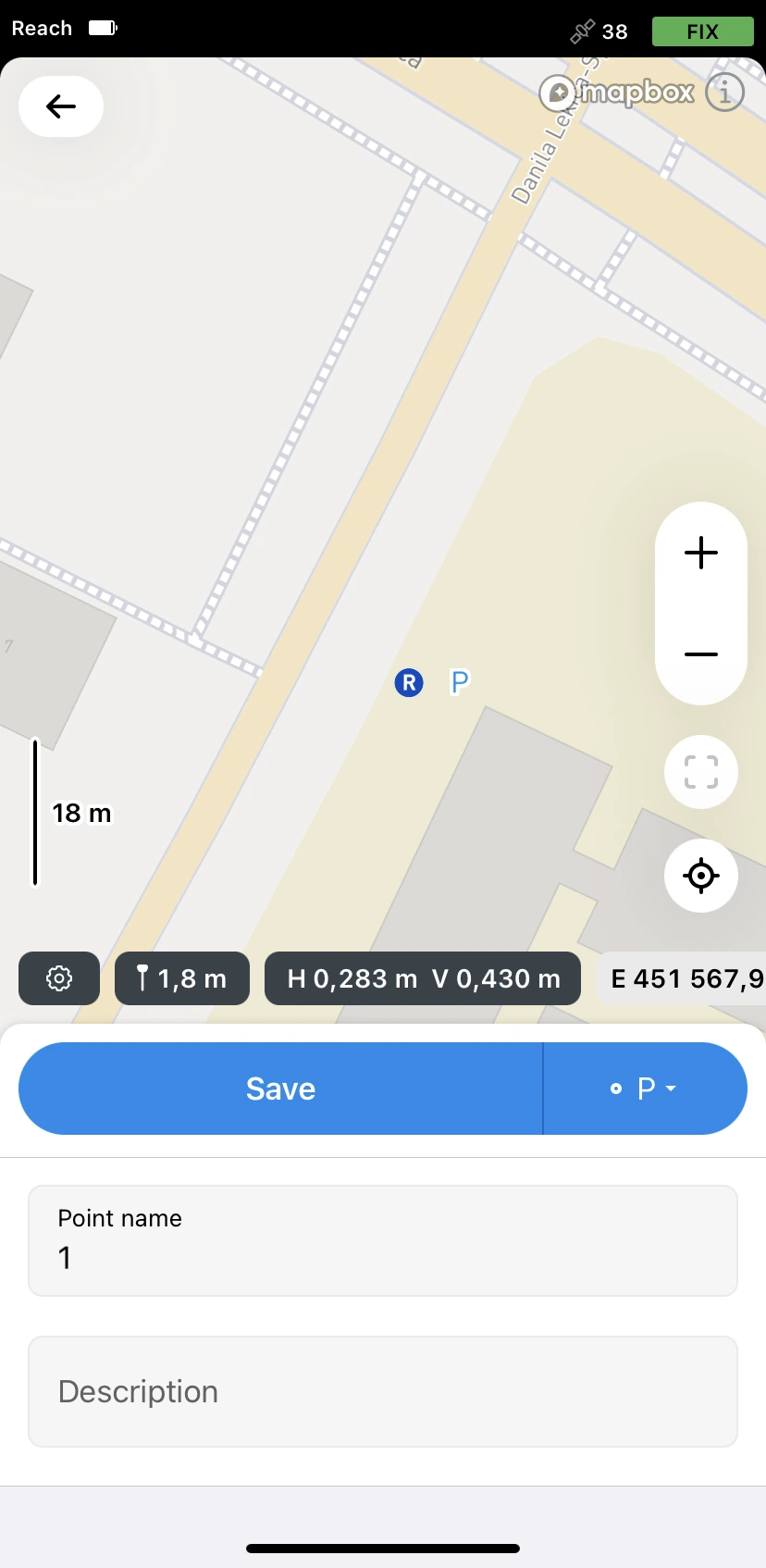
Para ajustar la configuración del levantamiento, pulsa el icono de engranaje y activa o configura las siguientes opciones:
- Solo para Reach RS3: compensación de inclinación. Puedes activar y desactivar la compensación de inclinación.
- Control de precisión. Puedes configurar tu receptor para que solo recoja datos cuando tu Reach tenga el estado de solución FIX.
- Límite de precisión. Puedes establecer valores de tolerancia de precisión horizontal y vertical. Las unidades para estos valores son las mismas que las establecidas para tu proyecto.
- Modo de recolección. Puedes especificar el intervalo de tiempo de la recogida de datos: selecciona el modo instantáneo, establece el tiempo de promedio o aplica el modo de recogida automática por tiempo o por distancia. La recolección automática está disponible en el plan
 .
.


-
Con el
plan de suscripción, puedes seleccionar el código de levantamiento que quieres utilizar pulsando el botón Code selector (Selector de códigos).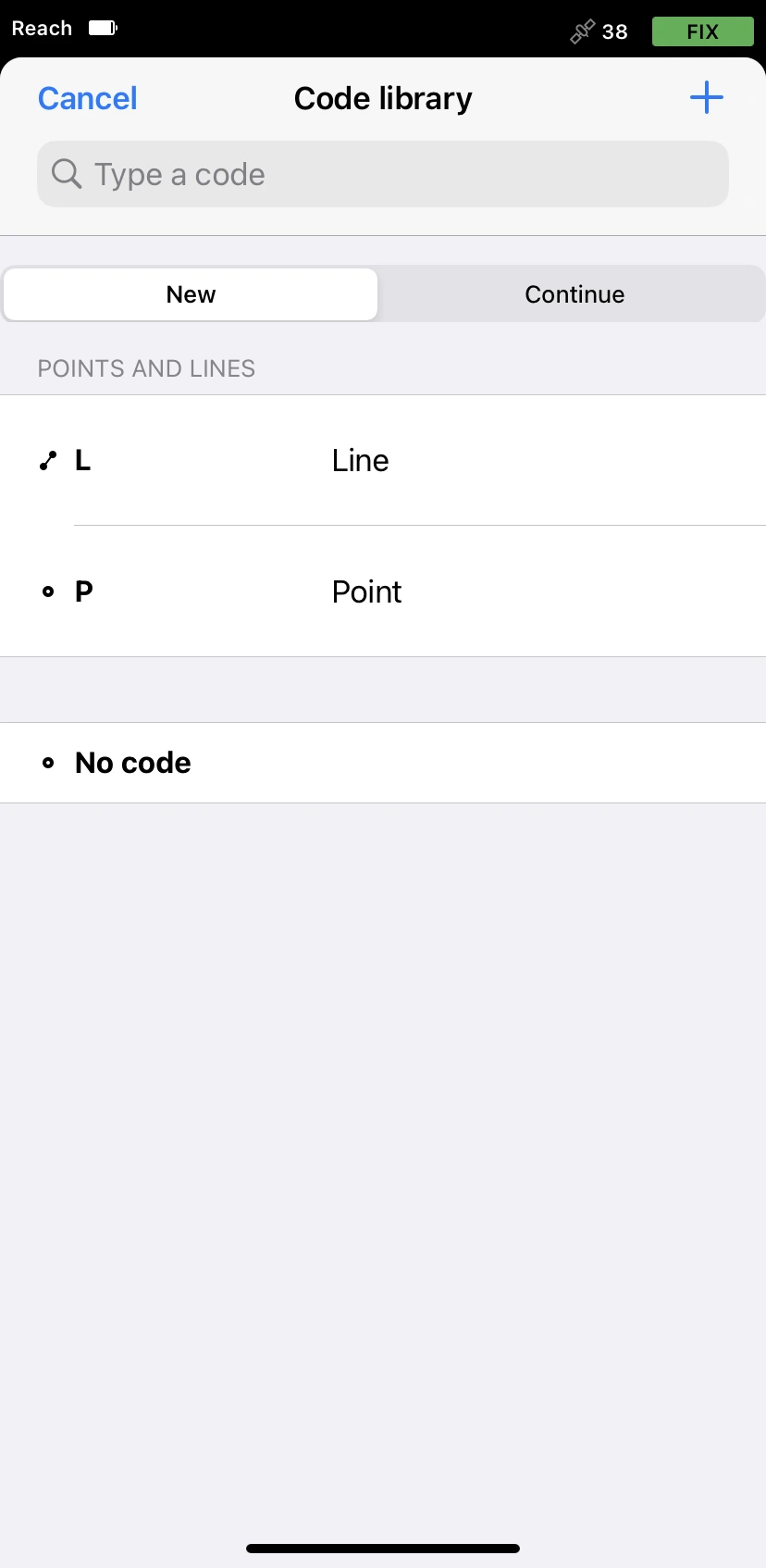
-
Recolecte el punto. Una vez finalizado el proceso, el punto capturado aparecerá en el mapa.
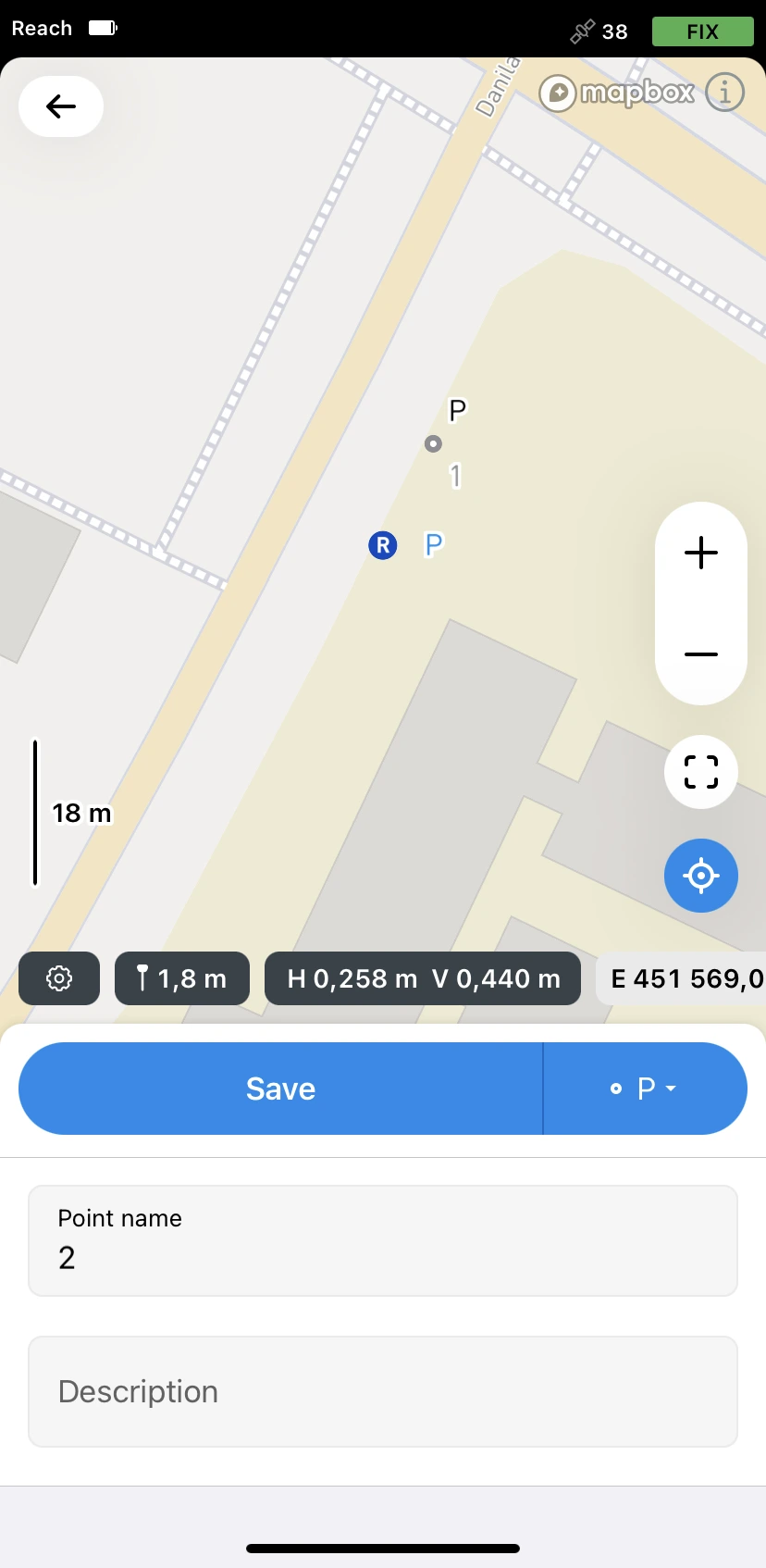
Puedes seguir midiendo o guardar los puntos para almacenar su posición en un proyecto.